Unitreo Go2 系统架构涵盖了Go2本体、一般应用和二次开发等多方面内容。
1.1.1 系统架构说明
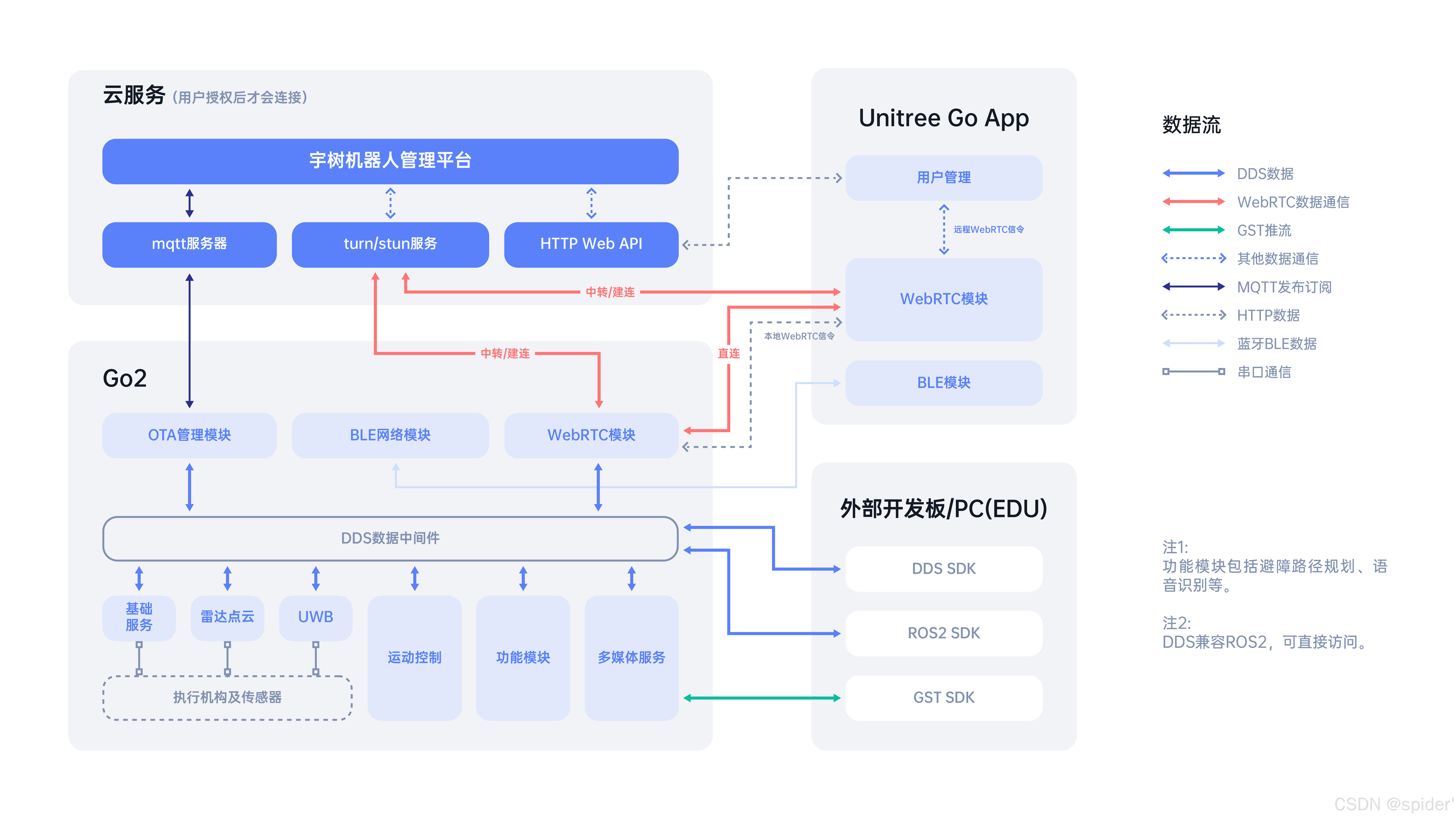
unitrego go2 系统架构如下图所示:
Go2
- OTA 模块通过 mqtt 与云服务器通信,负责上传故障信息、系统升级、并转发 WebRTC 信令。
- WebRTC 模块实现与 App 的主要数据管道,包括音视频流、雷达点云、运动状态及控制指令。
- 蓝牙(BLE)部分用来和 App 建立联系,主要用于配置网络和安全验证。
- 各个功能模块之间的通信主要采用 DDS 实现,DDS IDL 兼容 ROS2(需要选择适配的 RMW),EDU 版本可以通过 DDS 或 ROS2 调用接口。
- 电机、雷达、UWB 等传感器数据通过串口收集再转发到 DDS 中间层。
- EDU 及以上版本的多媒体模块面向二次开发,支持 GST 推流。
云服务的通信: - mqtt 用来建立与每条机器狗的物联网通信,负责监控故障、系统升级、传递 WebRTC 信令。
- http 服务连接 App 和 Web 前端,建立用户与狗的绑定关系。
- turn/stun 服务器用来帮助 WebRTC 点对点连接,并在无法实现点对点连接时提供服务器数据转发。
App
- 用户管理模块,通过 HTTP Web API 连接宇树管理平台。负责绑定狗、WebRTC 建连等功能。
- Go2 的蓝牙模块,用来配置网络。
- WebRTC 模块,主要数据流量都是通过 WebRTC 实现,包括图传、点云、运动状态及控制指令下发。
开发接口
- DDS SDK,支持 C++ 以及 Python。
- ROS2 SDK 接口。
- GST SDK,仅用于图传。