本文的内容主要参考论文TWIST2, 来动手做一个Neck(脖子)机器人,论文链接放在文末。
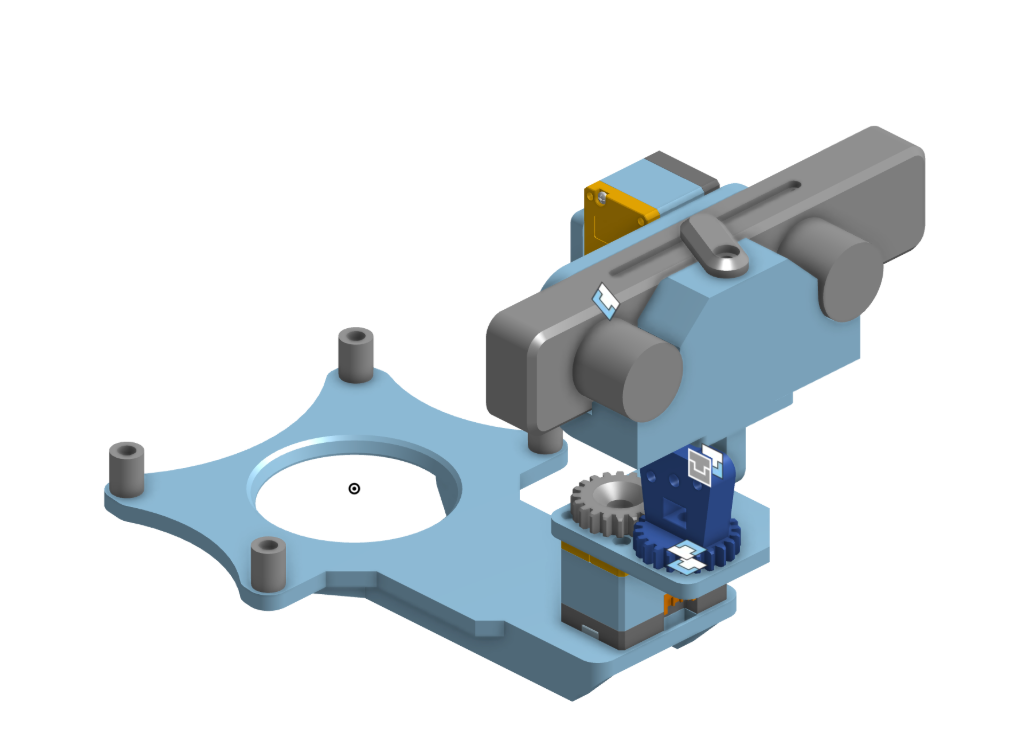
机器人模型大致如下:
1:零件打印
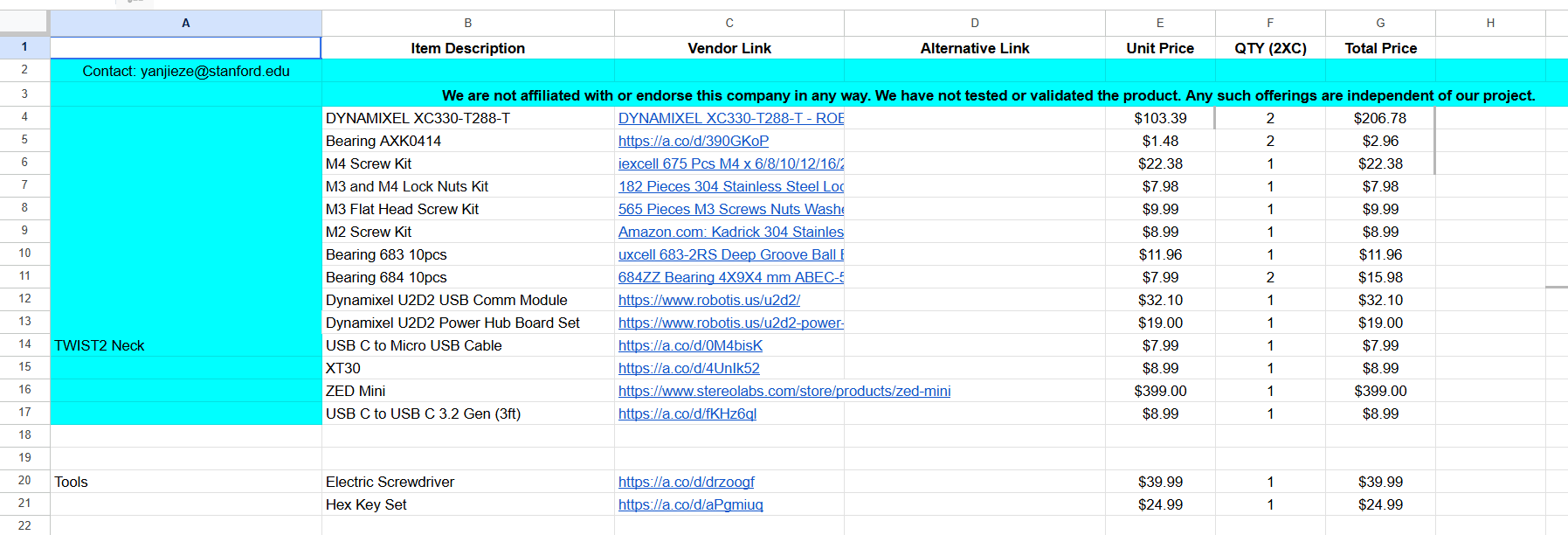
论文团队提供了该机器人项目的材料清单,
关于ZED MINI立体摄像头的配置在上一篇文章已经提过,可以参考
https://blog.csdn.net/qq_40514113/article/details/159896039?spm=1001.2014.3001.5501
其中一部分零件可以使用3D PLT打印机进行打印得到。
本文的机器人使用双舵机控制,因此需要2个DYNAMIXEL XC330-T288-T.
2:材料组装

https://www.youtube.com/watch?v=dkV7V7WJj6E\&feature=youtu.be
成果图:

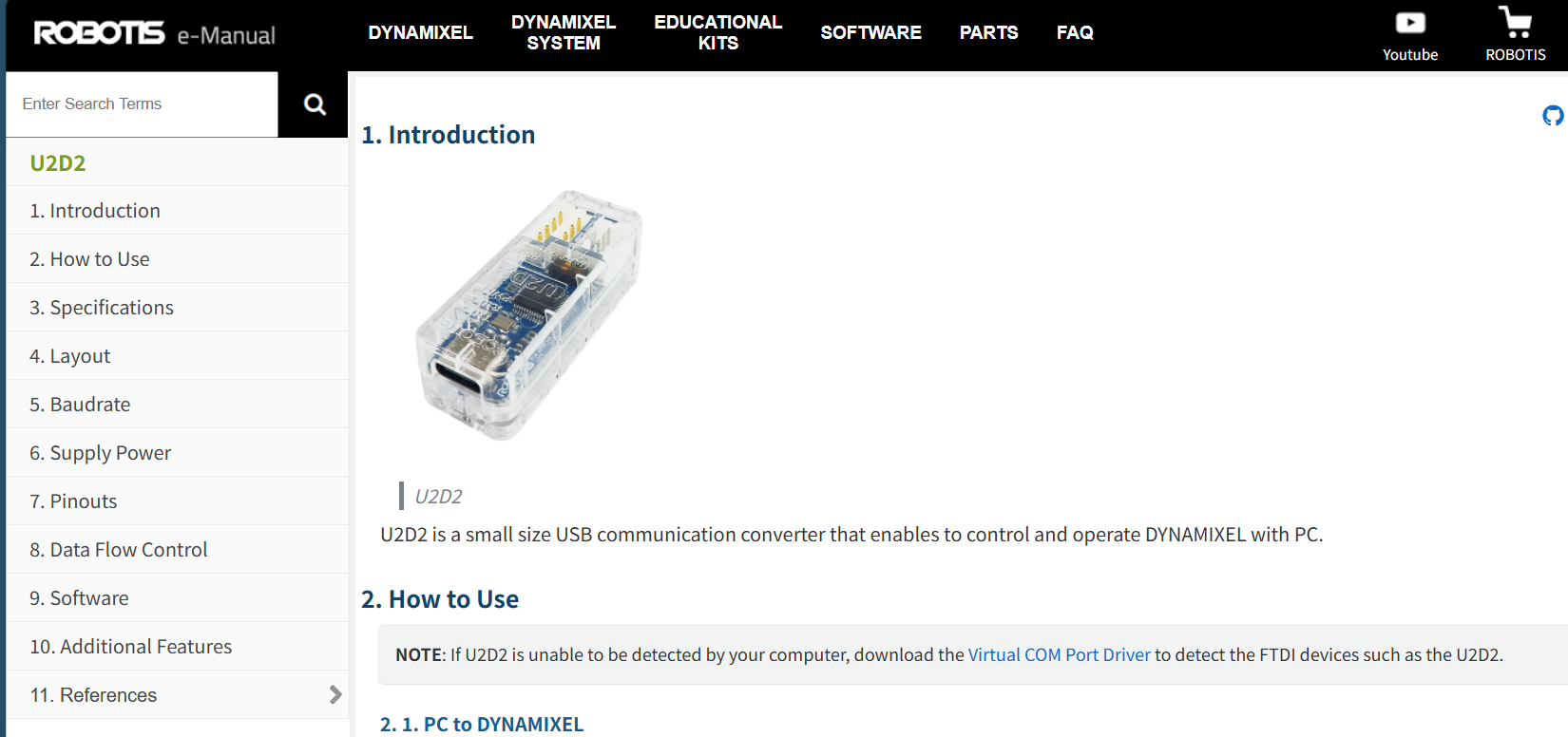
3: U2D2 主板接线
访问U2D2官方文档学习基本电路信息
https://emanual.robotis.com/docs/en/parts/interface/u2d2/
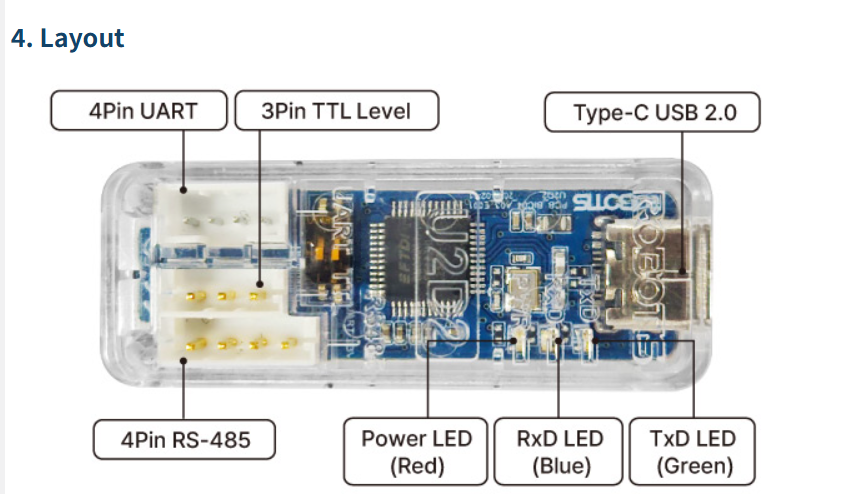
这张图是在说明 ROBOTIS U2D2 转换器 的接口布局(Layout),各标注含义如下:
Type-C USB 2.0:右侧 USB-C 口,用来接电脑(供电 + 通讯)。
4Pin UART:左上 4 针 UART 接口,用于串口总线通讯(常给 X 系列 TTL 设备用)。
3Pin TTL Level:中上 3 针 TTL 电平接口(TX/RX/GND)。
4Pin RS-485:左下 4 针 RS-485 接口(给 RS-485 型号舵机/设备)。
Power LED (Red):电源指示灯(红色),亮表示板子有供电。
RxD LED (Blue):接收数据指示灯(蓝色),闪烁表示正在接收数据。
TxD LED (Green):发送数据指示灯(绿色),闪烁表示正在发送数据。
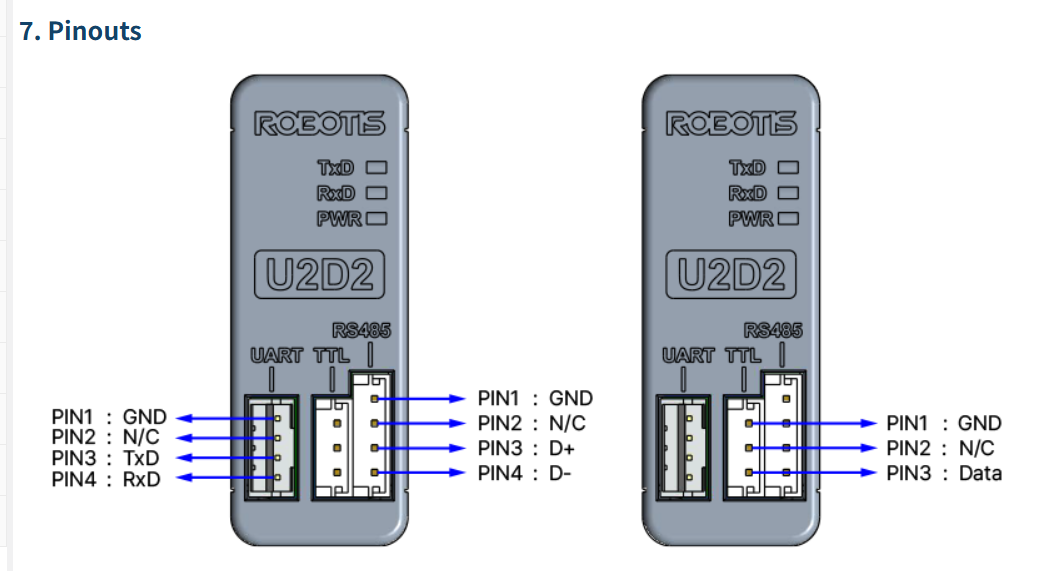
这张图是 U2D2 的 Pinout(引脚定义),把左侧 UART、中间 TTL、右侧 RS485 三个口的每个针脚都标出来了。
UART(4Pin)
PIN1: GND
PIN2: N/C
PIN3: TxD
PIN4: RxD
RS-485(4Pin)
PIN1: GND
PIN2: N/C
PIN3: D+
PIN4: D-
TTL(3Pin)
PIN1: GND
PIN2: N/C
PIN3: Data(半双工单线数据)
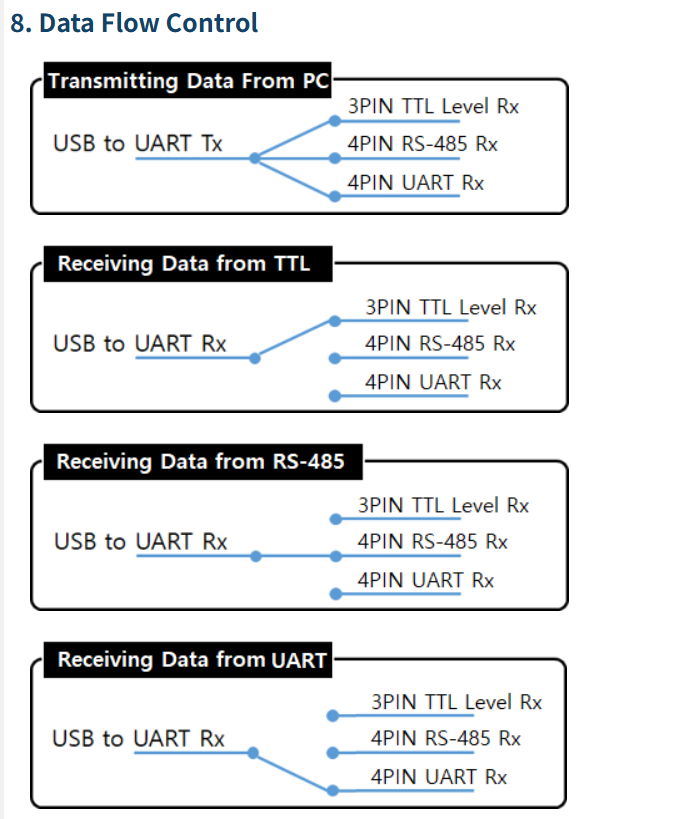
这张图是 U2D2 的数据流路由逻辑(Data Flow Control),核心意思:
电脑发出的数据(USB→UART Tx)会同时广播到三个接口:
3PIN TTL
4PIN RS-485
4PIN UART
回传数据(到 USB→UART Rx)则是单路选择:
若来自 TTL,就走 TTL 路
若来自 RS-485,就走 RS-485 路
若来自 UART,就走 UART 路
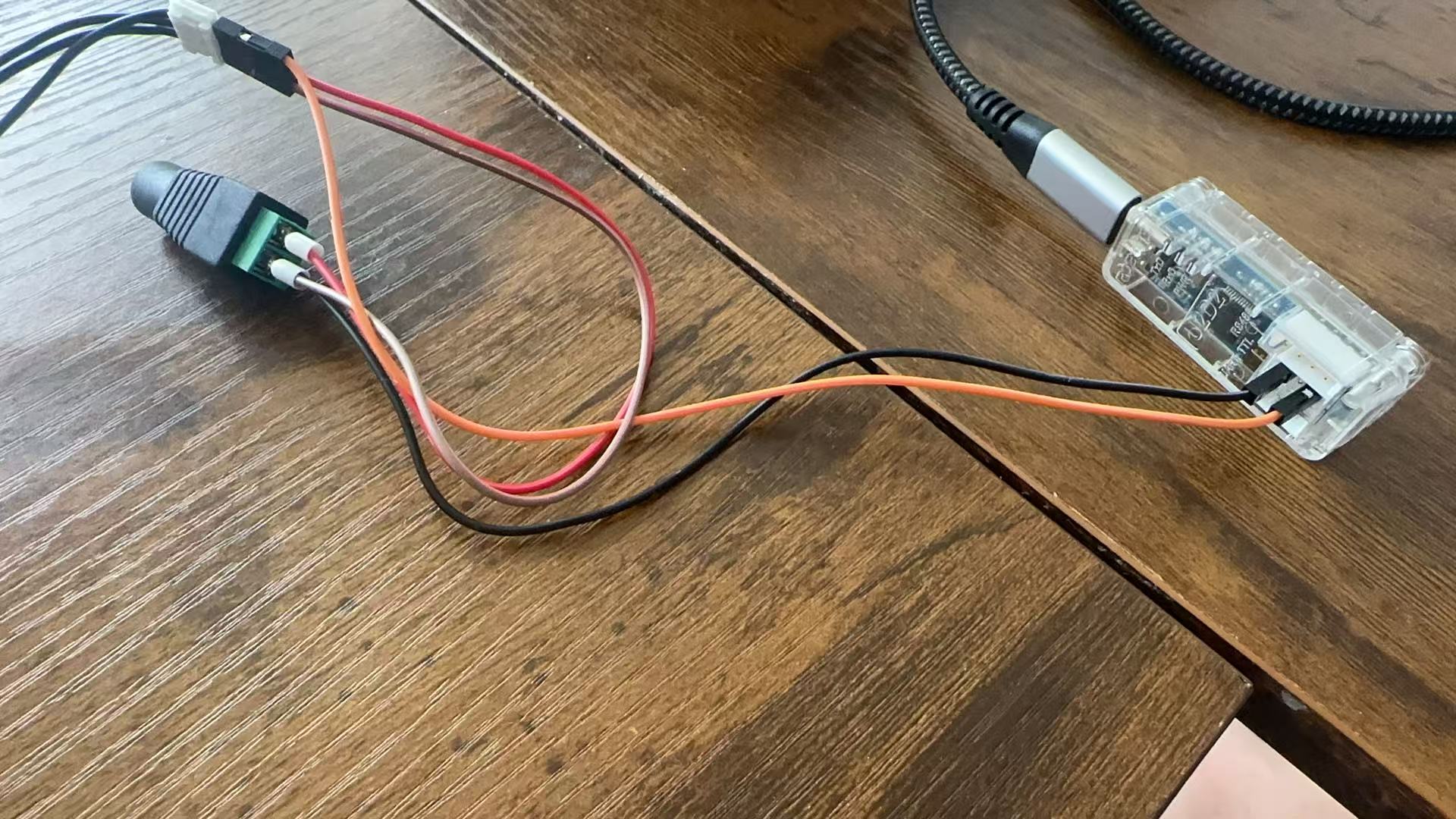
在本文中小编选用的是3PIN TTL,分别将电源DC母口(那个圆圆的装置)延伸出黑线接到GND口,然后舵机延伸出的橙色的线连接到Data接口。 如果有其他的线,自行参考上述文档对应连接即可。
4. 软件设置
介绍会使用的软件:
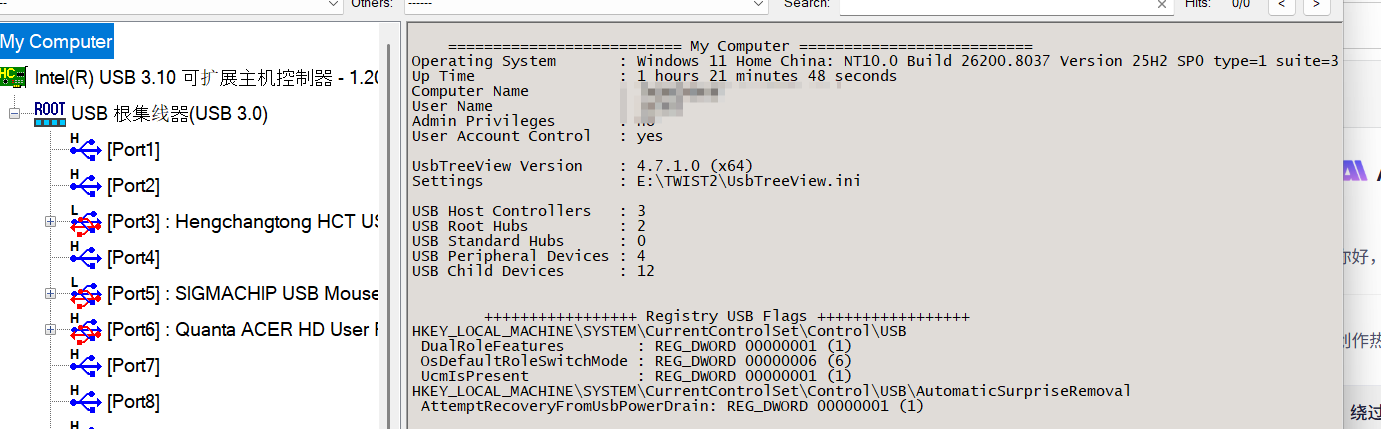
UsbTreeView:查看自己电脑各个接口的信息
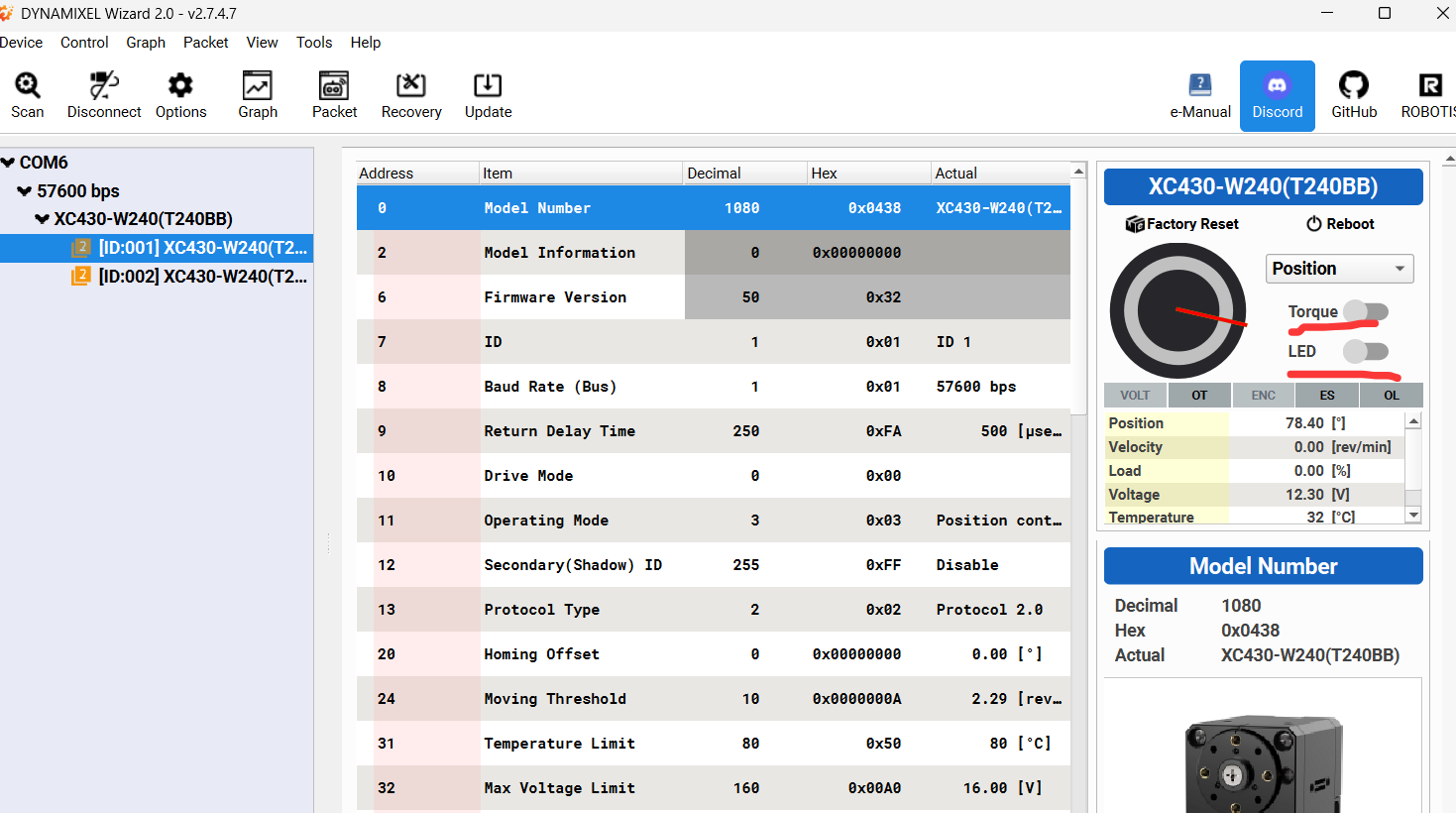
DYNAMIXEL Wizard 2.0:用来通过USB-TYPE 3.0线查看机器人(舵机)的信息,连接的时候U2D2会亮红灯,接受信息的时候闪绿灯
点击SCAN,我这里有2个舵机
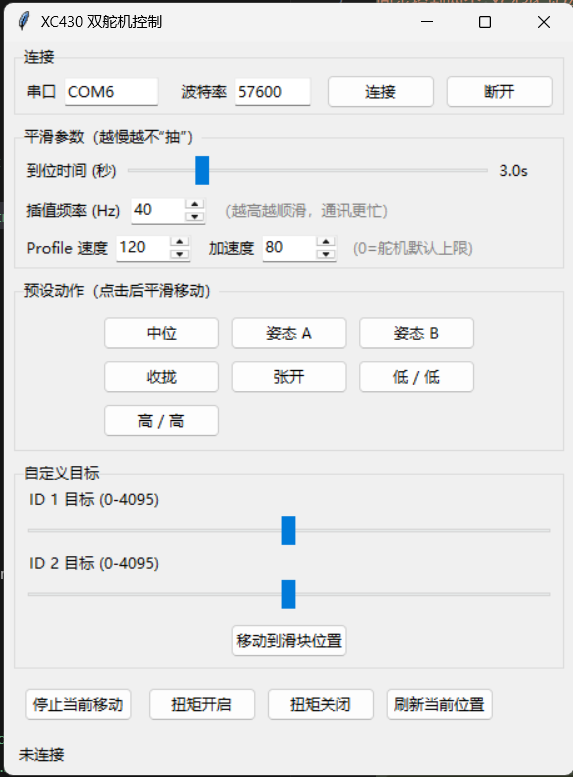
接下来我们就可以写脚本输入给机器人舵机来控制其移动了,
下面是我提供的一个基本的脚本可以参考(代码有点长就直接放链接了自己clone)
https://github.com/GinsengHoney/TWIST-DEMO
最后展示下搭载ZED M的效果

最后的最后感谢论文作者的开源项目,一起学习。
TWIST2 Scalable, Portable, and Holistic Humanoid Data Collection System