文章目录
机械臂仿真与运动学控制,是机器人领域研发落地、算法验证与性能测试的核心关键环节,直接决定机械臂运动精度、控制稳定性与后续进阶算法的适配性。当前机器人仿真平台品类繁多,不同平台在开发主体、渲染能力、物理引擎与适用场景上差异显著,结合Gazebo、MuJoCo、Unity、Isaac Sim四大主流平台核心特性对比可知,各类平台适配场景各有侧重:Gazebo依托开源基金会开发,主打ROS深度绑定与传感器仿真,适合常规机器人教学与基础导航测试;Unity侧重可视化渲染与跨平台交互,偏向VR/AR、虚拟数字孪生场景;Isaac Sim凭借英伟达GPU加速技术,主攻高保真合成数据与大规模并行仿真;而MuJoCo作为DeepMind收购后开源的高性能物理仿真平台,凭借专属自研物理引擎、极致的求解效率与多刚体动力学精度,成为协作机械臂运动学控制仿真的最优选择。
本文正是依托这款高性能物理仿真平台MuJoCo,针对性选取工业与科研领域通用的Franka Emika Panda七自由度协作机械臂为研究对象,完整搭建从模型导入、环境配置到控制验证的全流程仿真环境,为机器人算法测试、运动规划研究打造了一套低成本、零硬件损耗、高安全性的虚拟试验方案,有效规避实体机械臂调试的安全风险与硬件成本问题。从平台核心性能来看,MuJoCo摒弃了冗余的重度渲染设计,采用轻量OpenGL可视化方案,核心发力多刚体物理仿真与高效动力学求解,自研引擎依托凸优化接触模型与广义坐标算法,完美适配七自由度协作机械臂的复杂动力学模拟、精细运动控制需求,能够1:1精准还原Panda机械臂的关节柔性运动特性、转速变化规律与末端执行器位姿动态变化,相比其他平台,在多关节运动求解速度与精度上具备不可替代的优势。
| 维度 | Gazebo (Gazebo Sim / Ignition) | MuJoCo | Unity | Isaac Sim |
|---|---|---|---|---|
| 开发公司 | Open Robotics(开源基金会) | 原Roboti LLC → 2021被DeepMind收购,2022开源 | Unity Technologies(游戏引擎公司) | NVIDIA(英伟达,基于Omniverse) |
| 渲染引擎 | OGRE / 现代OpenGL(PBR、实时阴影) | 轻量OpenGL(极简可视化,非渲染导向) | 内置渲染管线(URP/HDRP)、光线追踪、PBR | RTX 实时光追、Omniverse、PBR、全局光照 |
| 物理引擎 | 支持ODE(默认)、Bullet、Simbody、DART | 自研MuJoCo引擎(凸优化接触、广义坐标) | PhysX 4/5(NVIDIA开发) | PhysX 5(GPU全加速) |
| 主要优势 | 完全开源、ROS深度绑定、传感器丰富、社区成熟 | 多关节/接触精度极高、速度极快、适合优化/RL、轻量 | 跨平台、可视化强、Asset Store、开发效率高、AR/VR | RTX渲染+GPU物理、高保真传感器、合成数据、数字孪生、大规模并行 |
| 典型用途 | ROS机器人、SLAM/导航、移动/机械臂、教学、DARPA竞赛 | 强化学习、人形/四足、生物力学、最优控制、状态估计 | 游戏、VR/AR、虚拟仿真、数字孪生、人机交互、ML-Agents | 工业机器人、人形机器人、自动驾驶、合成数据、数字孪生、RL训练 |
搭建仿真环境
1、下载mujuco:https://mujoco.org/
2、下载好后直接解压:
shell
tar -zxvf mujoco-3.6.0-linux-x86_64.tar.gz
# 尝试启动一下
cd /workspaces/downloads/mujoco-3.6.0/bin
./simulate
3、运行以下命令在 ~/.bashrc 文件的末尾添加内容:
bash
echo 'export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/workspaces/downloads/mujoco-3.6.0/bin' >> ~/.bashrc4、参考网上教程安装anaconda:https://www.cnblogs.com/y4353536666/p/18759902
5、创建虚拟环境
bash
conda create --name mujuco_env python=3.10 -c https://mirrors.tuna.tsinghua.edu.cn/anaconda/pkgs/free/
conda activate mujuco_env
pip install mujoco6、运行自带案例测试安装效果
创建一个Python文件,输入以下代码:
python
import mujoco
# 实际安装路径
model_path = '/workspaces/downloads/mujoco-3.6.0/model/humanoid/humanoid.xml'
model = mujoco.MjModel.from_xml_path(model_path)
data = mujoco.MjData(model)
print(data)
# 调用计时API确保其他组件正常安装
for _ in range(1000): mujoco.mj_step(model, data)
print("Test done.")运行效果

7、验证仿真器
在确保上面的API验证没有报错的前提下需要验证仿真器是否能够正常运行:
bash
cd /workspaces/downloads/mujoco-3.6.0/bin && ./simulate ../model/humanoid/humanoid.xml运行后会弹出仿真器,此时你需要确认以下几点是可用的:
- 小人在没有干预的情况下逐渐躺到在地面;
- 右侧打开 Control 面板拖动控制条,小人对应的关节是可动的;
导入URDF仿真模型
方法一:使用命令行转换 URDF → MJCF
shell
cd /workspaces/downloads/mujoco-3.6.0/bin
# 用 MuJoCo 自带的 compile 工具
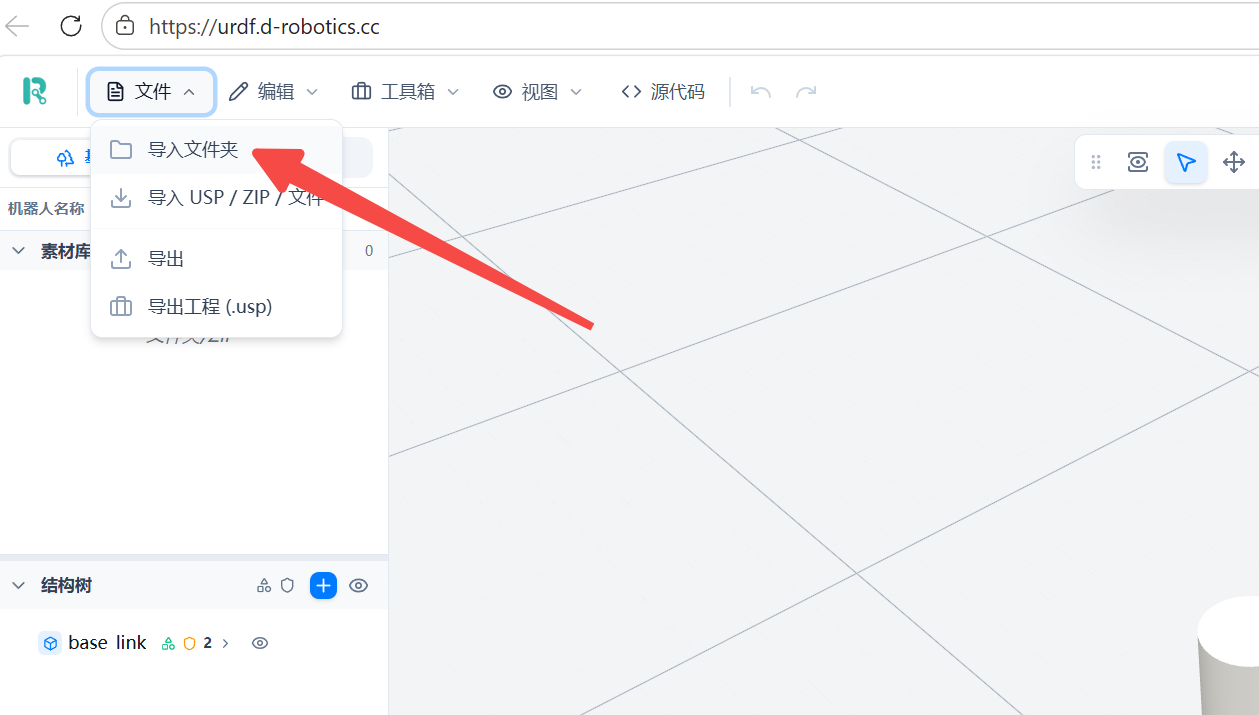
./compile your_robot.urdf your_robot_mjcf.xml方法二:使用URDF-Studio工具【推荐】
参考
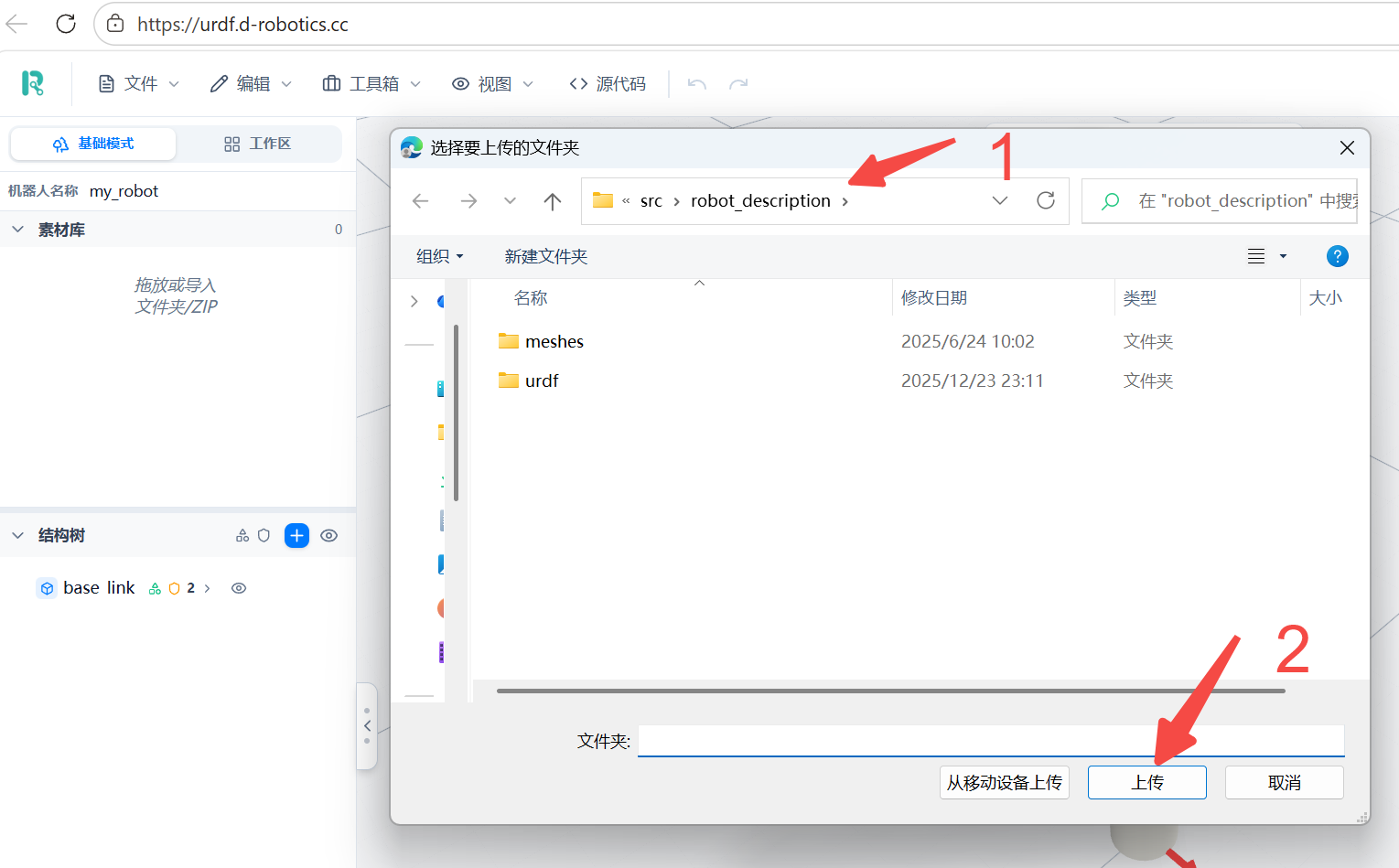
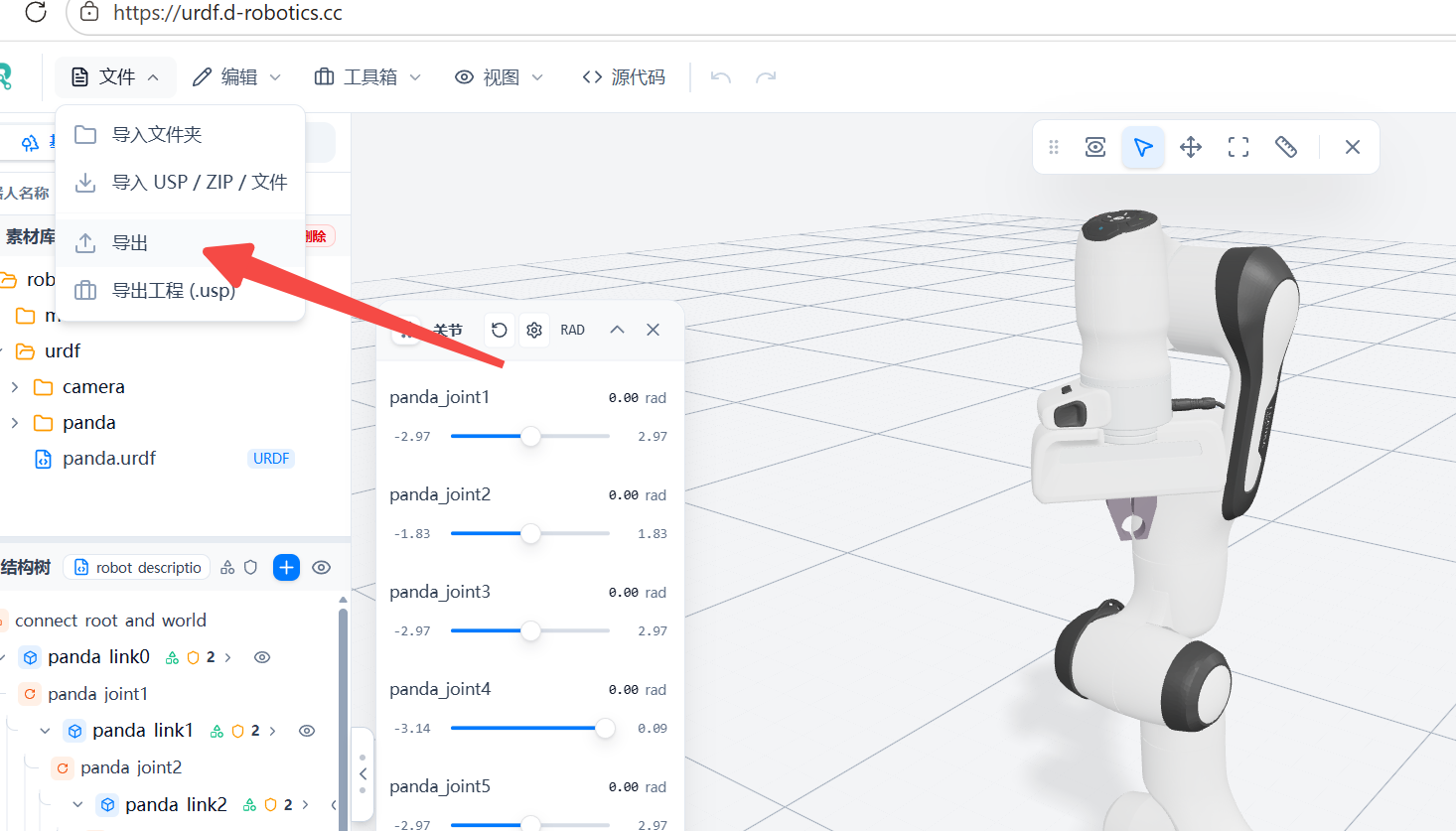
1、打开https://urdf.d-robotics.cc/,导入urdf所在的文件夹。
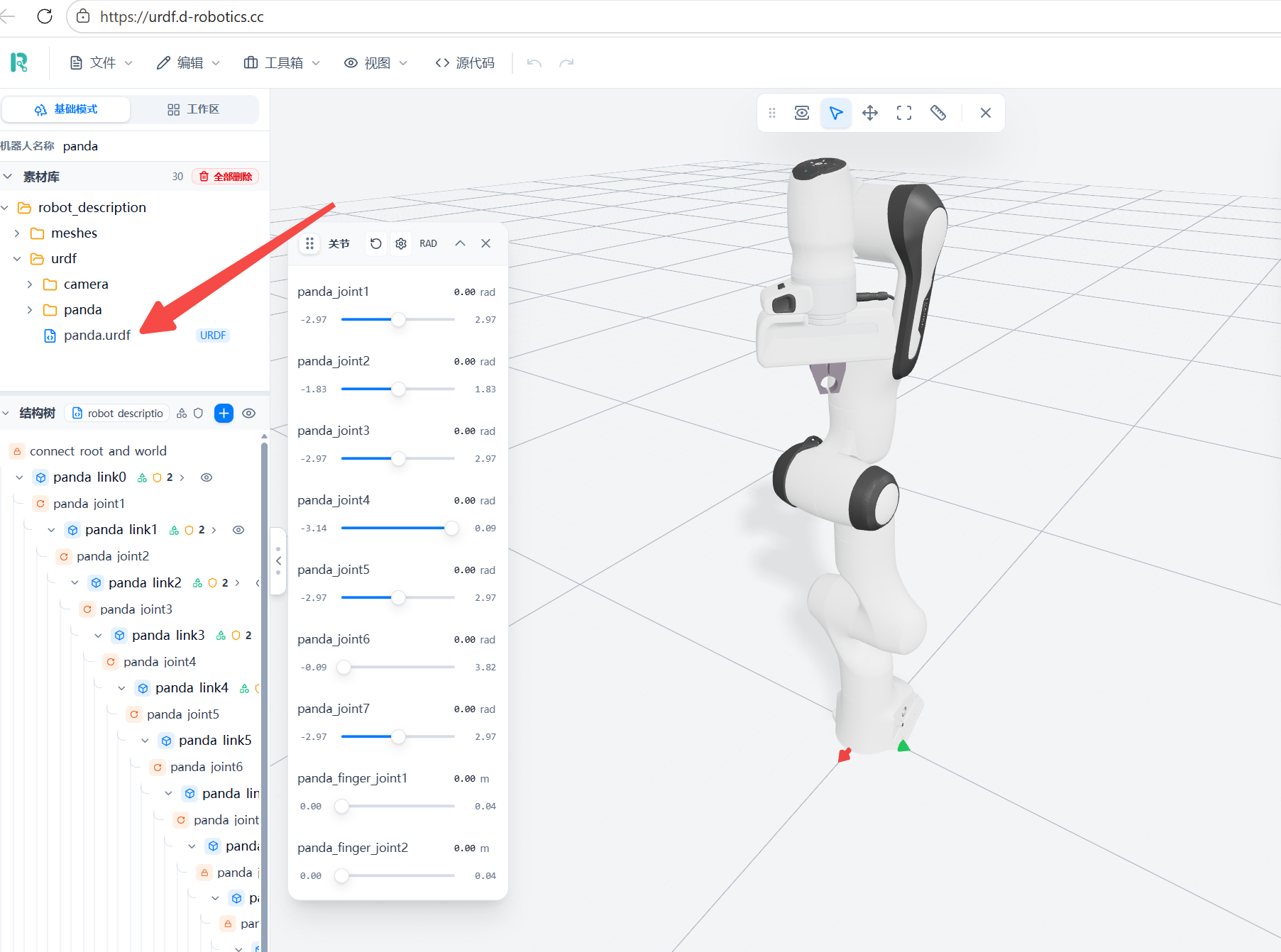
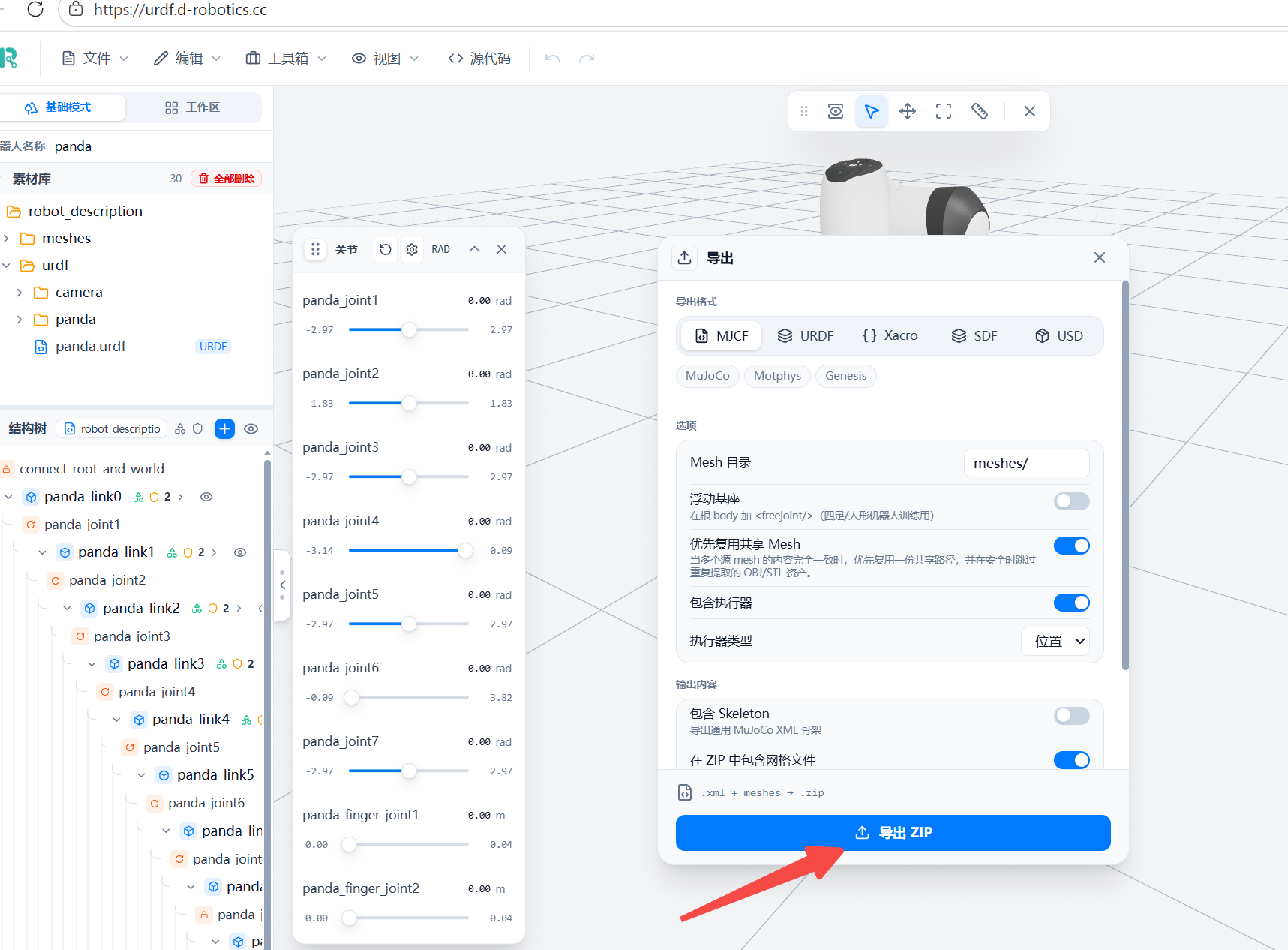
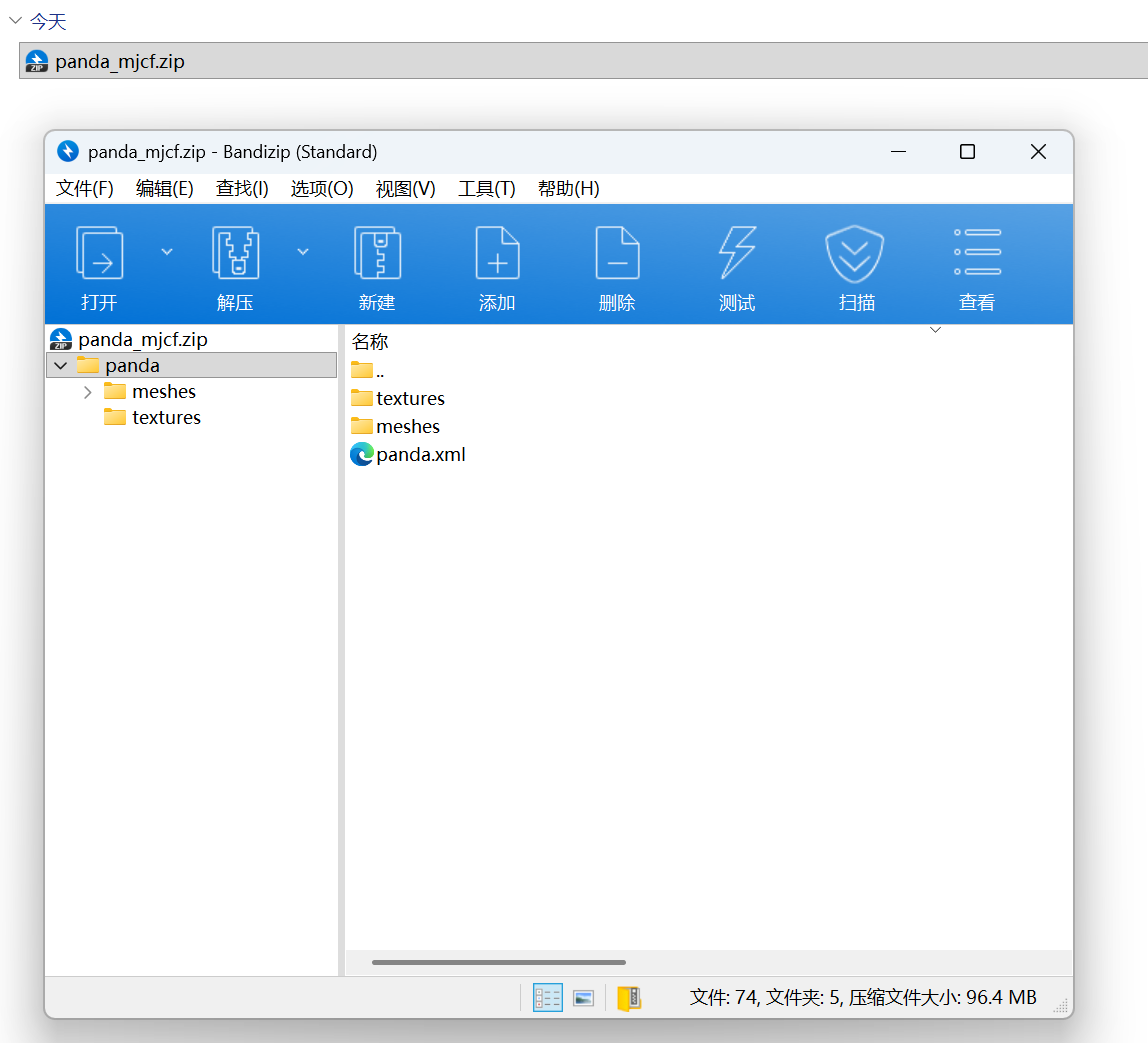
2、导出mujuco模型
3、mujuco导入模型
bash
cd /workspaces/downloads/mujoco-3.6.0/bin && ./simulate /workspaces/docs/learn_mujuco/panda_mjcf/panda.xml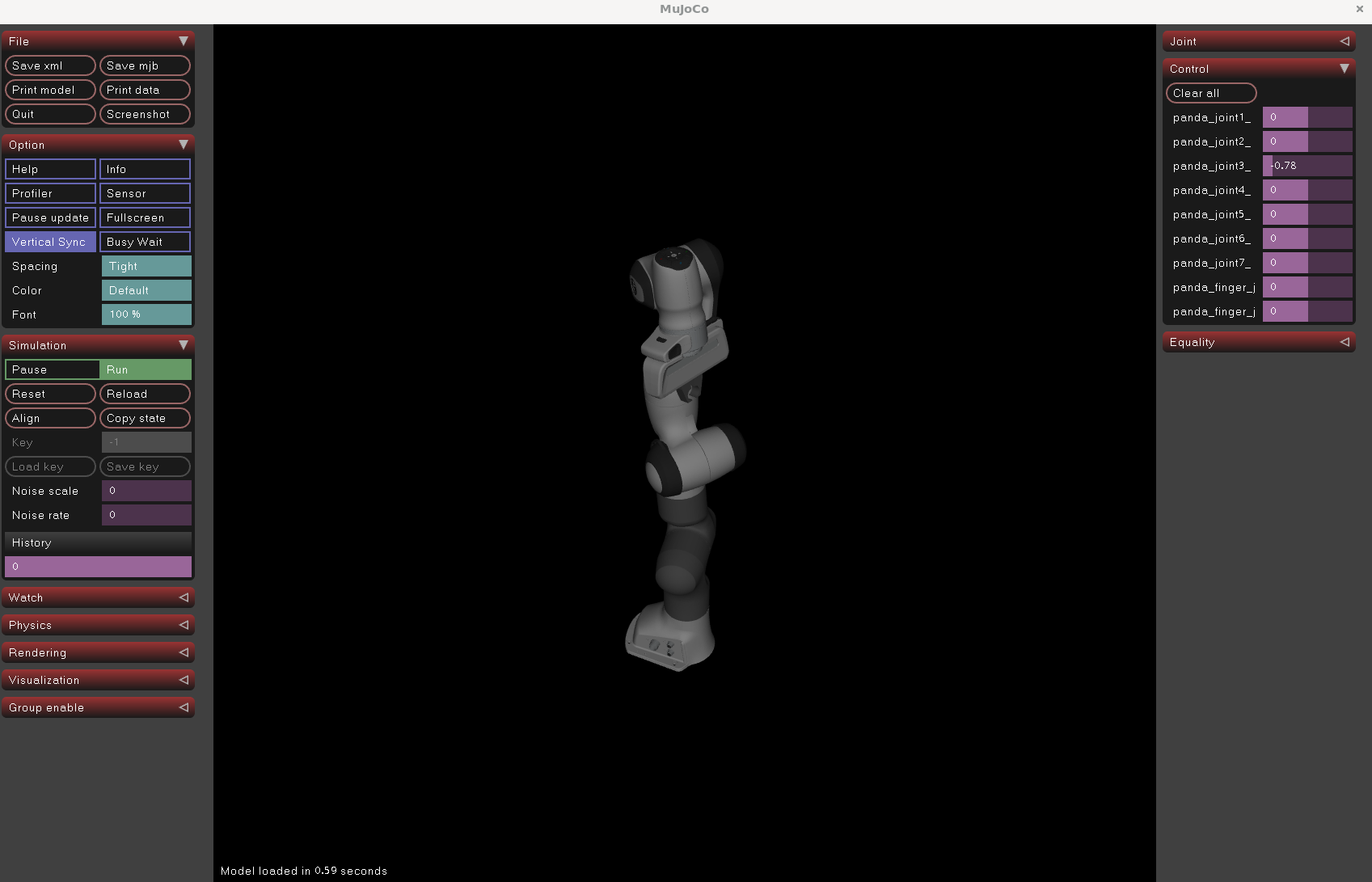
参考
- https://github.com/HaoxiangYou/MujocoTutorials
- https://github.com/LitchiCheng/mujoco-learning
- https://www.bilibili.com/video/BV1AKdHYyEQh/?spm_id_from=333.337.search-card.all.click&vd_source=3bf4271e80f39cfee030114782480463
- https://blog.csdn.net/nenchoumi3119/article/details/148085428
- https://www.bilibili.com/video/BV1tDxAzTEFM/?spm_id_from=333.337.search-card.all.click&vd_source=3bf4271e80f39cfee030114782480463
- https://www.bilibili.com/video/BV1tDxAzTEFM/?spm_id_from=333.337.search-card.all.click&vd_source=3bf4271e80f39cfee030114782480463
- https://blog.csdn.net/Vint_LU/article/details/147948556