最近实验室在开展关于机器人的项目于是开此系列博客,包括机器人控制,立体摄像机视觉捕捉等,本文主要讲ZED MINI 立体摄像机的基本配置。
1.确认自己电脑的cuda版本
cpp
nvidia-smi # 查看显卡驱动信息
nvcc -V # 查看CUDA的信息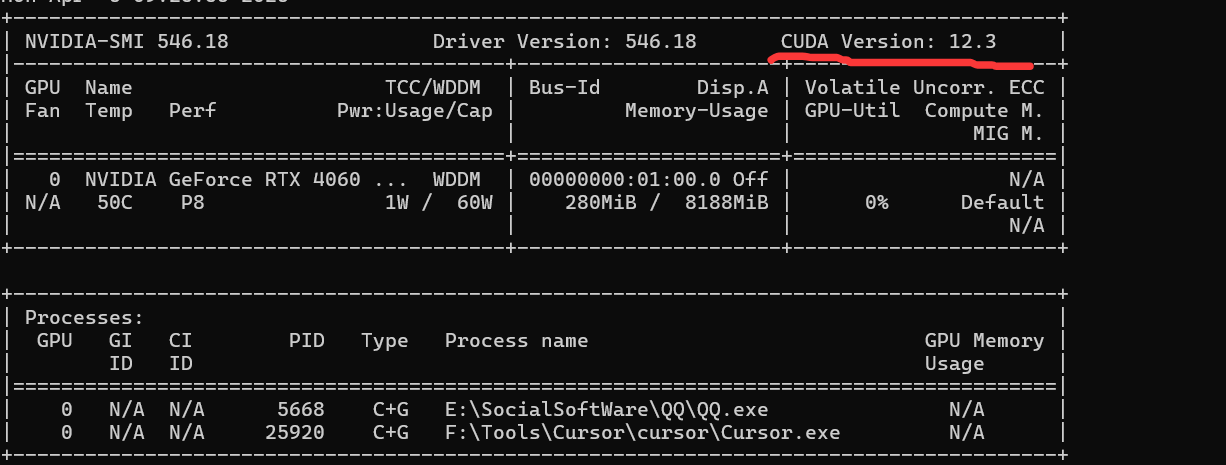
2.ZED SDK
下载与自己电脑显卡相对应的SDK, 我电脑是12.3 就下SDK 12.0
https://www.stereolabs.com/developers/release
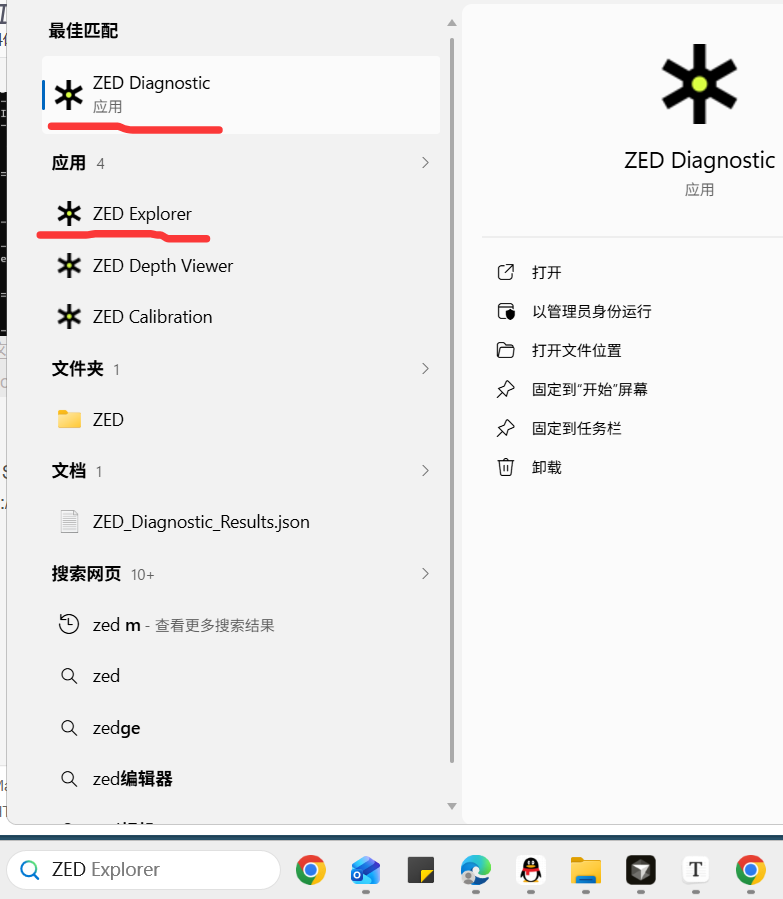
下载好ZED SDK后在setting搜索 ZED会有如下的文件,
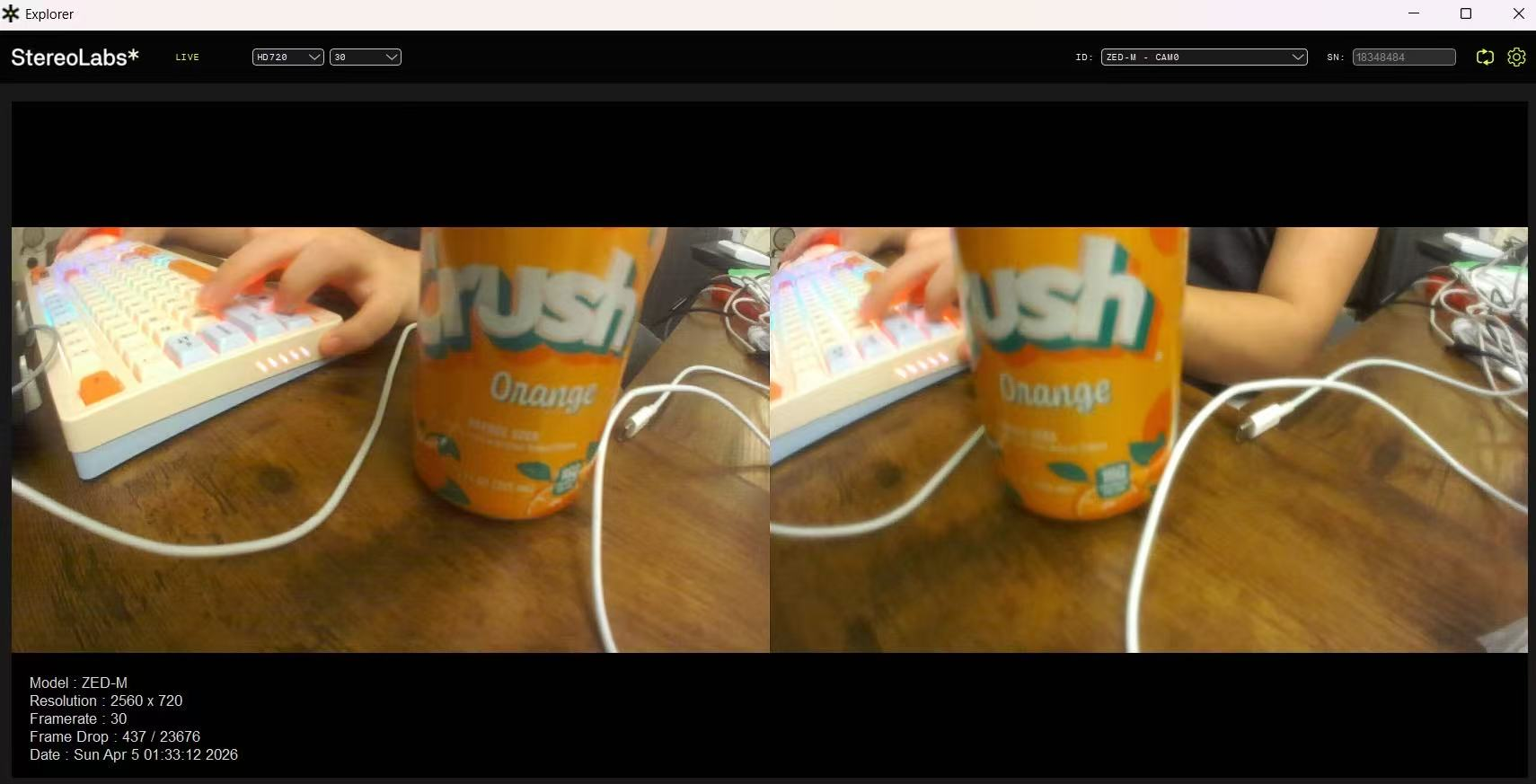
ZED Diagnostic用来检测电脑和ZED连接是否正常,如果Diagnostic全部通过就可以打开ZED Exploer
正常运行的结果如下: