在智能语音交互、安防监控、机器人转向等场景中,声源定位 已成为实现 "听声辨位" 的核心技术。AR1106 模组以双麦阵列 + 本地命令词触发 + SG90舵机原生驱动为技术架构,在保持小体积、低成本的同时,实现稳定可靠的角度输出与实时联动,专为轻量化语音交互设备提供一站式寻向解决方案。
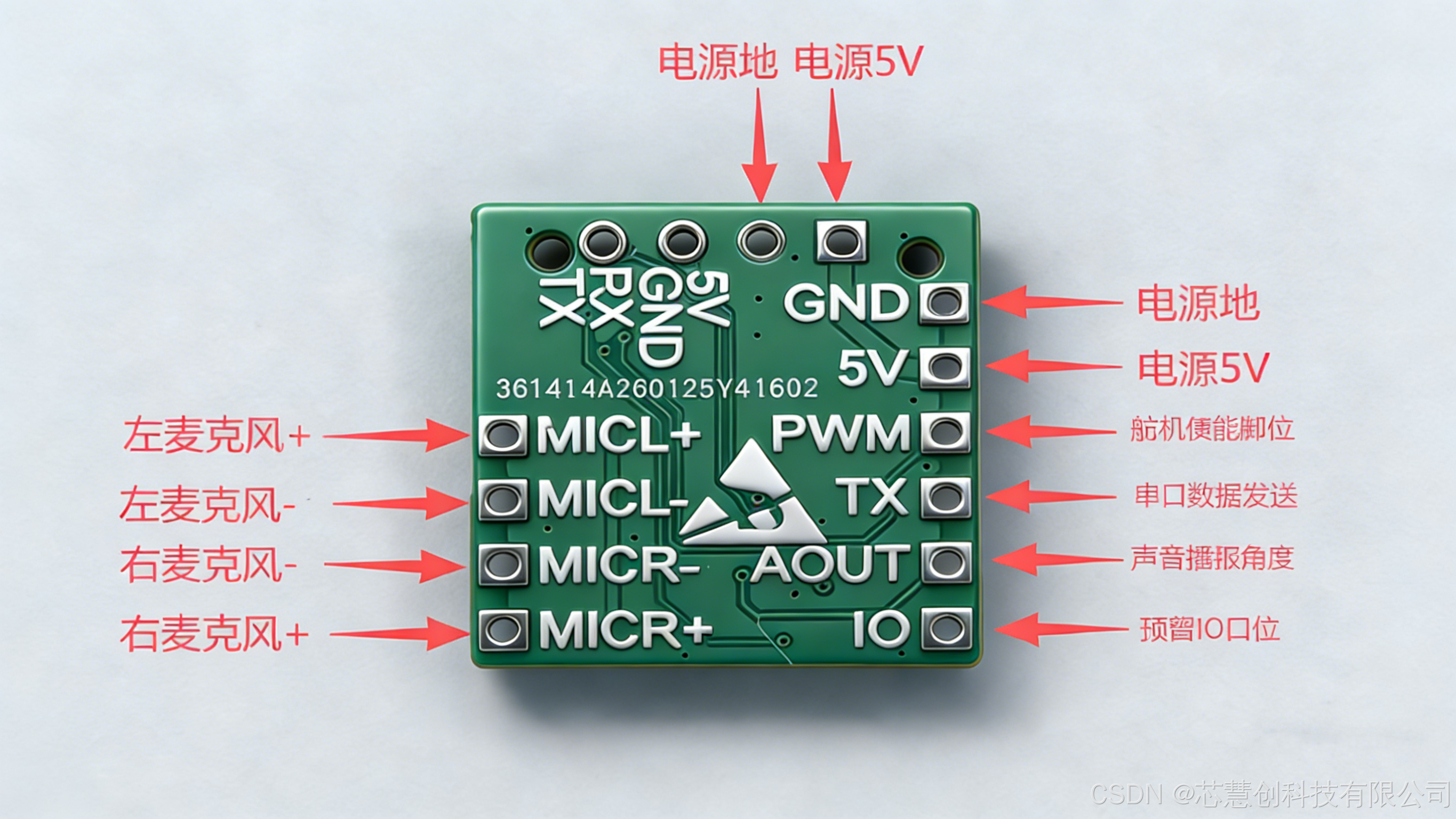
一、硬件架构与声学设计
AR1106 采用双麦克风极简阵列 ,两颗拾音单元间距经工程优化至约4cm ,在抑制通道间串扰与相位干涉的同时,为TDOA 时延差算法提供稳定的空间采样基础。
- 硬件结构:无冗余元件,高集成度布局,便于嵌入智能玩具、云台、音箱等小型终端
- 供电与接口:宽压输入,标准串口 (UART) 透传,支持直连单片机 / PLC / 主控板
- 麦克风类型:适配高信噪比 MEMS 模拟 / 数字咪头,保证远场拾音稳定性
该设计摒弃多麦阵列的复杂布线,以算法优化替代硬件堆叠,在成本与体积上具备明显优势。
二、核心技术指标与定位性能
AR1106 以命令词触发定位为技术特色,仅对有效指令响应,从源头降低环境误触发,实测性能如下:
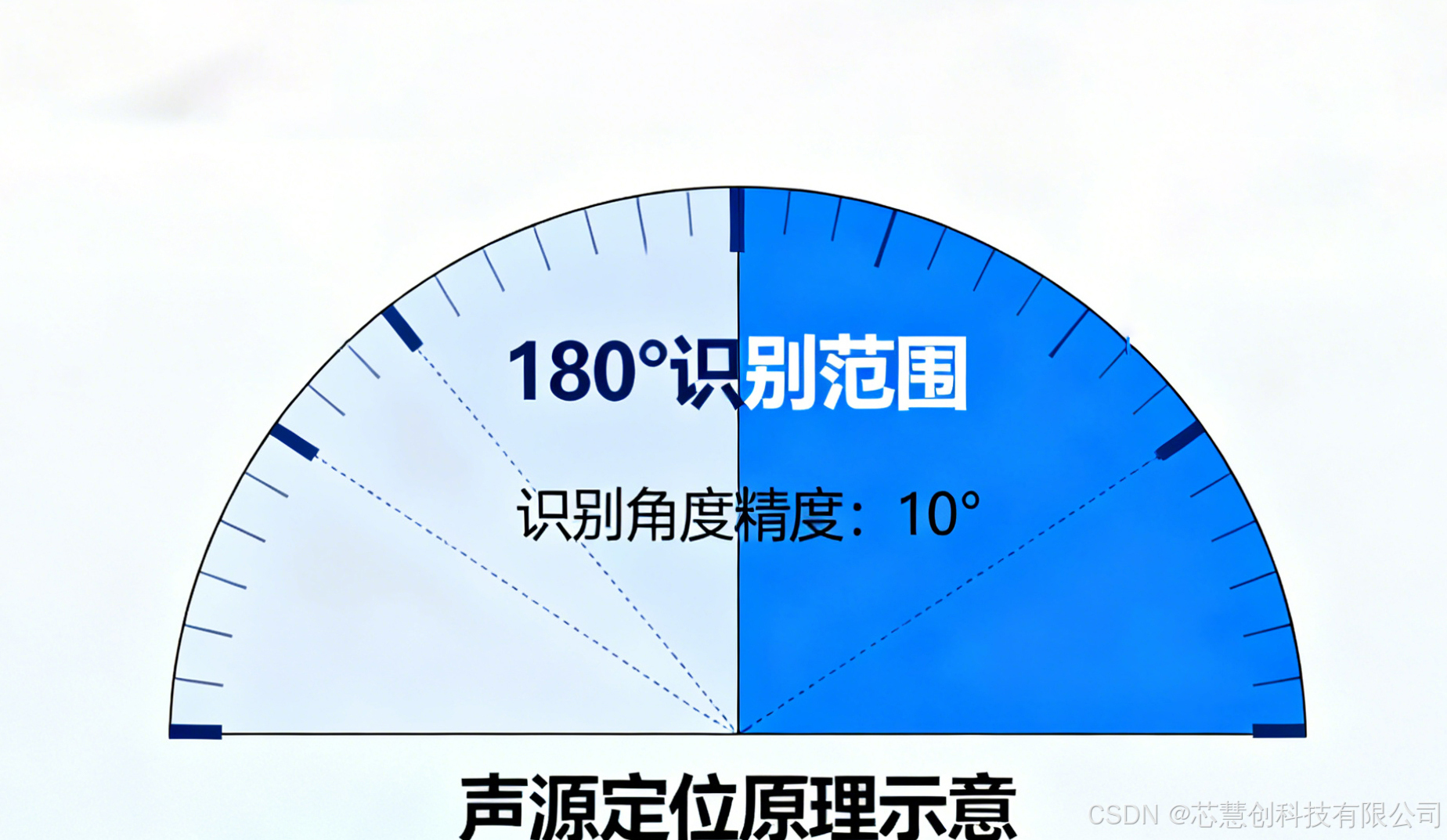
- 定位范围:正面 **180°** 连续覆盖,无明显检测盲区,适配桌面 / 近场交互场景
- 定位精度:典型值 **±10°**,可稳定区分相邻 10° 声源角度,满足常规跟随控制需求
- 拾音距离 :0.3--5m有效识别,5 米内命令词可稳定触发定位,超出后灵敏度可控下降
- 抗干扰机制:本地命令词白名单,过滤环境噪音、无关人声、背景音乐等干扰,复杂场景不误触发
模组内部集成DSP 实时音频预处理,包含 AGC 自动增益、降噪、回声抑制预处理,为定位算法提供干净人声特征,提升远距离与弱信噪比下的角度一致性。
三、舵机联动与控制逻辑(技术亮点)
AR1106 内置SG90 等常规舵机驱动逻辑 ,无需二次开发驱动代码、无需调试 PWM 参数,实现即插即用式联动:
- 角度映射:声源角度→舵机转角直接换算,响应延迟低
- 动态跟随:声源移动时,角度实时刷新输出,舵机平稳追踪
- 参数可调:支持限定转角范围、调整转速与死区,适配不同结构云台
- 远距离稳定性:5 米极限距离触发,角度输出无明显漂移,联动无卡顿、无错转
该架构大幅降低开发门槛,支持学生、创客与工程师快速完成 "语音控转向" 原型验证。
声源定位模组AR1106让小智机器人听声辨位
四、串口数据协议与系统集成
模组通过标准串口输出结构化定位信息,格式简洁、便于主控解析:
- 输出字段:有效命令词标识、声源角度值 (0--180°)、拾音强度、状态位
- 输出机制:仅在有效命令词触发时发送,避免无效数据干扰系统
- 接口兼容性:3.3V/5V 电平兼容,直连 STM32、Arduino、树莓派等主流平台
- 典型应用:串口数据驱动摄像头云台、语音机器人头部转向、互动装置寻呼响应
设备可快速对接监控、展示、教育互动等系统,实现声源→角度→执行机构的全链路自动化。
五、技术优势与适用场景
核心技术优势
- 双麦极简方案:体积小、易布板、BOM 成本可控
- 命令词本地触发:抗干扰强、隐私安全、无云端依赖
- 原生舵机驱动:免开发、快验证、落地周期短
- 10° 精度 + 5 米拾音:覆盖多数民用与轻工业场景
典型应用场景
- 智能交互:语音机器人、教育玩具、AI 助手头部转向
- 简易安防:声源追踪摄像头、区域人声预警云台
- 工业监测:设备异响定点、本地语音唤启监测终端
- 会议与展示:自动拾音麦位、互动艺术装置寻向控制
六、总结
AR1106 声源定位模组以双麦硬件 + TDOA 算法 + 命令词触发 + 舵机原生驱动 为技术主线,在轻量化、低成本与实用性之间取得平衡。其180° 覆盖、10° 精度、5 米拾音、强抗干扰、即插即用的特性,使其成为普通精度要求下,语音寻向与舵机联动的高性价比方案,适合批量集成与快速开发。