安装辅助工具
sudo apt install wireshark-qt
启动辅助工具
sudo wireshark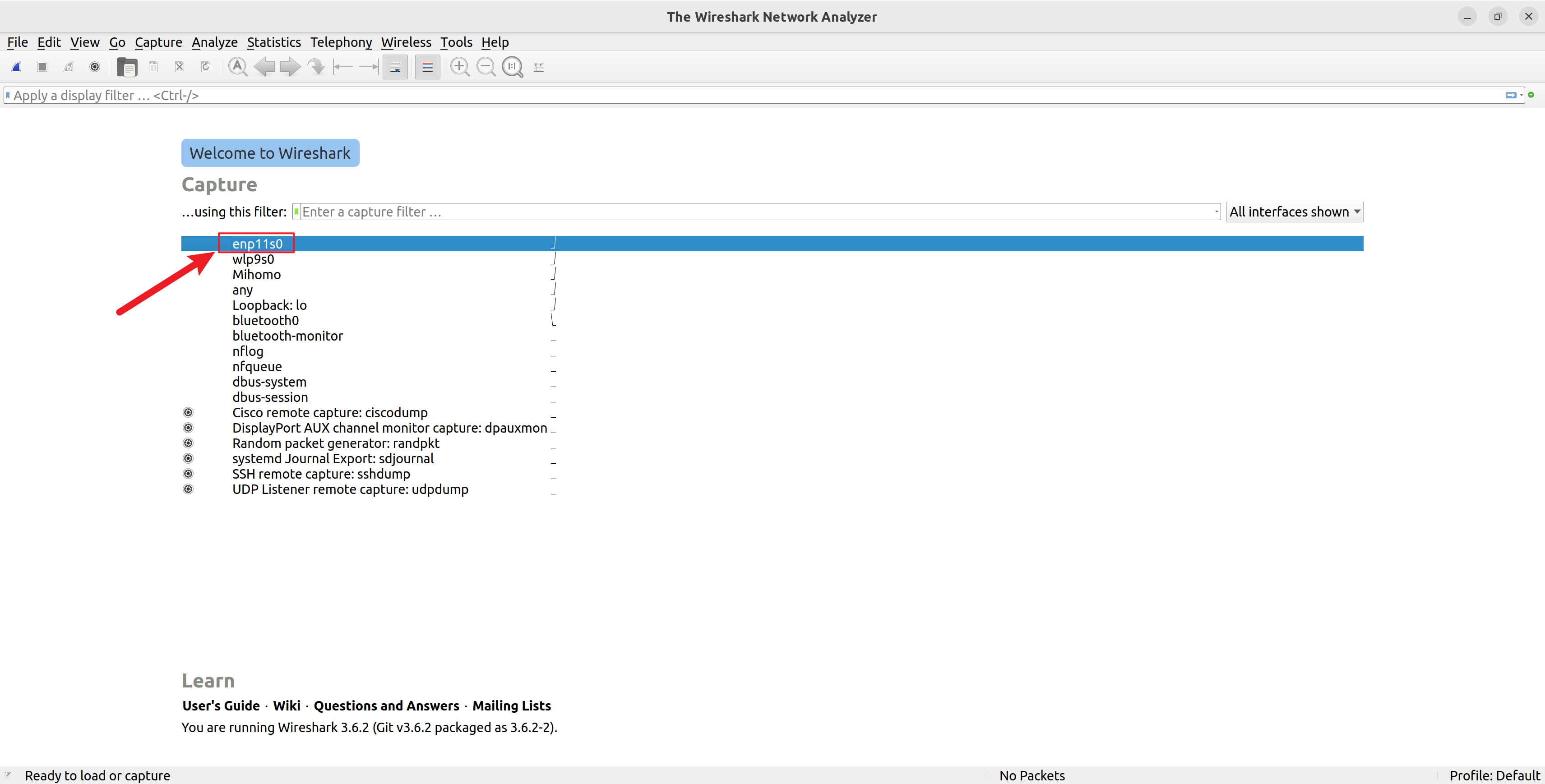
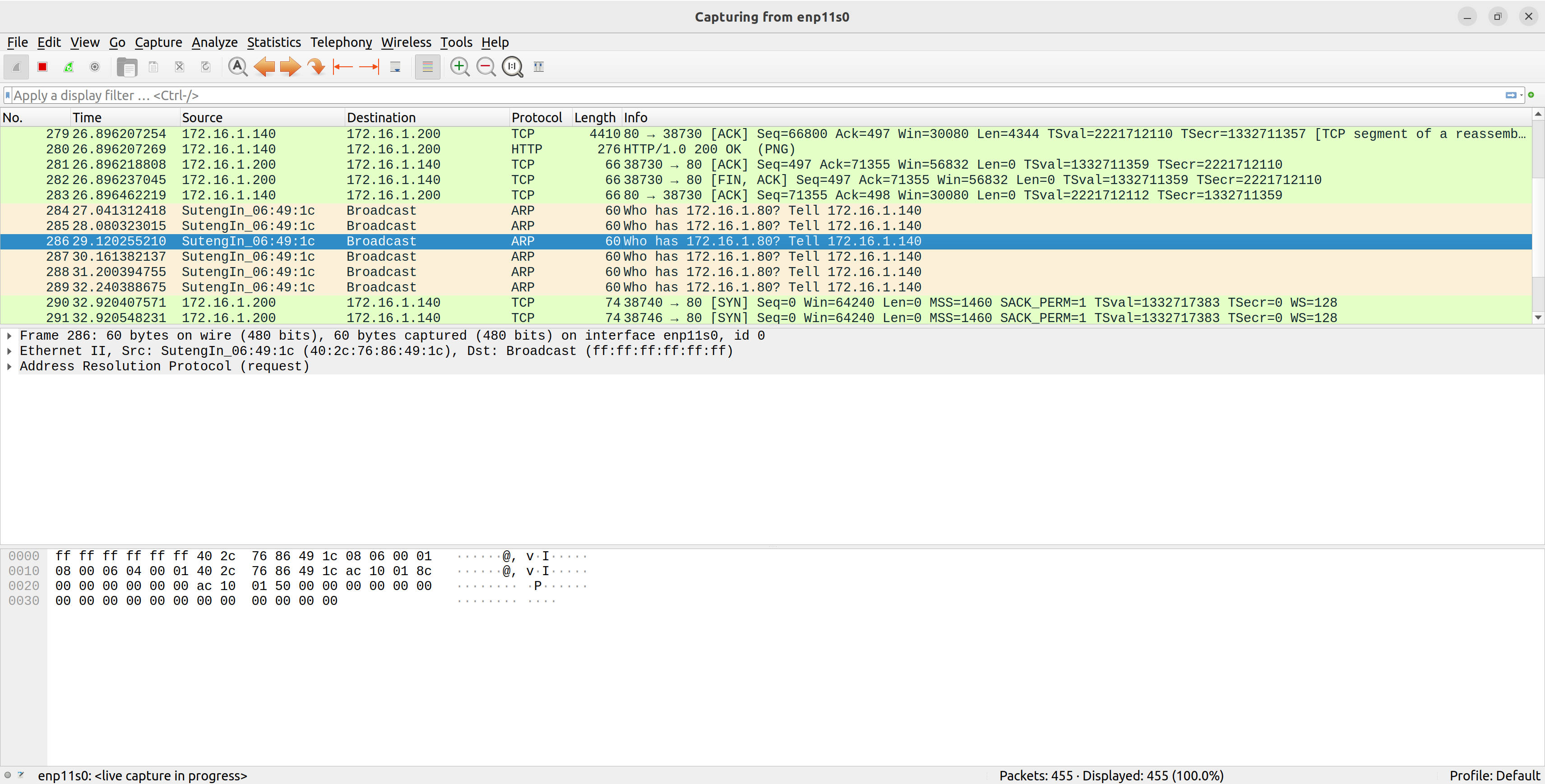
记录下 Who 和 Tell 后面的 IP 地址
Who 是要给电脑设置的 IP 地址
Tell 是雷达自身的 IP 地址
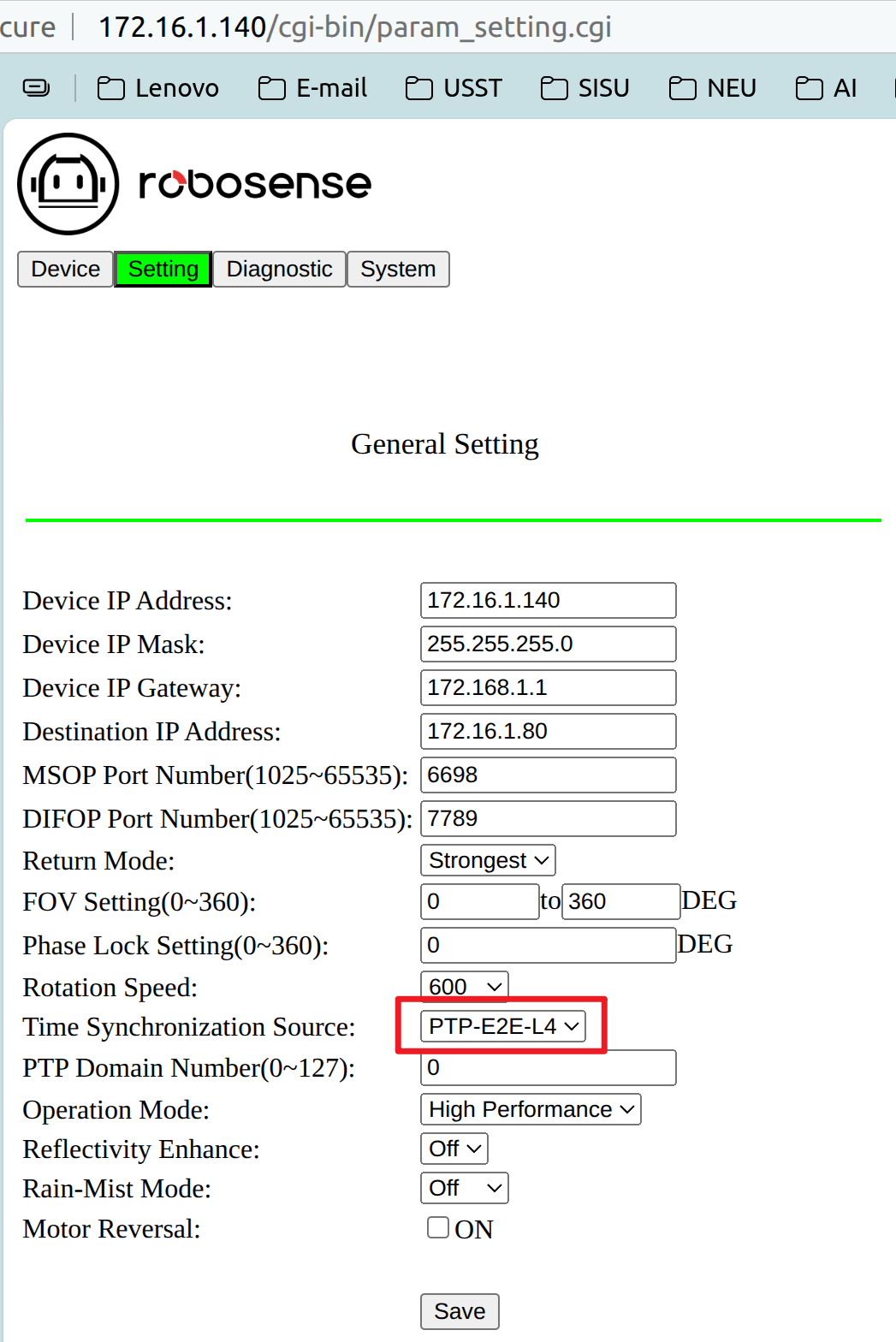
在网页中访问雷达 IP 地址
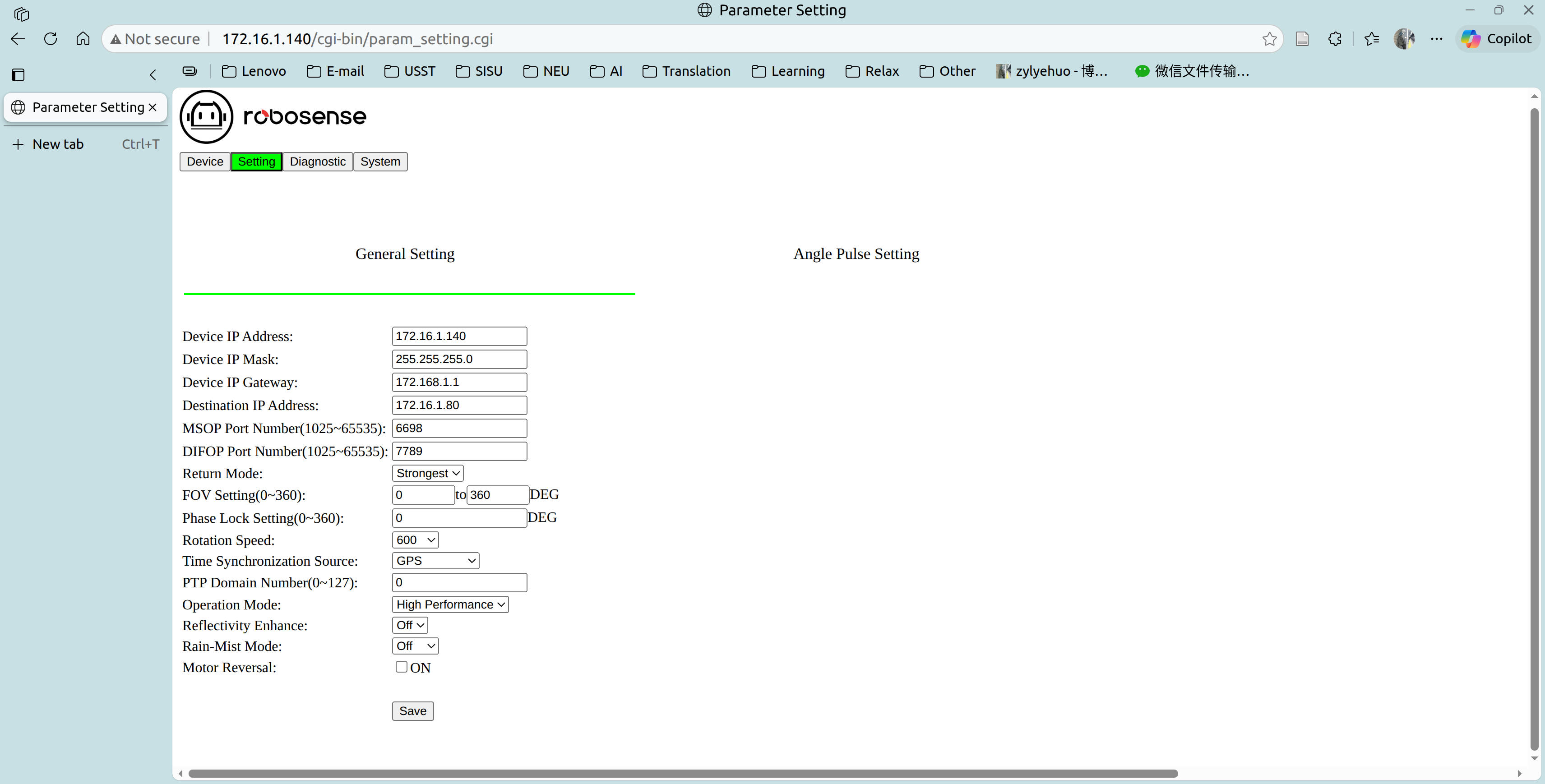
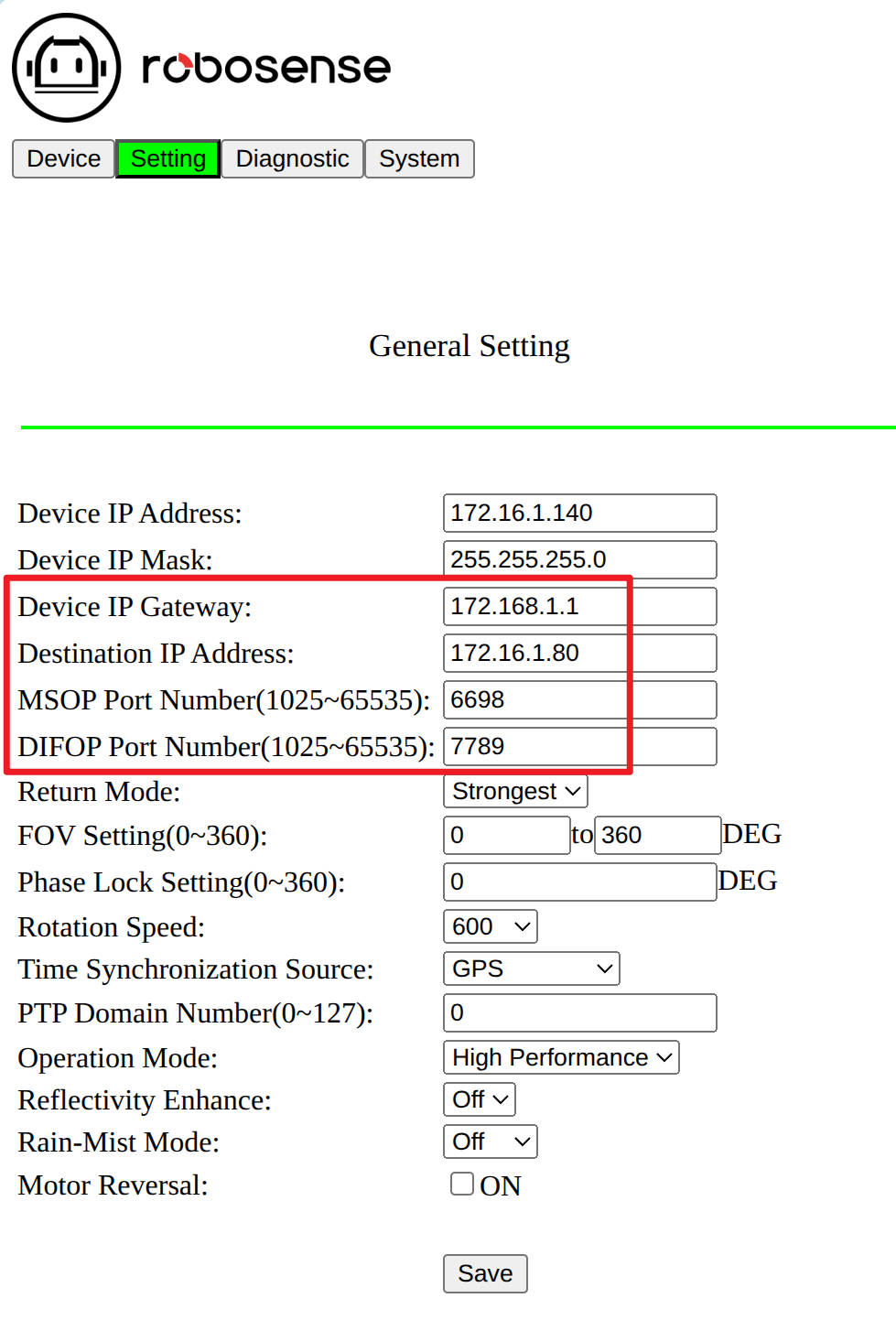
记录下这些配置
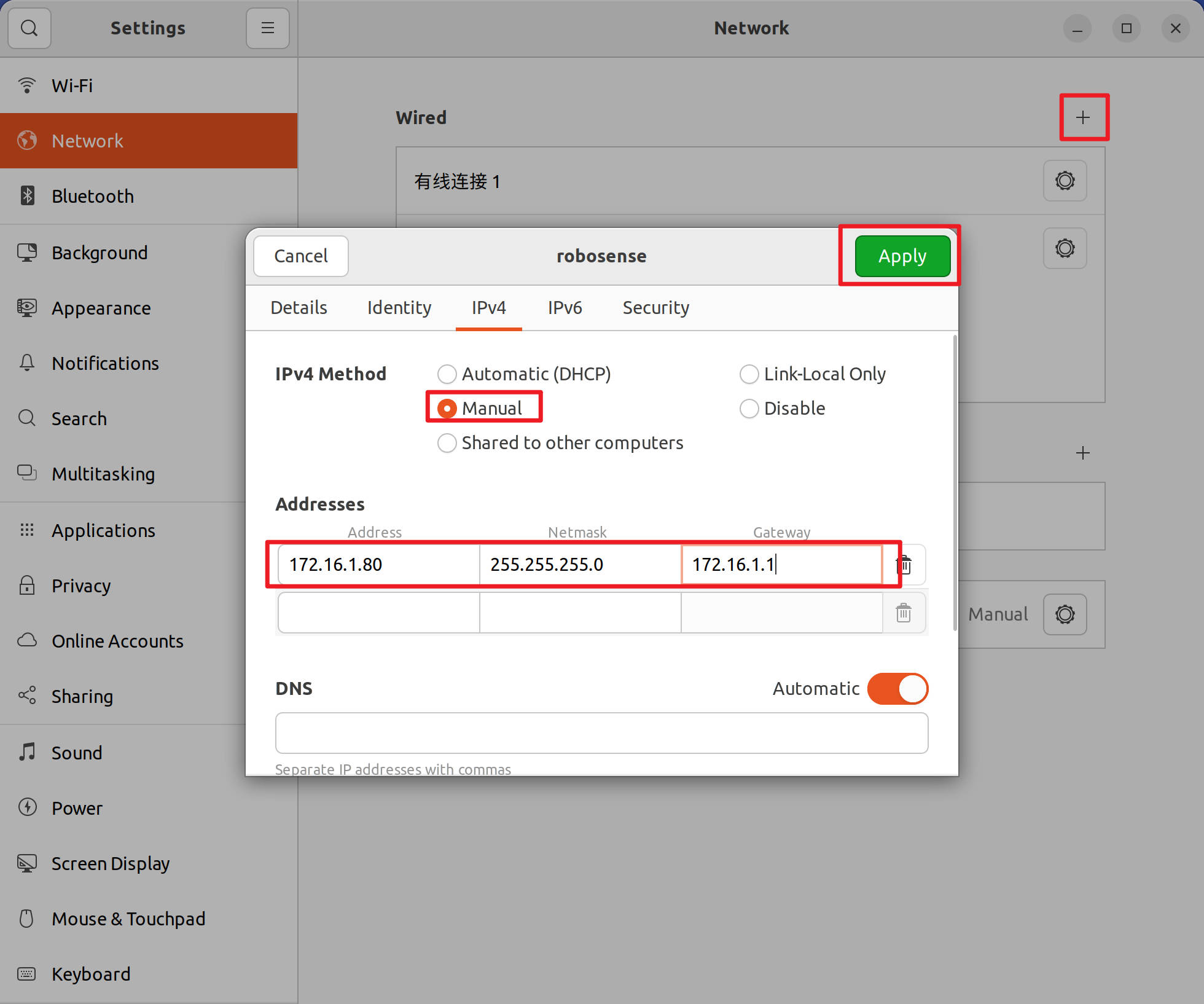
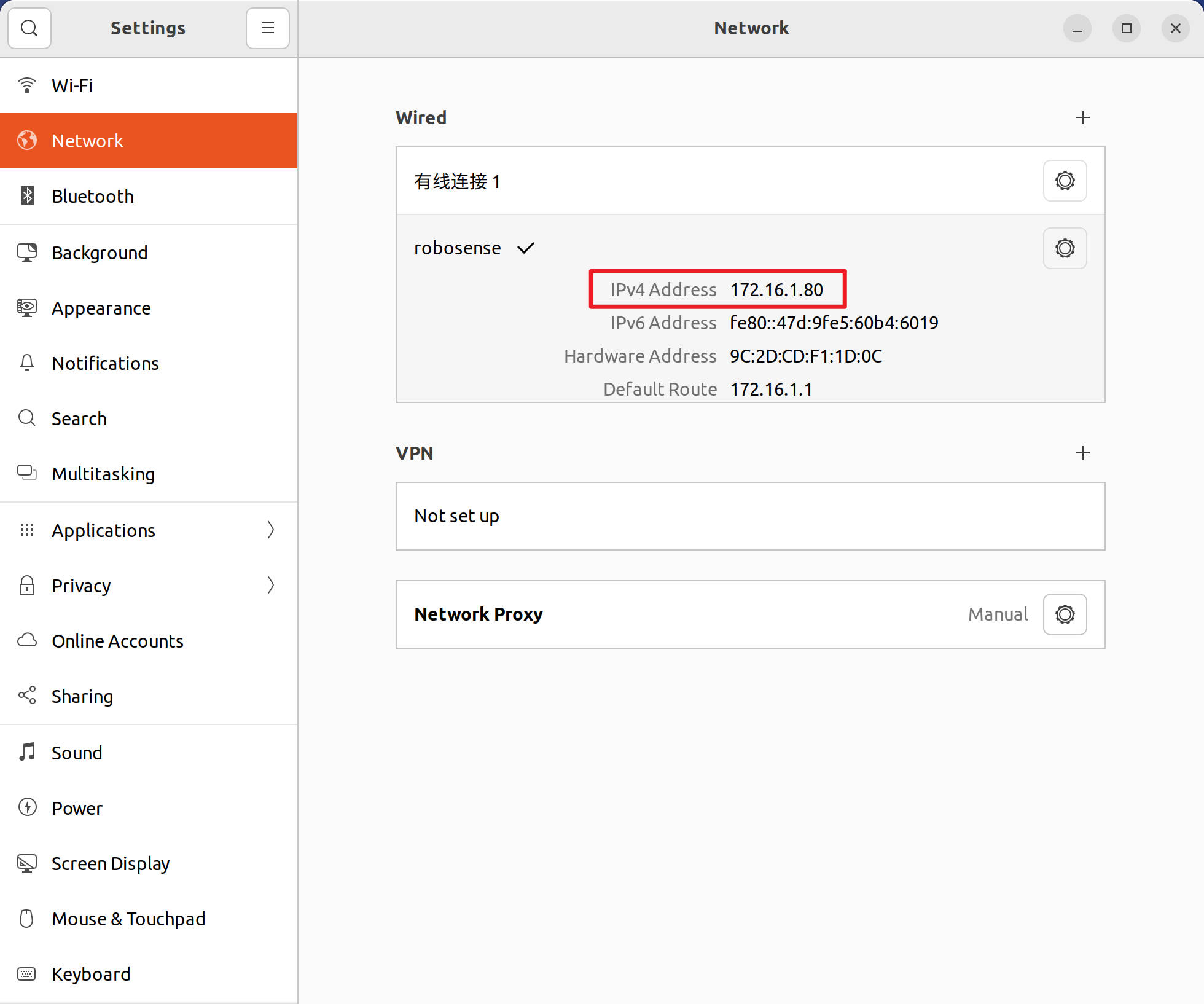
为电脑配置 IP 地址
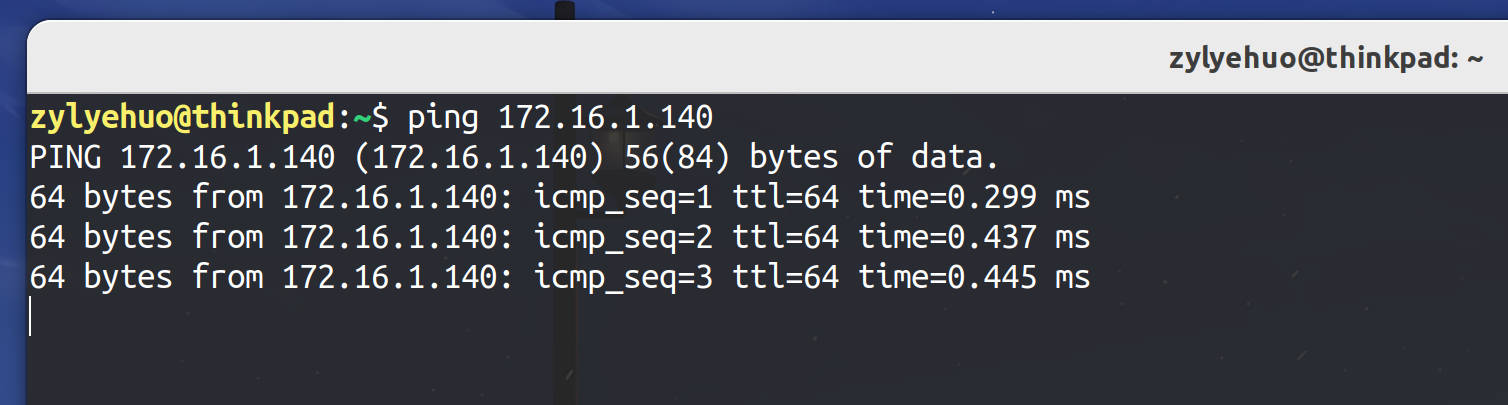
测试电脑能否 ping 通雷达
配置 xsense mti 300
为 IMU 的 USB 接口赋予权限
ls /dev/tty # 双击 Tab 键
sudo chmod 777 /dev/ttyUSB0下载并编译驱动功能包
下载并编译雷达驱动功能包
mkdir -p driver_ws/src
cd driver_ws/src
git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
cd rslidar_sdk
git submodule init
git submodule update
sudo apt-get update
sudo apt-get install -y libyaml-cpp-dev
sudo apt-get install -y libpcap-dev
cd driver_ws
catkin_make下载并编译 IMU 驱动功能包
cd /home/yehuo/Downloads
git clone https://github.com/xsenssupport/Xsens_MTi_ROS_Driver_and_Ntrip_Client.git
将下载下来的项目中的 ros 驱动复制到工作空间的 src 路径下
sudo apt install ros-$ROS_DISTRO-nmea-msgs
sudo apt install ros-$ROS_DISTRO-mavros-msgs
sudo chmod -R o+rw xsens_ros_mti_driver/
cd ..
pushd src/xsens_ros_mti_driver/lib/xspublic && make && popd
catkin_make测试
雷达与 IMU 时间同步
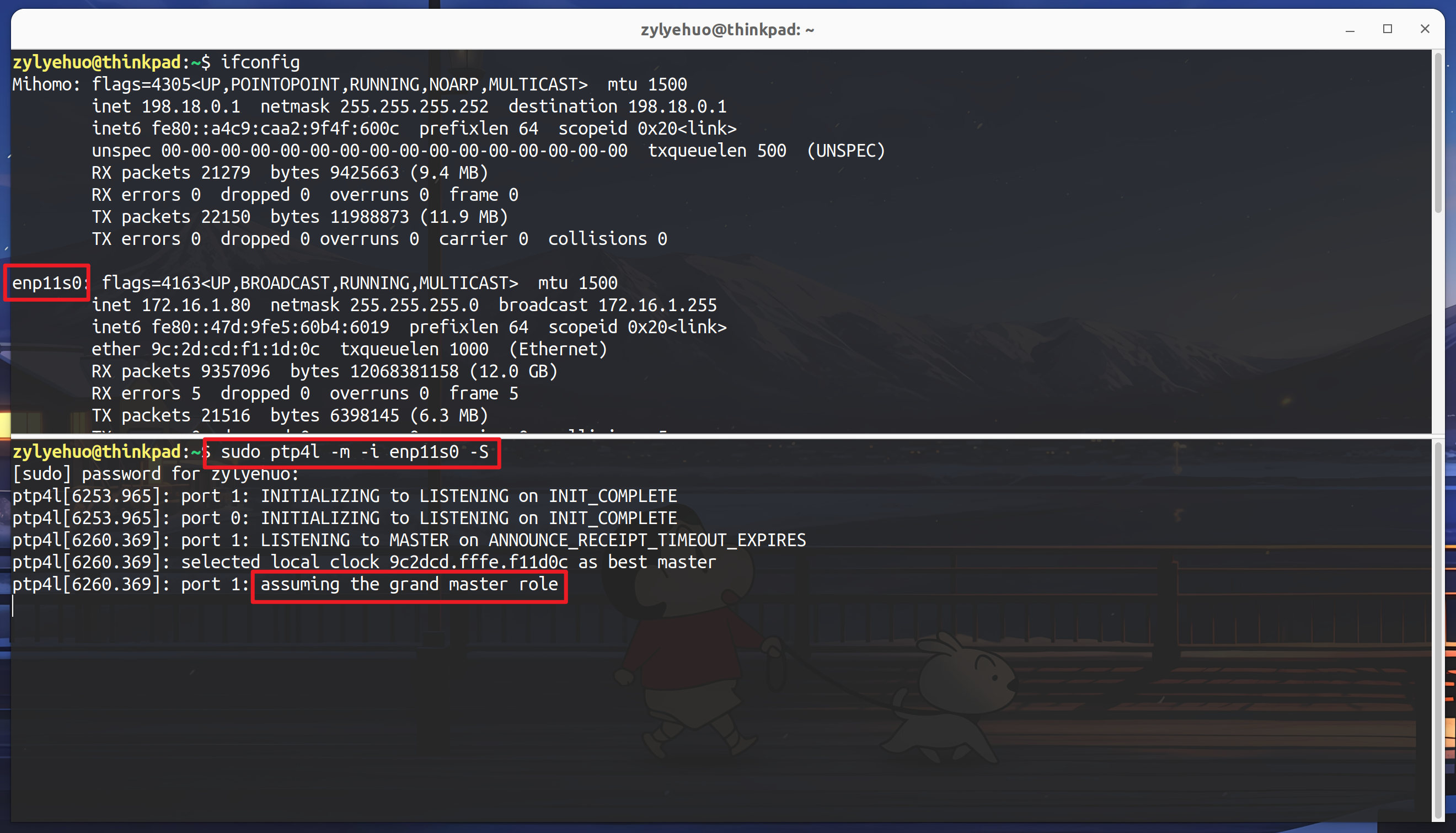
sudo ptp4l -m -i enp11s0 -S测试 robosense Helios 32(速腾)
修改 config.yaml 配置文件
与雷达网页上记录的配置参数相对应
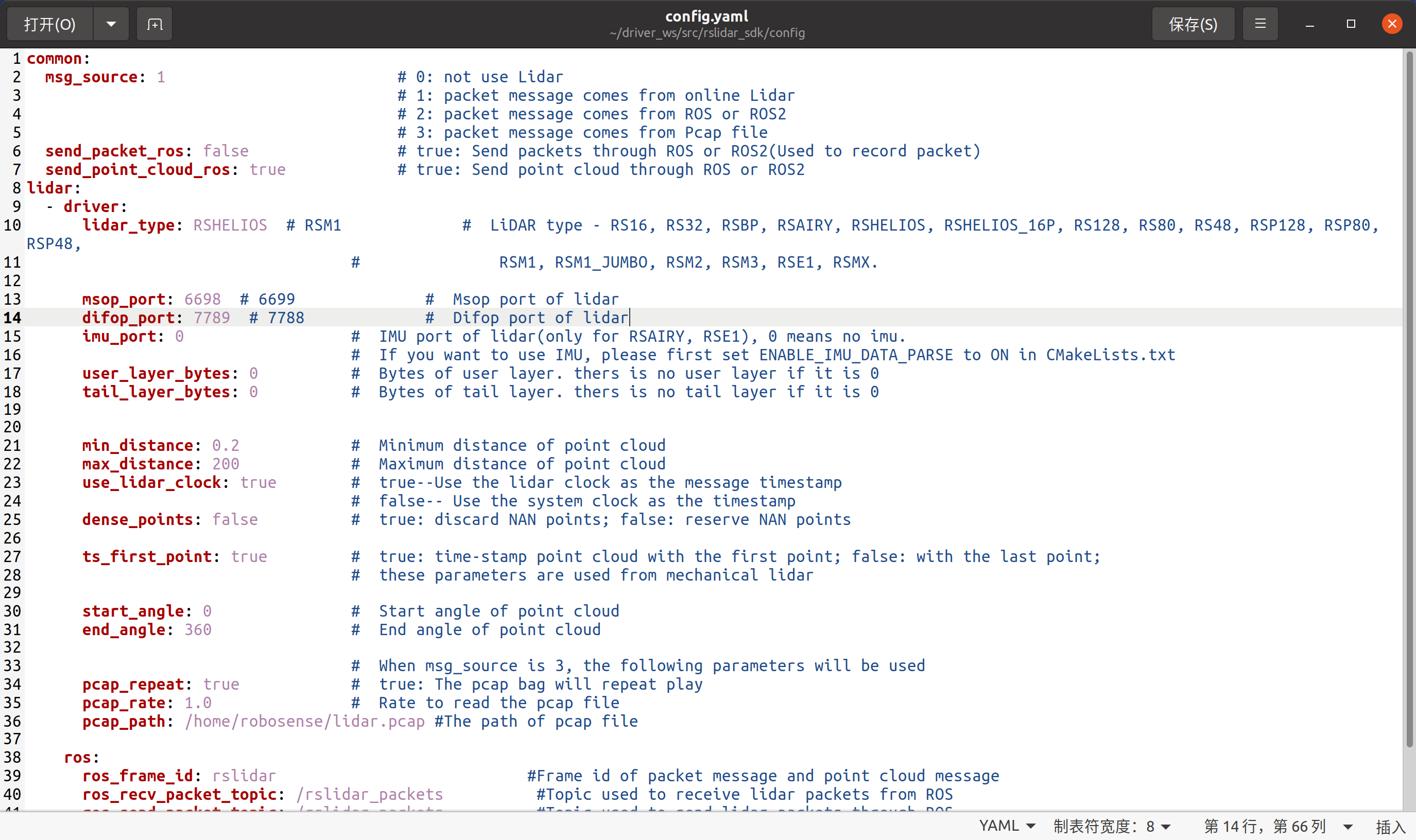
common:
msg_source: 1 # 0: not use Lidar
# 1: packet message comes from online Lidar
# 2: packet message comes from ROS or ROS2
# 3: packet message comes from Pcap file
send_packet_ros: false # true: Send packets through ROS or ROS2(Used to record packet)
send_point_cloud_ros: true # true: Send point cloud through ROS or ROS2
lidar:
- driver:
lidar_type: RSHELIOS # RSM1 # LiDAR type - RS16, RS32, RSBP, RSAIRY, RSHELIOS, RSHELIOS_16P, RS128, RS80, RS48, RSP128, RSP80, RSP48,
# RSM1, RSM1_JUMBO, RSM2, RSM3, RSE1, RSMX.
msop_port: 6698 # 6699 # Msop port of lidar
difop_port: 7789 # 7788 # Difop port of lidar
imu_port: 0 # IMU port of lidar(only for RSAIRY, RSE1), 0 means no imu.
# If you want to use IMU, please first set ENABLE_IMU_DATA_PARSE to ON in CMakeLists.txt
user_layer_bytes: 0 # Bytes of user layer. thers is no user layer if it is 0
tail_layer_bytes: 0 # Bytes of tail layer. thers is no tail layer if it is 0
min_distance: 0.2 # Minimum distance of point cloud
max_distance: 200 # Maximum distance of point cloud
use_lidar_clock: true # true--Use the lidar clock as the message timestamp
# false-- Use the system clock as the timestamp
dense_points: false # true: discard NAN points; false: reserve NAN points
ts_first_point: true # true: time-stamp point cloud with the first point; false: with the last point;
# these parameters are used from mechanical lidar
start_angle: 0 # Start angle of point cloud
end_angle: 360 # End angle of point cloud
# When msg_source is 3, the following parameters will be used
pcap_repeat: true # true: The pcap bag will repeat play
pcap_rate: 1.0 # Rate to read the pcap file
pcap_path: /home/robosense/lidar.pcap #The path of pcap file
ros:
ros_frame_id: rslidar #Frame id of packet message and point cloud message
ros_recv_packet_topic: /rslidar_packets #Topic used to receive lidar packets from ROS
ros_send_packet_topic: /rslidar_packets #Topic used to send lidar packets through ROS
ros_send_imu_data_topic: /rslidar_imu_data #Topic used to send imu data through ROS
ros_send_point_cloud_topic: /rslidar_points #Topic used to send point cloud through ROS
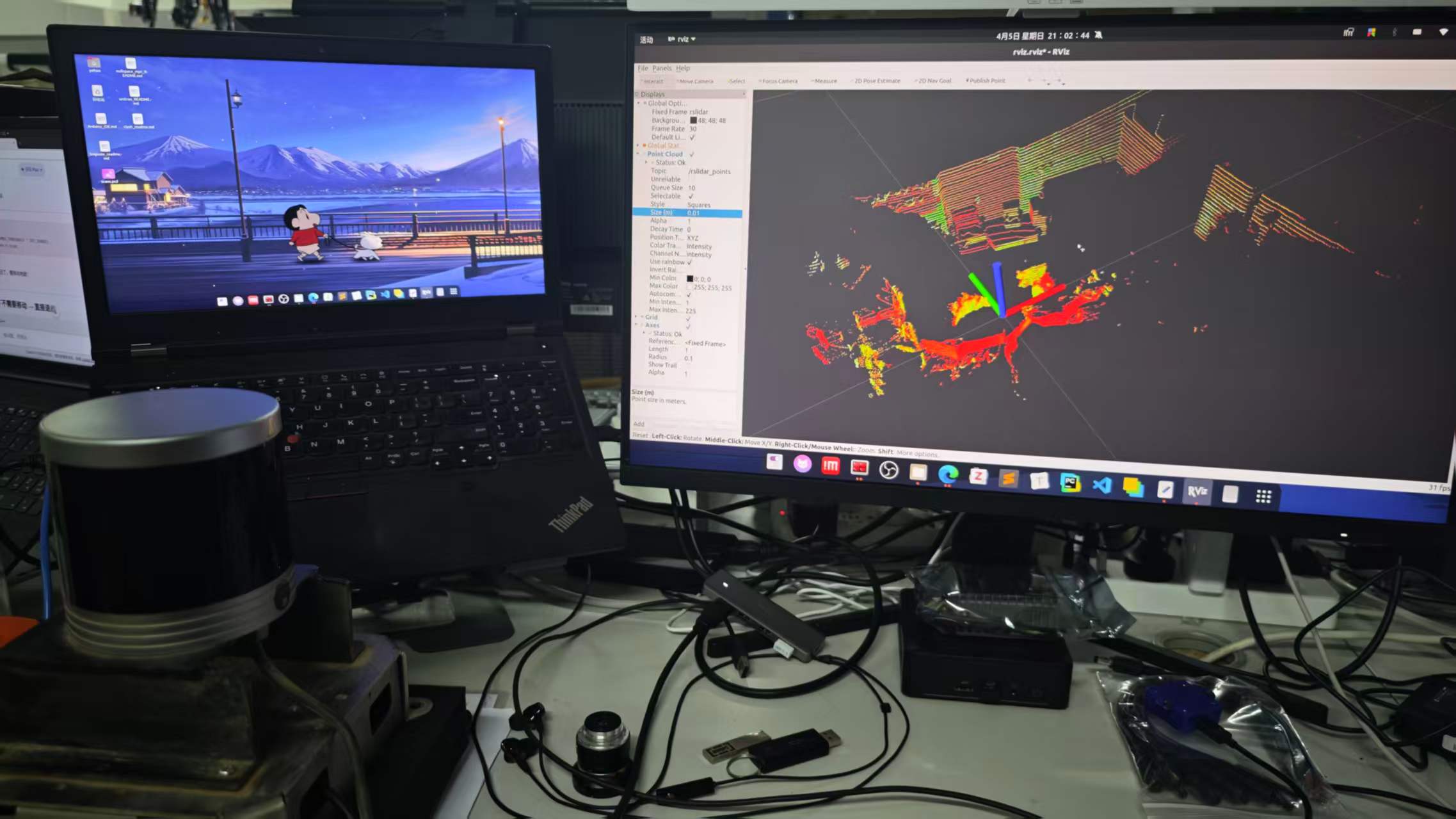
ros_queue_length: 100 #Topic QoS history depth启动 launch 文件进行测试
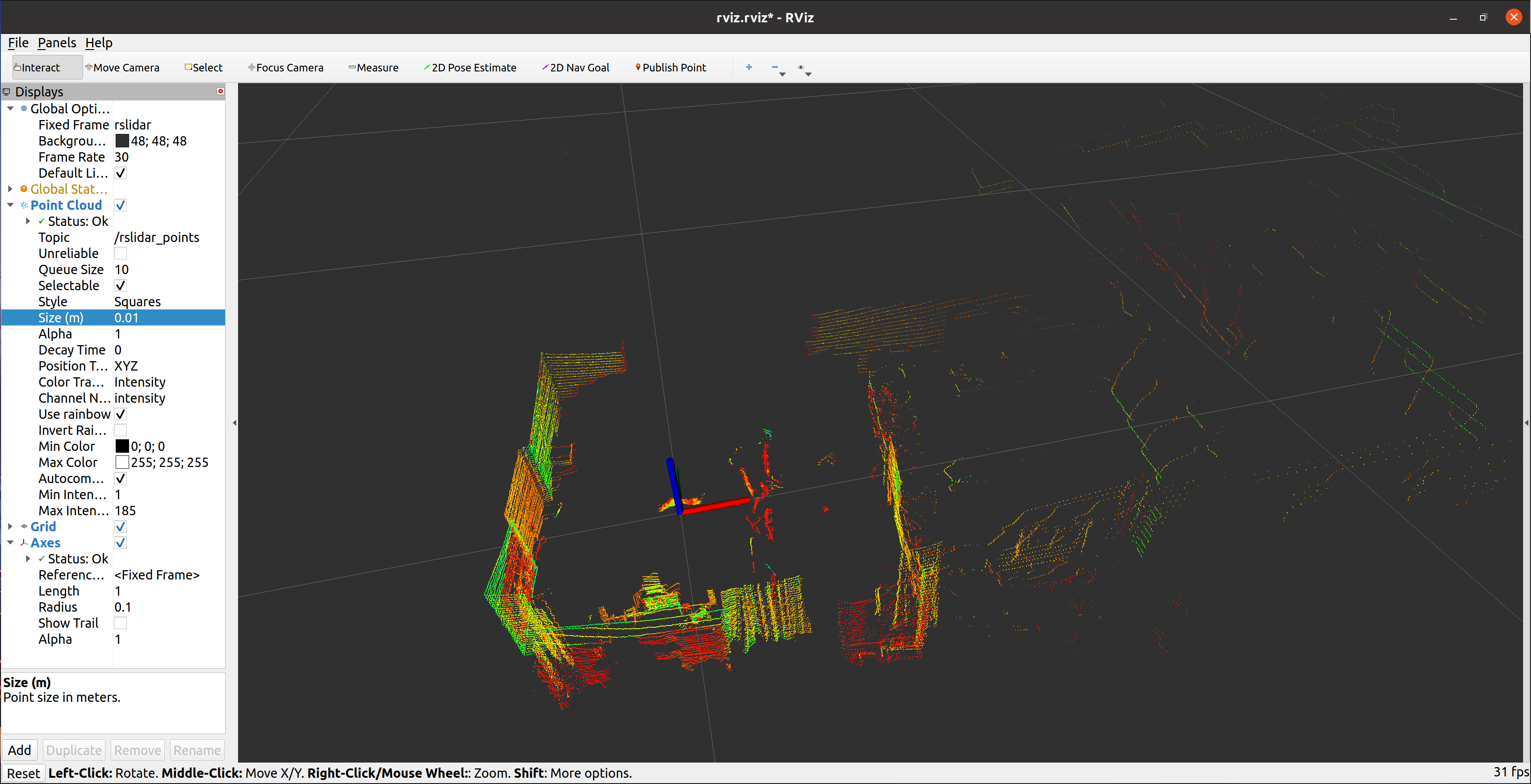
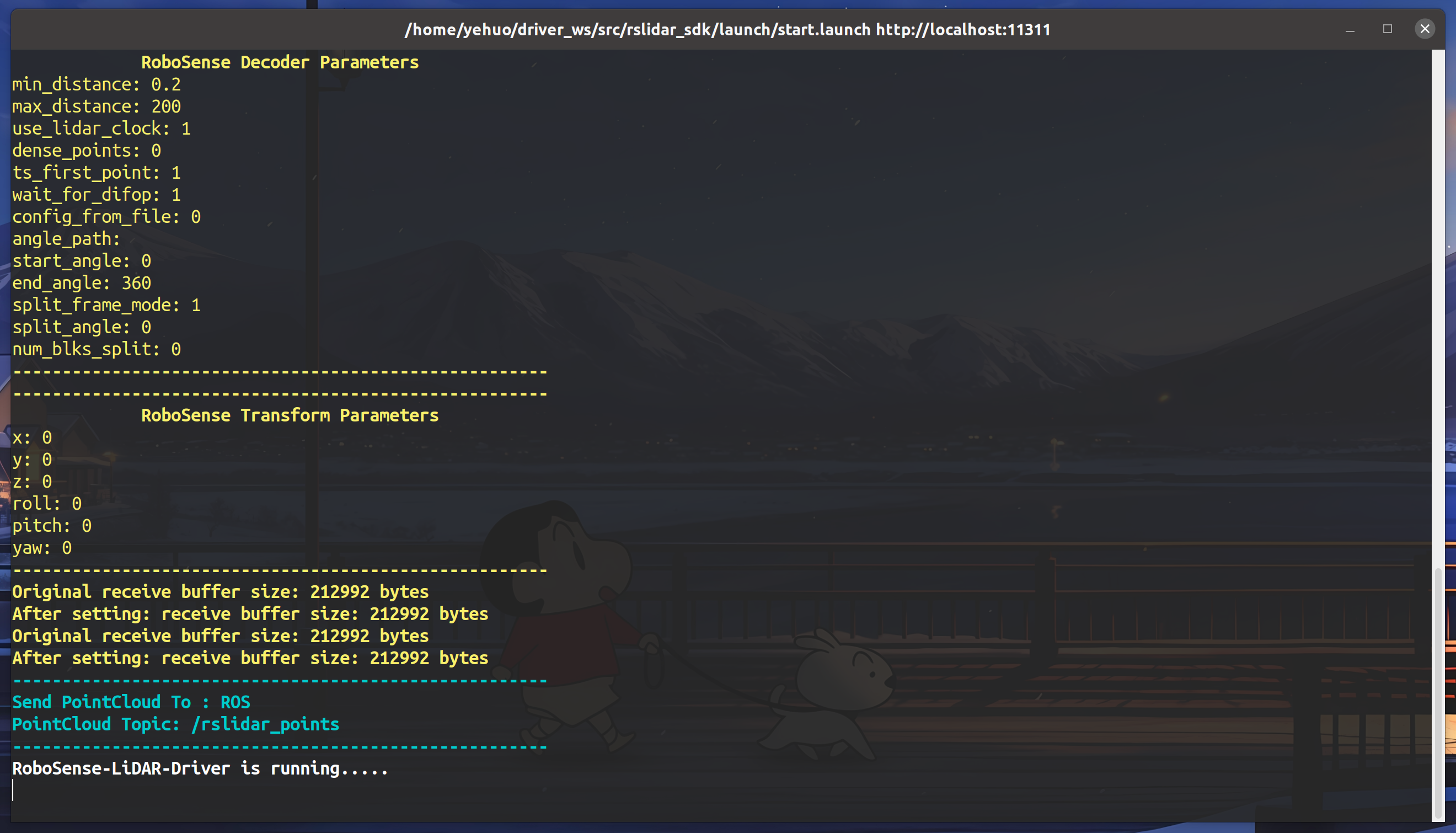
cd driver_ws
source devel/setup.bash
roslaunch rslidar_sdk start.launchTips:速腾雷达可以选择点的类型
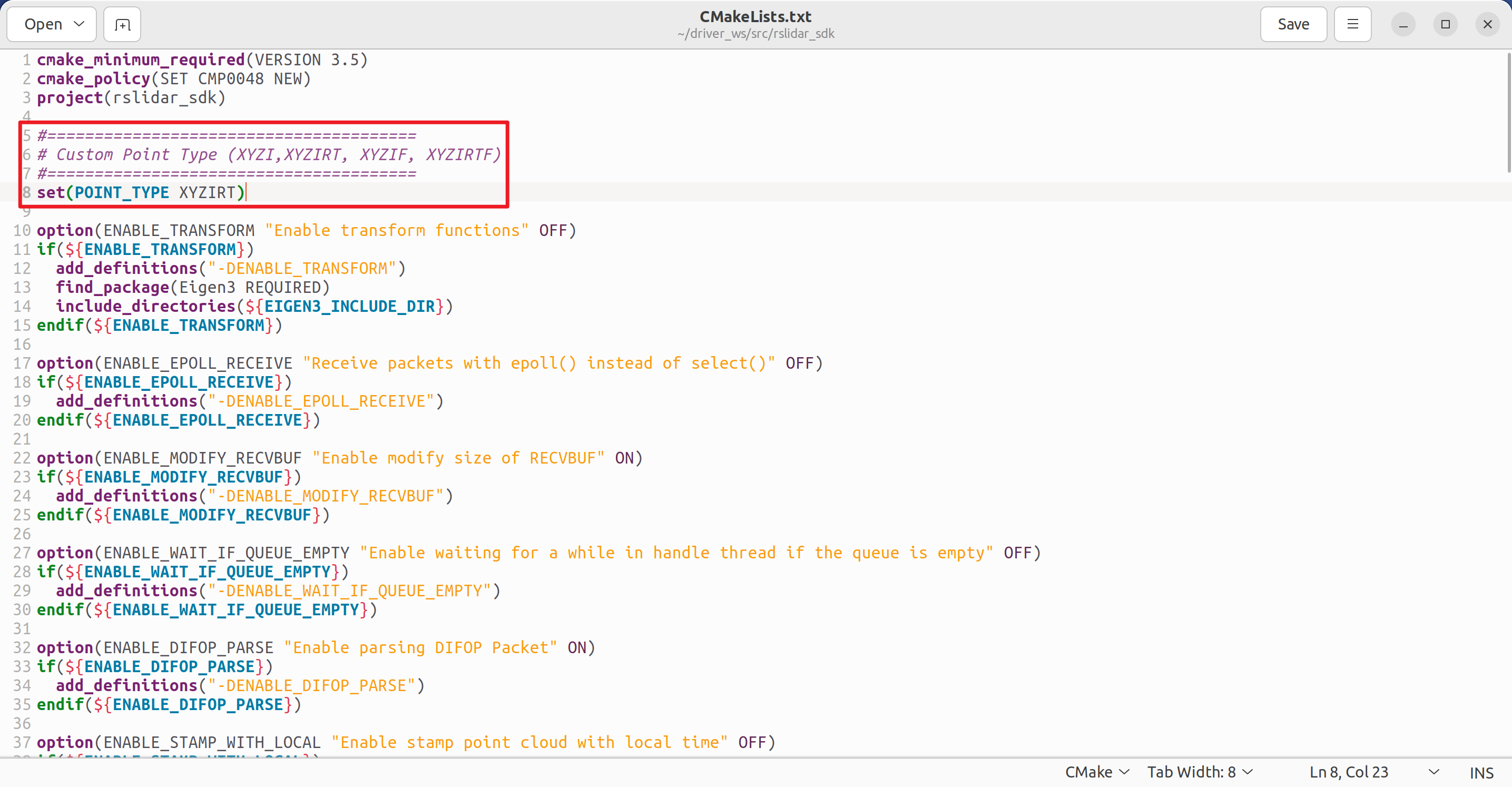
保存好之后,重新编译即可
测试 xsense mti 300
基于 MT软件套测试
1.安装依赖
安装 libdouble-conversion1
wget http://archive.debian.org/debian/pool/main/d/double-conversion/libdouble-conversion1_3.1.0-3_amd64.deb
sudo dpkg -i libdouble-conversion1_3.1.0-3_amd64.deb安装 libicu60
wget http://mirrors.kernel.org/ubuntu/pool/main/i/icu/libicu60_60.2-3ubuntu3.2_amd64.deb
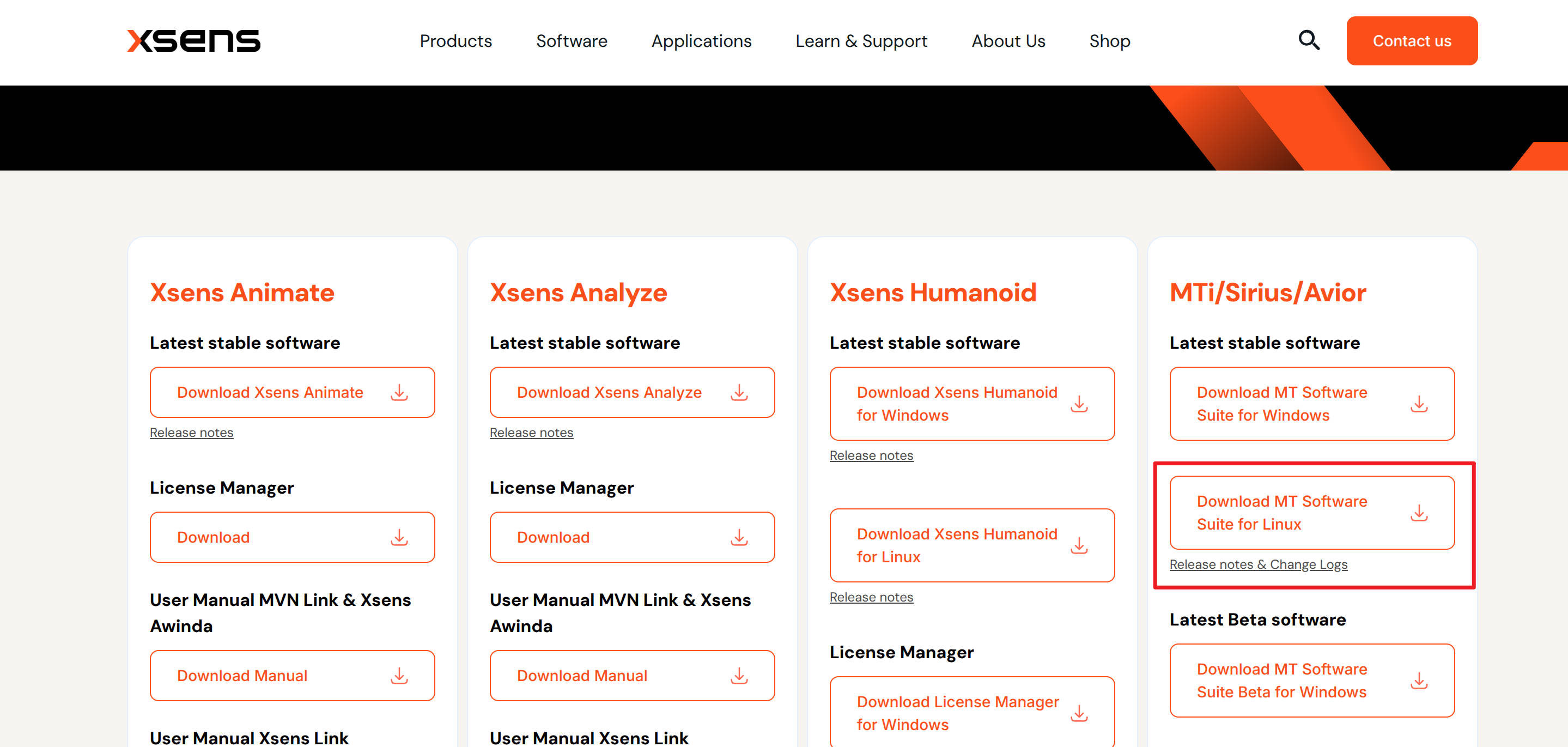
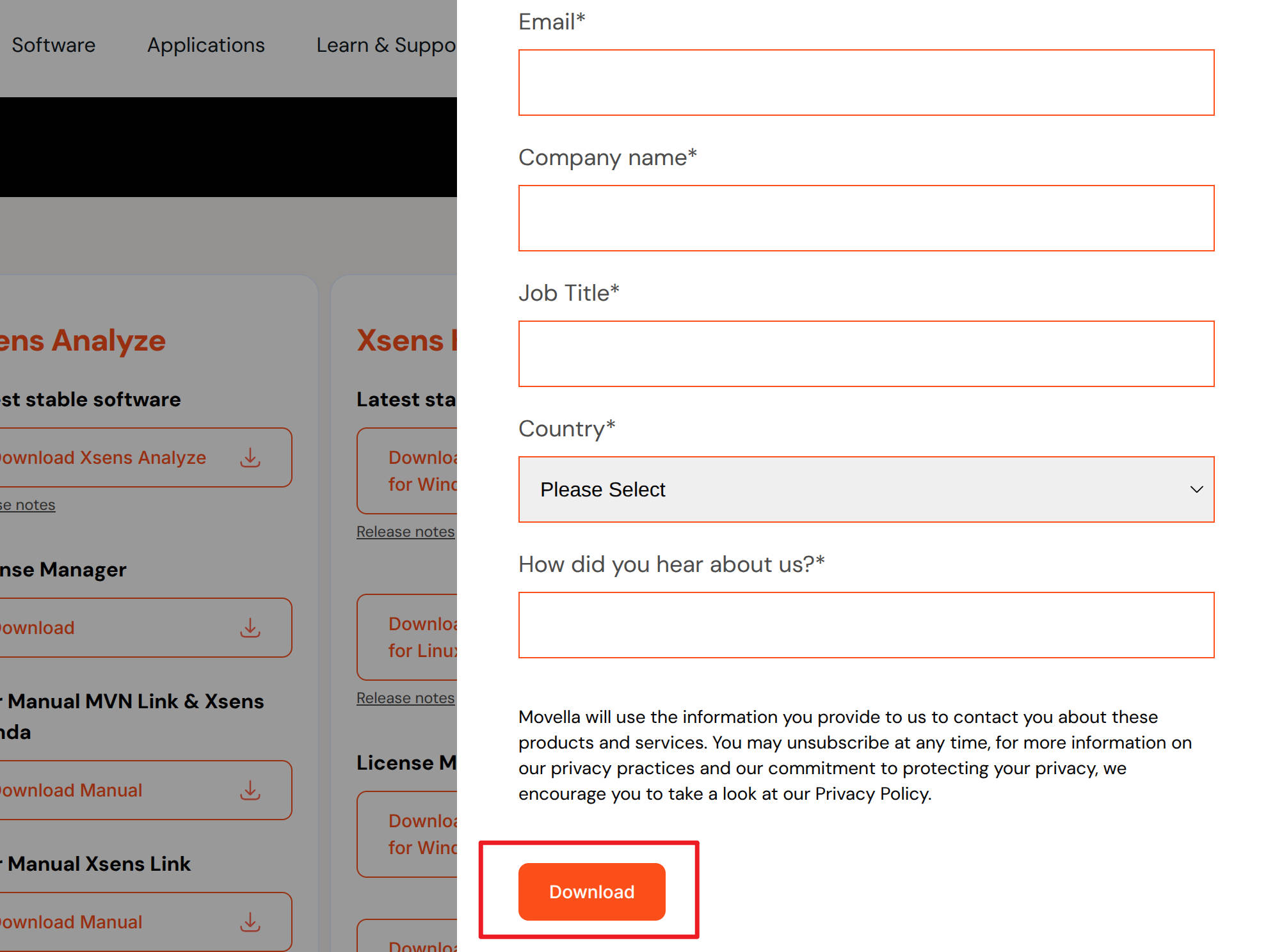
sudo dpkg -i libicu60_60.2-3ubuntu3.2_amd64.deb2.MT软件套下载
3.执行.sh文件
将刚才下载的压缩文件手动解压,并将一共有三个文件需要解压,大文件解压后,点进去还有两个文件需要解压,解压完后将压缩包删了节省内存。
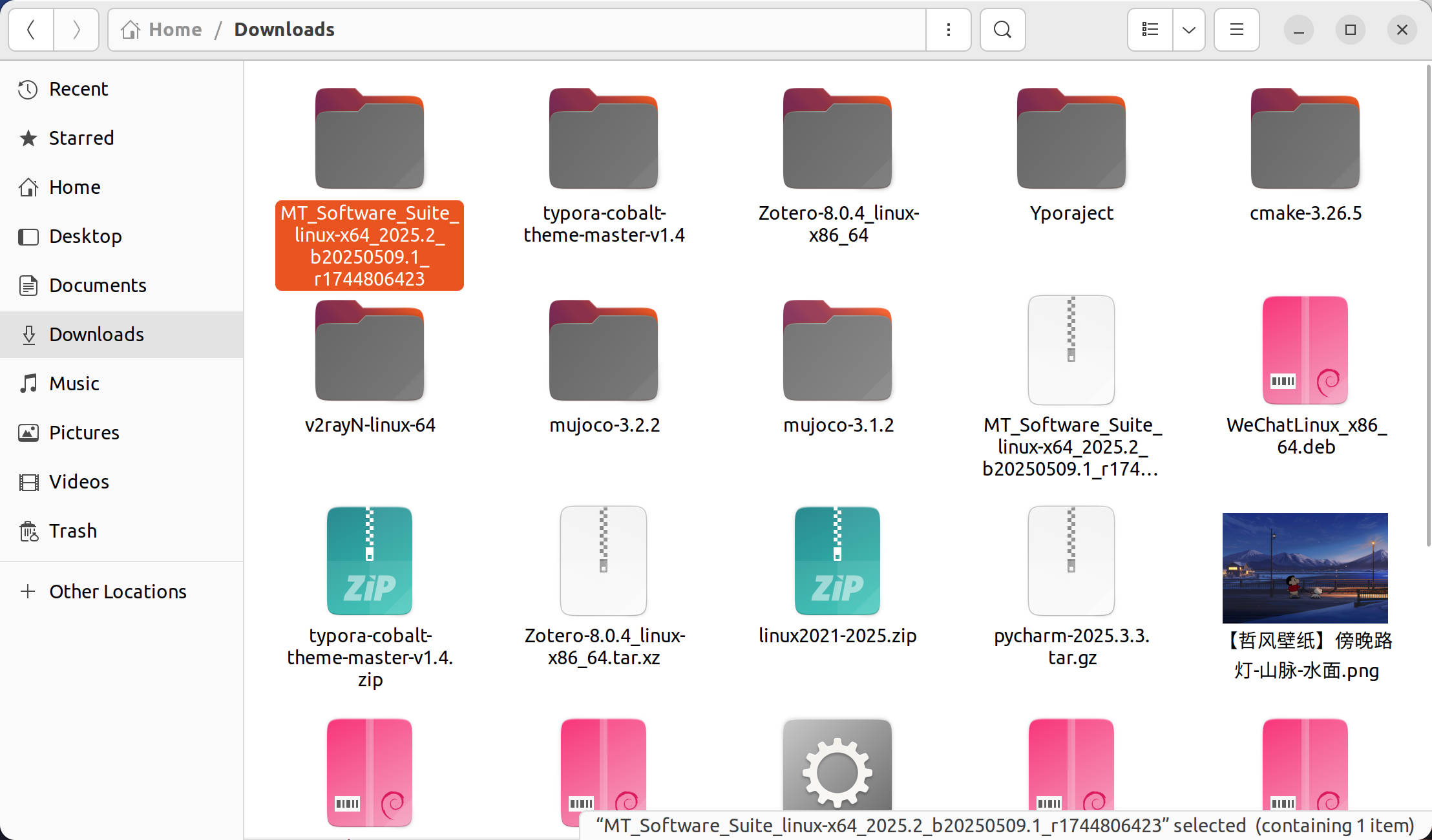
sudo ./mtsdk_linux-x64_2025.2.sh 若报错"uudecond",执行以下安装命令
sudo apt-get update -y
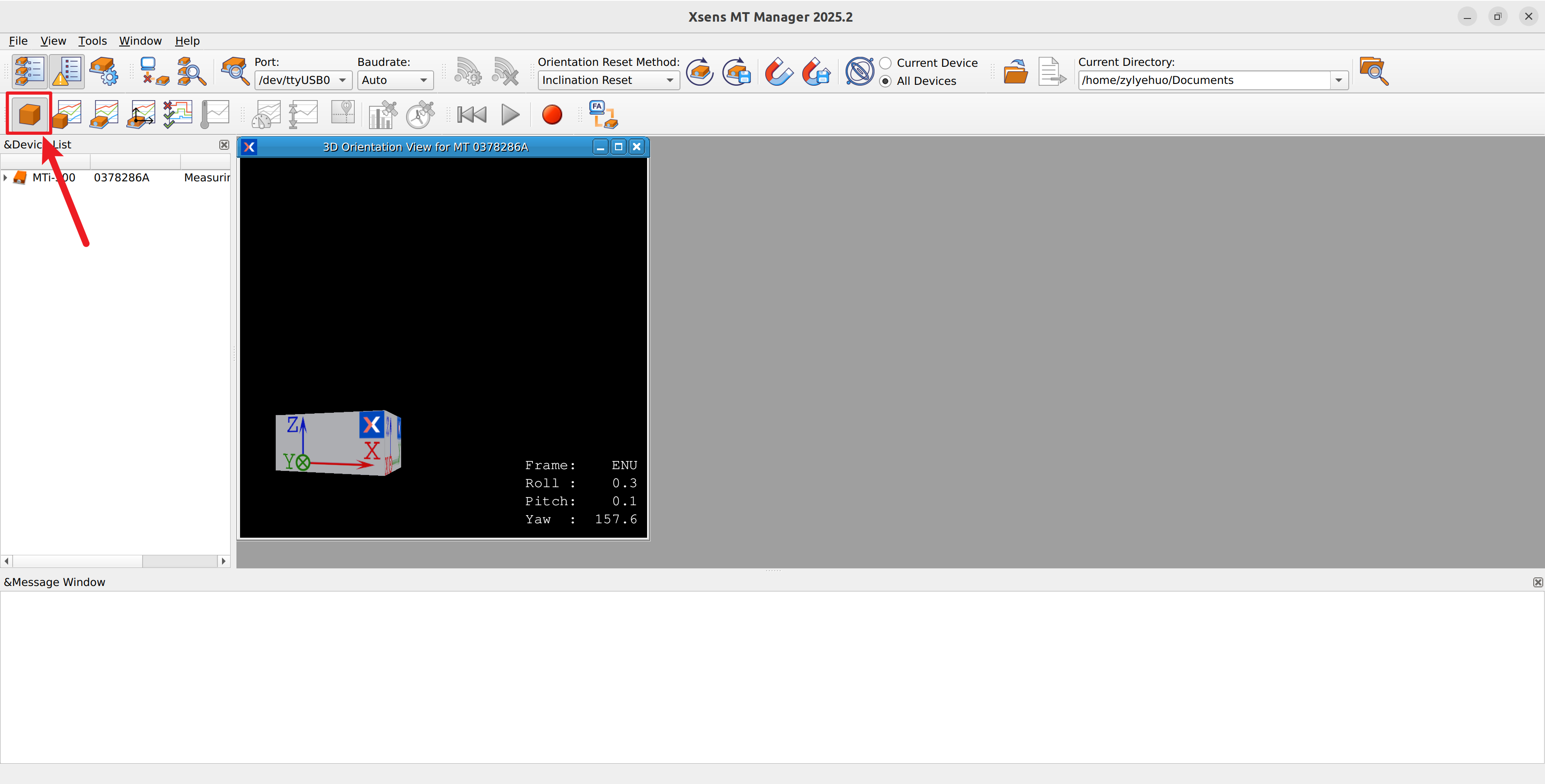
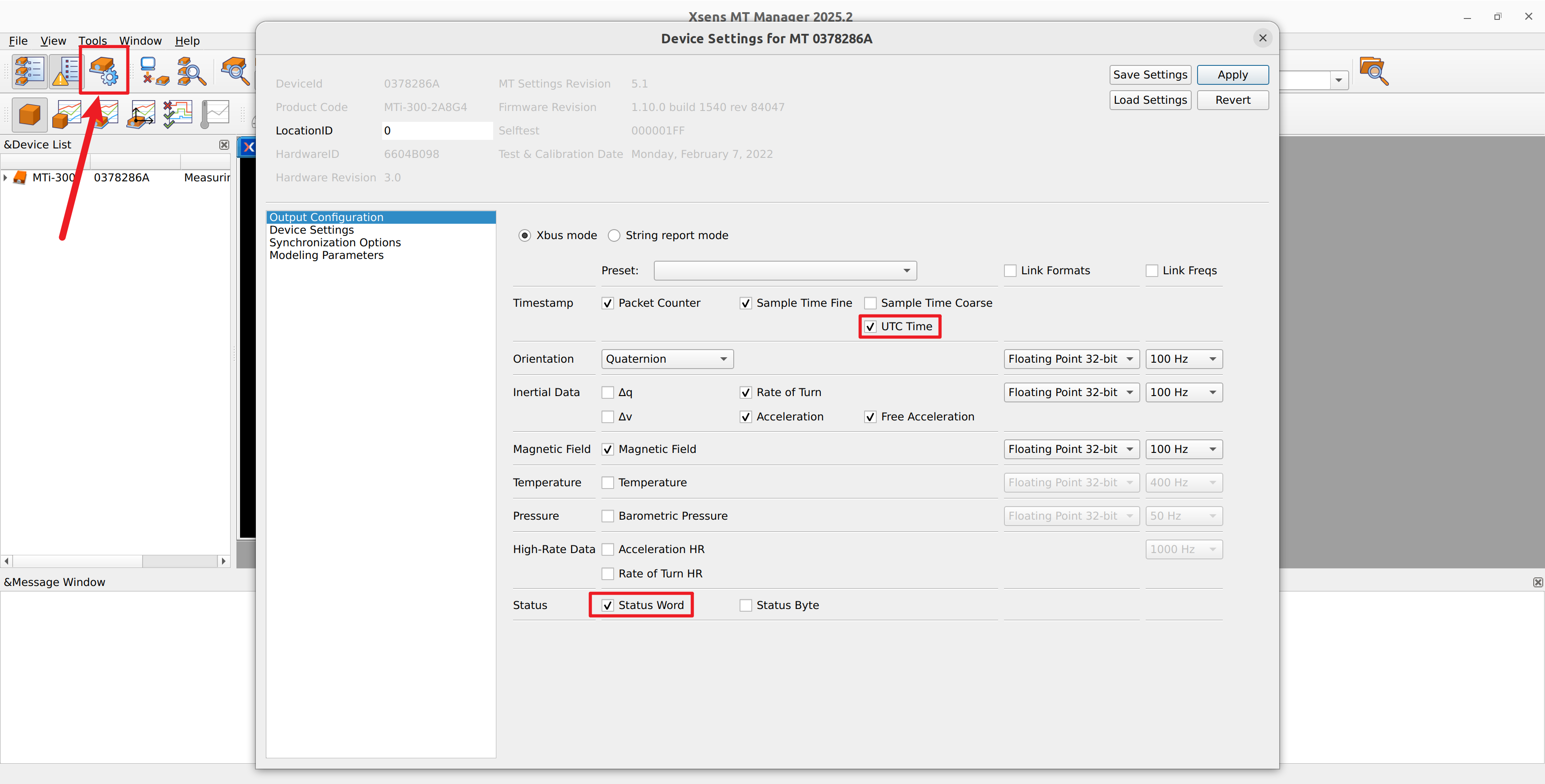
sudo apt-get install -y sharutils4.打开MT Manager界面
打开到以下路径的文件:
/home/yehuo/Downloads/MT_Software_Suite_linux-x64_2025.2_b20250509.1_r1744806423/MT_Software_Suite_linux-x64_2025.2/mtmanager_linux-x64_2025.2/mtmanager/linux-x64/bin
然后右键打开终端,执行如下命令
./mtmanager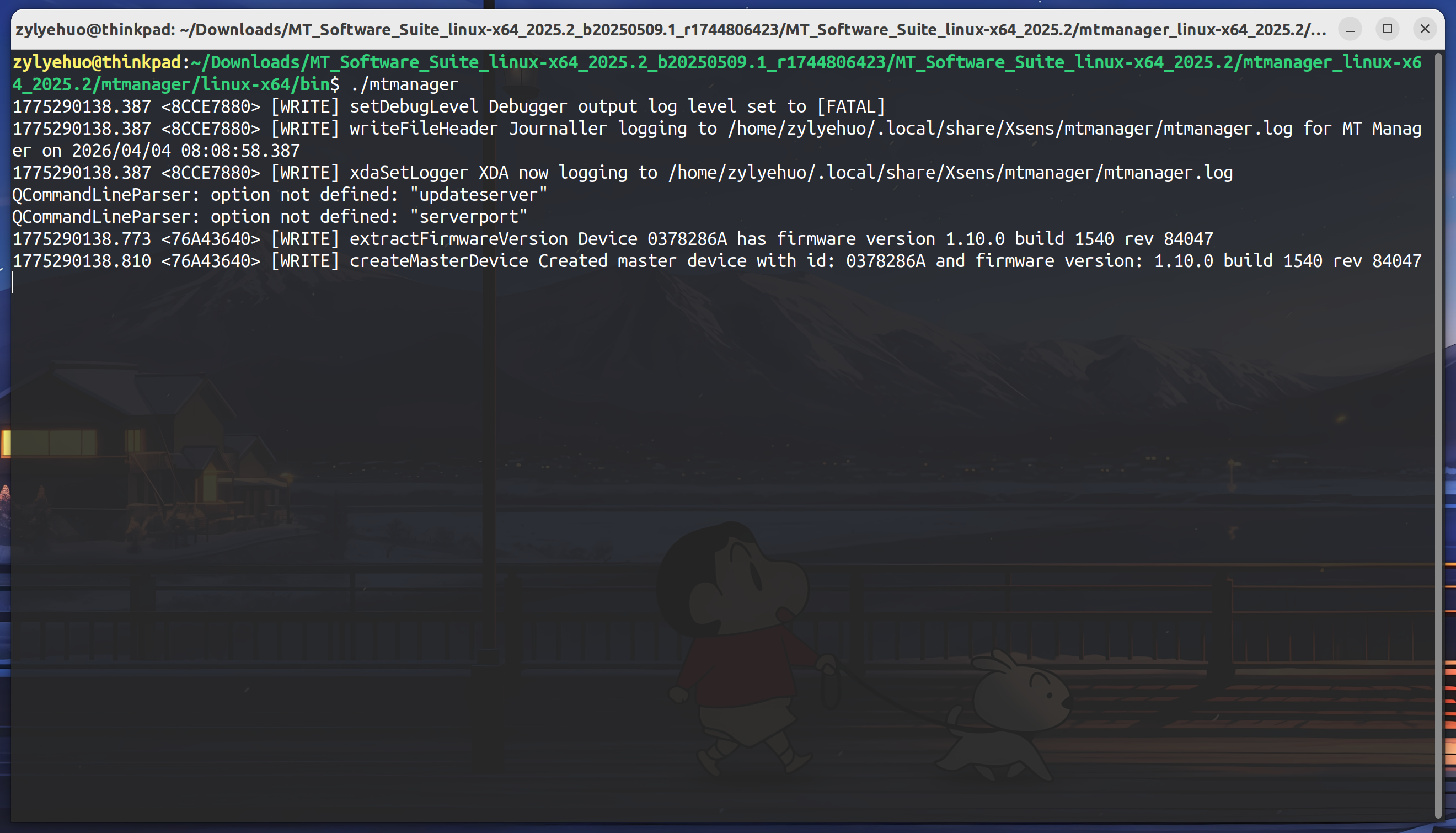
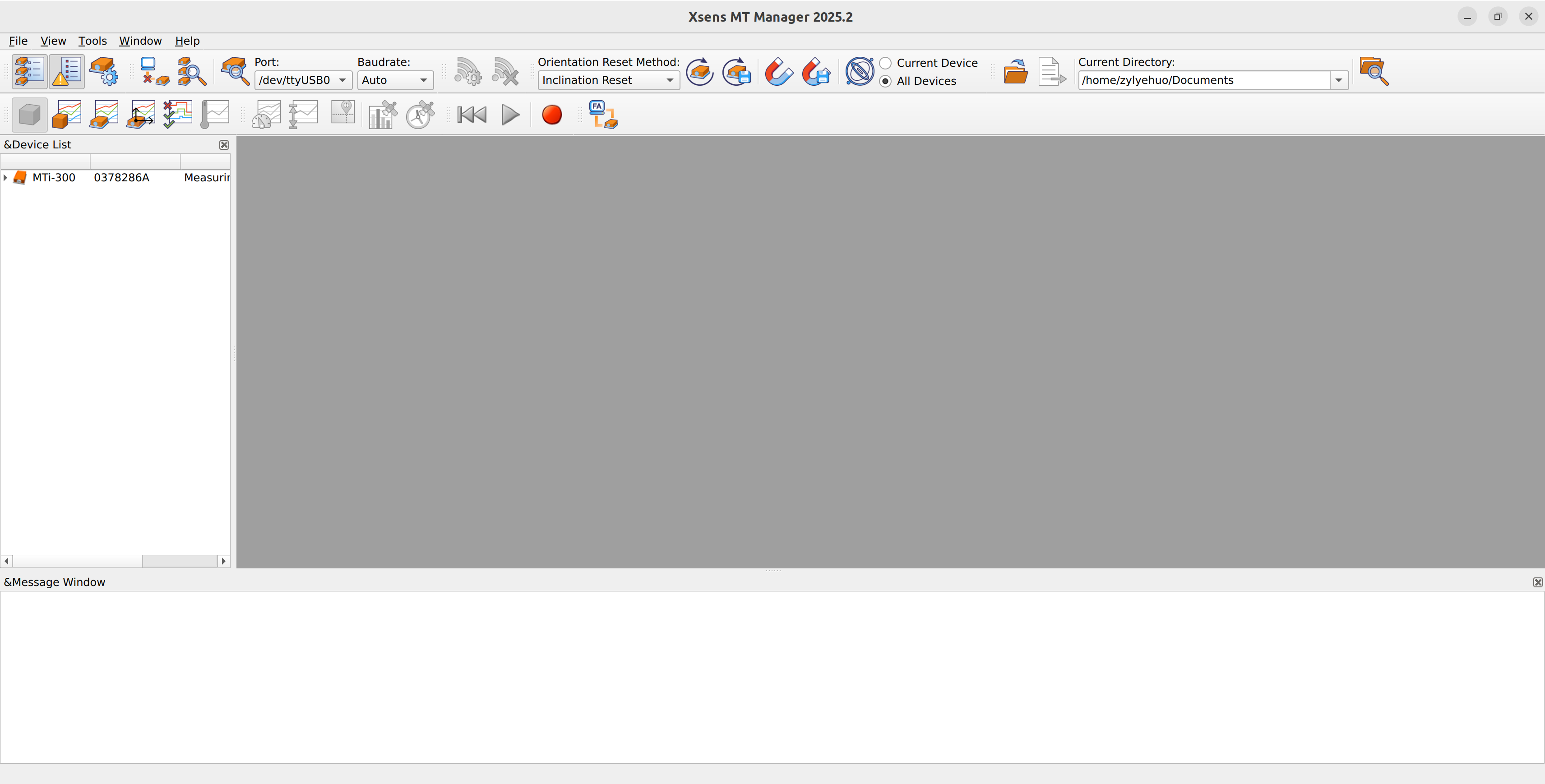
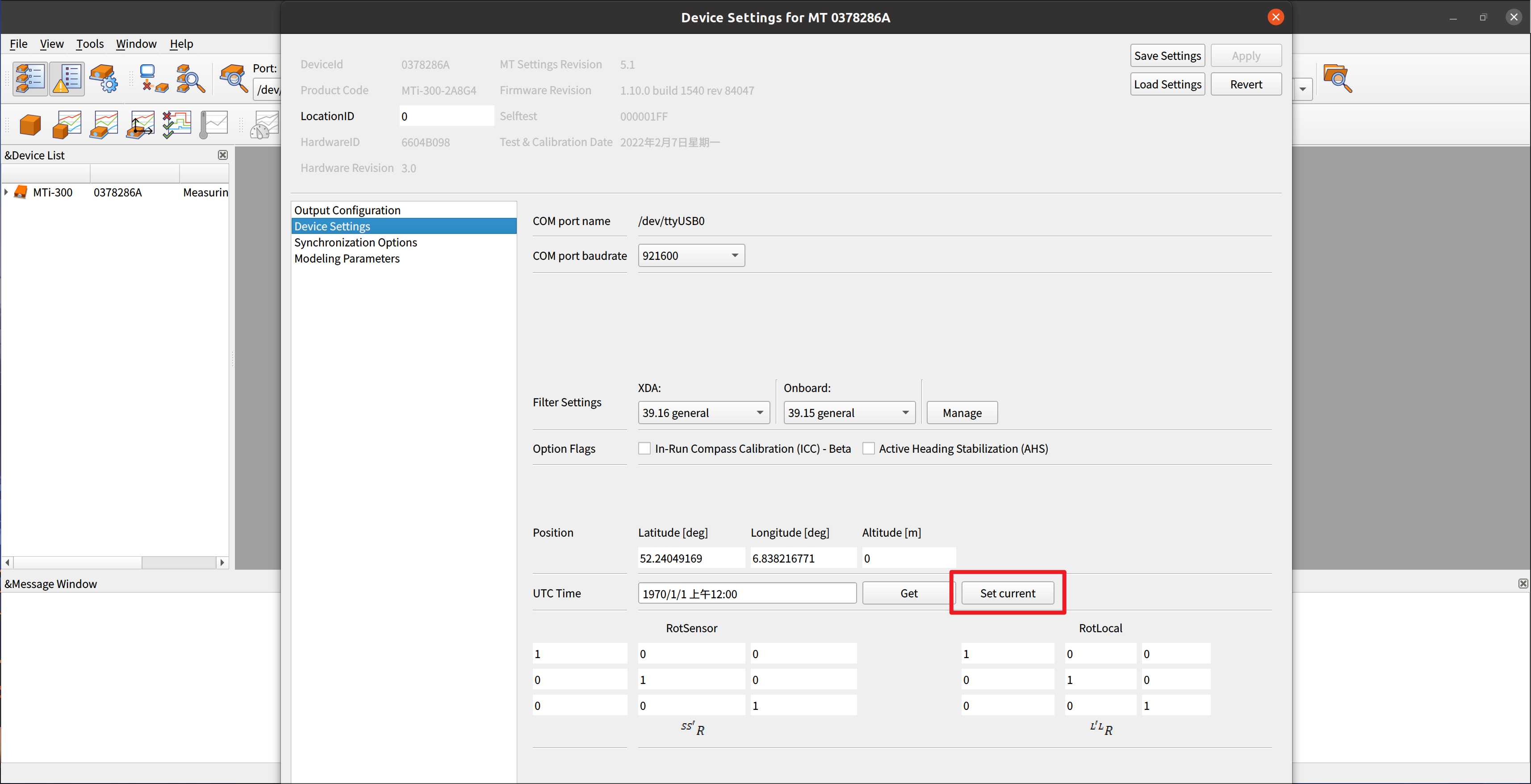
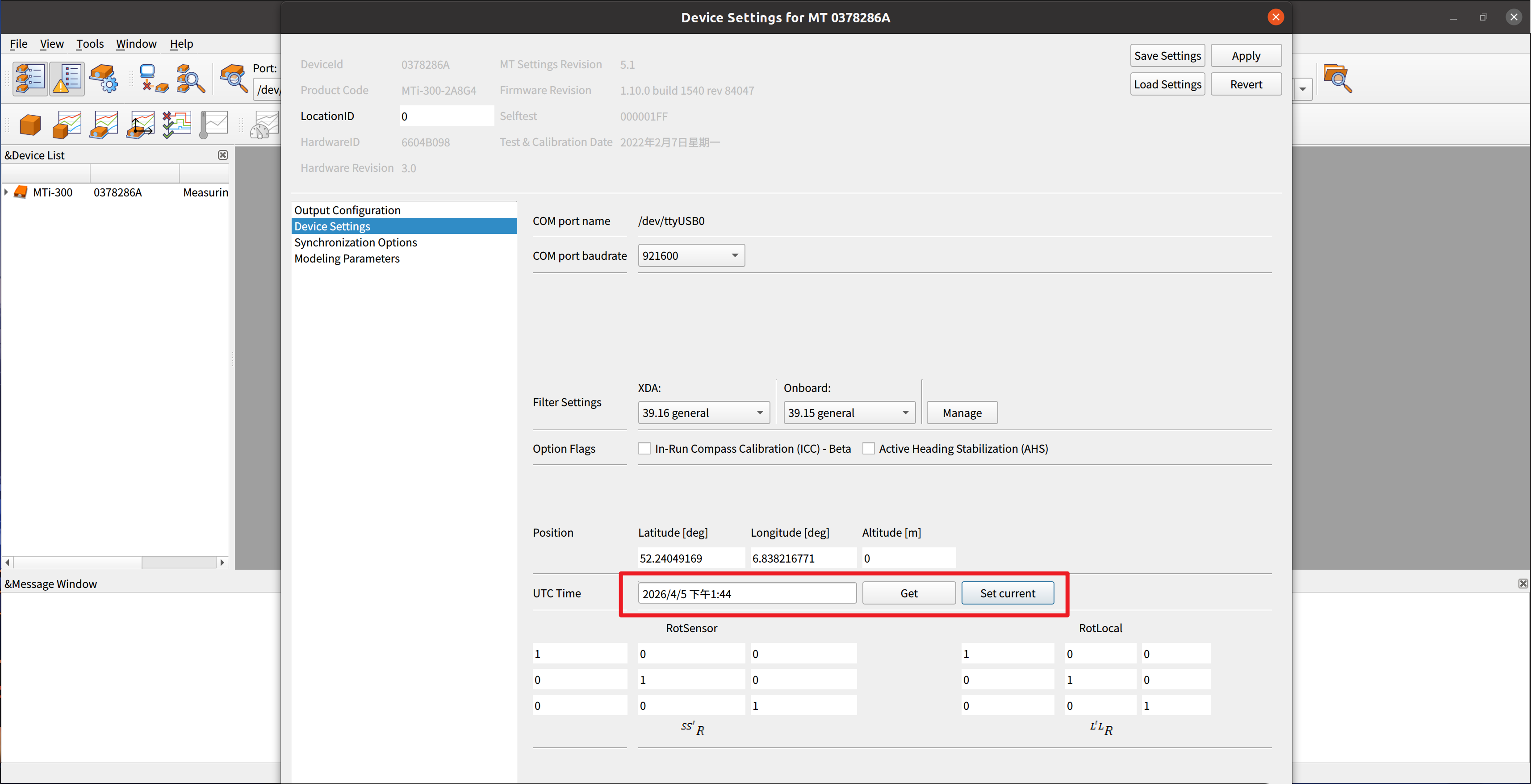
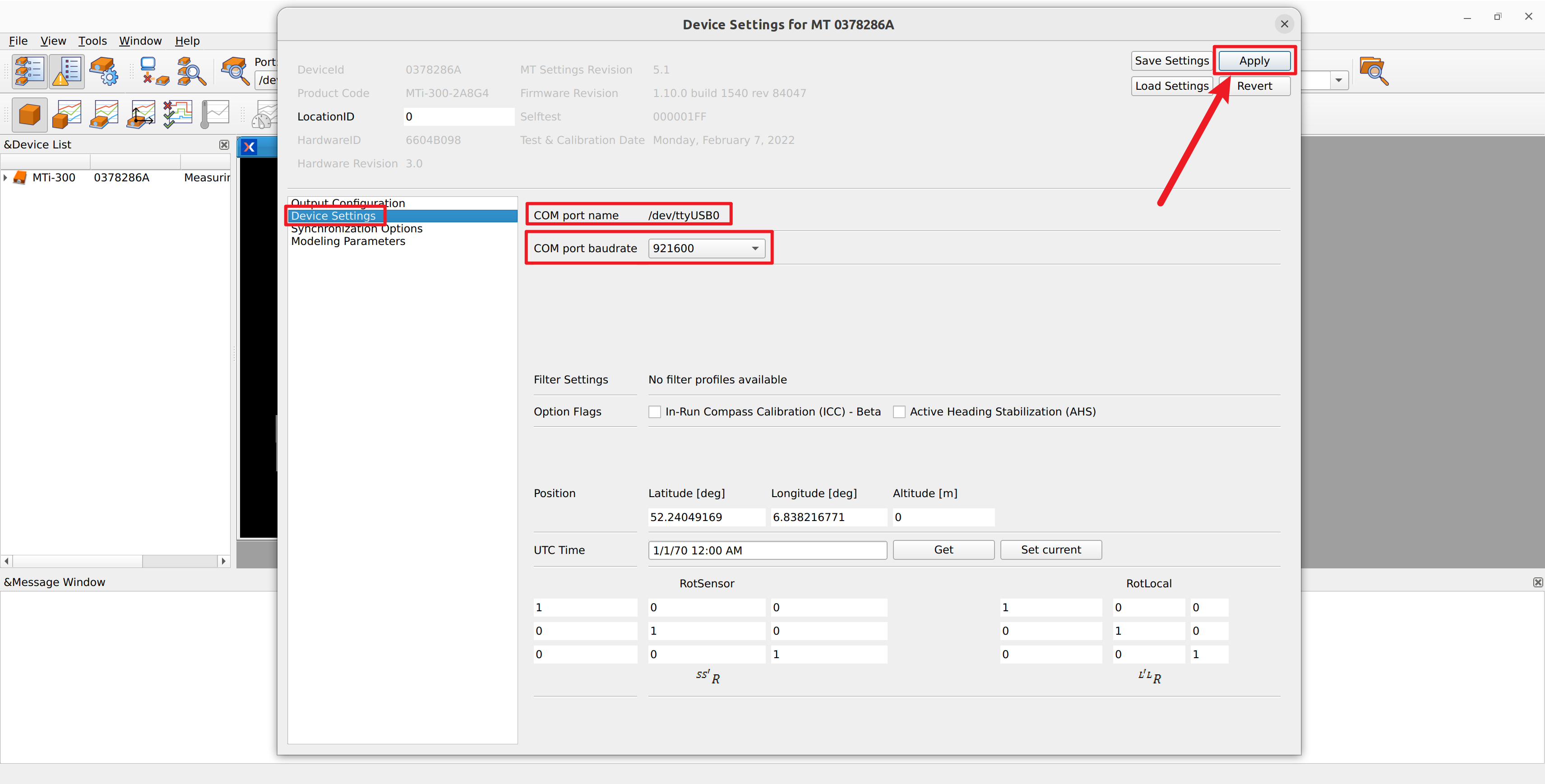
记住这步设置的波特率
运行 launch 文件测试 IMU 节点数据
lsusb看到Xscens ******