注:本文转自知乎 " 微分几何 | 切向量" 相关文章。
略作重排,如有内容异常,请看原文。
csdn 篇幅所限,分篇连载。
3. 切矢的另外两种典型定义
第 2 节已经提到过,切矢实际上不止微分算子这一种定义方式。Alan U. Kennington 在他的微分几何书 11(本文的主要思路大多启发自此书)中考察了各类文献(主要为教材)中的切矢定义方式,并将考察结果汇总为一个表格,现将该表格的主要部分翻译如下:
注:笔者未逐一查阅表格中所有文献,故无法保证翻译的完全准确性。感兴趣的读者可查阅原书对应章节获取原文,并通过表格中的引用信息进一步查阅相关文献;若需简化操作,可按照表格中的序号,通过下述索引关系跳转至文末对应参考文献获取详细引用信息:1\[17、218、319、420、521、622、723、824、925、1026、1127、1228、1329、1430、1531、1632、1733、1834、1935、2036、2137、2238、2339、2440、2541、2642、2743、2844、2945、3046、3147、3248、3349、3450、3551(链接解析失败)、3652、3753(链接解析失败)、3854(链接解析失败)、3955、4056(链接解析失败)、4157、4258(链接解析失败)。]
由上述表格可见,切矢的定义形式多样,尚未形成统一共识。鉴于切矢定义的多样性,仅了解单一定义便对切矢本质做出判断,易产生片面性。在了解多种定义后,对切矢本质的判断通常可分为以下三种情形:
- 仍认定其中一种定义可表征真正的切矢;
- 所有定义均无法表征真正的切矢,真正的切矢存在于数学体系之外,各类定义均是对该数学外对象的数学化实现;
- 切矢是所有定义的综合,不同定义之间的等价性通过一种称为"自然同构9"(链接解析失败)的等价关系得以确认。
本文采用第二种观点,与 Kennington 的观点一致,认为切矢即速度,也就是流形上曲线参数与点之间的交换率。若读者在了解多种定义后仍坚持第一种观点,则可能未深入思考切矢的定义动机,或虽有预设动机但未验证该动机是否可通过其他定义方式实现。笔者认为,只要深入思考上述问题,便不会认定单一定义可表征真正的切矢。第三种观点采取折中态度,虽看似合理,但无法解决"切矢定义的最原始动机是什么"这一问题。该观点仅能声明定义间的等价性,而这种等价性是在切矢定义已存在前提下的"后判断",无法作为切矢定义构造的先验依据------当尚未构造任何切矢定义时,"切矢是所有定义的综合"无法为首个定义的构造提供指导;当已构造多种切矢定义时,该表述仅将问题指向"综合"所暗含的神秘主义,模糊并回避了"切矢是什么"这一问题;即便容忍这种神秘主义,仍存在无法判断是否找全所有定义的问题,使得"切矢是所有定义的综合"这一表述缺乏实际意义。
回归上述表格,尽管可从中梳理出十几种不同的切矢定义,但考虑到部分定义间存在直接的衍生关系,切矢的定义类型可归并为三类:微分算子、曲线等价类以及满足特定坐标变换规则的数组。关于微分算子表示法,第 2 节已详细分析其表征速度的原理。对于另外两种定义方式,将在本节后续内容中详细阐述。后续将逐步说明,包括下述两种典型定义在内的所有定义方式,本质上均是对速度矢量的数学化实现。
3.1 切矢的曲线等价类定义
此处参考 Влади́мир И́горевич Арно́льд 所著书籍59中的定义,给出此类切矢的定义方式:
设有两条曲线 γ 1 \gamma_{1} γ1 和 γ 2 \gamma_{2} γ2,且 γ 1 ( 0 ) = γ 2 ( 0 ) = p \gamma_{1}(0)=\gamma_{2}(0)=p γ1(0)=γ2(0)=p,若在某一坐标系 ψ \psi ψ 中有
lim t → 0 ψ ∘ γ 1 ( t ) − ψ ∘ γ 2 ( t ) t = 0 \lim_{t \rightarrow 0}{\frac{\psi\circ\gamma_{1}(t)-\psi\circ\gamma_{2}(t)}{t}}=0 limt→0tψ∘γ1(t)−ψ∘γ2(t)=0,
则称这两条曲线是等价的,该等价关系称为相切 。流形在 p p p 处的切矢,即为曲线在上述意义下的等价类。
上述定义的本质的是:若两条曲线在 γ 1 ( 0 ) = γ 2 ( 0 ) = p \gamma_{1}(0)=\gamma_{2}(0)=p γ1(0)=γ2(0)=p 处的速度相等,即
d d t ψ ∘ γ 1 ( t ) ∣ t = 0 = d d t ψ ∘ γ 2 ( t ) ∣ t = 0 \frac{d}{dt}\psi\circ\gamma_{1}(t)\bigg|{t=0}=\frac{d}{dt}\psi\circ\gamma{2}(t)\bigg|_{t=0} dtdψ∘γ1(t) t=0=dtdψ∘γ2(t) t=0,
等价于
lim t → 0 ψ ∘ γ 1 ( t ) − ψ ∘ γ 1 ( 0 ) t = lim t → 0 ψ ∘ γ 2 ( t ) − ψ ∘ γ 2 ( 0 ) t \lim_{t \rightarrow 0}{\frac{\psi\circ\gamma_{1}(t)-\psi\circ\gamma_{1}(0)}{t}}=\lim_{t \rightarrow 0}{\frac{\psi\circ\gamma_{2}(t)-\psi\circ\gamma_{2}(0)}{t}} limt→0tψ∘γ1(t)−ψ∘γ1(0)=limt→0tψ∘γ2(t)−ψ∘γ2(0),
则这两条曲线相切。将所有具有相同速度的相切曲线归为一类,即可反向表征这些曲线所共有的速度矢量。
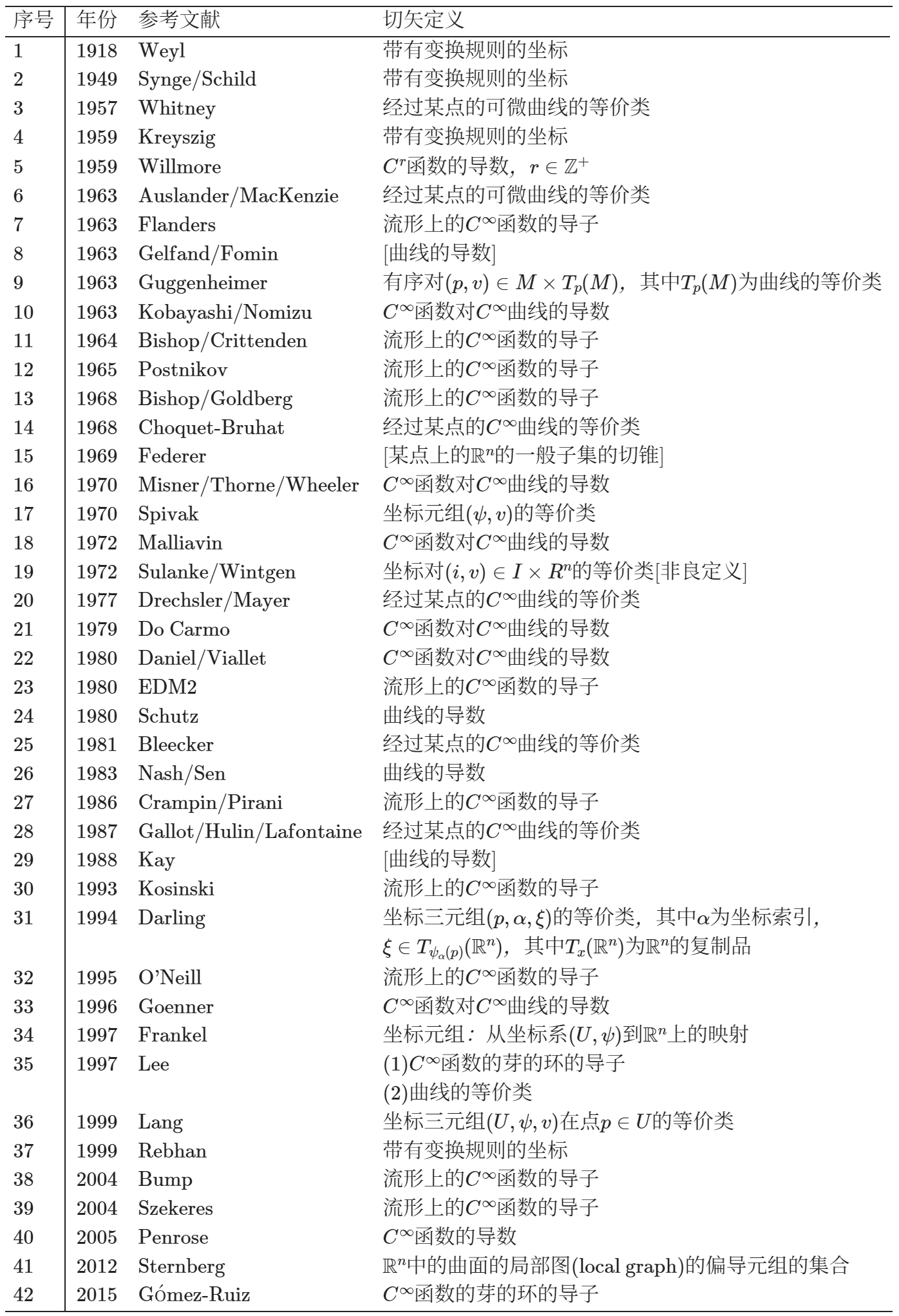
为直观理解曲线等价类,可回顾第 2 节分析微分算子定义思路时展示的图 2。图 2 构造了一个坐标系,使得该坐标系中经过 p p p 的一条坐标线恰好与该切矢相切。显然,该构造过程具有较强的任意性------可构造无数条不同的坐标线与同一个切矢相切(如下图所示)。若将这无数条相切的坐标线视为无数条相切的曲线,便可由微分算子的定义思路转化为曲线等价类的定义思路。
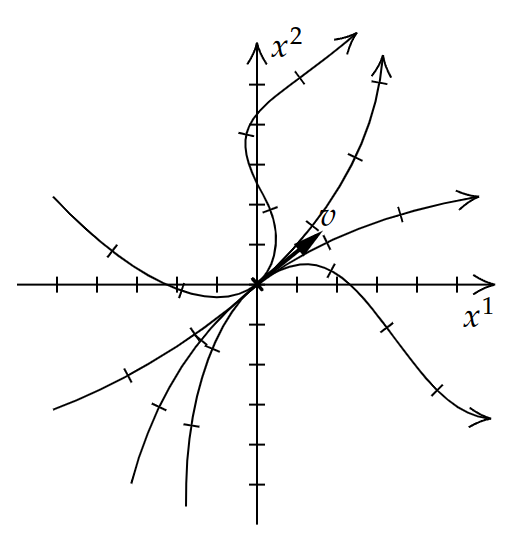
图 3 与切矢相切的曲线有无穷多条
曲线等价类虽具有直观性,但存在较大冗余------单个切矢需用无数条曲线表征,经济性较差。此外,两条曲线是否相切仍需在同一坐标系下进行验证(验证 d d t ψ ∘ γ ( t ) ∣ t = 0 \frac{d}{dt}\psi\circ\gamma(t)|_{t=0} dtdψ∘γ(t)∣t=0 是否相等),因此曲线等价类同样依赖于坐标系。
由此可见,微分算子定义与曲线等价类定义均包含坐标沿曲线的导数。由于坐标沿曲线的导数用于检测曲线经过某点的速度分量,因此两种定义均离不开对速度分量的描述------即均通过依赖于坐标系的方式,间接表征切矢对象。既然坐标系无法避免,不妨直接采用切矢的分量来定义切矢。事实上,许多教材早已采用该思路,且这可能是切矢最早期的定义方式。下述第三种定义类型便采用了该思路。
3.2 切矢的「满足某种坐标变换规则的数组」定义
此类定义通常通过规定切矢分量在坐标系切换时,按照雅可比矩阵(Jacobian)的变换规律进行变换,来定义切矢:
n n n 维流形上一点 p p p 处的切矢(的分量),是在坐标变换时按照如下规则变换的量:
v 2 i = ∑ j = 1 n ∂ ∂ x j ( ψ 2 ∘ ψ 1 − 1 ( x ) ) i ∣ x = ψ 1 ( p ) v 1 j = ∑ j = 1 n J 21 ( p ) j i v 1 j \begin{align*} v^{i}{2}&=\sum{j=1}^{n}{\frac{\partial}{\partial x^{j}}(\psi_{2}\circ\psi_{1}^{-1}(x))^{i}|{x=\psi{1}(p)}v_{1}^{j}}\\ &=\sum_{j=1}^{n}{J_{21}(p)^{i}{j}v{1}^{j}}\\ \end{align*} v2i=j=1∑n∂xj∂(ψ2∘ψ1−1(x))i∣x=ψ1(p)v1j=j=1∑nJ21(p)jiv1j
其中 v 1 j v_{1}^{j} v1j 是切矢在坐标系 ψ 1 \psi_{1} ψ1 下的分量, v 2 i v^{i}{2} v2i 是切矢在坐标系 ψ 2 \psi{2} ψ2 下的分量, J 21 ( p ) j i J_{21}(p)^{i}{j} J21(p)ji 是 p p p 点从坐标系 ψ 1 \psi{1} ψ1 变换到坐标系 ψ 2 \psi_{2} ψ2 的雅可比矩阵。
关于上述定义,需注意以下两点:
-
部分教材18、60(链接解析失败)会将上述定义式中的 ∂ ∂ x j ( ψ 2 ∘ ψ 1 − 1 ( x ) ) i ∣ x = ψ 1 ( p ) \frac{\partial}{\partial x^{j}}(\psi_{2}\circ\psi_{1}^{-1}(x))^{i}|{x=\psi{1}(p)} ∂xj∂(ψ2∘ψ1−1(x))i∣x=ψ1(p) 简写为 ∂ x ′ i ∂ x j \frac{\partial x'^{i}}{\partial x^{j}} ∂xj∂x′i,将 v 1 j v_{1}^{j} v1j 替换为 v j v^{j} vj,将 v 2 i v_{2}^{i} v2i 替换为 v ′ i v'^{i} v′i(用撇 ′ ' ′ 区分变换前后两个坐标系的坐标及切矢分量),并采用爱因斯坦求和约定省略求和号,使上述定义式简写为如下常见形式:
v ′ i = ∂ x ′ i ∂ x j v j v'^{i}=\frac{\partial x'^{i}}{\partial x^{j}}v^{j} v′i=∂xj∂x′ivj,
此类教材通常将其称为"逆变矢量"(contravariant vector)。
-
上述定义为兼顾物理表述,将切矢称为某种"量",从数学角度而言不够严谨。更严谨的表述可参考 Spivak 在其 5 卷微分几何著作33中的做法,将切矢定义为不同坐标系下的分量按照上述变换式关联起来的等价类。
此类定义是最"面向计算"的定义方式,但代价是丧失了所有直观性------无法从定义直接看出其本质为速度。但若将切矢的各个分量视为投影在不同坐标系上的速度分量,则可明确坐标变换时乘以雅可比矩阵的原因。不妨假设 3 维微分流形上有一条经过 p p p 点、带参数 t t t 的曲线,该曲线在 p p p 点自然存在一个切矢,该切矢在带撇与不带撇坐标系下的分量关系由下式给出:
v ′ i = ∂ x ′ i ∂ x j v j v'^{i}=\frac{\partial x'^{i}}{\partial x^{j}}v^{j} v′i=∂xj∂x′ivj
将其展开为矩阵形式:
v ′ 1 v ′ 2 v ′ 3 = ∂ x ′ 1 ∂ x 1 ∂ x ′ 1 ∂ x 2 ∂ x ′ 1 ∂ x 3 ∂ x ′ 2 ∂ x 1 ∂ x ′ 2 ∂ x 2 ∂ x ′ 2 ∂ x 3 ∂ x ′ 3 ∂ x 1 ∂ x ′ 3 ∂ x 2 ∂ x ′ 3 ∂ x 3 v 1 v 2 v 3 \left\\begin{array}{c} v'\^{1} \\\\ v'\^{2} \\\\ v'\^{3} \\end{array}\\right =\left\\begin{array}{c} \\frac{\\partial x'\^{1}}{\\partial x\^{1}} \& \\frac{\\partial x'\^{1}}{\\partial x\^{2}} \& \\frac{\\partial x'\^{1}}{\\partial x\^{3}}\\\\ \\frac{\\partial x'\^{2}}{\\partial x\^{1}} \& \\frac{\\partial x'\^{2}}{\\partial x\^{2}} \& \\frac{\\partial x'\^{2}}{\\partial x\^{3}}\\\\ \\frac{\\partial x'\^{3}}{\\partial x\^{1}} \& \\frac{\\partial x'\^{3}}{\\partial x\^{2}} \& \\frac{\\partial x'\^{3}}{\\partial x\^{3}} \\end{array}\\right \left\\begin{array}{c} v\^{1} \\\\ v\^{2} \\\\ v\^{3} \\end{array}\\right v′1v′2v′3 = ∂x1∂x′1∂x1∂x′2∂x1∂x′3∂x2∂x′1∂x2∂x′2∂x2∂x′3∂x3∂x′1∂x3∂x′2∂x3∂x′3 v1v2v3
将速度分量的计算式 v i = d x i d t v^{i}=\frac{dx^{i}}{dt} vi=dtdxi、 v ′ i = d x ′ i d t v'^{i}=\frac{dx'^{i}}{dt} v′i=dtdx′i 代入,可得:
d x ′ 1 d t d x ′ 2 d t d x ′ 3 d t = ∂ x ′ 1 ∂ x 1 ∂ x ′ 1 ∂ x 2 ∂ x ′ 1 ∂ x 3 ∂ x ′ 2 ∂ x 1 ∂ x ′ 2 ∂ x 2 ∂ x ′ 2 ∂ x 3 ∂ x ′ 3 ∂ x 1 ∂ x ′ 3 ∂ x 2 ∂ x ′ 3 ∂ x 3 d x 1 d t d x 2 d t d x 3 d t = ∂ x ′ 1 ∂ x 1 ⋅ d x 1 d t + ∂ x ′ 1 ∂ x 2 ⋅ d x 2 d t + ∂ x ′ 1 ∂ x 3 ⋅ d x 3 d t ∂ x ′ 2 ∂ x 1 ⋅ d x 1 d t + ∂ x ′ 2 ∂ x 2 ⋅ d x 2 d t + ∂ x ′ 2 ∂ x 3 ⋅ d x 3 d t ∂ x ′ 3 ∂ x 1 ⋅ d x 1 d t + ∂ x ′ 3 ∂ x 2 ⋅ d x 2 d t + ∂ x ′ 3 ∂ x 3 ⋅ d x 3 d t \begin{align*}\left\\begin{array}{c} \\frac{dx'\^{1}}{dt} \\\\ \\frac{dx'\^{2}}{dt} \\\\ \\frac{dx'\^{3}}{dt} \\end{array}\\right &=\left\\begin{array}{c} \\frac{\\partial x'\^{1}}{\\partial x\^{1}} \& \\frac{\\partial x'\^{1}}{\\partial x\^{2}} \& \\frac{\\partial x'\^{1}}{\\partial x\^{3}}\\\\ \\frac{\\partial x'\^{2}}{\\partial x\^{1}} \& \\frac{\\partial x'\^{2}}{\\partial x\^{2}} \& \\frac{\\partial x'\^{2}}{\\partial x\^{3}}\\\\ \\frac{\\partial x'\^{3}}{\\partial x\^{1}} \& \\frac{\\partial x'\^{3}}{\\partial x\^{2}} \& \\frac{\\partial x'\^{3}}{\\partial x\^{3}} \\end{array}\\right \left\\begin{array}{c} \\frac{dx\^{1}}{dt} \\\\ \\frac{dx\^{2}}{dt} \\\\ \\frac{dx\^{3}}{dt} \\end{array}\\right\\ &=\left\\begin{array}{c} \\frac{\\partial x'\^{1}}{\\partial x\^{1}}\\cdot\\frac{dx\^{1}}{dt} + \\frac{\\partial x'\^{1}}{\\partial x\^{2}}\\cdot\\frac{dx\^{2}}{dt} + \\frac{\\partial x'\^{1}}{\\partial x\^{3}}\\cdot\\frac{dx\^{3}}{dt}\\\\ \\frac{\\partial x'\^{2}}{\\partial x\^{1}}\\cdot\\frac{dx\^{1}}{dt} + \\frac{\\partial x'\^{2}}{\\partial x\^{2}}\\cdot\\frac{dx\^{2}}{dt} + \\frac{\\partial x'\^{2}}{\\partial x\^{3}}\\cdot\\frac{dx\^{3}}{dt}\\\\ \\frac{\\partial x'\^{3}}{\\partial x\^{1}}\\cdot\\frac{dx\^{1}}{dt} + \\frac{\\partial x'\^{3}}{\\partial x\^{2}}\\cdot\\frac{dx\^{2}}{dt} + \\frac{\\partial x'\^{3}}{\\partial x\^{3}}\\cdot\\frac{dx\^{3}}{dt} \\end{array}\\right \end{align*} dtdx′1dtdx′2dtdx′3 = ∂x1∂x′1∂x1∂x′2∂x1∂x′3∂x2∂x′1∂x2∂x′2∂x2∂x′3∂x3∂x′1∂x3∂x′2∂x3∂x′3 dtdx1dtdx2dtdx3 = ∂x1∂x′1⋅dtdx1+∂x2∂x′1⋅dtdx2+∂x3∂x′1⋅dtdx3∂x1∂x′2⋅dtdx1+∂x2∂x′2⋅dtdx2+∂x3∂x′2⋅dtdx3∂x1∂x′3⋅dtdx1+∂x2∂x′3⋅dtdx2+∂x3∂x′3⋅dtdx3
即:
{ d x ′ 1 d t = ∂ x ′ 1 ∂ x 1 ⋅ d x 1 d t + ∂ x ′ 1 ∂ x 2 ⋅ d x 2 d t + ∂ x ′ 1 ∂ x 3 ⋅ d x 3 d t d x ′ 2 d t = ∂ x ′ 2 ∂ x 1 ⋅ d x 1 d t + ∂ x ′ 2 ∂ x 2 ⋅ d x 2 d t + ∂ x ′ 2 ∂ x 3 ⋅ d x 3 d t d x ′ 3 d t = ∂ x ′ 3 ∂ x 1 ⋅ d x 1 d t + ∂ x ′ 3 ∂ x 2 ⋅ d x 2 d t + ∂ x ′ 3 ∂ x 3 ⋅ d x 3 d t \left\{\begin{align*}\frac{dx'^{1}}{dt}=\frac{\partial x'^{1}}{\partial x^{1}}\cdot\frac{dx^{1}}{dt} + \frac{\partial x'^{1}}{\partial x^{2}}\cdot\frac{dx^{2}}{dt} + \frac{\partial x'^{1}}{\partial x^{3}}\cdot\frac{dx^{3}}{dt}\\ \frac{dx'^{2}}{dt}=\frac{\partial x'^{2}}{\partial x^{1}}\cdot\frac{dx^{1}}{dt} + \frac{\partial x'^{2}}{\partial x^{2}}\cdot\frac{dx^{2}}{dt} + \frac{\partial x'^{2}}{\partial x^{3}}\cdot\frac{dx^{3}}{dt}\\ \frac{dx'^{3}}{dt}=\frac{\partial x'^{3}}{\partial x^{1}}\cdot\frac{dx^{1}}{dt} + \frac{\partial x'^{3}}{\partial x^{2}}\cdot\frac{dx^{2}}{dt} + \frac{\partial x'^{3}}{\partial x^{3}}\cdot\frac{dx^{3}}{dt} \end{align*}\right. ⎩ ⎨ ⎧dtdx′1=∂x1∂x′1⋅dtdx1+∂x2∂x′1⋅dtdx2+∂x3∂x′1⋅dtdx3dtdx′2=∂x1∂x′2⋅dtdx1+∂x2∂x′2⋅dtdx2+∂x3∂x′2⋅dtdx3dtdx′3=∂x1∂x′3⋅dtdx1+∂x2∂x′3⋅dtdx2+∂x3∂x′3⋅dtdx3
上式等号左边的物理意义为:单位参数 t t t 可转换为多少单位的 x ′ i x'^{i} x′i;等号右边的物理意义为:单位参数 t t t 可转换的 x ′ i x'^{i} x′i 数量( d x ′ i d t \frac{dx'^{i}}{dt} dtdx′i),等于单位 t t t 可转换的 x j x^{j} xj 数量( d x j d t \frac{dx^{j}}{dt} dtdxj),分别乘以单位 x j x^{j} xj 可转换的 x ′ i x'^{i} x′i 数量( ∂ x ′ i ∂ x j \frac{\partial x'^{i}}{\partial x^{j}} ∂xj∂x′i)之和,即 d x ′ i d t = ∂ x ′ i ∂ x j d x j d t \frac{dx'^{i}}{dt}=\frac{\partial x'^{i}}{\partial x^{j}}\frac{dx^{j}}{dt} dtdx′i=∂xj∂x′idtdxj,这本质上是多元复合函数求导的链式法则。明确该意义后,乘以雅可比矩阵的原因便清晰了:雅可比矩阵包含了坐标系变换过程中,坐标 x j x^{j} xj 与 x ′ i x'^{i} x′i 之间的所有交换率信息。因此,在已知 t t t 与 x j x^{j} xj 的交换率时,需借助 x j x^{j} xj 与 x ′ i x'^{i} x′i 之间的交换率(即雅可比矩阵所包含的信息),通过" t t t 转换为 x j x^{j} xj、再由 x j x^{j} xj 转换为 x ′ i x'^{i} x′i"的方式,计算 t t t 与 x ′ i x'^{i} x′i 的交换率。这类似于已知 1 英镑可兑换 1.3 美元、1 美元可兑换 7 元人民币,通过乘法可计算出 1 英镑可兑换 9.1 元人民币(注:此处汇率为举例假设,非真实汇率)。
4. 作为一种"数学之外"的事物,切矢需要通过坐标系来"数学化"
本文已多次强调,切矢是点在曲线上运动的速度,是曲线参数与流形上的点之间的交换率。鉴于流形上的点本身是一个未被严格定义的"数学外之物"(反思可知,我们仅通过坐标表示点,从未严格定义点这一概念),因此切矢本质上也属于"数学外之物"。要对切矢这一"数学外之物"进行数学化,需先将流形上的点数学化,即通过坐标表示点,从而将"曲线参数与流形上的点之间的交换率"转换为"曲线参数与坐标之间的交换率",而后者正是常见的求导过程。借助坐标对曲线参数的导数,切矢最终得以表示为数学上良定义的对象。下图(摘自11)清晰展现了这一数学化过程:
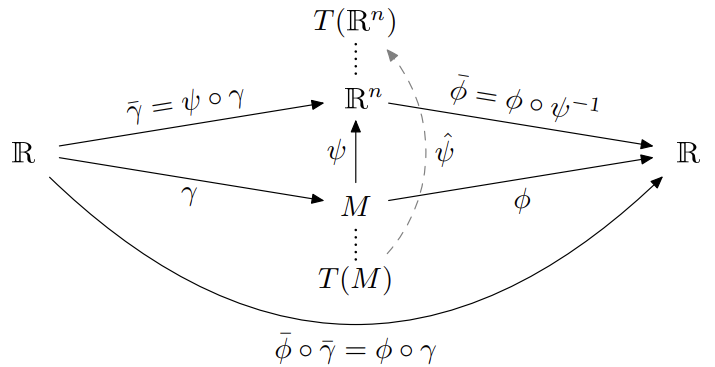
图 4 切矢定义中所涉及到的概念集合之间的映射关系
在上图中,曲线 γ \gamma γ 将 R \mathbb{R} R 中的实数映射为流形 M M M 上的点,而函数 ϕ \phi ϕ 则将流形 M M M 上的点映射为 R \mathbb{R} R 中的实数。可以看出,尽管从 R \mathbb{R} R 到 M M M 的交换率 ∂ γ ( t ) / ∂ t \partial \gamma(t)/\partial t ∂γ(t)/∂t 在数学上无法得到良定义,但通过坐标系 ψ \psi ψ 将 M M M 上的点转换为 R n \mathbb{R}^n Rn 中由 n n n 个实数组成的数组,再计算实数与实数之间的交换率 ∂ γ ‾ ( t ) / ∂ t \partial \overline{\gamma}(t)/\partial t ∂γ(t)/∂t,便可将问题转化为数学上明确定义的求导问题,且其可导性源于微分流形与生俱来的微分结构。正是由于切矢本质上与坐标系无关,但又不得不借助坐标系实现数学化这一客观现实,在定义切矢时,需通过各种曲折的表示方法,"合并"不同坐标系下求导结果的差异性------将同一坐标系下求导结果相同的曲线归为一类,可得到切矢的曲线等价类定义(该定义利用"同一坐标系下求导结果相同的两条曲线,在另一坐标系下求导结果仍相等"的性质,统合不同坐标系下求导结果的差异性);将不同坐标系下对同一条曲线的不同求导结果"合成"为求导运算本身(即导子,具体合成过程见第 2 节),可得到切矢的微分算子定义;将坐标系切换时,按照切矢分量变换规则进行变换的前后两个数组视为同一对象,可得到切矢的「满足某种坐标变换规则的数组」定义。
值得注意的是,当顺着上图中的函数 ϕ \phi ϕ 将流形 M M M 上的点映射回 R \mathbb{R} R 中的实数时,其间产生的交换率即为切矢的对偶矢量(严格来说,是切矢所在切空间的对偶空间中的元素),也称为余切矢(cotangent vector)。若切矢可理解为"曲线的速度",则余切矢可相应理解为"函数的梯度"。多数教材将余切矢表示为 d f df df 的形式,但很少有人将其误视为无穷小量。梁灿彬所著教材中对 d f df df 的理解基本正确,未将其视为无穷小量,但在解释 d f df df 含义的过程中,却将切矢解释为某种无穷小量(见该教材选读 2-3-1):
经典微积分企图把 d f ∣ p df|{p} df∣p 说成 p p p 点的函数值的一个(无限小)增量,但这个增量尚不确定,因为它取决于动点(自变点)从 p p p 出发"沿什么方向走多远"。既然 p p p 点的一个矢量 v v v 反映"从 p p p 出发沿什么方向走多远",给定 v ∈ V p v\in V{p} v∈Vp 便可使 d f ∣ p df|_{p} df∣p 真正"成为"一个实数(增量)。... 物理学家往往对 d f df df 和 Δ f \Delta f Δf 不加区别,喜欢说" d f ∣ p df|_p df∣p 等于 f ( q ) − f ( p ) f(q)-f(p) f(q)−f(p),其中 q q q 是与 p p p 无限邻近的点。"而且随手在纸上画出 p p p, q q q 两点。其实, p p p, q q q 两点一经指定(在图上标出)就不会无限邻近, f ( q ) − f ( p ) f(q)-f(p) f(q)−f(p) 就不是无穷小量,因而就只能是 Δ f \Delta f Δf 而非 d f df df。然而,由于物理上常常允许一定的近似,把足够小的 Δ f \Delta f Δf 近似看作 d f df df 的做法不但允许而且往往相当有用。事实上,设曲线 C ( t ) C(t) C(t) 满足 C ( 0 ) = p C(0)=p C(0)=p, ( ∂ / ∂ t ) ∣ p = v (\partial/\partial t)|_p=v (∂/∂t)∣p=v, q = C ( α ) q=C(\alpha) q=C(α) 且 α \alpha α 足够小,则由式(2-3-7)和(2-2-6')可知 d f ∣ p df|_p df∣p 对 α v \alpha v αv 作用的结果为
d f ∣ p ( α v ) = α v ( f ) = α lim Δ t → 0 1 Δ t { f C ( Δ t ) − f C ( 0 ) } ≅ α 1 α f ( q ) − f ( p ) ≡ f ( q ) − f ( p ) ≡ Δ f \begin{aligned} df|{p}(\alpha v) & = \alpha v(f) \\ & = \alpha \lim{\Delta t \rightarrow 0} \frac{1}{\Delta t} \{ fC(\\Delta t) - fC(0) \} \\ & \cong \alpha \frac{1}{\alpha} f(q) - f(p) \\ & \equiv f(q) - f(p) \\ & \equiv \Delta f \end{aligned} df∣p(αv)=αv(f)=αΔt→0limΔt1{fC(Δt)−fC(0)}≅αα1f(q)−f(p)≡f(q)−f(p)≡Δf
可见 d f ∣ p df|_p df∣p(作用于 α v \alpha v αv 后)果然近似给出 Δ f \Delta f Δf。
上述引文中的省略号之前,该教材认为切矢 v v v 反映"从 p p p 出发沿什么方向走多远",这似乎将切矢视为流形上某种极小的位移矢量(既包含方向,也包含沿该方向移动的距离)。若按此理解,仅需已知 v v v 和 d f df df,便应能计算出 Δ f \Delta f Δf。但省略号之后,该教材却突兀地引入一个足够小的量 α \alpha α,通过 d f ∣ p df|_p df∣p 对 α v \alpha v αv 作用,才近似得到 Δ f \Delta f Δf,这导致叙述前后矛盾。事实上,由上述引文最后的推导过程可知,后者才是正确的------ α v \alpha v αv 才真正反映"从 p p p 出发沿什么方向走多远"。从速度的角度理解切矢 v v v,便可明确乘以 α \alpha α 的原因: v v v 本质上是速度,反映"从 p p p 出发沿什么方向走多快";要得到"从 p p p 出发沿什么方向走多远",需知道运动的"时间",再通过"时间"乘以"速度"得到"距离",而 α \alpha α 便反映了该"时间"(从上式中将 1 Δ t \frac{1}{\Delta t} Δt1 近似为 1 α \frac{1}{\alpha} α1 可明确看出这一点)。因此, α v \alpha v αv 才真正反映"从 p p p 出发沿什么方向走多远"。下图清晰展现了 α \alpha α 对 Δ f \Delta f Δf 增量变化的影响:
图 5 曲线参数的变化引起点的变化,点的变化引起函数值的变化
在上图中,曲线参数从 0 0 0 到 α \alpha α 的变化,引起点从 C ( 0 ) = p C(0)=p C(0)=p 到 C ( α ) = q C(\alpha)=q C(α)=q 的变化;点从 p p p 到 q q q 的变化,又引起函数值从 f ( p ) f(p) f(p) 到 f ( q ) f(q) f(q) 的变化。整个过程涉及两个变化率:前者由切矢衡量,后者由余切矢衡量。当曲线参数的变化量足够小时,其在流形上的变化范围也很小,可认为该局部区域中切矢和余切矢所衡量的变化率近似恒定(即所谓的"局部线性化",详细解释见第 5 节),因此可通过「曲线参数增量×切矢×余切矢」的连续线性作用,近似计算函数值的增量,得到与该教材一致的约等式: Δ f ≅ α v ( f ) \Delta f\cong \alpha v(f) Δf≅αv(f)。将该式重写为 Δ f α ≅ v ( f ) \frac{\Delta f}{\alpha}\cong v(f) αΔf≅v(f),当 α \alpha α 无限趋近于 0 0 0 时,约等号左边变为求导,整个式子变为严格相等,即 d d t ( f ∘ C ( t ) ) = v ( f ) \frac{d}{dt}(f\circ C(t))=v(f) dtd(f∘C(t))=v(f)。因此,该教材中切矢与余切矢相互作用的结果 v ( f ) v(f) v(f),本质上反映的是"端到端"( α \alpha α 到 Δ f \Delta f Δf)的变化率,即实数与实数之间的交换率。中间涉及的两个变化率,需借助坐标系才能单独计算。为清晰看出这一点,换回图 4 中的符号体系,将 C C C 替换为 γ \gamma γ、 f f f 替换为 ϕ \phi ϕ,对 ϕ ∘ γ ( t ) \phi\circ\gamma(t) ϕ∘γ(t) 求导,可得:
d d t ( ϕ ∘ γ ( t ) ) = d d t ( ϕ ∘ ψ − 1 ∘ ψ ∘ γ ( t ) ) = ∑ i = 1 n ∂ ϕ ( ψ − 1 ( x ) ) ∂ x i ∣ x = γ ‾ ( t ) ∂ ψ i ( γ ( t ) ) ∂ t = ∑ i = 1 n ∂ ϕ ˉ ( x ) ∂ x i ∣ x = γ ˉ ( t ) ∂ γ ˉ i ( t ) ∂ t = d d t ( ϕ ˉ ∘ γ ˉ ( t ) ) = ∑ i = 1 n w i v i \begin{align*} \frac{d}{dt}(\phi \circ \gamma(t)) & = \frac{d}{dt}(\phi \circ \psi^{-1} \circ \psi \circ \gamma(t)) \\ & = \sum_{i=1}^{n} \frac{\partial \phi(\psi^{-1}(x))}{\partial x^{i}} \bigg|{x=\overline{\gamma}(t)} \frac{\partial \psi^{i}(\gamma(t))}{\partial t} \\ & = \sum{i=1}^{n} \frac{\partial \bar{\phi}(x)}{\partial x^{i}} \bigg|{x=\bar{\gamma}(t)} \frac{\partial \bar{\gamma}^{i}(t)}{\partial t} \\ & = \frac{d}{dt}(\bar{\phi} \circ \bar{\gamma}(t)) \\ & = \sum{i=1}^{n} w_{i} v^{i} \\ \end{align*} dtd(ϕ∘γ(t))=dtd(ϕ∘ψ−1∘ψ∘γ(t))=i=1∑n∂xi∂ϕ(ψ−1(x)) x=γ(t)∂t∂ψi(γ(t))=i=1∑n∂xi∂ϕˉ(x) x=γˉ(t)∂t∂γˉi(t)=dtd(ϕˉ∘γˉ(t))=i=1∑nwivi
其中 w i = ∂ ϕ ˉ ( x ) / ∂ x i ∣ x = γ ˉ ( t ) w_{i}=\partial\bar{\phi}(x)/\partial x^{i}|_{x=\bar{\gamma}(t)} wi=∂ϕˉ(x)/∂xi∣x=γˉ(t) 为余切矢在坐标系 ψ \psi ψ 下的分量, v i = ∂ γ ˉ i ( t ) / ∂ t v^{i}=\partial\bar{\gamma}^{i}(t)/\partial t vi=∂γˉi(t)/∂t 为切矢在坐标系 ψ \psi ψ 下的分量。由此可见,尽管无法直接对 ϕ \phi ϕ 和 γ \gamma γ 求导,但通过引入坐标系 ψ \psi ψ 作为"中介",将其转化为 ϕ ˉ \bar{\phi} ϕˉ 和 γ ˉ \bar{\gamma} γˉ,便可完成求导过程,且不影响两者合成后的计算结果,因为 ϕ ∘ γ = ϕ ˉ ∘ γ ˉ \phi\circ\gamma=\bar{\phi}\circ\bar{\gamma} ϕ∘γ=ϕˉ∘γˉ。因此,无论是切矢还是余切矢,均是点与实数之间相互转换时产生的抽象交换率(前者将实数转换为点,后者将点转换为实数)。这种抽象交换率无法直接定义,必须引入坐标系作为"代理"才能得以表示。但由于切矢本质上与坐标系无关,而坐标系表示会随坐标系的变化而变化,因此为将这些变化"合并"到同一个切矢中,不同学者采用了不同的"合并"方式(详见本节第二段),从而形成了如今多样的切矢定义。
5. 请把切矢放到"时空"中去理解
要彻底理解切矢的本质,需消除一种常见的错误认知:认为切矢应"伸展"在 n n n 维流形之中。这种认知可能源于"速度矢量"通常被画在空间中的习惯画法。事实上,切矢应被置于"时空"中理解,即切矢并非寄宿在流形内部的"空间实体",而是包含时间维度的"时空实体"。因此,严格来说,图 2 与图 3 中将切矢用箭头画在空间中的方式并不严谨,易使人误以为切矢是箭头末端点与起始点的空间差值。
若在 n n n 维流形(空间)的基础上增加一个"时间"维度,使空间维数提升至 n + 1 n+1 n+1 维,新维度的坐标轴刻度用 t t t 标示,令"时空"坐标 ( x 1 , x 2 , . . . , x n , t ) (x^{1}, x^{2}, ..., x^{n}, t) (x1,x2,...,xn,t) 构成 n + 1 n+1 n+1 维笛卡尔坐标空间 R n + 1 \mathbb{R}^{n+1} Rn+1,再将参数曲线方程 x i = ψ i ∘ γ ( t ) x^{i}=\psi^{i}\circ\gamma(t) xi=ψi∘γ(t) 绘制于该 n + 1 n+1 n+1 维时空中,则切矢可表示为该时空中与曲线相切的一条切线(如下图所示)。
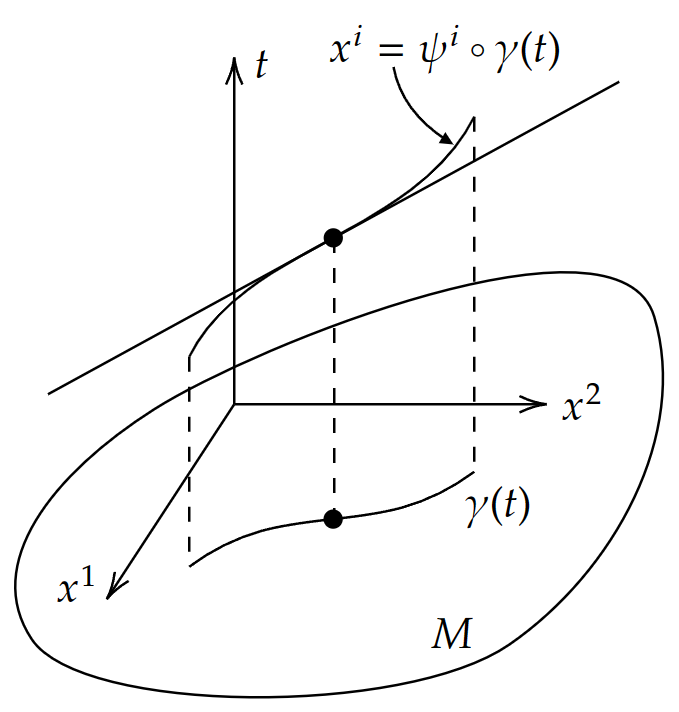
图 6 切矢可表示成时空中的切线
关于上图,需注意以下几点:
- 图中切线沿各个空间坐标方向上的斜率( Δ x i Δ t \frac{\Delta x^{i}}{\Delta t} ΔtΔxi),代表曲线在当前局部坐标系下的速度分量。
- 图中所示切线高度依赖于坐标系,在不同坐标系中,与同一条曲线相切的切线通常不同。这是因为与同一条曲线相切的直线有无数条,此处所指的切线是最"直"的一条,而切线的"直"由坐标方程决定,因此在某一坐标系下为"直"的线,在另一坐标系下可能变为"曲"线。在未附加度量结构和联络结构的情况下,不存在真正的直线(测地线)。因此,在曲线某点附近的有限小区域内,用切线近似替代曲线以进行"局部线性化",其结果和误差会随坐标系的变化而变化,且这种差异性会随着线性化区域的缩小而无限趋近于 0。
- William L. Burke 在其著作61(链接解析失败)中,将切矢的相切性(tangency)分为两部分:方向上的一致性(称为 contact)与速率上的一致性。当按照传统方式将切矢画成空间中的箭头时,即便不将其视为空间差值而视为速度,也往往仅关注其方向与运动轨迹的"切",而忽略大小与运动快慢的"切",即速率上的一致性常被忽视。因此,需强调将切矢如图 6 所示画成时空中的切线,这种画法更易让人注意到速度大小方面的相切性,且该相切性体现在切线的斜率之中。
- 将切线直接画在流形的当前局部坐标系中(而非时空中)并非不可,但为强调速率上的一致性,需将切线参数标示为刻度尺形式。刻度尺的疏密程度可用于体现切矢所代表的速度大小,这种表现形式可直观展现"局部线性化"的坐标系依赖性。如下图所示,同一个切矢在不同坐标系中通常表示为不同的切线:在坐标系 ψ 1 \psi_{1} ψ1 中表示为 γ 1 \gamma_{1} γ1,在坐标系 ψ 2 \psi_{2} ψ2 中表示为 γ 2 \gamma_{2} γ2。若用一条与物体速度相切的"直线"近似物体在小范围内的运动轨迹,则由于不同坐标系中的切线不同,在不同坐标系中描绘出的物体过去与未来轨迹走向也会不同(因此图 5 中与 v v v 对应的曲线并非唯一,沿 v v v "匀速直线"延伸的轨迹走向会随坐标系的变化而变化)。
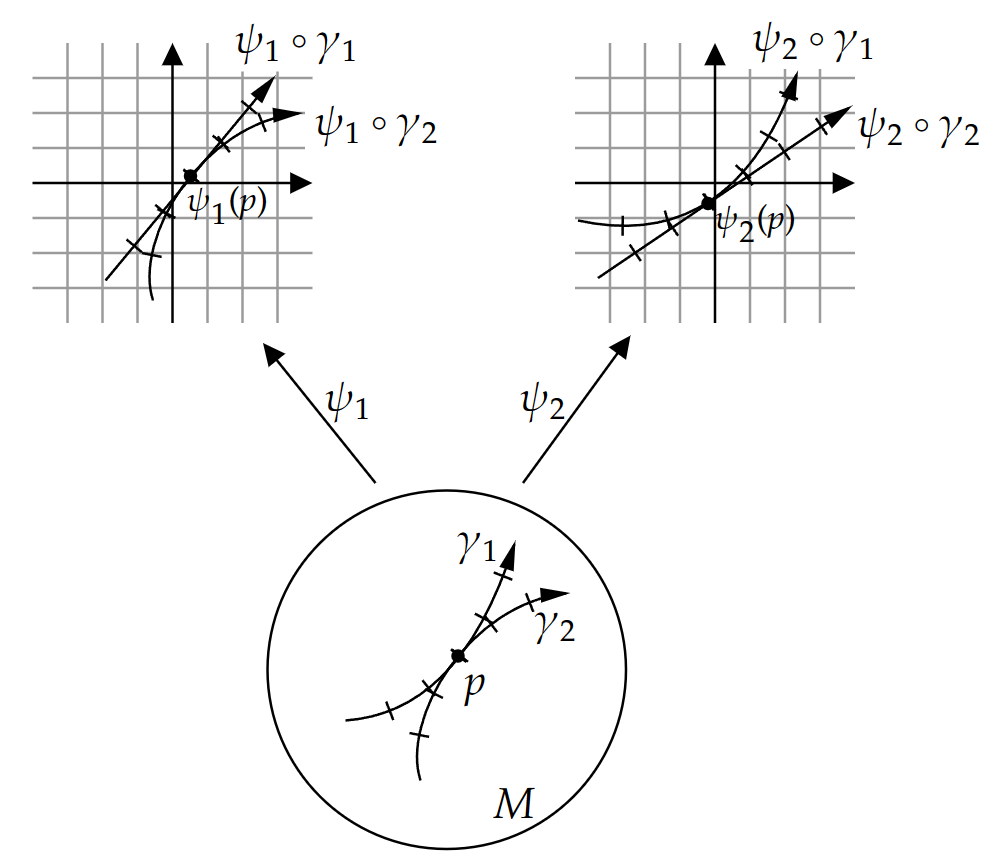
图 7 同一个切矢在不同的坐标系中表示成不同的切线
同理,若将 n n n 维流形提升一个维度,新维度的坐标刻度用 z z z 标示,令包含 z z z 坐标分量的坐标 ( x 1 , x 2 , . . . , x n , z ) (x^{1}, x^{2}, ..., x^{n}, z) (x1,x2,...,xn,z) 构成 n + 1 n+1 n+1 维笛卡尔坐标空间 R n + 1 \mathbb{R}^{n+1} Rn+1,再将函数 f f f 表示为该 n + 1 n+1 n+1 维空间中,曲面方程为 z = f ∘ ψ − 1 ( x ) z=f\circ\psi^{-1}(x) z=f∘ψ−1(x) 的 n n n 维超曲面,则 p p p 点的余切矢 d f df df 可表示为该 n n n 维超曲面在 ψ ( p ) \psi(p) ψ(p) 处的超切平面(如下图所示)。
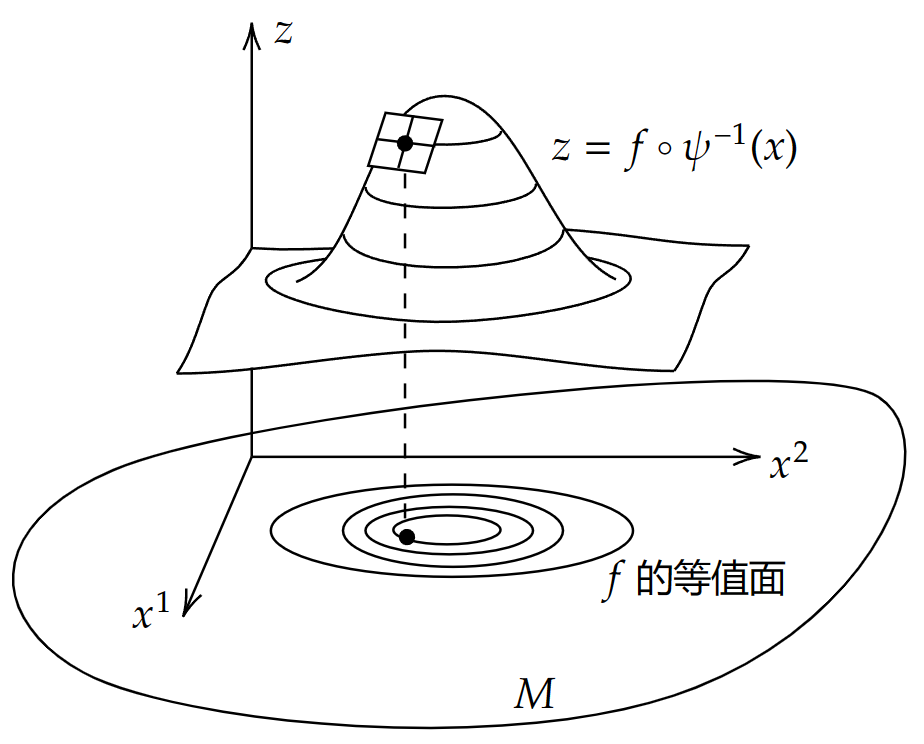
图 8 余切矢可表示成超曲面的切平面
关于上图,需注意以下几点:
- 图中超切平面沿各个坐标线方向上的"坡度"( Δ z Δ x i \frac{\Delta z}{\Delta x^{i}} ΔxiΔz),即为函数在当前局部坐标系下的梯度分量。
- 图中所示切平面同样依赖于坐标系,因此通过切平面近似曲面进行"局部线性化",其结果在不同坐标系中也会存在差异,原因与用切线近似曲线一致,此处不再赘述。
陈省身在《微分几何讲义》62中写道:
正则的曲线和曲面在每一点分别有切线和切平面的概念。同样,在拓扑流形上给定一个微分结构之后,在每一点的附近可以用线性空间来"近似",确切地说,可以引进切空间和余切空间等概念。
上述引文表明,切线与切平面分别是切矢与余切矢的古典对应物,是切矢和余切矢定义的思想来源。但陈省身未明确说明的是,现代微分几何中用于"近似"的"线性空间",本质上仍是用切线与超切平面"局部近似"曲线与超曲面,且这种"近似"依赖于坐标系。
因此,定义切矢和余切矢的意义,可视为"以直代曲"思想的延伸,也可称为"局部线性化"。但需注意,若谈论"局部线性化"时,仅提及抽象的线性空间,而未联想到斜率、坡度等类似概念(如切线和切平面),则未真正理解局部线性化的内涵。需明确:"局部线性化"并不等同于"存在一个线性空间"。
- 微分几何 | 切向量:线性元素还是速度?(3)-CSDN博客
https://blog.csdn.net/u013669912/article/details/159827756
参考
- 如何理解切空间里的向量可以看成微分算子? - 知乎 https://www.zhihu.com/question/25371933
- 微分流形中的切矢量定义应该怎么理解? - 知乎 https://www.zhihu.com/question/64653924
- 如何理解微分几何中的切空间? - 知乎 https://www.zhihu.com/question/269612749
- 微分几何中为什么要用线性函数的观点来看切向量? - 知乎 https://www.zhihu.com/question/519755962
- 微分流形的切向量定义中(见定义1.3),为什么需要满足条件2莱布尼兹法则? - 知乎 https://www.zhihu.com/question/313697206
- 微分几何里面为什么切空间的基要用偏导数表示? - 知乎 https://www.zhihu.com/question/407606569
- 切矢量的很多种定义之间为什么是等价的,该怎么理解切矢量? - 知乎 https://www.zhihu.com/question/500208709
- 想问一下,怎么直观理解微分几何中切向量几种定义之间的联系? - 知乎 https://www.zhihu.com/question/590183559
- 值得一提的是,这里所说的自然同构(canonical isomophism)目前尚不存在任何数学意义上的严格定义。人们对自然同构的判断始终摆脱不了对某种"自然性"的主观直觉的依赖。注意,范畴论中定义的自然同构(natural isomophism)实际上并未触及自然同构(canonical isomophism)的真正工作方式。也就是说,范畴论试图严格化自然同构的努力实际上并没有达到大家所期望的成效。
- 数学上的形式主义和结构主义只关心形式或结构已经存在之后的事情,至于构建起这些形式或结构的各种概念的意义是什么它们并不关心。形式主义和结构主义数学总是对数学概念体系何以能够被应用在现实中持有不可思议的冷漠态度。
- Alan U. Kennington, Differential geometry reconstructed: A unified systematic framework http://www.geometry.org/tex/conc/dgstats.php
- item 2011080401: Differential Geometry Reconstructed book work-in-progress diary - item 2011080401
http://www.geometry.org/tex/conc/diary.php?item=2011080401 - 梁灿彬,周彬. 微分几何入门与广义相对论(上册 第二版). 科学出版社,2006.
- Robert M. Wald. General Relativity. University of Chicago Press, 1984.
- 事实上,这不是坐标系,而是一个chart,只有指明了坐标域的情况下它才成为坐标系。但此处为了行文方便也将它称为坐标系,毕竟坐标域对本文目的的影响并不是那么重要。
- 事实上,只需要在点附近的一个很小的邻域内相等即可,而不需要两者处处相等,但这不影响最终结论的形成,毕竟切矢本身就是一个局部概念。
- Hermann Klaus Hugo Weyl. Raum, Zeit, Materie: Vorlesungen über allgemeine Relativitätstheorie, 7th ed. Springer, Berlin, 1918, 1923, 1970, 1988.
- John Lighton Synge, Alfred Schild. Tensor calculus. Dover Publications, New York, 1949, 1969, 1978.
- Hassler Whitney. Geometric integration theory. Dover Publications, Mineola, New York, 1957, 2005.
- Erwin Kreyszig. Differential geometry. Dover Publications, New York, 1959, 1963, 1991.
- Thomas James Willmore. Introduction to differential geometry. Dover Publications, Mineola, New York, 1959, 1964, 2012.
- Louis Auslander, Robert Earl MacKenzie. Introduction to differentiable manifolds. Dover Publications, Mineola, New York, 1963, 1977, 1991, 2009.
- Harley Flanders. Differential forms with applications to the physical sciences. Dover Publications, New York, 1963, 1989.
- Israel Moiseevich Gelfand, Sergei Vasilyevich Fomin. Calculus of variations. Dover Publications, Mineola, New York, 1963, 1991, 2000.
- Heinrich Walter Guggenheimer. Differential geometry. Dover Publications, Mineola, New York, 1963, 1977.
- Shoshichi Kobayashi, Katsumi Nomizu. Foundations of differential geometry, Volume I. Wiley Interscience, New York, 1963.
- Richard Lawrence Bishop, Richard J. Crittenden. Geometry of manifolds. Academic Press, New York, 1964.
- Mikhail Mikhailovich Postnikov. The variational theory of geodesics. Dover Publications, Mineola, New York, 1965, 1967, 1983, 2003.
- Richard Lawrence Bishop, Samuel Irving Goldberg. Tensor analysis on manifolds. Dover Publications, New York, 1968, 1980.
- Yvonne Suzanne Marie-Louise Choquet-Bruhat. Géométrie différentielle et systèmes extérieurs. Dunod, Paris, 1968.
- Herbert Federer. Geometric measure theory. Springer, Berlin, 1969.
- Charles William Misner, Kip Stephen Thorne, John Archibald Wheeler. Gravitation. W. H. Freeman, New York, 1970.
- Michael David Spivak. A comprehensive introduction to differential geometry, Volumes 1--5, 3rd ed. Publish or Perish, Berkeley, 1970, 1979, 1999.
- Paul Malliavin. Géométrie différentielle intrinsèque. Hermann, Paris, 1972.
- Rolf Sulanke, Peter Wintgen. Differentialgeometrie und Faserbündel. Birkhäuser Verlag, Basel, 1972.
- Wolfgang Drechsler, Meinhard Edwin Mayer. Fiber bundle techniques in gauge theories. Springer-Verlag, Heidleberg, 1977.
- Manfredo Perdigão do Carmo. Riemannian geometry. Birkhäuser, Boston, 1992.
- M. Daniel, Claude-Michel Viallet. The geometrical setting of gauge theories of the Yang-Mills type. Reviews of Modern Physics, 1980, 52: 175--197.
- Mathematical Society of Japan. Encyclopedic dictionary of mathematics, 2nd ed. MIT Press, Cambridge MA, 1993.
- Bernard Frederick Schutz. Geometrical methods of mathematical physics. Cambridge University Press, Cambridge, 1980, 1999.
- David Dudley Bleecker. Gauge theory and variational principles. Dover Publications, Mineola, New York, 1981, 2005.
- Charles Nash, Siddhartha Sen. Topology and geometry for physicists. Dover Publications, Mineola, New York, 1983, 2011.
- Michael Crampin, Felix Arnold Edward Pirani. Applicable differential geometry. Cambridge U.P., Cambridge, 1986, 1994.
- Sylvestre Gallot, Dominique Hulin, Jacques Lafontaine. Riemannian Geometry, Second ed. Springer, Berlin, 1987, 1990.
- David Clifford Kay. Tensor calculus. Schaum's Outline Series, New York, 1988, 2011.
- Antoni Albert Kosinski. Differential manifolds. Dover Publications, New York, 1993, 2007.
- Richard William Ramsay Darling. Differential forms and connections. Cambridge University Press, Cambridge, 1994, 1999.
- Barrett O'Neill. The geometry of Kerr black holes. Dover Publications, Mineola, New York, 1995, 2014.
- Hubert Goenner. Einführung in die spezielle und allgemeine Relativitätstheorie. Spektrum Akademischer Verlag, Heidelberg, 1996.
- Theodore Thomas Frankel. The geometry of physics, an introduction, First ed. Cambridge University Press, Cambridge, 1997, 1999, 2001.
- John Marshall Lee. Riemannian manifolds: An introduction to curvature. Springer-Verlag, New York, 1997.
- Serge Lang. Fundamentals of differential geometry. Springer, New York, 1999, 2001.
- Eckhard Rebhan. Theoretische Physik 1. Spektrum Akademischer Verlag, Heidleberg, 1999.
- Daniel Bump. Lie groups. Springer, New York, 2004.
- Peter Szekeres. A course in modern mathematical physics: groups, Hilbert space, and differential geometry. Cambridge University Press, Cambridge, 2004.
- Roger Penrose. The road to reality: A complete guide to the laws of the Universe. Vintage Books, London, 2005.
- Shlomo Zvi Sternberg. Curvature in mathematics and physics. Dover Publications, Mineola, New York, 2012.
- Francisco Gómez Ruiz. Geometría diferencial y geometría de Riemann. Universidad de Málaga, Spain, 2015.
- В.И.阿诺尔德. 经典力学的数学方法(第4版). 齐民友 译. 高等教育出版社,2006.
- 赵峥,刘文彪. 广义相对论基础. 清华大学出版社,2010.
- William L. Burke. Applied Differential Geometry. Cambridge University Press, 1985.
- 陈省身,陈维桓. 微分几何讲义(第二版). 北京大学出版社,2001.
- Alba Papa-Grimaldi, Why Mathematical Solutions of Zeno's Paradoxes Miss The Point: Zeno's One and Many Relation and Parmenides' Prohibition, Review of Metaphysics 50 (2):299 - 314, 1996
- 黄克智,薛明德,陆明万. 张量分析(第二版). 清华大学出版社,2003.
- Manifold Tangent Vector -- from Wolfram MathWorld
https://mathworld.wolfram.com/ManifoldTangentVector.html