⒈将电脑 IP 更改成如下设置或者同一 IP 段内即可;
|---|-------------------------------------------------------------|
| |
| |  |
|
⒉将网线用电脑和机器人连接;
|---|-------------------------------------------------------------|
| |
| | |
⒊打开 Workvisual 软件(以下简称 WV 软件);
软件打开后入下图 1 所示:
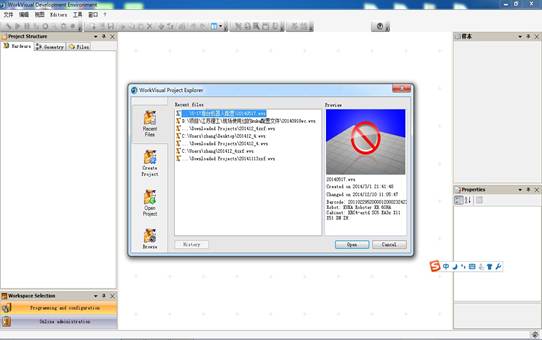
图1 WV软件打开界面
在 WV 软件的窗口中如图2所示:
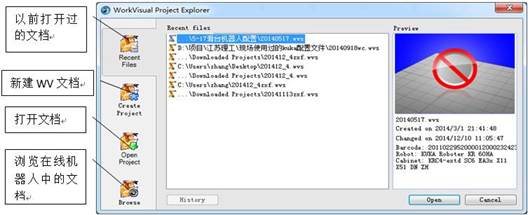
图2 项目文件选择
当选择 Browse 时,界面如图3所示,刷新后显示项目文件,带"绿色箭头" 标志的为当前项目(在打开项目后将当前项目另存为文件,以免将原来的项目覆盖,在出问题时可以用此项目恢复。)。
图3 选择Browse
打开 VW 文件后,界面如图 4 所示:
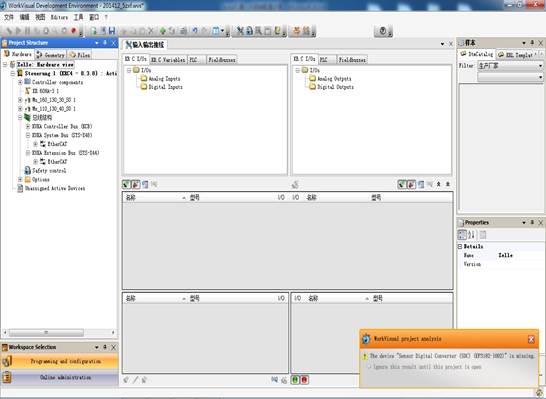
图 4 开发环境
⒋拍下外部轴电机的型号,如图5查找电机的 Art-Nr号,对应KUKA文件,查找电机的型号:

图 5 电机型号
例如图5中的电机订货号后六位是 121216,参考KUKA文件中如图6,可查出电机型号为MX_110_130_40_S0。
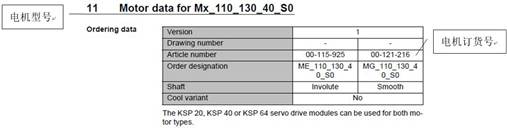
图6 电机型号示例
⒌现在开始添加外部轴,当KUKA机器人有两个外部轴系统时,原则上先添加直线导轨外部系统,再配旋转轴外部系统。下面配置的示例就是直线导轨外部轴:单击 geometric view 项中右击添加 Mx_110_130_40_S0,如图7所示。
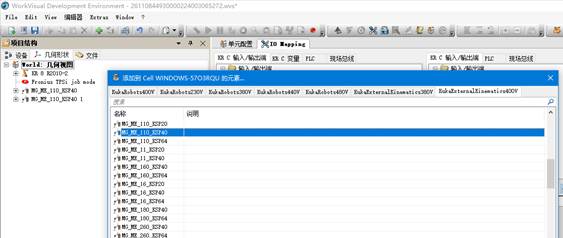
图7 添加外部轴电机
当不显示如"Kuka External Kinematics400V"选项时,如下图8所示File>>项目管理,在弹出界面选择左侧需求选项,点击">"即可将需求选项移入右侧框,表示该选项已导入项目,即可在图7中显示如"Kuka External Kinematics400V"选项。完成后点击"关闭"即可。
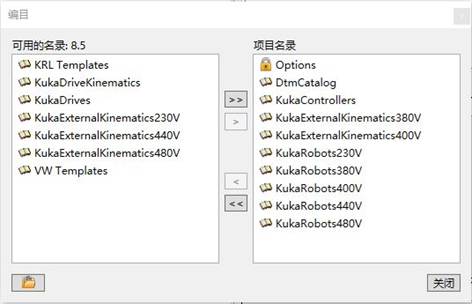
图8 导入项目名录
⒍将外部轴添加到"几何形状"项目树下,如添加外部轴"MG_ME_110_KSP40"和"MG_ME_110_KSP40 1"及外部轴电机参数铭牌如图9所示:

图9 添加外部轴及外部轴电机铭牌
⒎将外部轴与机器人控制柜建立连接(机器人控制柜可配置外部轴数量要不小于实配外部轴电机数量),方法是在"单元配置"界面,鼠标分别点选拖住外部轴"MG_ME_110_KSP40"和"MG_ME_110_KSP40 1"分别拖入控制柜建立如图10所示连接,表示外部轴与控制柜建立连接。
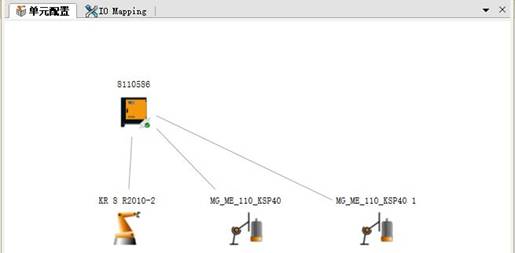
图10 外部轴与控制柜创建连接
在"设备"树目录下,如图11所示:

图11 设备树目录界面下外部轴
双击外部轴,如"设备"树目录下"MG_ME_110_KSP40"弹出关于外部轴电机的相关设置内容如下图12所示,包括"软件限位开关"、"起始位置和公差"、"单元参数"、"通用参数"、"机器转换"、"DefaultAxisName-驱动器1"和"DefaultAxisName-轴的属性":
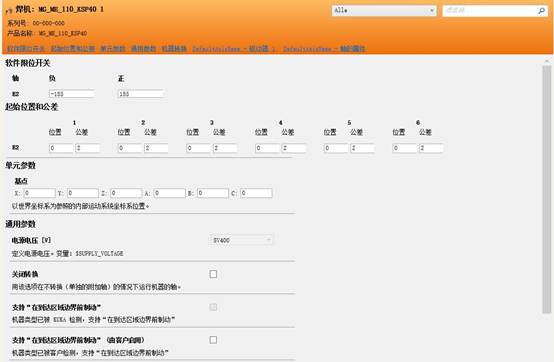
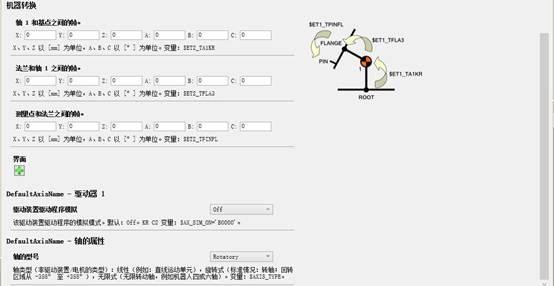
图12 外部轴参数配置(默认)
⒏外部轴校正,如图13所示,通过示教器控制外部轴电机转至合适位置,选择示教器主菜单"投入运行>调整>参考",在弹出界面,选中对应外部轴,如"外部轴1",点击下方"校正"即可。
当需要重新标记外部轴时,需要取消"校正",方法为在图13左图界面选择"去调节",进入界面如图14所示,选择对应轴,点击下方"取消校正"按键。
正常状态"下机器人轴1"到"机器人轴6"机器人厂家出厂时,各轴零点位置已标记完成,不需要校正,只需校正机器人外部轴即可。校正方法在现场无EMD时,通过"参考"和"去调节"人工校正。
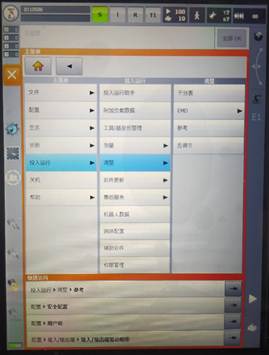

图13 外部轴校正
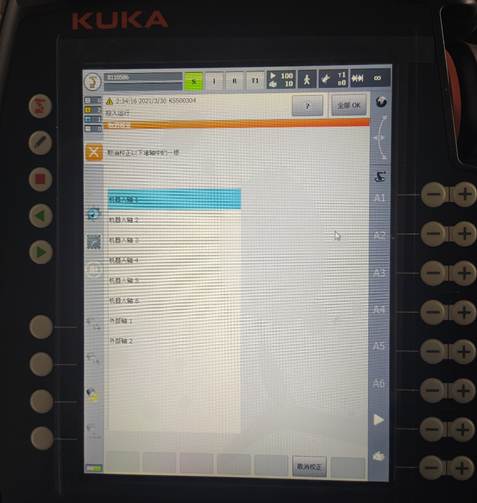
图14 机器人轴及外部轴取消校正
⒐如图15所示,配置正常的外部轴在示教器右侧会显示附加轴信息,选中附加轴后外部轴标记为"E1"或"E2(如两个外部轴)",此时通过示教器使能通过控制如图"E1"后的"-"和"+"即可控制该电机运转。

图15 外部轴配置成功
注:如下图所示,配置完外部轴后示教器出现如下报警:
如下图选择"配置>安全配置"
在弹出如下图界面,任意一项,选择"现在激活"即可解除上述报警。
注:机器人外部轴电缆连接:


