⒈硬件准备
⑴伏能士焊机,焊机型号:TPS 400i,支持EtherCAT协议;
⑵伏能士焊机说明文件"ESI_FRONIUS_FB_INSIDE_ETHERCAT GENERIC REVx00000009";
⑶库卡机器人,机器人型号:KR8R2010-2;
⑷将KUKA软件包"KUKA_OPT"和"WorkVisual"拷贝至笔记本桌面,避免中文路径过长可能导致无法安装识别软件;
⑸通过网线将伏能士焊机连入库卡机器人X44网口,网线插接口分别如下图所示:


⒉通讯配置
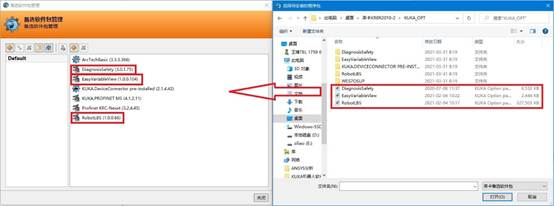
⑴打开WorkVisual软件(该软件需适配当前对应KUKA机器人或安装KUKA机器人提供的WorkVisual软件),在软件界面点击"Extras>备选软件包管理",在图示界面点击"+"添加KUKA机器人弧焊软件包如图所示:
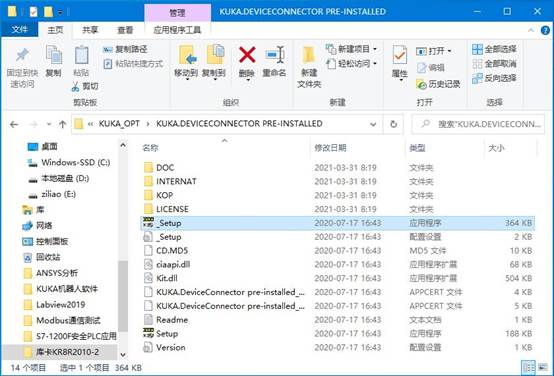
⑵安装KUKA预安装文件,位于"KUKA_OPT\KUKA.DEVICECONNECTOR PRE-INSTALLED\ _Setup"路径下,如下图:
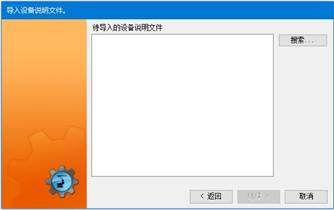
⑶导入伏能士焊机说明文件,点击"File>Import/Export",在"输出部分项目"界面点击选择"导入设备说明文件。"如下图所示:
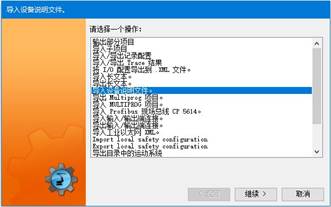
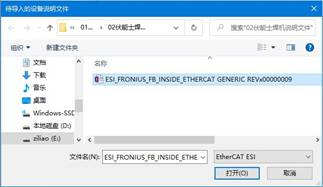
点击"继续",在弹出界面点击"搜索...":
在弹出界面按如下图所示选择:
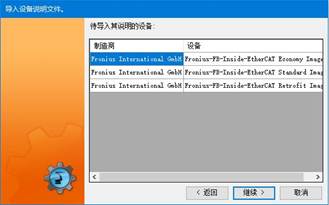
在弹出界面如下图点击"继续":
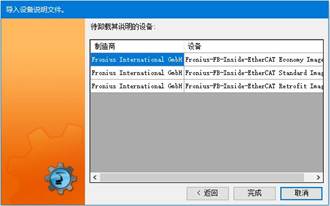
在弹出界面点击"完成":
在弹出界面点击"关闭",至此伏能士焊机的说明文件导入WorkVisual软件完成。
⑷进入WorkVisual配置界面,选择图示位置,点击"打开"(由于演示文件均已配置完成,文中仅对配置方法进行说明介绍):
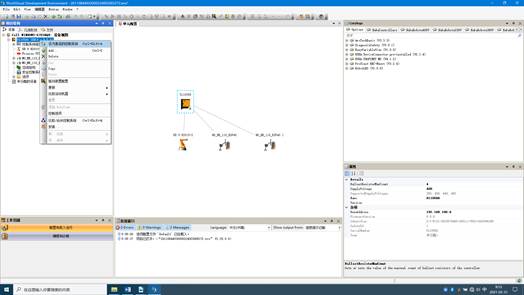
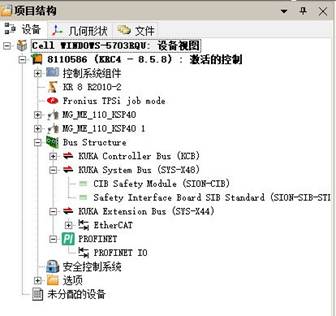
⑸在"项目结构/设备"下右击如图"8110586(KRC4-8.5.8)"选择"设为激活的控制系统":
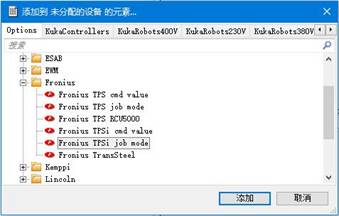
⑹添加伏能士弧焊说明文件:鼠标右键点击"项目结构/未分配的设备"选择"Add..."
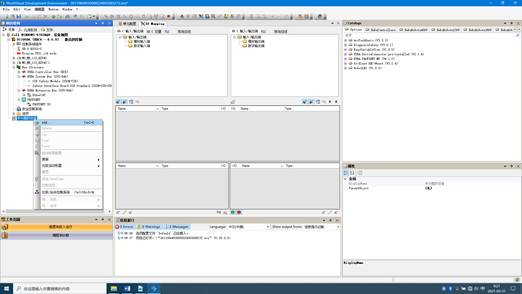
在弹出界面选择"Fronius TPSi job mode",点击"添加",并将该说明文件拖至"KR 8 R2010-2"下。
⑺添加伏能士焊机EtherCAT通讯,在"项目结构/Cell WINDOWS-5703RQU:设备视图/8110586(KRC4-8.5.8):激活的控制/Bus Structure/KUKA Extension Bus(SYS-X44)/EtherCAT"右击鼠标选择"Add..."
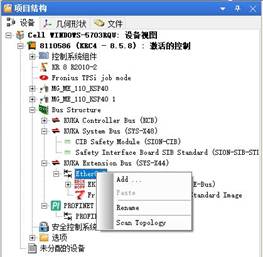
在弹出界面选择如图所示,点击"确定":
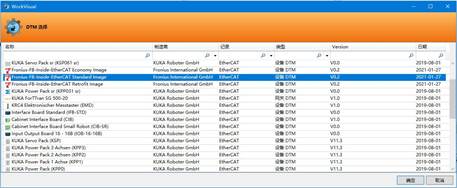
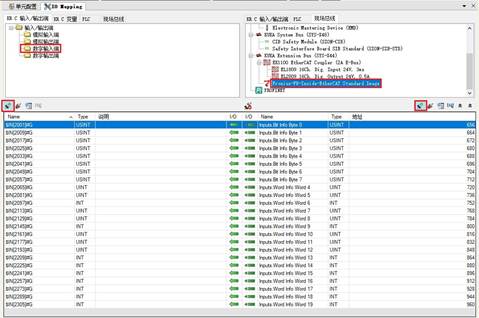
在如下图界面,点击选中"Fronius-FB-Inside-EtherCAT Standard Image"点击" "进行伏能士焊机EtherCAT通讯的IO映射:
"进行伏能士焊机EtherCAT通讯的IO映射:
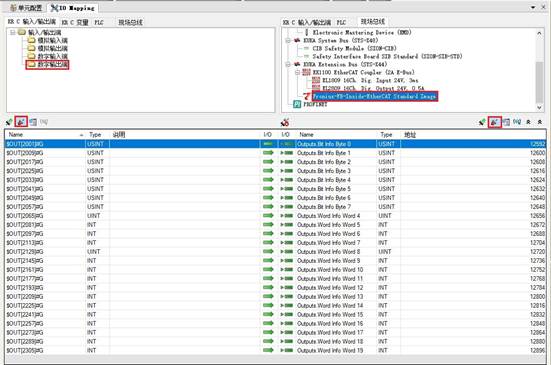
如图IO映射仍是数字输入对输入输出对输出,输入、输出映射默认均从2001开始至2305结束,本案例已映射完成:
输入映射:
输出映射:
注:
①选择点范围技巧如IN\[2001\]#G至IN2305#G,鼠标先选中IN\[2001\]#G,然后拖动目标条至IN2305#G,按下"Shift"键鼠标选中IN\[2305\]#G即可选中IN2001#G至$IN2305#G范围点;
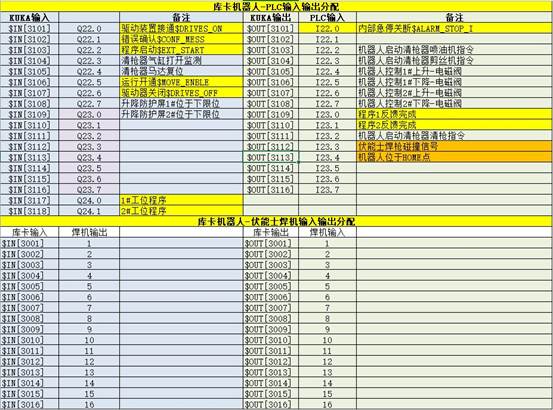
②在实际使用中为采集伏能士焊枪防碰撞,通常采集焊枪的碰撞识别信号,如下图"3112"信号即为KUKA机器人与西门子1200PLC通过PN通讯映射的信号(详见"西门子SMART200系列PLC与KUKA机器人进行Profinet通讯"涉及的相关通讯介绍,PLC以映射点的常闭信号引入程序);
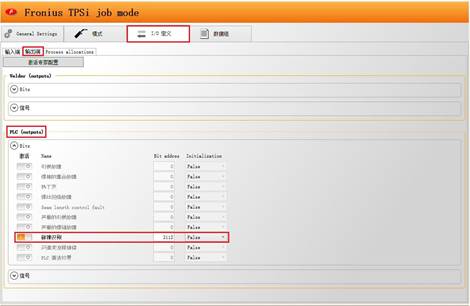
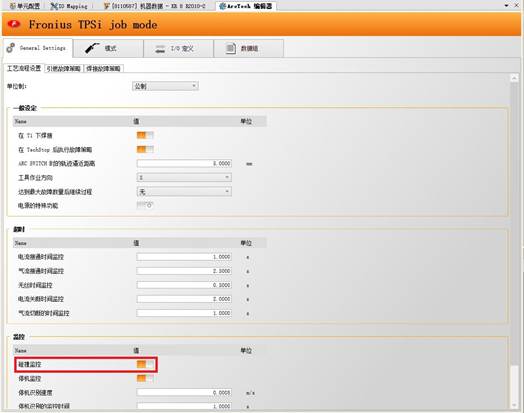
注:如下图所示,要实现上图开通"碰撞识别"信号,则需要在"General Setting"界面激活图示"碰撞监控"功能,否则上图"碰撞识别"信号通过西门子PN通讯的PLC无法采集到该信号。
③本文档案例参考"200435-陈亮-100 牧原机器人焊接设备"项目应用编制,该项目中PLC与KUKA机器人基于西门子PN通讯的地址映射及功能点描述,以及KUKA机器人外部IO映射地址如下图所示:
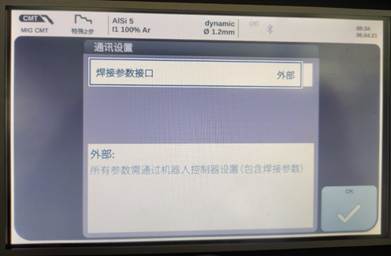
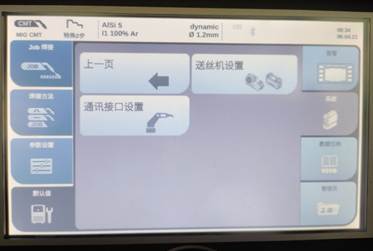
④与KUKA机器人建立通讯前,需将伏能士焊机需将"通讯接口设置"改为"外部",过程如下:
步骤一:进入如下图主界面,并点击"下一页":

步骤二:在下图界面,点击"通讯接口设置":
步骤三:在下图界面,按下显示屏下方调节旋钮,将"焊接参数接口"由"内部"改为"外部":
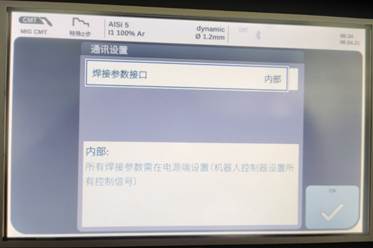
步骤四:点击右侧"OK"退出设置。