2026年智能电动汽车驱动技术路线分析显示,轮毂电机(IWM)作为分布式驱动的终极方案,将电机、逆变器等集成于轮毂内,实现极致空间优化和动力响应(延迟低至1ms)。轴向磁通电机成为技术突破点,但簧下质量仍是主要挑战,需通过轻量化材料和主动悬架解决。轮边驱动在性能与成本间取得平衡,成为高端车型首选,支持扭矩矢量控制等先进功能。中央电机凭借成熟可靠、成本优势仍占据市场主流(85%-90%份额)。效率对比显示轮毂电机系统效率最高(94%-96.5%),但中央电机在成本和可靠性上更具优势。不同驱动方案将根据车型定位和需求共存发展。


在 2026 年的智能电动汽车技术路线图中,轮毂驱动(In-wheel Motor, IWM) 被公认为分布式驱动架构的"终极方案"。它将电机、减速器、逆变器以及制动系统完全集成在车轮轮毂内部,彻底取消了传统意义上的"底盘动力总成"。
以下是关于轮毂驱动技术的深度解析:
1. 核心架构:高度集成的轮端单元
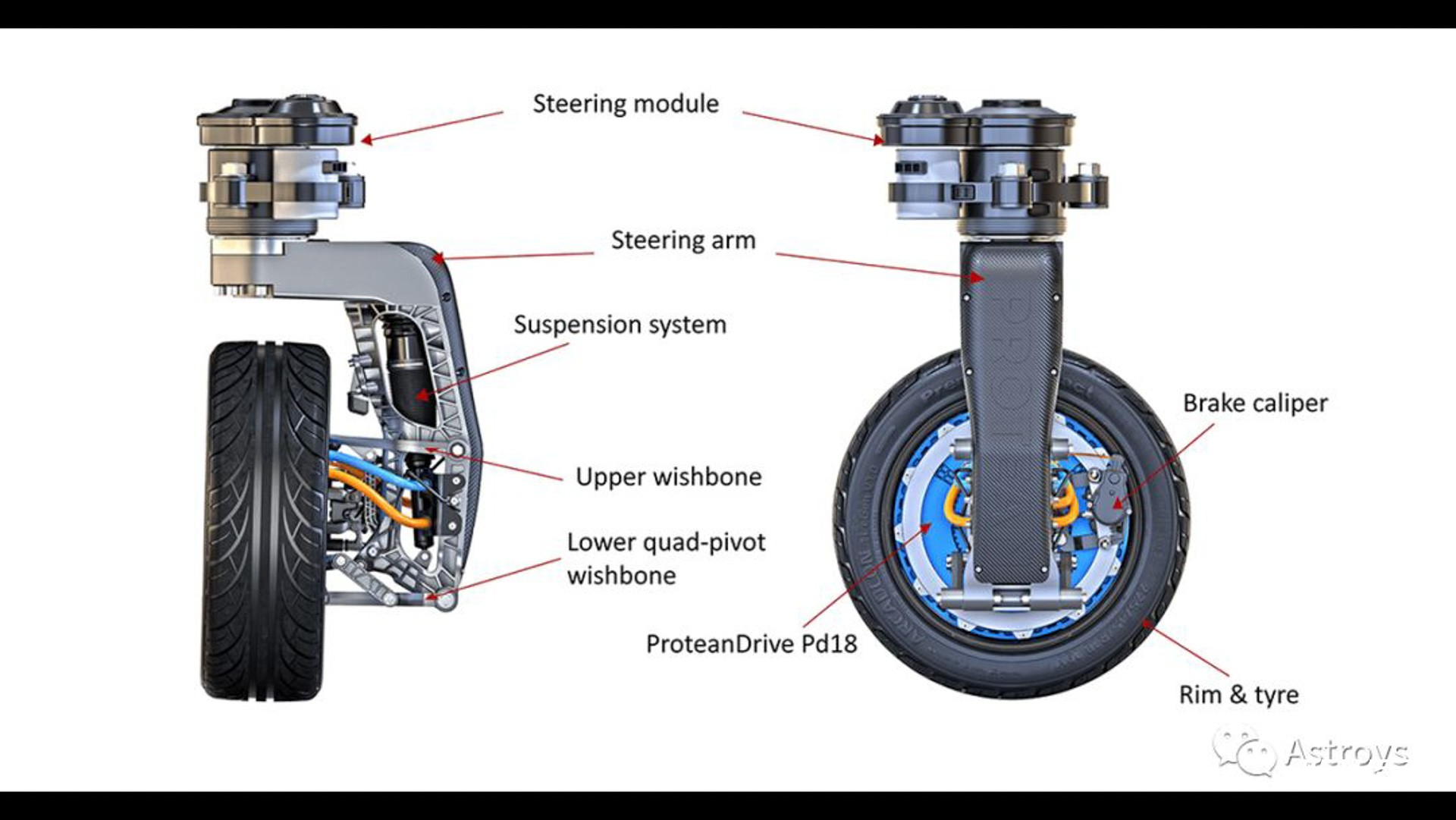
轮毂电机不只是一个旋转的马达,它是一个精密的机电一体化系统。在 2026 年的主流设计中,一个典型的轮毂单元包含:
-
外转子电机: 转子直接与轮辋(Rim)连接,定子固定在悬架支架上。
-
功率电子(SiC Inverter): 微型化的碳化硅逆变器直接集成在电机后盖,大幅减少了高压电缆的长度和电磁干扰。
-
制动系统: 采用特殊的环形制动盘或与电机再制动深度耦合的 EMB(电子机械制动)。
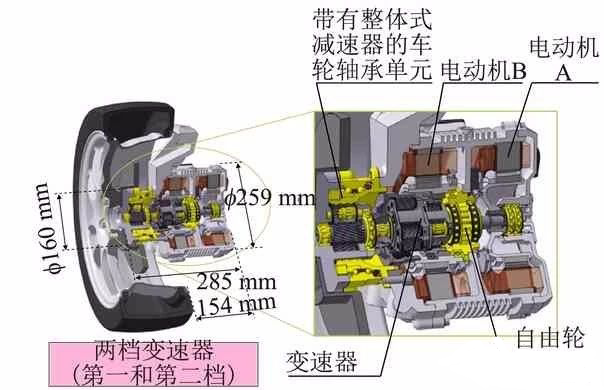
2. 2026 年的技术分水岭:轴向磁通(Axial Flux)
传统的径向磁通电机由于轴向长度较长,很难塞进轮毂。2026 年,以 YASA 和 Protean 为代表的厂商推动了轴向磁通电机的商业化:
-
形态优势: 呈现为"薄饼(Pancake)"状,非常契合轮毂扁平的空间需求。
-
性能提升: 扭矩密度极高。根据公式,轴向磁通电机的转矩 T 与直径 D 的三次方成正比(T \\propto D\^3),而径向电机仅与二次方成正比(T \\propto D\^2 \\cdot L)。这使得 20kg 左右的轮毂电机即可输出高达 2500\\text{ Nm} 的峰值扭矩。
3. 核心争议:簧下质量(Unsprung Mass)
这是阻碍轮毂电机普及的最大技术门槛。
-
物理挑战: 将几十公斤的电机加在车轮上,会显著增加簧下质量,导致悬挂系统对路面颠簸的响应变慢(就像穿了重铅块跑步),影响舒适性和贴地性。
-
2026 解决方案:
-
质量中性化(Mass-neutral): 通过取消半轴、差速器、传动轴等减去的重量,抵消轮端增加的重量。
-
主动悬架补偿: 利用全主动悬架(Active Suspension)的主动作用力,实时抵消轮端惯性产生的冲击。
-
轻量化材料: 使用碳纤维复合材料外壳和空心轴设计,将单轮增加的净重控制在 15-20\\text{ kg} 以内。
-
4. 优势与挑战对比
| 优势 (Pros) | 挑战 (Cons) |
|---|---|
| 空间极致优化: 彻底取消传动轴,底盘可实现真正的"滑板化",舱内空间提升 30\\%。 | 严苛环境: 轮毂内面临剧烈振动、刹车高温及泥水入侵(需 IP69K 防护)。 |
| 全向移动: 车轮可实现 90\^\\circ 转向,支持"蟹行"和原地转向。 | 成本高昂: 四个电机、四套逆变器的总成本远高于单电机系统。 |
| 极致传动效率: 零传动损耗,动力响应延迟从 50\\text{ms} 降低至 1\\text{ms} 级别。 | 功能安全: 必须具备极高的冗余设计,防止高速时单个轮毂电机因电气故障产生非预期制动。 |
5. 2026 行业现状与落地
-
高端性能车: 部分欧洲超跑厂商已宣布在 2026 年款车型中采用 Protean 的 220kW 轮毂单元,追求极致的扭矩矢量控制。
-
物流与微型出行: 在城市最后一公里配送车和 Robotaxi 上,轮毂电机凭借转弯半径小(原地转向)和空间利用率高,已进入大规模试运营阶段。
-
领军企业: 斯洛文尼亚的 Elaphe 、英国的 Protean Electric 以及被奔驰收购后的 YASA 是目前该领域的三大巨头。

在 2026 年的智能电动汽车架构中,轮边驱动(Wheel-side Drive) 被视为实现"极致操控"与"全地形自适应"的主流分布式驱动技术方案。相比于传统的中央驱动(单电机或双电机)和激进的轮毂驱动(In-wheel Motor),轮边驱动在技术成熟度、簧下质量控制与动力性能之间取得了最佳平衡。
以下是关于轮边驱动技术的深度解析:
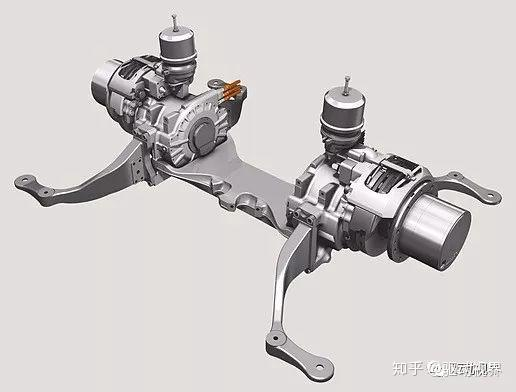
1. 核心定义与物理架构
轮边驱动是指每个车轮由一套独立的动力单元驱动,但电机并不置于车轮内,而是安装在**车架(簧上质量)**上。电机通过短半轴(Half-shaft)和万向节将动力传递至轮端。
-
硬件组成:
-
独立电机: 通常采用超高转速(2026 年行业基准已达 25,000 - 30,000\\text{ rpm})的永磁同步电机(PMSM)。
-
减速器: 紧凑型行星齿轮机构,用于匹配电机的高转速与轮端的大扭矩需求。
-
传动机构: 包含等速万向节(CVJ)的短半轴,允许悬架在大行程摆动时依然稳定传递动力。
-
-
动力传递方程:
T_{wheel} = T_{motor} \\cdot i_{reducer} \\cdot \\eta_{transmission}
其中,T_{wheel} 为轮端总扭矩,i_{reducer} 为减速比(通常在 10-15 之间),\\eta 为总传动效率(2026 年先进架构可达 97\\% 以上)。
2. 轮边驱动 vs 轮毂驱动(技术博弈)
在分布式驱动的演进路线中,轮边驱动凭借其对动态性能的友好性成为当前百万级高性能车的首选。
| 维度 | 轮边驱动 (Wheel-side) | 轮毂驱动 (In-wheel) |
|---|---|---|
| 簧下质量 | 轻(电机在车架上,不影响悬挂响应) | 重(增加几十公斤,导致舒适性下降) |
| 散热能力 | 强(可接入整车主液冷系统) | 弱(散热空间局促,易发生热衰减) |
| 维护性 | 较好(与传统结构相似,易拆卸) | 困难(与轮毂/制动深度集成) |
| 环境抗性 | 高(远离地面泥沙、水汽和热源) | 挑战大(面临高温、震动与涉水) |
| 传动机构 | 需半轴,机械复杂度稍高 | 零传动或简单减速,效率极高 |
3. 2026 年核心技术特征
(1) 1000V 全域高压与 SiC 深度集成
2026 年的轮边驱动总成普遍采用了第二代碳化硅 (SiC) 功率模块,并适配 900V - 1000V 高压平台。
- 优势: 显著降低高频开关损耗,支持电机在 25,000\\text{ rpm} 以上的长时高效运行,并使整车具备 5\\text{C} 以上的超级快充能力。
(2) AI 驱动的扭矩矢量分配 (Intelligent TVC)
由于四个电机完全独立解耦,系统可以实现毫秒级的闭环扭矩控制(响应时间 \\le 10\\text{ms})。
-
坦克掉头(Tank Turn): 通过两侧电机反向旋转实现原地转圈。
-
动态侧滑补偿: 在冰雪路面或高速过弯时,系统根据偏航角速度(Yaw Rate)传感器数据,自动增加外侧轮扭矩或减小内侧轮扭矩,修正不足转向或过度转向。
(3) 多合一高度集成化
主流供应商(如博世、汇川、联合电子)已推出**"四合一"或"七合一"**轮边动力单元。
- 集成内容: 将电机、减速器、逆变器(MCU)、甚至部分动力域控制逻辑集成在一个铝合金壳体内,体积比上一代减小 20\\%,功率密度突破 3.5\\text{ kW/kg}。
4. 典型应用案例:比亚迪"易四方"
2026 款仰望 U8/U9 是轮边驱动技术的标配代表:
-
独立控制: 四个电机独立控制四个轮端,整车最大马力超过 1200\\text{ PS}。
-
安全冗余: 即使单一轮胎爆胎,系统也能通过其余三个电机的扭矩补偿,以 120\\text{ km/h} 的速度维持车辆直线行驶。
-
应急浮水: 利用轮边电机对四个车轮转速的精准控制,车辆可以在水中像船一样拨水前进并转向。
5. 数据流与控制逻辑
在您的技术文档中,可以参考以下基于**区域化架构(Zonal Architecture)**的数据交互逻辑:
-
感知层: 中央计算平台(CCP)获取踏板位置、转向角、轮速、惯性单元(IMU)及 ADAS 视觉信息。
-
决策层: 通过 SOME/IP 协议(基于 1Gbps 以太网)将扭矩指令发送至动力域控制器(PDC)。
-
执行层: PDC 将最终扭矩值下发给四个轮边 MCU,通过高频 PWM 信号驱动电机。
已经了解了极致的分布式驱动(轮边与轮毂)之后,回归到中央电机驱动(Central Motor Drive),我们会发现它依然是 2026 年全球新能源汽车市场的"绝对主力"。
如果说轮边和轮毂电机是"特种兵",那么中央电机就是整编师的"中坚力量"。它是指将电机安装在车桥中间,通过减速器 和差速器将动力分配给两侧车轮的传统电动化布局。
以下是中央电机驱动系统的深度解析:
1. 核心架构:经典而高效
中央电机系统的核心在于"集中"。它延续了内燃机时代部分成熟的底盘布局,但进行了深度的电能化改造。
-
动力传递路径:
电机(高转速) \\rightarrow 减速器(增扭) \\rightarrow 差速器(核心部件) \\rightarrow 半轴 \\rightarrow 车轮。
-
差速器的意义: 相比分布式驱动靠软件控制转速差,中央电机通过机械差速器实现左右轮在转弯时的物理转速耦合。这是一种极其可靠且低成本的方案。
-
物理公式: 轮端总扭矩 T_{sum} = T_{motor} \\times i \\cdot \\eta。
2. 2026 年的技术演进:从"三合一"到"多合一"
在 2026 年,中央电机不再是一个简单的马达,而是一个高度集成的动力总成(e-Axle)。
-
X-in-1 深度集成: 主流厂商(如华为、比亚迪、博世)已实现 8 合 1 甚至 12 合 1 系统。
- 集成内容: 电机、减速器、控制器(MCU)、直流转换器(DCDC)、车载充电机(OBC)、配电单元(PDU)、整车控制器(VCU)以及热管理模块。
-
优势: 这种集成化设计极大地减少了高压线束的重量和体积,系统效率相比零散布局提升了 3\\%-5\\%。
3. 中央电机 vs 分布式驱动:优劣势对比
| 维度 | 中央电机驱动 (Central) | 分布式驱动 (Wheel-side/In-wheel) |
|---|---|---|
| 成本控制 | 极高(一套系统驱动两轮,零件少) | 较低(需多套电机与逆变器) |
| 技术成熟度 | 极高(机械结构可靠,标定容易) | 研发中(控制算法复杂) |
| 簧下质量 | 极轻(电机在车架上) | 较重或极重 |
| 操控灵活性 | 依靠机械差速器或 ELSD | 极致(支持扭矩矢量、坦克掉头) |
| 空间利用 | 占用副车架中心空间 | 彻底释放底盘中心空间 |
| 2026 市场占比 | 约 85\\%-90\\%(大众、豪华品牌主力) | 约 10\\%(超跑、高端越野、特种车) |
4. 核心关键技术(2026 基准)
-
超高转速: 为缩小体积,中央电机的额定转速普遍达到 22,000 - 25,000\\text{ rpm}。这对其轴承的动平衡和材料强度提出了极高要求。
-
碳化硅 (SiC) 逆变器: 2026 年中高端车型的中央电驱系统已全面标配 SiC 模块,显著提升了在城市拥堵路段(频繁起停)的能效。
-
电子限滑差速器 (e-LSD): 为了弥补单电机无法独立控制单轮扭矩的遗憾,高端中央电驱会配备 e-LSD,通过电子离合器实现左右轮的动力分配,从而在弯道中获得更好的循迹性。
5. 建议
可以将中央电机定位为**"兼顾舒适与效率的普适性方案"**:
-
NVH 优势: 由于电机安装在副车架上,可以通过多级悬置(Mounting)来隔绝高频电磁啸叫,这比轮边或轮毂电机更容易做出"极致静谧"的座舱。
-
热管理简单: 中央电机的液冷接口可以集中布置,与电池的热管理回路(Heat Pump)深度耦合,实现能量的最优利用。
-
安全性: 传统的差速器保证了左右轮永远不会出现方向相反的异常扭矩(除非差速器断裂),在功能安全上比分布式驱动更容易过 ASIL-D 认证。
在新能源汽车的动力系统中,能量从电池流向车轮需要经过多个转换和传递环节。每一个环节(节点)都会产生一定的能量损耗。
以下是针对中央电机 、轮边电机 和轮毂电机在系统能量传递效率(Efficiency Chain)上的量化对比表格,基于 2026 年行业主流技术标准(如 SiC 逆变器、高转速永磁同步电机等)整理:
动力系统能量传递效率量化对比表 (2026 基准)
| 能量传递环节 | 中央电机驱动 (Central) | 轮边电机驱动 (Wheel-side) | 轮毂电机驱动 (In-wheel) | 备注 |
|---|---|---|---|---|
| 1. 逆变器 (MCU) | 98.0% - 99.0% | 98.0% - 99.0% | 97.5% - 98.5% | 轮毂电机 MCU 集成度极高,散热挑战略大,效率微降。 |
| 2. 电机 (Motor) | 96.0% - 97.5% | 95.5% - 97.0% | 92.0% - 95.0% | 轮毂电机通常为外转子或低速大扭矩,效率区间略窄。 |
| 3. 减速器 (Reducer) | 97.5% - 98.5% | 98.0% - 99.0% | 99.0% - 100% | 轮毂电机多为直驱(100%)或单级行星减速。 |
| 4. 差速器 (Diff) | 98.0% - 99.0% | 无 (0%) | 无 (0%) | 分布式驱动通过电子差速实现,无机械损耗。 |
| 5. 半轴与万向节 | 98.5% - 99.5% | 99.0% - 99.5% | 无 (0%) | 轮毂电机动力直接作用于轮辋。 |
| 综合系统效率 (Peak) | ~89.0% - 92.5% | ~91.0% - 94.5% | ~94.0% - 96.5% | 轮毂电机系统效率最高。 |
核心差异点深度解析
1. 中央电机:机械损耗的"累加效应"
中央电机方案链路最长。能量必须经过主减速器 和机械差速器 ,再通过长半轴传递。虽然单个机械零件的效率很高(>98%),但多级连乘后的综合损耗最为明显。特别是在转弯工况下,机械差速器的内部摩擦会进一步降低效率。
2. 轮边电机:精简了核心机械损耗
轮边驱动最大的效率优势在于取消了机械差速器。由于左右轮独立控制,省去了差速器齿轮啮合的损耗。同时,由于电机更靠近轮端,半轴更短且角度偏移较小,万向节的传动效率(CV Joint Efficiency)更趋近于理论最大值。
3. 轮毂电机:通向"零传动损耗"的终极路径
轮毂电机(尤其是直驱方案)彻底消除了所有中间机械传动部件:
-
优势: 能量直接在轮内完成电能到机械能的转换,机械效率几乎为 100\\%。
-
折损项: 为了抵消取消减速器带来的扭矩损失,轮毂电机通常需要更大的电流或更多的极对数。这会导致电机的**铜损(Copper Loss)**增加,因此在表格中,轮毂电机的"电机效率"环节略低于高转速的中央电机。
综合评价与选型逻辑
-
追求最高续航 (Efficiency First): 轮毂电机是理论最优解。在城市频繁起停工况下,由于没有传动机构惯性,其回收能量的效率也更高。
-
追求综合平衡 (Balanced Performance): 轮边电机是目前的"性能甜点位"。它规避了轮毂电机的簧下质量问题,同时比中央电机提升了约 2\\%-3\\% 的系统效率,这对于高端性能车增加 20-30\\text{km} 续航至关重要。
-
追求成本与可靠性 (Cost-Effective): 中央电机虽然系统效率排在末位,但其散热方案成熟、成本极低且机械结构极其耐用,依然是 90\\% 以上量产车的首选。