1.图新AR视频融合产品简介
图新 AR 视频融合产品可快速实现 CAD 等矢量数据与无人机航拍视频的精准叠加,精准解决施工项目部对项目路线定期航拍、叠加 CAD 数据后完成汇报的核心诉求。
本产品依托图新自研的空间三维运算能力,根据 CAD 数据的空间坐标,结合无人机航拍视频自带的 GPS 信息与相机姿态,将 CAD 矢量数据直接叠加渲染至视频的每一帧画面。相较于传统视频融合模式,本产品具备四大核心优势:
Ø 处理速度极快:传统模式需一周完成的工作量,本产品半天即可高效交付
Ø 无需多软件协同:摒弃 AE、CAD、剪映等多款软件的繁琐操作,一键即可完成全部融合流程
Ø 操作简单易上手:无需具备专业视频处理能力,只需准备好航拍视频与矢量数据,全程自动化处理,新手也能快速掌握
Ø 地理标绘免追踪:若需在视频中标记公里桩、项目位置等信息,无需在视频编辑软件中配置复杂的追踪效果,直接在图新说中添加标注即可,且支持标注样式自定义调整
CAD叠加无人机航拍视频,一键精准融合
2.操作指南
2.1工作原理及界面布局说明
工作原理:
无人机航测视频会记录画面中每一帧的空间位置与相机姿态,CAD 等矢量数据经投影信息配置后,具备精准的空间位置信息。图新专属三维渲染引擎可根据视频每一帧的拍摄视角,对矢量数据进行针对性渲染,从而实现矢量数据与视频每一帧画面的精准匹配叠加。
无人机航拍过程中,GPS 信息存在轻微误差,且受动力惯性、风力等因素影响,相机姿态会出现小幅偏差,这会导致矢量数据渲染结果与无人机画面叠加时产生轻微抖动。针对该问题,可通过对无人机画面进行空三计算优化,得到平差后的相机位置与姿态,以此校准视频画面,解决抖动问题。
CAD 等矢量数据在空间渲染时,仅当数据高程与地面完全吻合时,指定视角的渲染画面才能与视频画面精准匹配;若高程不匹配,会出现透视效果,造成叠加偏差。针对该问题,可通过叠加正确的地形数据,对矢量要素进行高程校准,实现精准融合。
界面布局:
软件操作界面可划分为 4 个功能区域,各区域职责明确、操作便捷:
· 区域 1:顶部标题栏:实现软件窗口最大化、最小化、关闭操作,同时实时显示当前工程名称
· 区域 2:菜单栏:包含软件核心功能菜单(文件、工具、帮助)及成果导出按钮,是功能操作的核心入口
· 区域 3:侧栏:集成三大功能模块,分别为无人机航拍视频管理、矢量叠加层管理、操作日志,便于数据管理与操作追溯
· 区域 4:渲染控制区:核心实现无人机航测视频与矢量要素的叠加渲染,同时支持视频预览、渲染效果实时查看

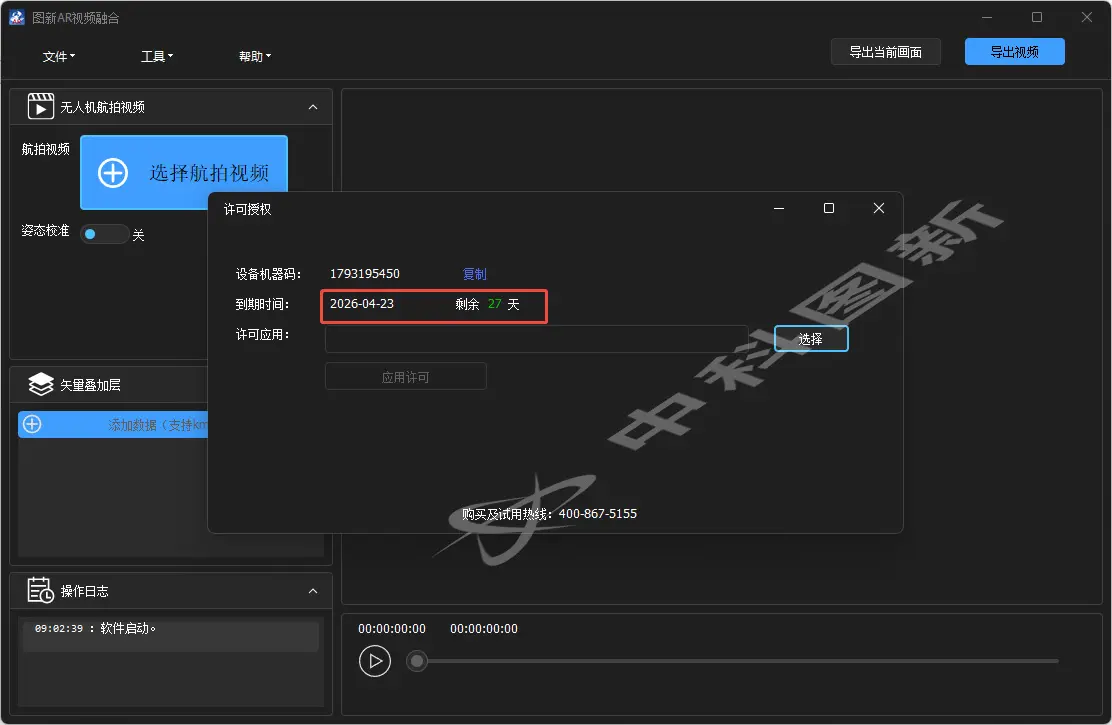
2.2软件启动及许可配置
·软件初次启动时,会弹出许可授权提示,用户需插入硬件狗,或向工作人员发送设备机器码申请授权文件
·授权文件为 lic 格式,若已获取授权文件,直接点击【选择】按钮完成配置,配置后可查看授权有效时间
·后续若需更换许可或查看授权到期时间,可通过【帮助】菜单下的【许可授权】面板进行操作

2.3选择视频
软件操作的第一步为选择待叠加渲染的无人机航拍视频文件,该视频必须包含姿态信息,无姿态信息将无法进行后续融合处理
选择视频后,软件会在右侧区域自动显示视频画面,底部控制区将展示视频核心参数(时长、分辨率、帧率、体积等),同时可通过底部控制栏完成视频播放、暂停、画面跳转等操作

2.4选择矢量叠加文件
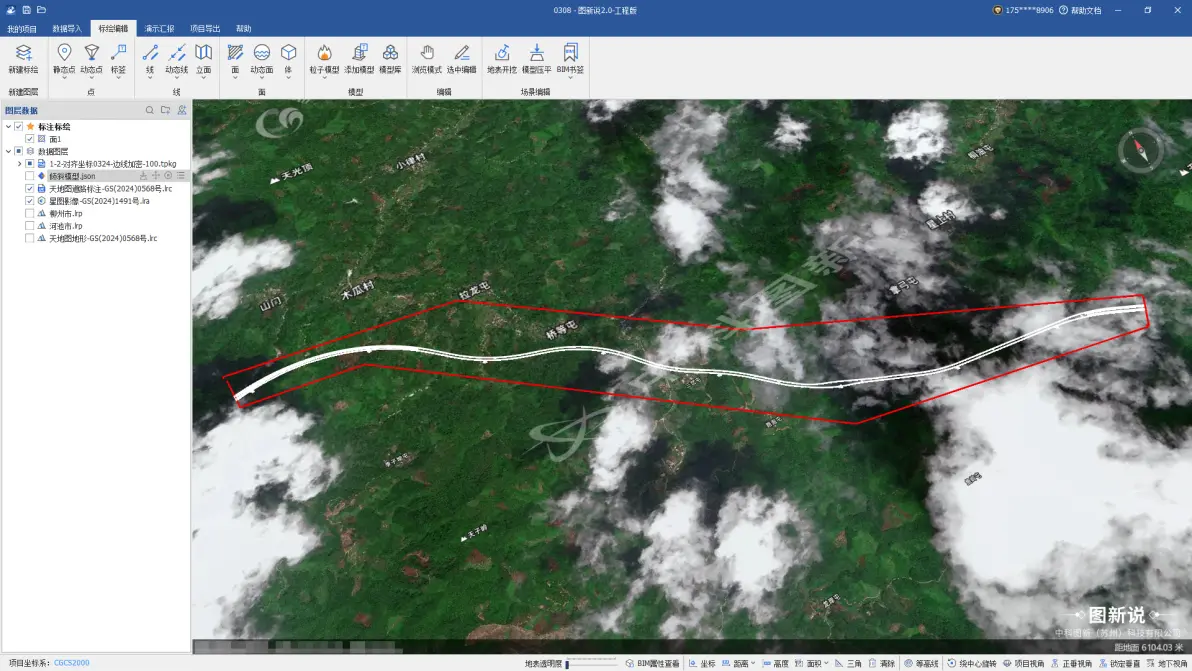
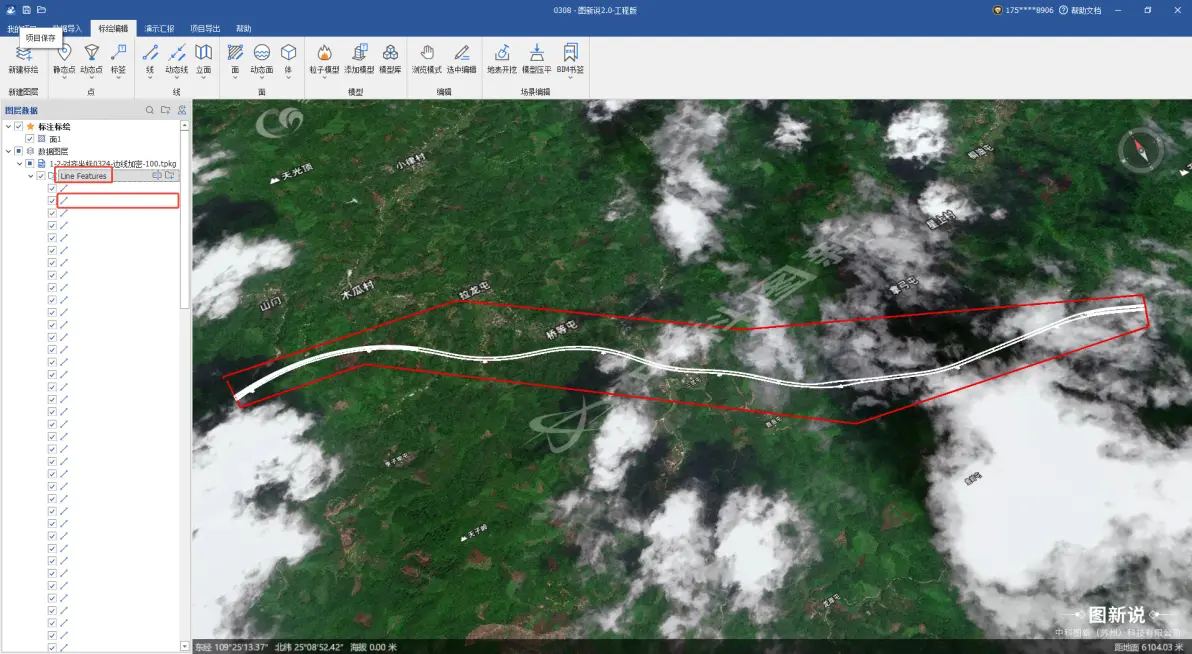
Ø 本产品支持选择在图新说中完成配置的道路边线、项目轮廓线等 tpkg 格式矢量文件
Ø 若 tpkg 文件中的线条高程均为 0,会导致矢量数据与视频画面叠加出现偏差,可通过后续校准步骤实现精准匹配
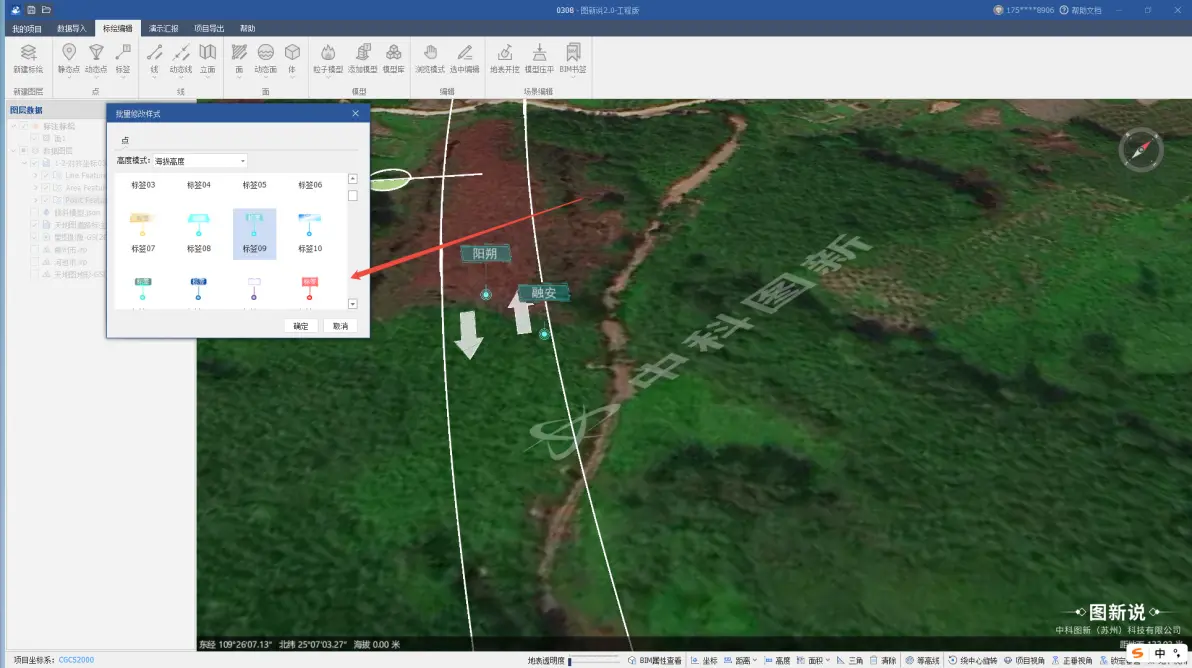
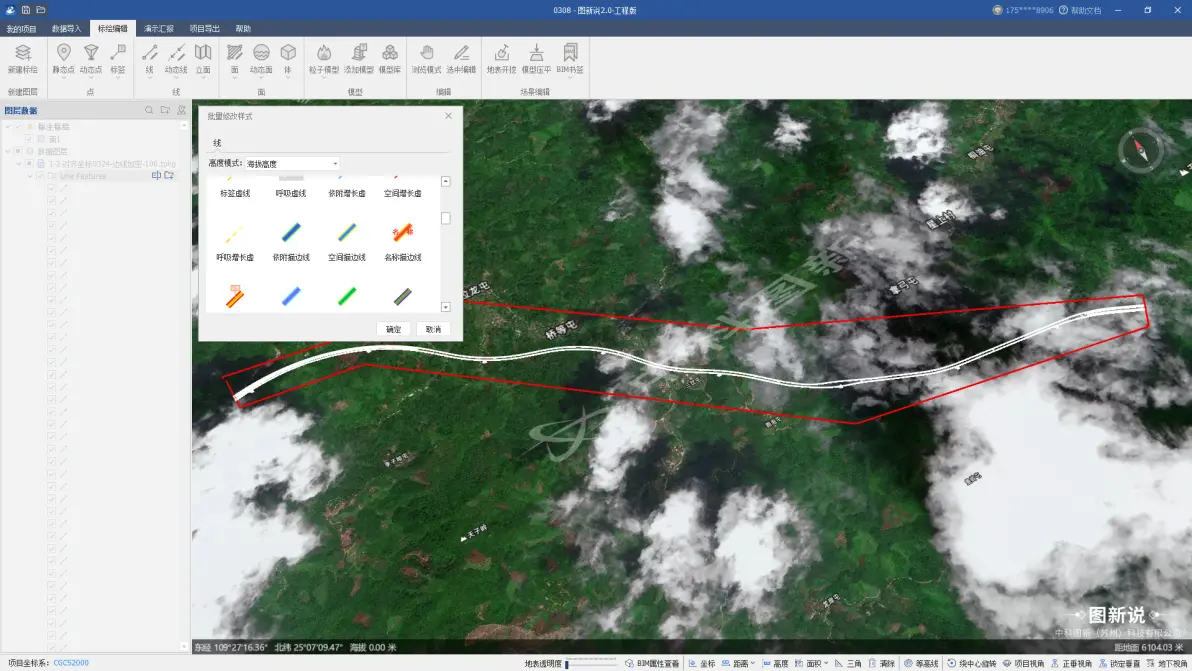
注意:矢量文件建议在图新说中完成两项核心配置 ------ 将空间模式设置为海拔高度,同时自定义样式风格(重点调整线条的粗细与颜色)

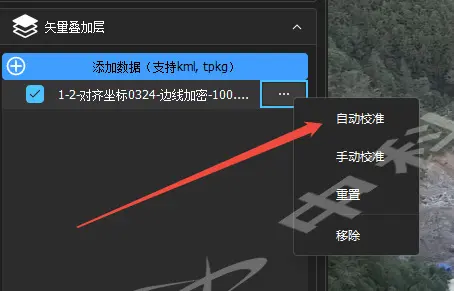
2.5矢量校准
在侧栏的矢量叠加层管理模块中,右键选中需校准的矢量文件
点击【自动校准】,完成后即可实现矢量数据与视频画面的精准叠加


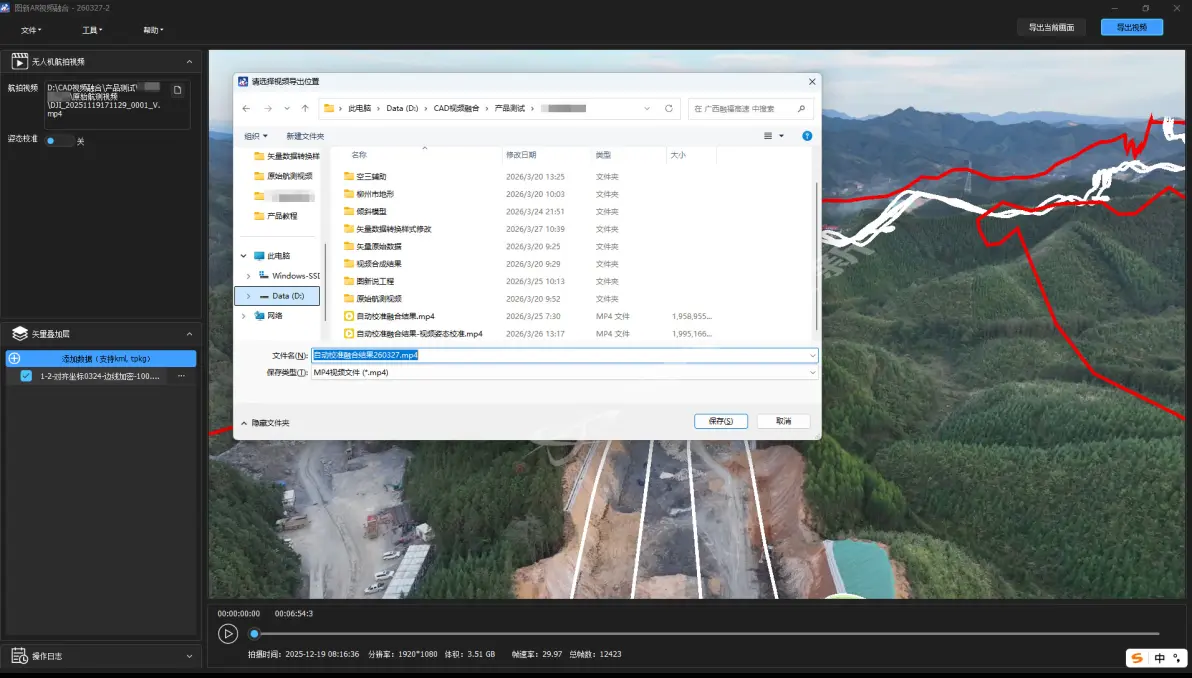
2.6导出视频
软件右上角配备 2 个导出按钮,功能与使用场景区分明确,操作步骤如下:
1. 预览导出:若为 4K 视频,可先导出当前画面进行预览,确认叠加效果是否满足使用需求
2. 完整导出:预览效果无误后,点击【导出视频】按钮,输出矢量与视频叠加渲染后的完整视频
o 点击导出后,首先选择视频存储目录
o 确认目录后开始导出,导出过程为逐帧渲染,渲染效率因显卡配置略有差异,整体导出时长约为视频原时长的 10 倍
-
导出完成后,可直接用视频播放器打开查看效果;也可借助剪映等视频编辑软件进行后期处理(如快进、添加字幕等)
-
若播放时发现矢量叠加层存在抖动,希望画面更平滑,可通过【视频姿态校准】功能解决,该功能需借助空三辅助对视频抽帧,最终通过 ContextCapture(iTwinCapture)做空三计算,并导出空三后的 xml 姿态文件

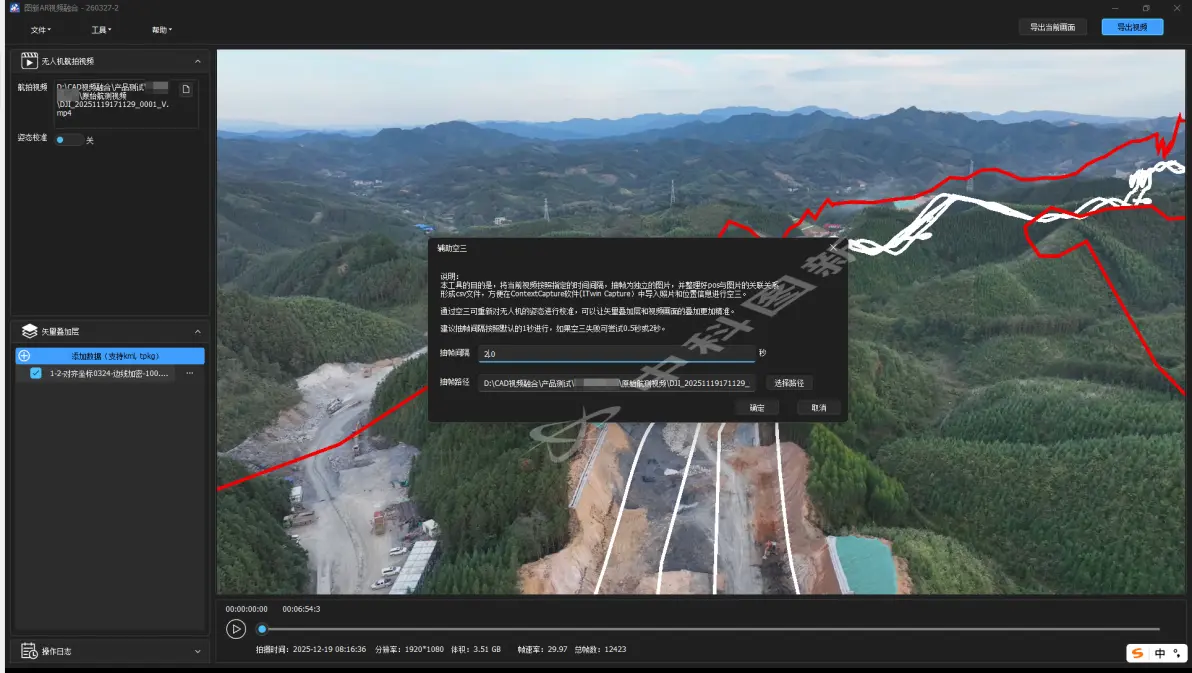
2.7空三辅助
空三辅助的核心目的是借助 ContextCapture(iTwinCapture)对无人机视频的姿态信息进行平差优化,核心功能是对视频进行抽帧,生成每一帧的 pos 文件,助力快速创建 ContextCapture(iTwinCapture)工程,操作要点如下:
-
抽帧结果默认保存至视频文件的同目录下
-
抽帧间隔建议使用软件默认值(2 秒 / 帧),经实测,该间隔下空三计算速度快、成功率高,且叠加后的视频画面肉眼基本无抖动
-
实测参考:5 分钟的航拍视频,空三计算时长约 7-10 分钟,具体时长因电脑配置略有差异
-
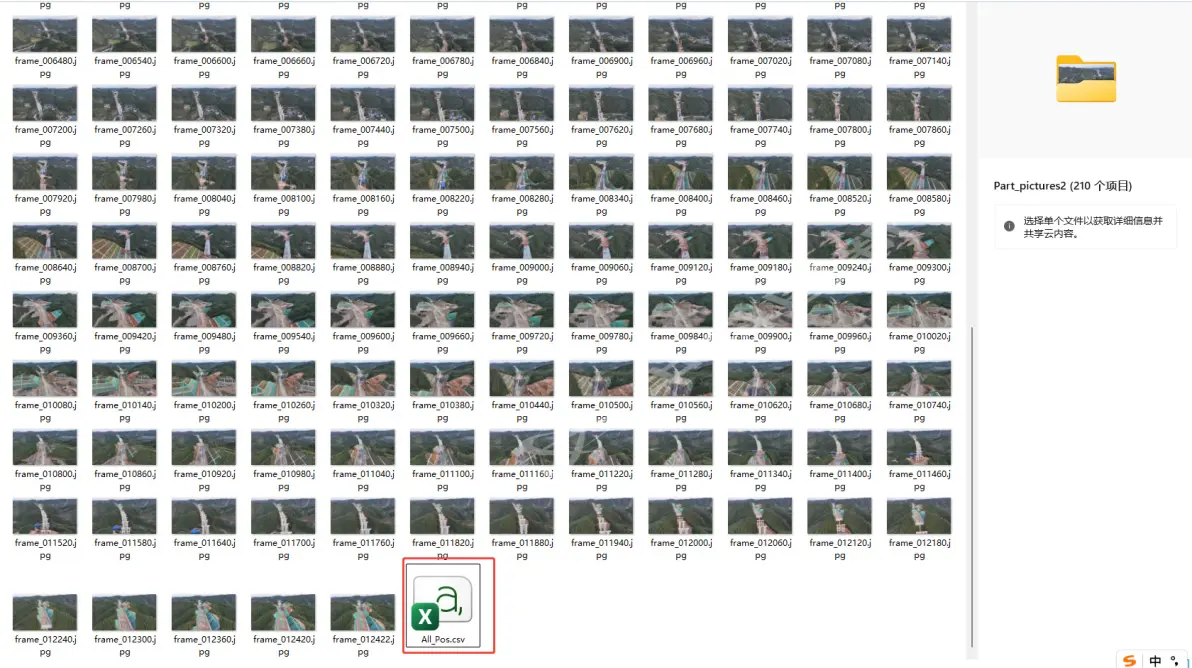
抽帧完成后,将生成两类文件:视频帧画面与对应的 pos 文件
抽帧结果如下:
2.8视频姿态校准
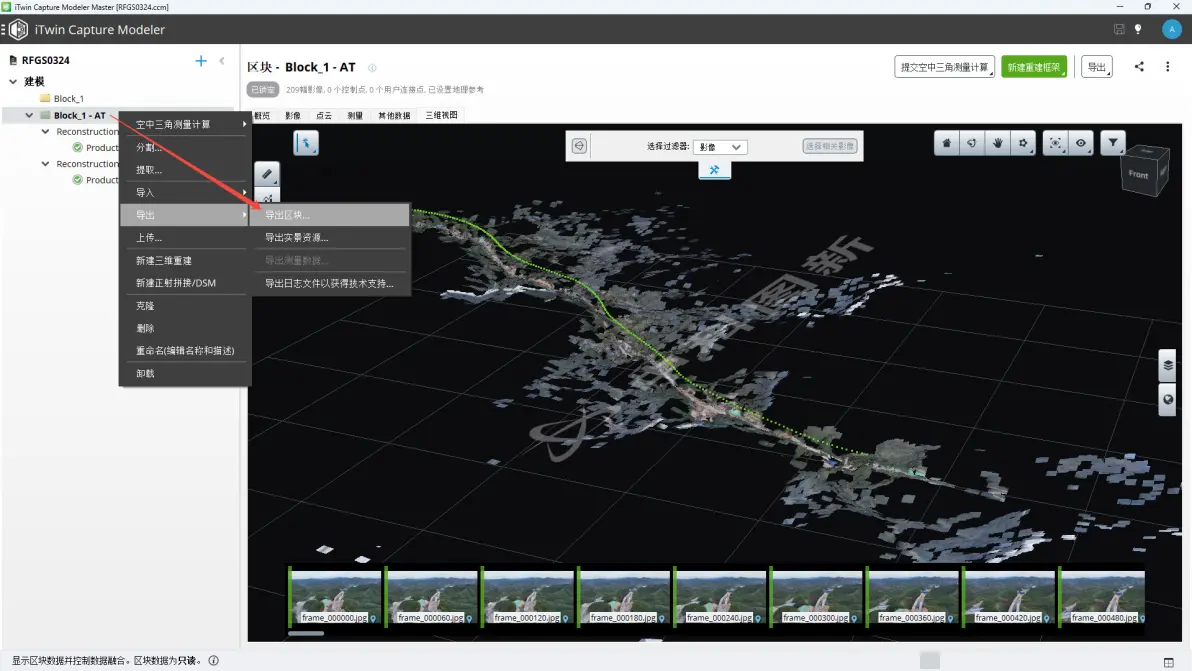
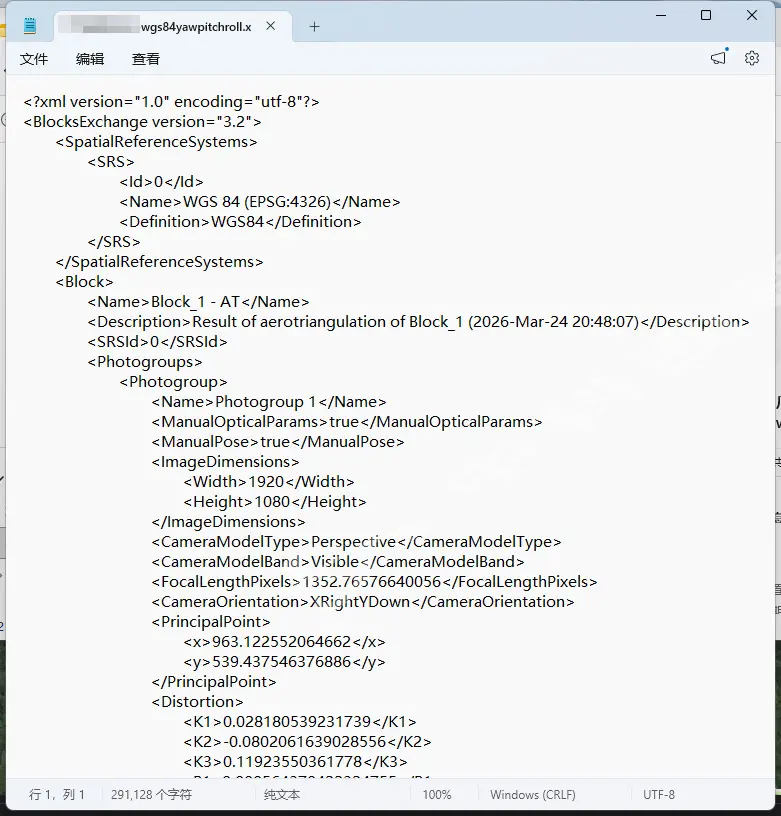
视频姿态校准的核心是导入 ContextCapture(iTwinCapture)导出的空三 xml 文件,具体导出参数与操作流程如下:
-
在 ContextCapture(iTwinCapture)中,右键空三计算完成的 Block,执行【导出区块】操作
-
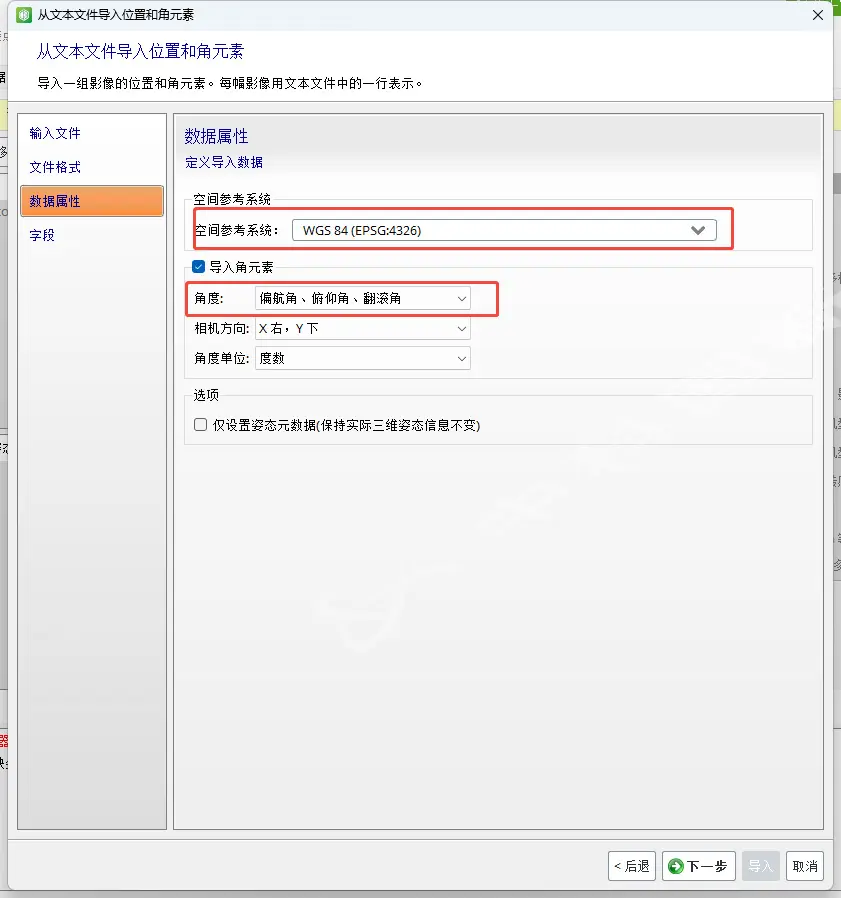
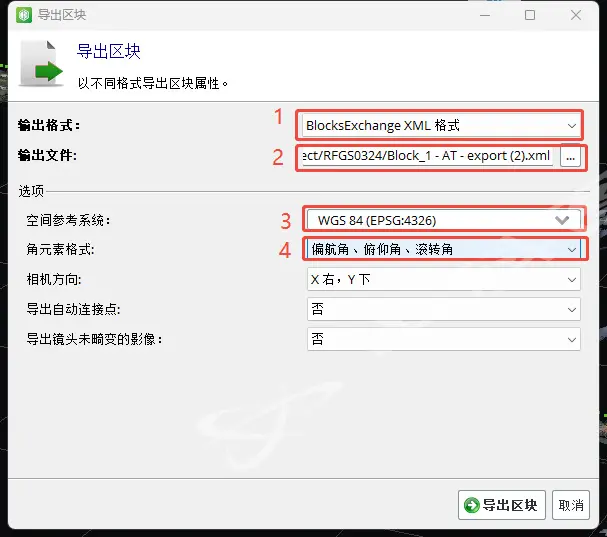
导出区块界面需配置 4 个核心参数,必须严格按要求设置:
o 输出格式:选择【BlocksExchangeXML 格式】
o 输出文件:选择本地存储目录,建议保存至视频同目录,便于在本软件中添加
o 空间参考系统:选择【WGS84(EPSG4326)】
o 角元素格式:选择【偏航角、俯仰角、滚转角】
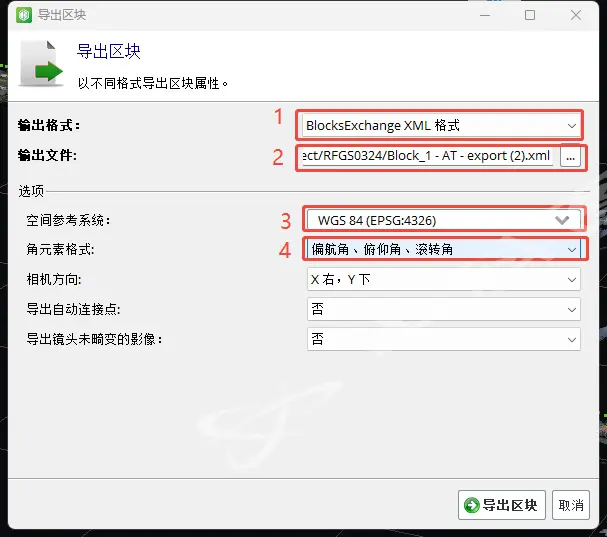
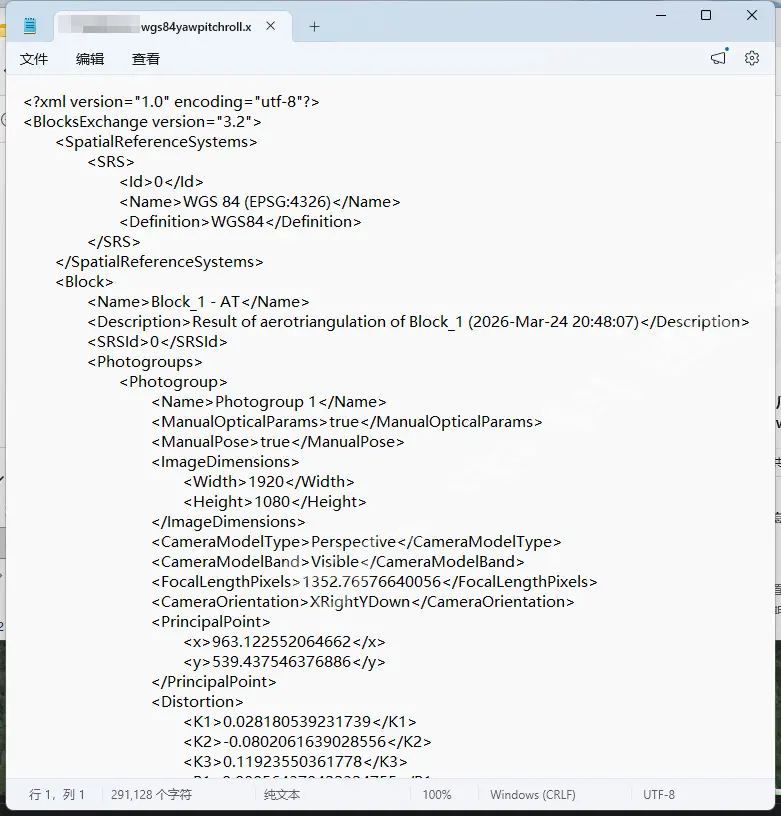
导出文件如图:
2.9配套地形切换
软件安装包内预置了用于矢量数据校准的默认地形数据配置,若需更换为其他地形数据,直接修改安装包内的地形配置文件,修改完成后重启软件,新配置即可生效。
3.应用技巧及常见问题:
3.1航拍的视频识别不到姿态信息
若使用大疆无人机航拍,视频无法被本软件识别姿态信息,核心解决办法 :在无人机拍摄视频模式下,确保视频字幕开关处于打开状态(需在无人机遥控器中进行配置)。

3.2矢量数据配置
矢量数据的前期配置直接影响融合效果与渲染效率,建议在图新说中完成矢量样式的符号化配置,本产品的矢量叠加层全面支持图新说中的所有矢量样式效果(包括文字标签、流动线、呼吸面等)。
实际应用中,无需将完整 CAD 图纸叠加至视频(全部叠加会导致画面杂乱),建议先对 CAD 数据进行精简处理,减少数据量,提升渲染效率;同时,CAD 原始线条通常较细,需针对性调整线条粗细或面对象状态,尤其是文字要素 ------CAD 中文字为贴地显示,叠加至视频时建议调整为广告牌效果;此外,项目范围线若仅含关键点直线、无中间点,会导致空间关系偏差,需提前优化
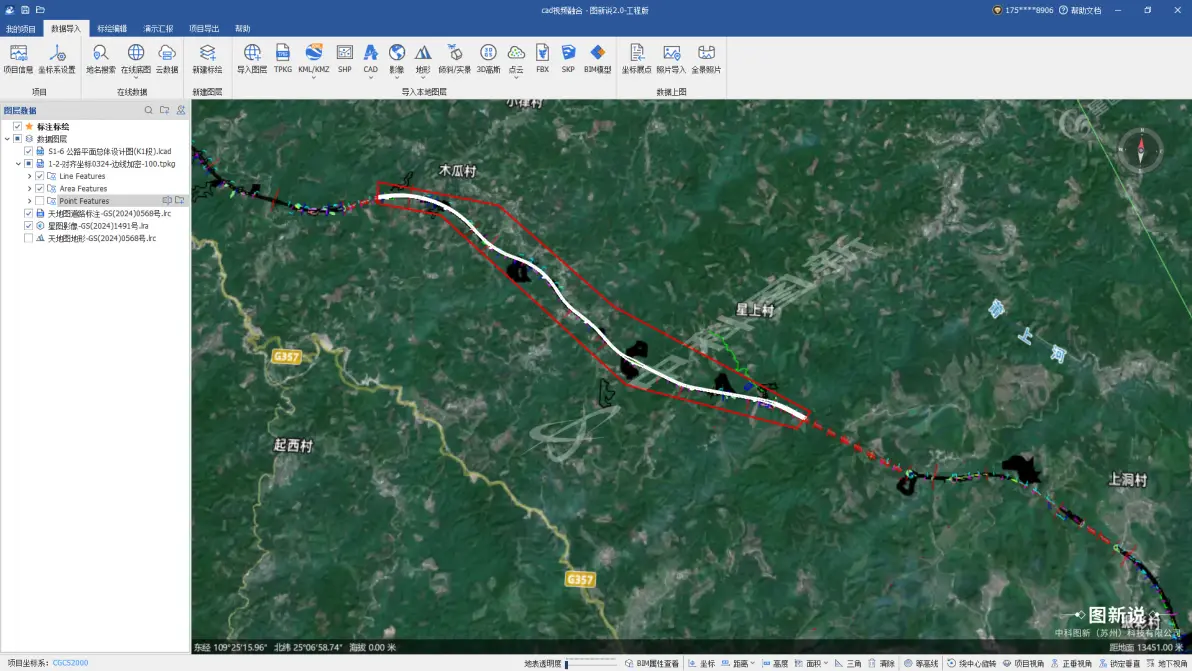
3.2.1CAD导入
CAD 数据配置的核心是坐标系配置准确,可通过叠加卫星影像的方式,直观判断 CAD 数据的平面位置是否正确,若图纸与影像叠加后位置完全匹配,即可确认投影配置无误。
CAD转TPKG
CAD 文件转换为 TPKG 文件有两种便捷方式,可按需选择:
-
直接在图新说中完成 CAD 到 TPKG 的转换,图新说下个版本会增加这个功能。
-
先通过 GlobalMapper 将 CAD 转为 kml 文件,再将 kml 文件加载至图新说,软件会自动生成 TPKG 文件
图新说加载kml会自动生成TPKG
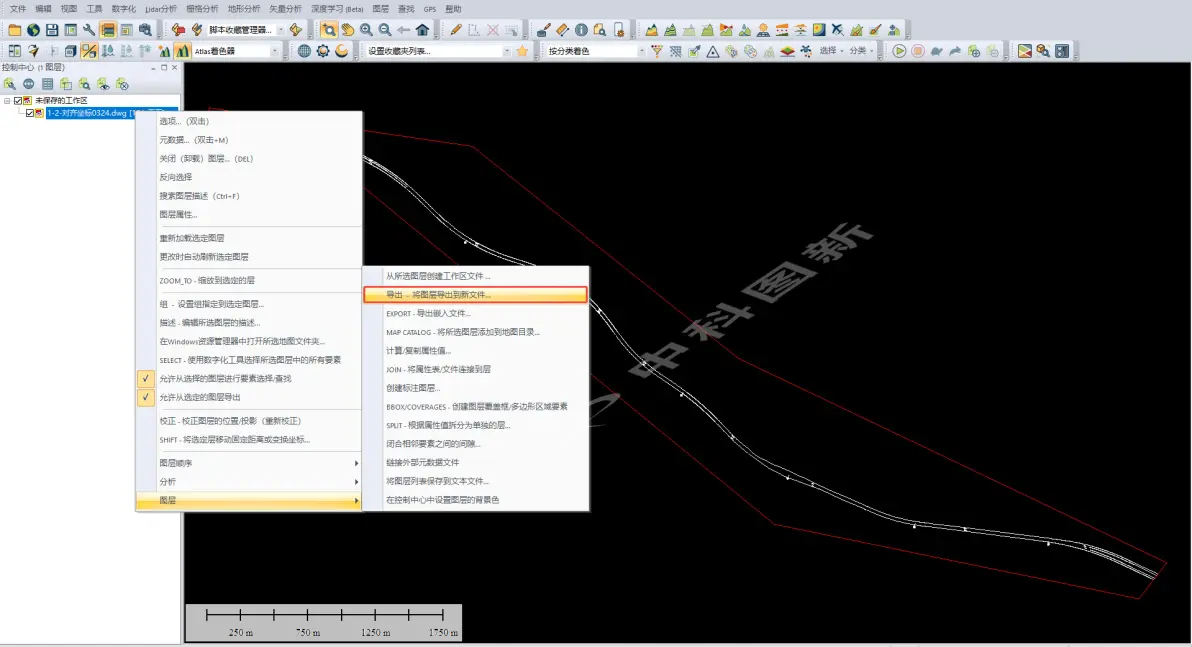
CAD数据剔除:
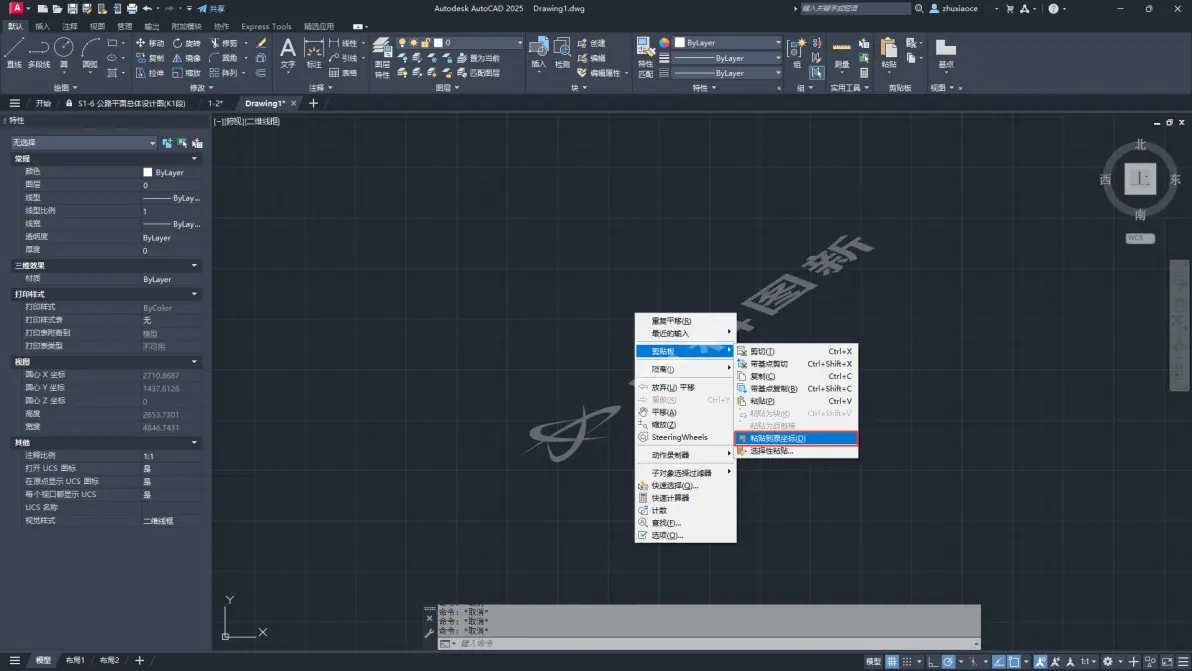
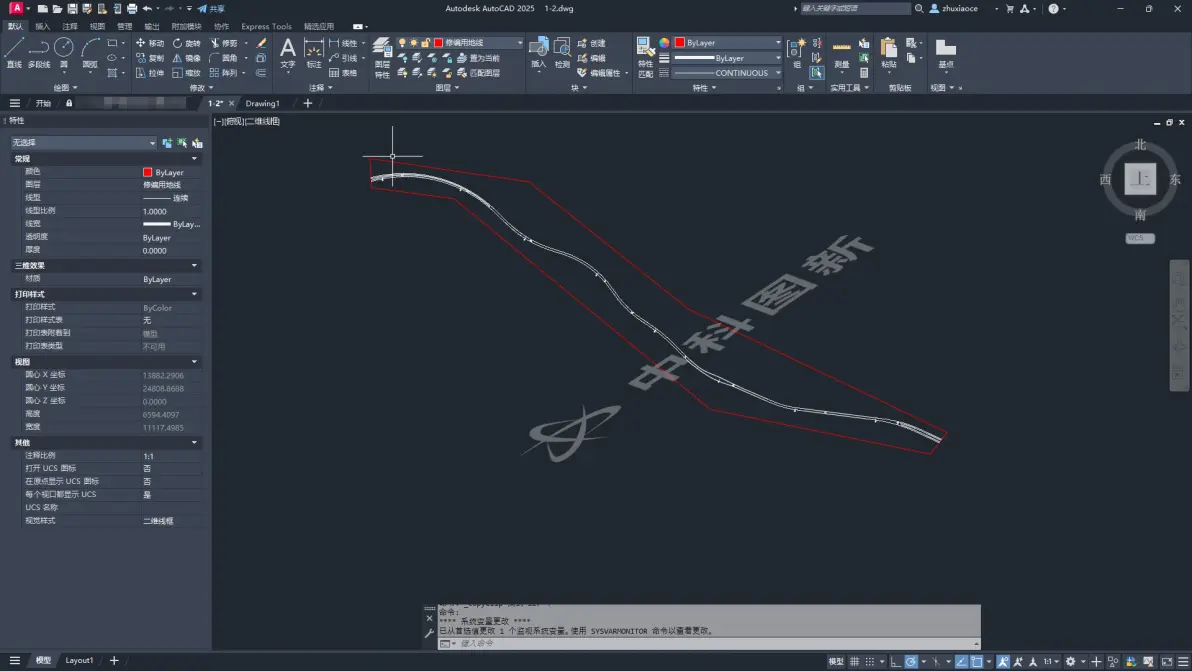
为保证数据精简且投影信息不丢失,建议按以下方式处理:选中 CAD 中需要保留的数据,使用【粘贴到原坐标】功能,将数据复制至新建的 CAD 文件中,新文件将完全继承原数据的投影信息。
若 CAD 图纸图层划分规整,也可直接按图层删除不需要的数据
3.3.2.CAD贴地文字处理
CAD 中的文字无论直接导入图新说,还是通过 GlobalMapper 转为 kml 后导入,都会自动转换为 GIS 中的 Marker 点标注,图新说内置丰富的文本配置功能,将此类文字(如公里桩、地面标识、项目所在地)按标注模式叠加至视频,效果更佳,且可省去在视频编辑软件中做追踪处理的步骤。
若需保留 CAD 文字的贴地显示模式,可在 CAD 中执行TXTEXP 命令,将文字转换为线条后再进行后续处理
命令:TXTEXP,转换效果如图
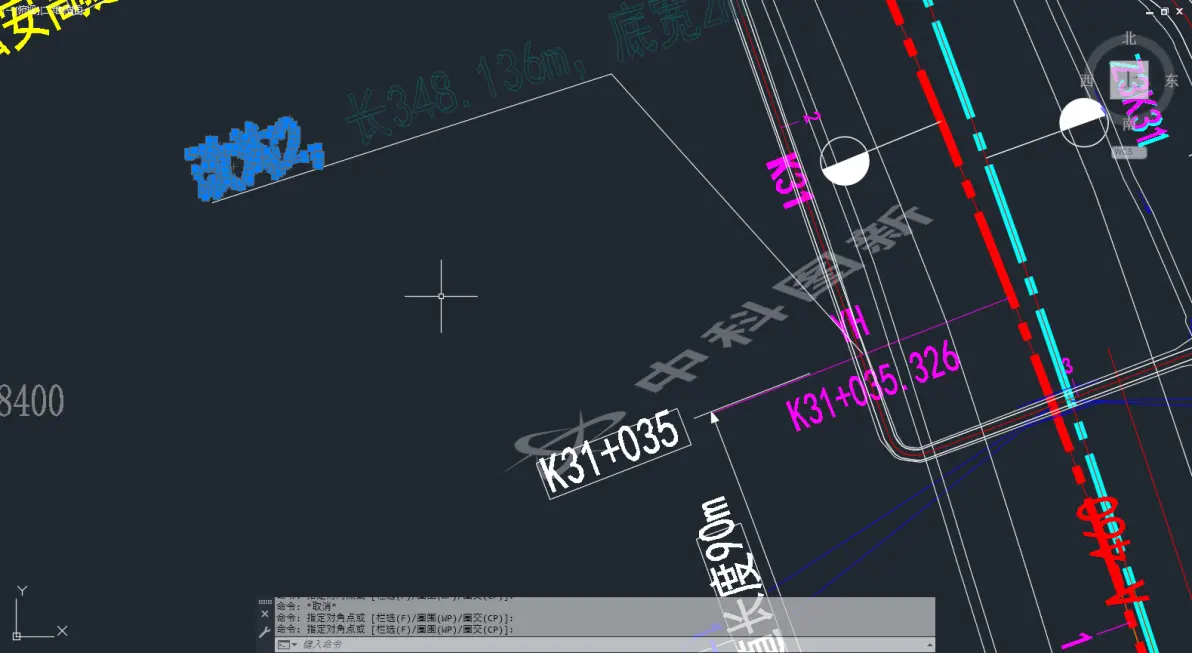
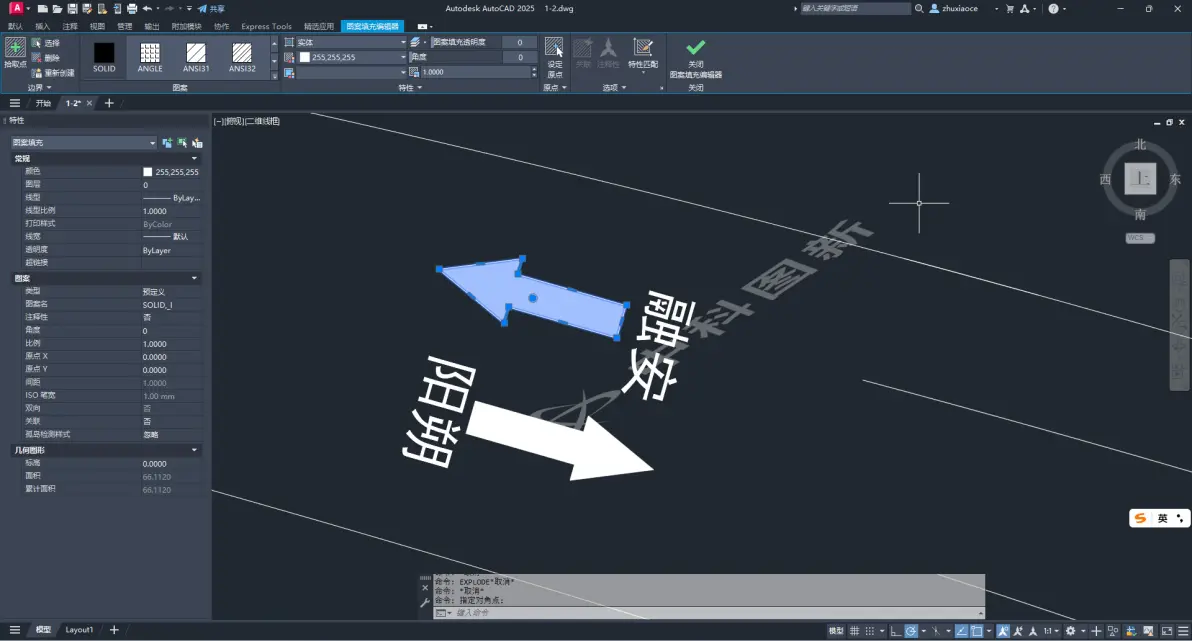
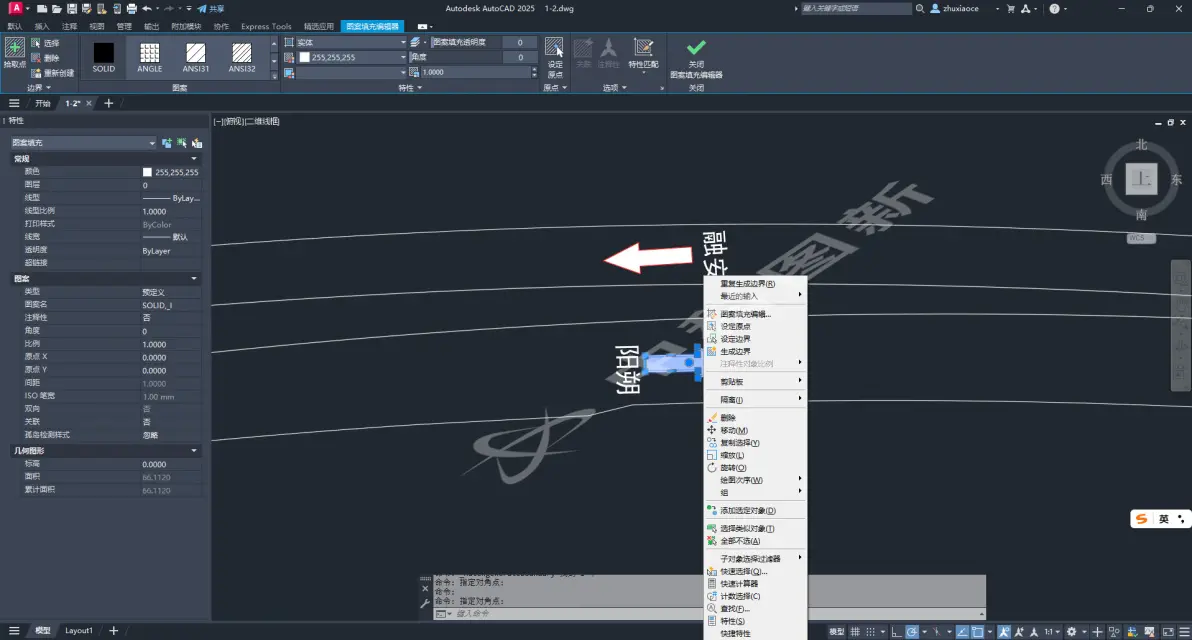
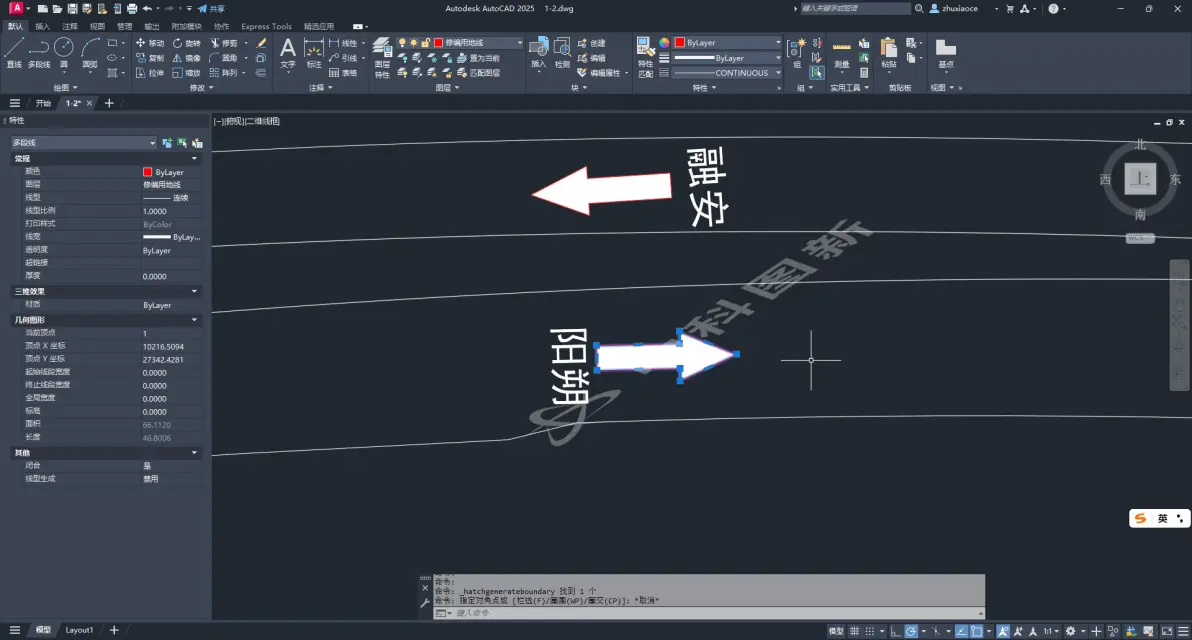
3.2.3箭头等HATCH特殊对象处理
· HATCH 对象为 CAD 特殊对象,由点阵 / 网格填充而成,并非线条构成,直接转换为 KML 文件时极易丢失,且难以被 GIS 软件自动识别,处理办法:右键选中 HATCH 对象,执行【生成边界】操作,将其转换为轮廓线条后,再进行格式转换与叠加。
3.2.4矢量样式编辑
图新说支持两种矢量样式配置方式,操作灵活:
-
按文件夹批量设置样式,适用于同类型要素的统一配置
-
选中单个要素,右键进行单独样式配置,适用于个性化调整
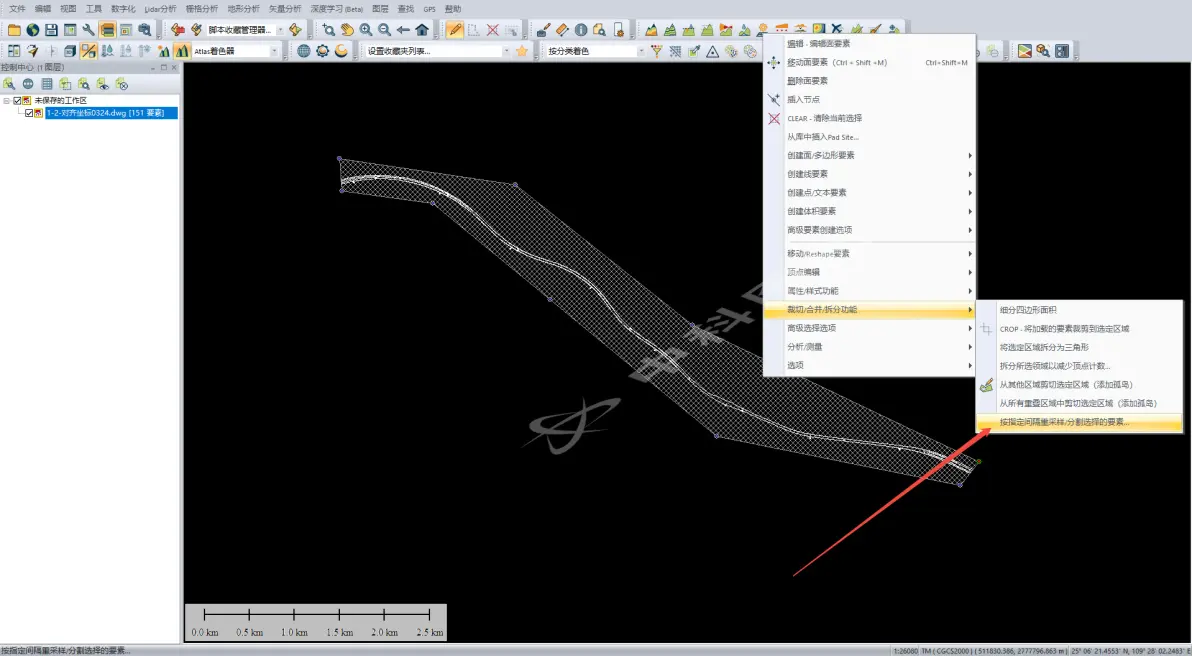
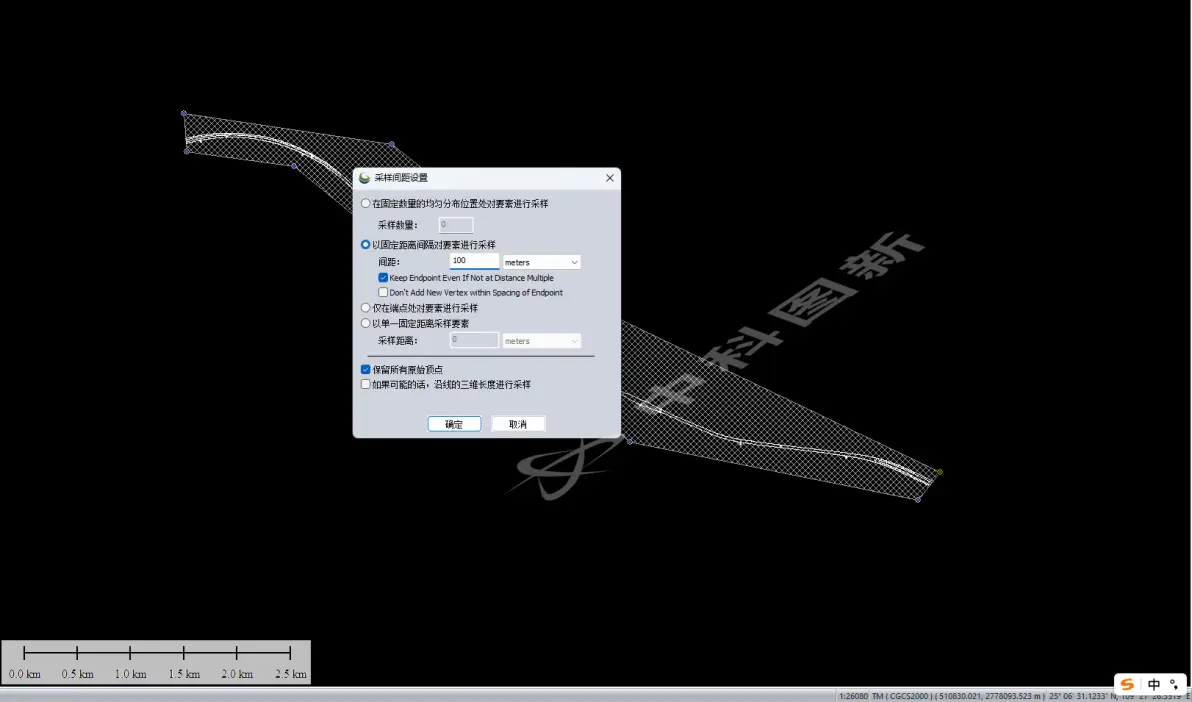
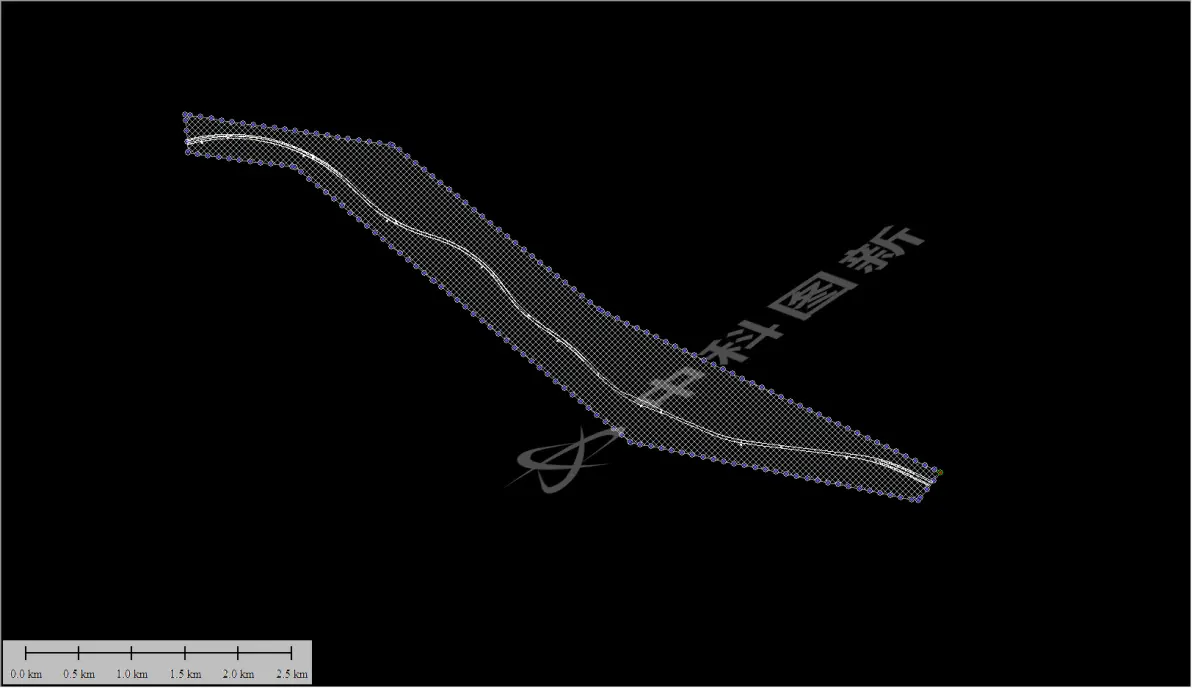
3.2.5轮廓线顶底加密
若手绘线条或 CAD 导入线条的顶点数量过少,会导致空间渲染效果不佳,可通过 GlobalMapper 对线条顶点进行加密,建议按 100 米 / 个点的密度设置,具体可根据实际融合效果灵活调整,操作步骤:选中需加密的要素,右键执行顶点加密功能即可。
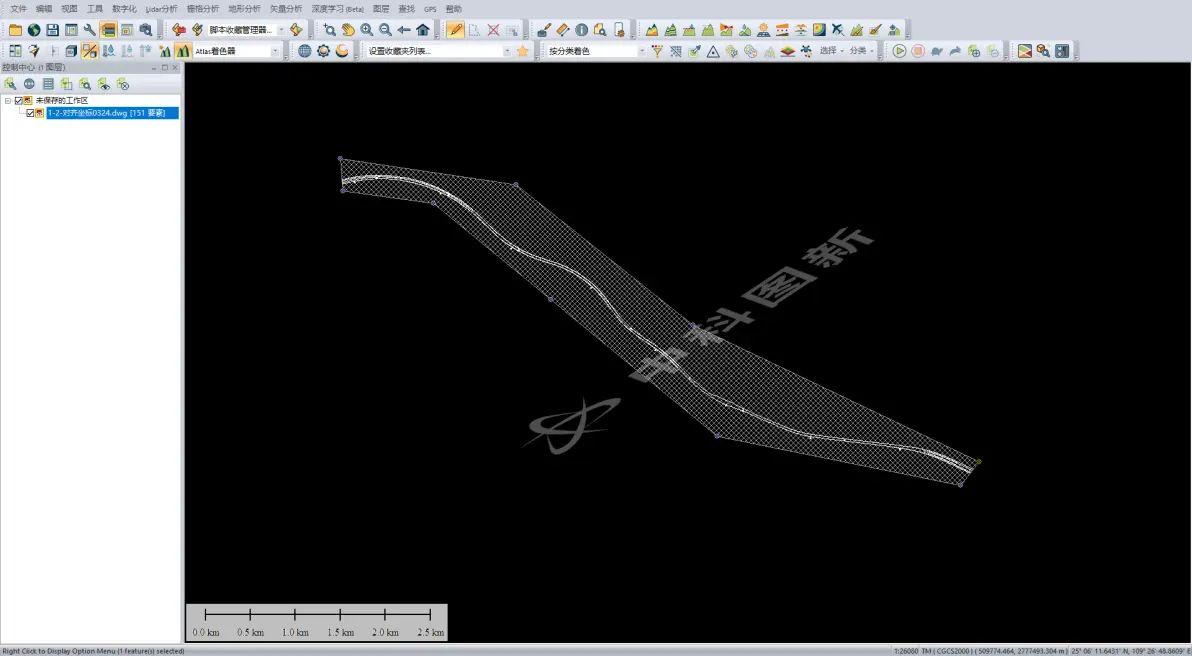
选中要素,右键
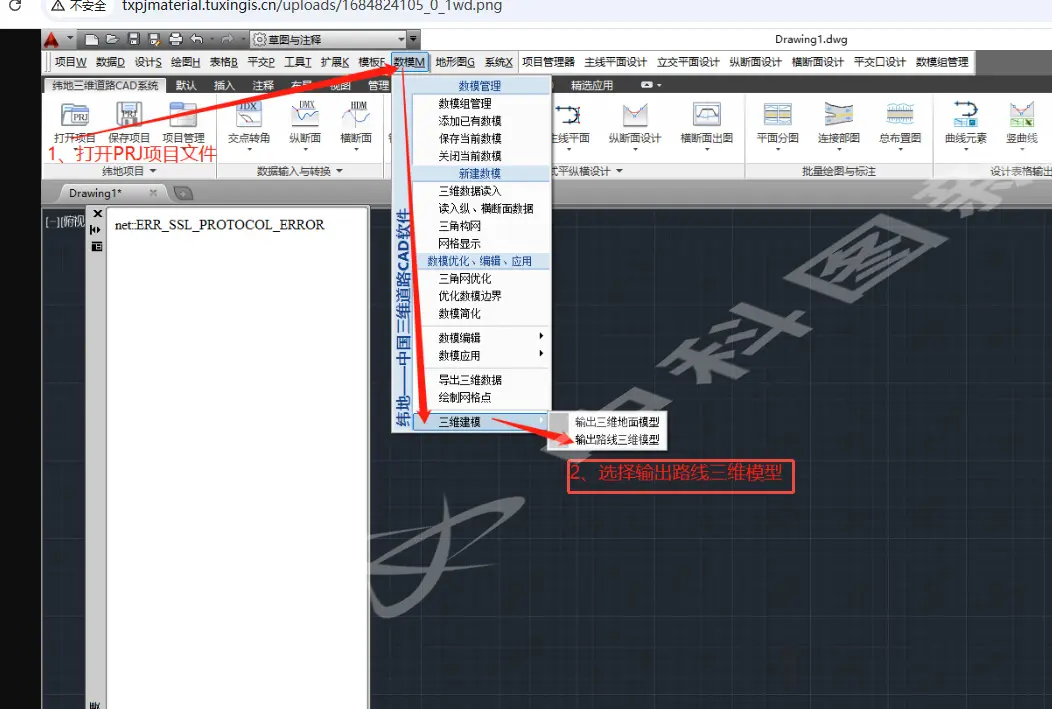
3.2.6纬地设计图立体贴合
纬地作为专业道路设计软件,可详细定义道路平纵横参数,包含横断面、纵断面及边坡的实际高度信息。若需实现纬地设计图与现场开挖航拍视频的立体精准叠加,可通过导出三维 CAD的方式,保留设计方案中道路中线、边线、边坡的相对高度关系,叠加后效果更佳,操作流程:在纬地中导出三维 CAD 文件→在 GlobalMapper 中查看三维效果→导入图新说完成后续配置。
纬地输出三维CAD
输出结果如图:
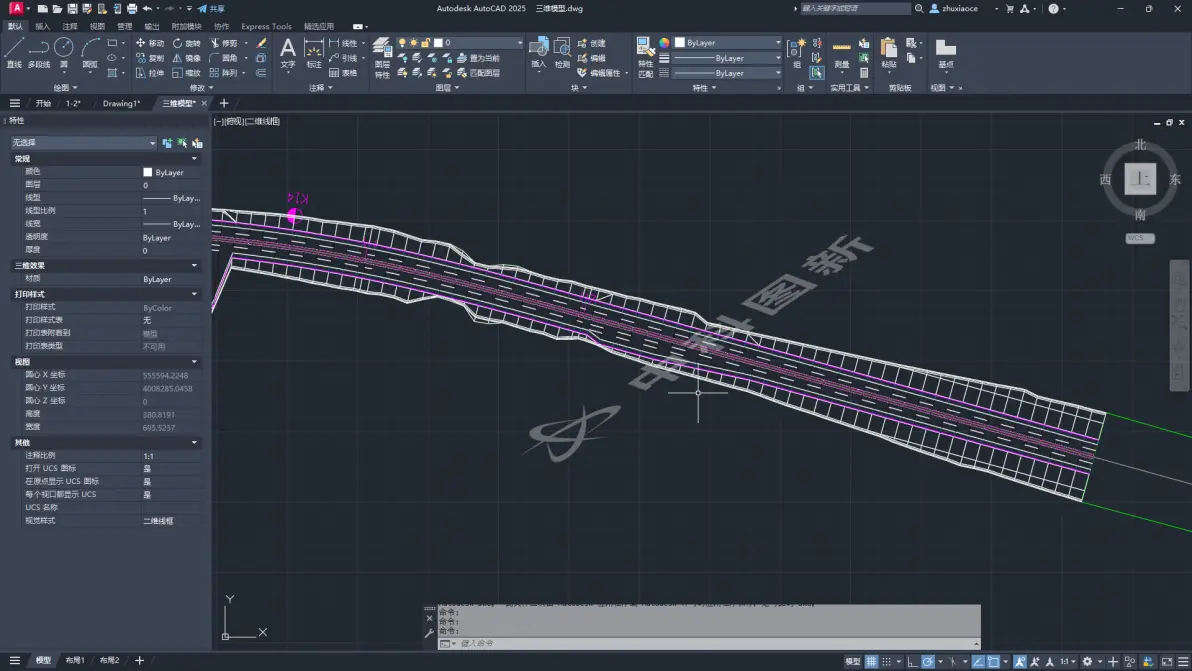
在GlobalMapper里面的查看效果
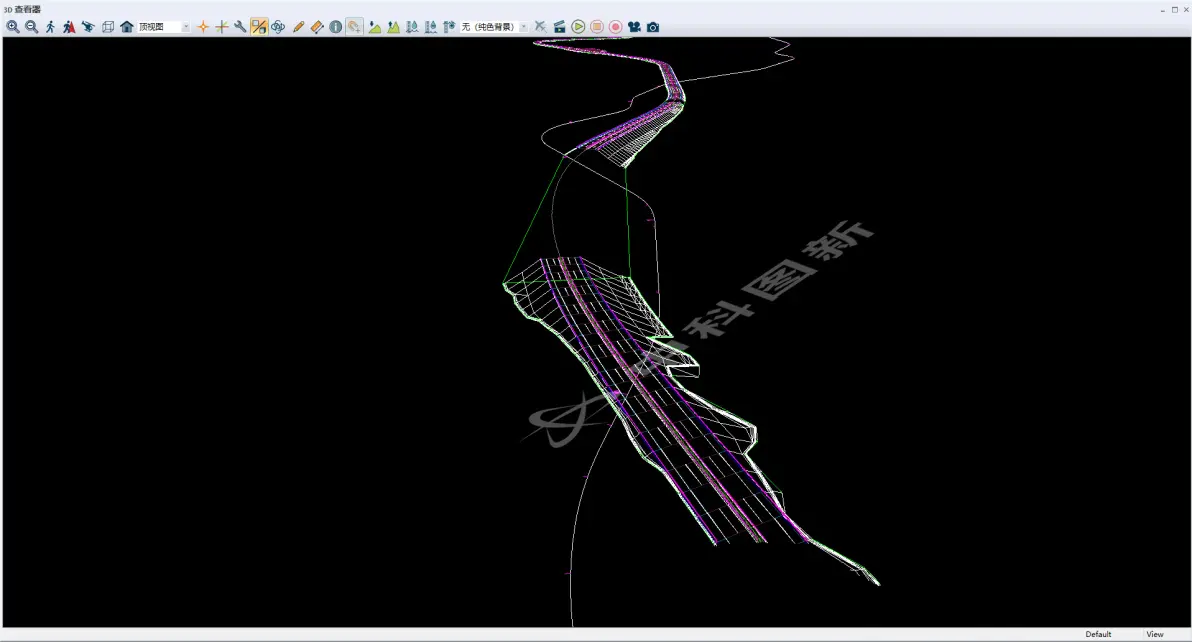
从纬地中提取空间的道路中线、占地线等数据,纬地导出的三维dwg文件,直接按照图层进行筛选即可。
Path代表中线,Clip代表占地线
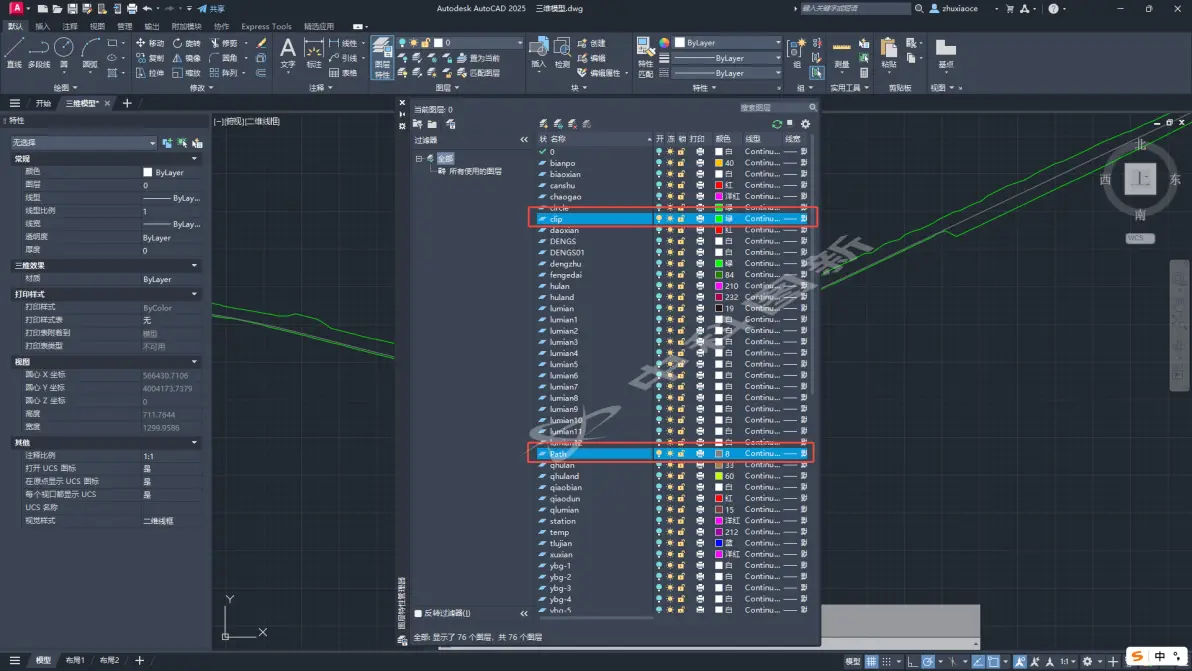
选中这两个图层里面的数据,拷贝到一个新文件,使用【粘贴到原坐标】方式,单独存储一个CAD文件
也可以在GlobalMapper里面打开这个CAD文件,为道路中线生成一个空间缓冲区(缓冲区范围的边线顶点和中线顶点高度一致)
3.3ContextCapture空三过程
直接使用本软件空三辅助功能导出的照片与 pos 文件,即可完成 ContextCapture 空三计算。解决矢量与视频叠加抖动问题时,无需建模,完成空三计算即可;若需在视频中添加自定义标绘,建议生成简易模型作为参考,可让标绘的线条、标注与视频画面叠加更精准。
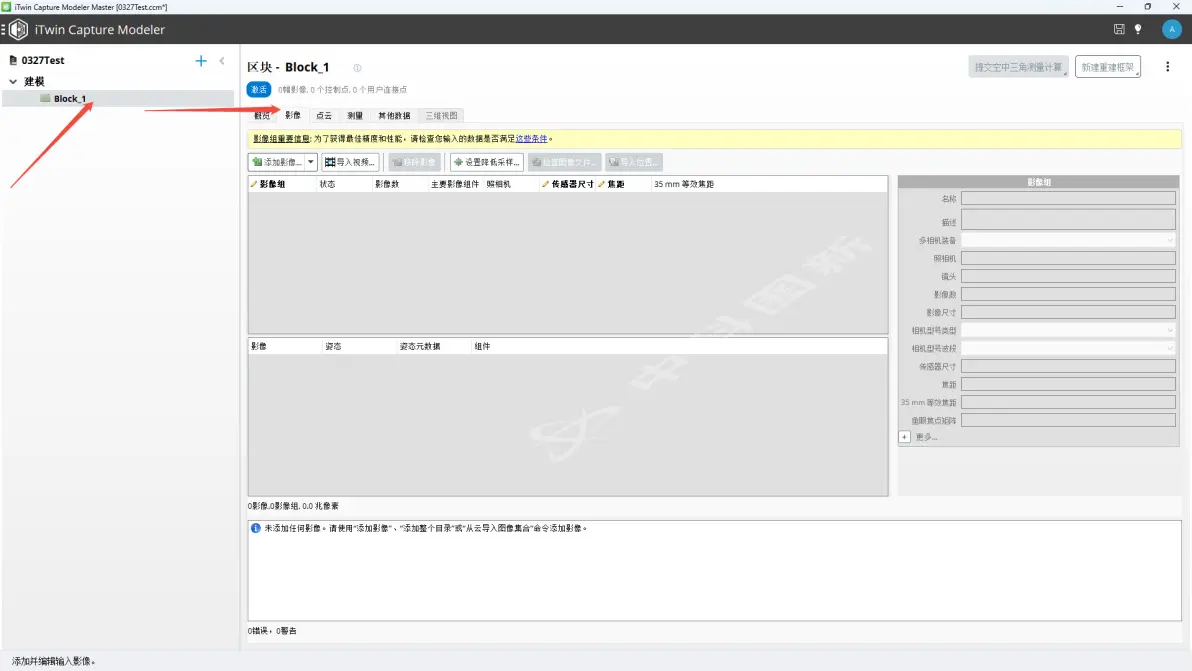
3.3.1新建ContextCapture工程
注意:CC工程路径不能带中文,带中文,在空三环节会报错
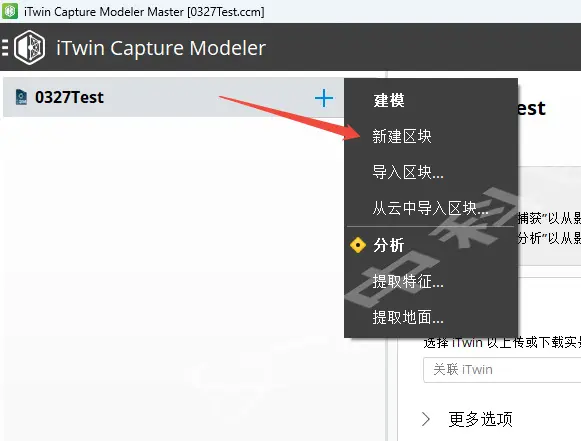
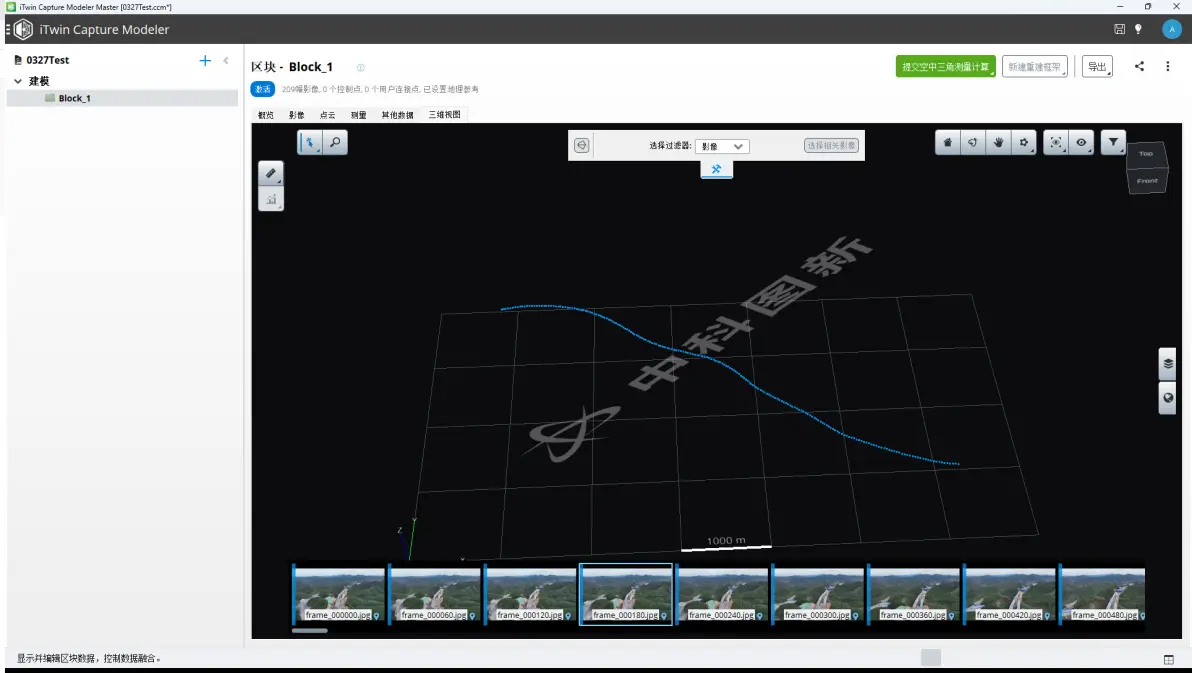
3.3.2导入照片
导入照片需先创建 Block(区块),再按以下步骤操作:
-
选中新建的 Block,切换至【影像】Tab 页
-
点击【添加影像】按钮,选择本软件空三辅助功能抽帧后的视频帧图片
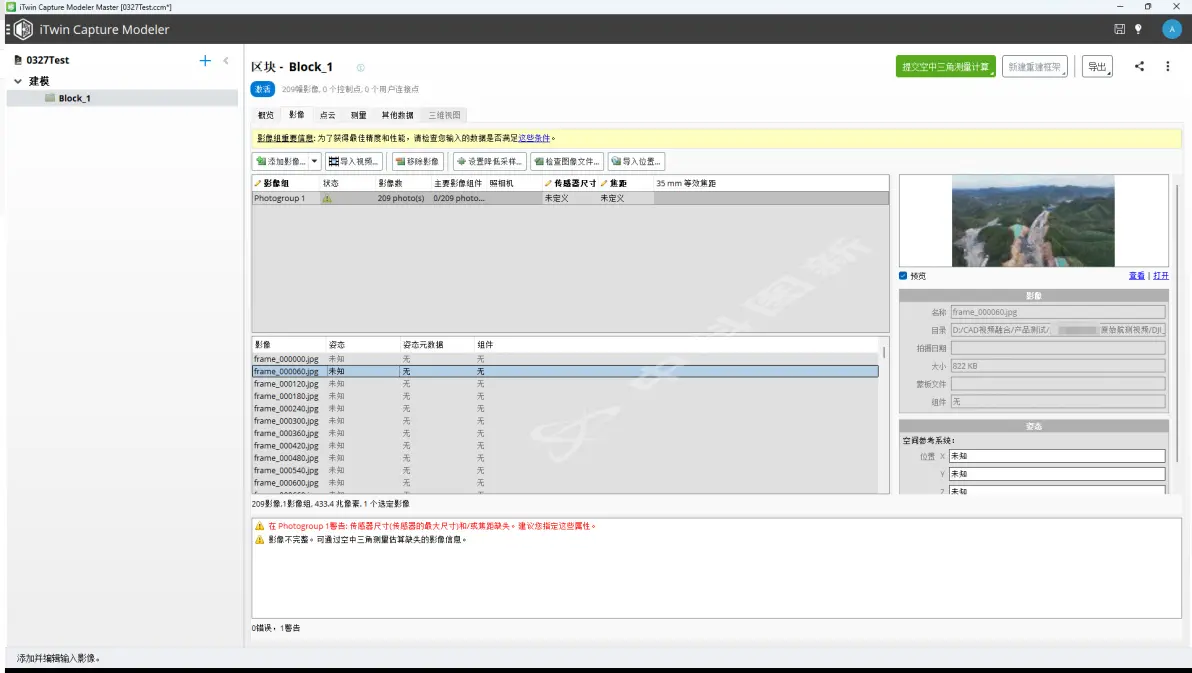
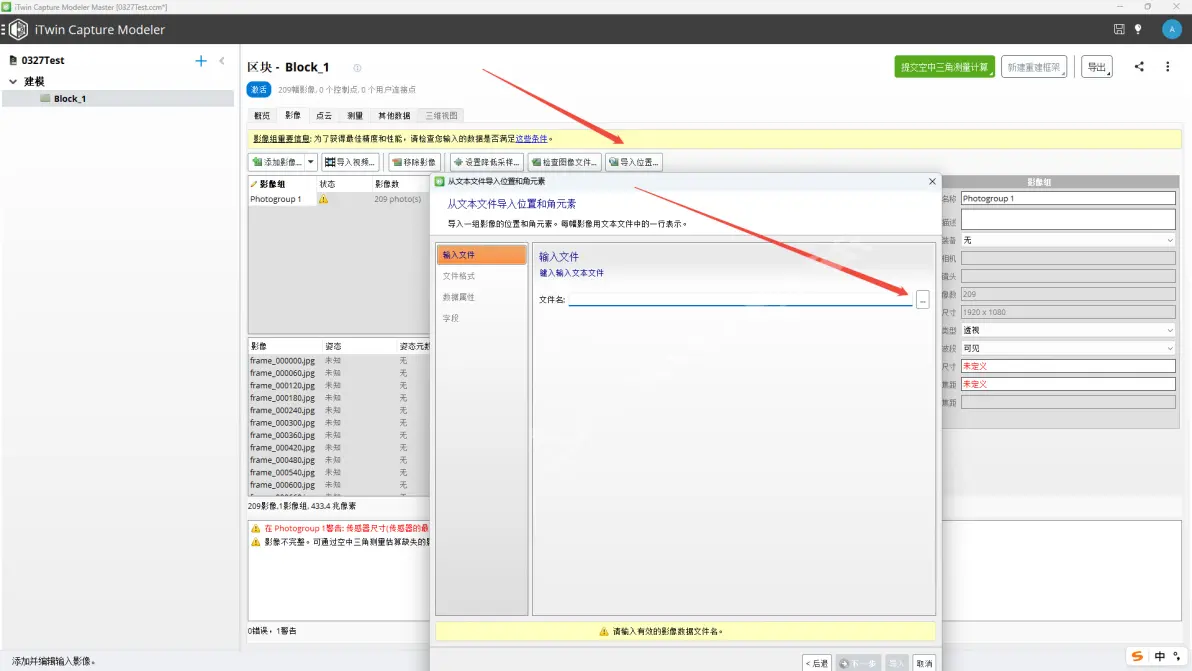
3.3.3导入pos文件
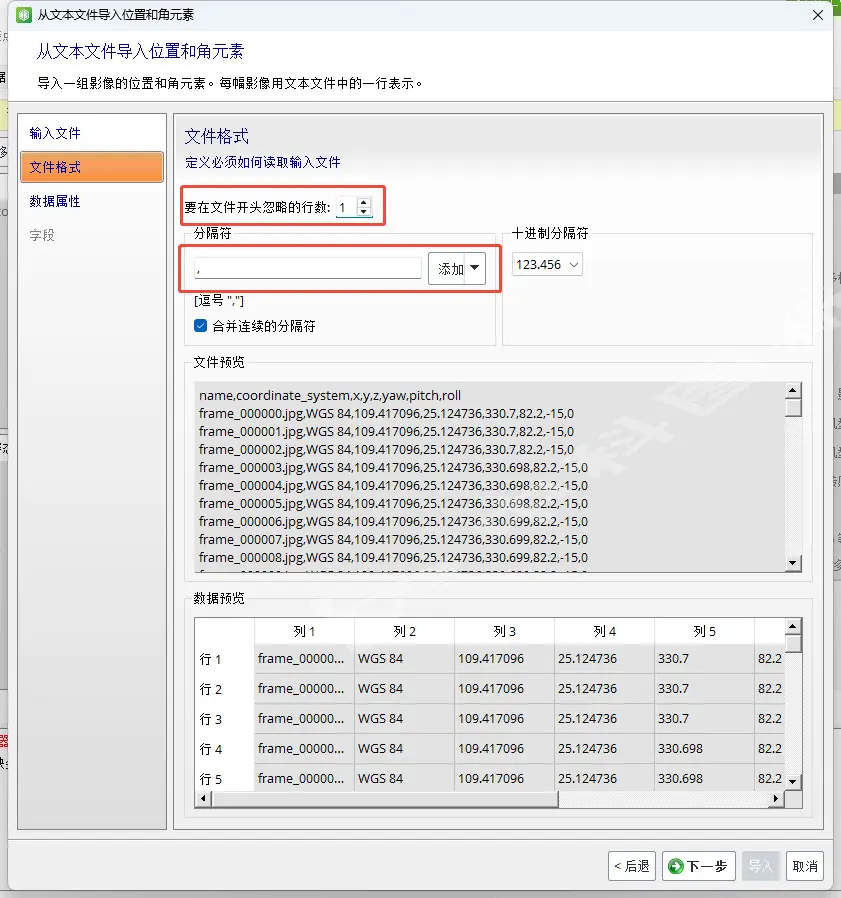
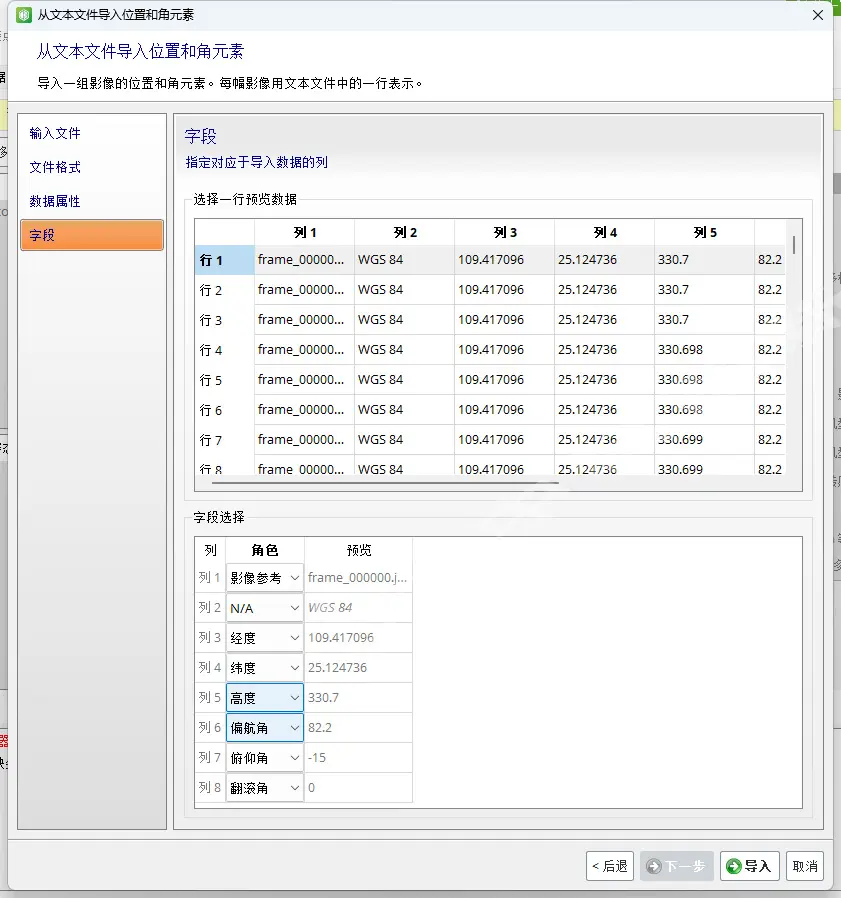
pos 文件为照片配置对应的姿态与位置信息,是空三计算包含地理信息的前提,操作步骤:
-
选中已导入照片的 Block,配置对应的 pos 文件
-
分隔符选择【逗号】,并删除 pos 文件的第一行内容
-
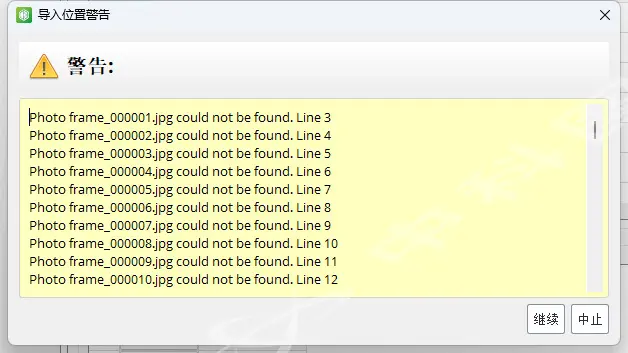
若出现 "pos 文件信息多于导入照片" 的提示,直接点击【继续】即可
配置完成后,照片将自带 pos 信息与姿态信息,可切换至三维模式直观查看。
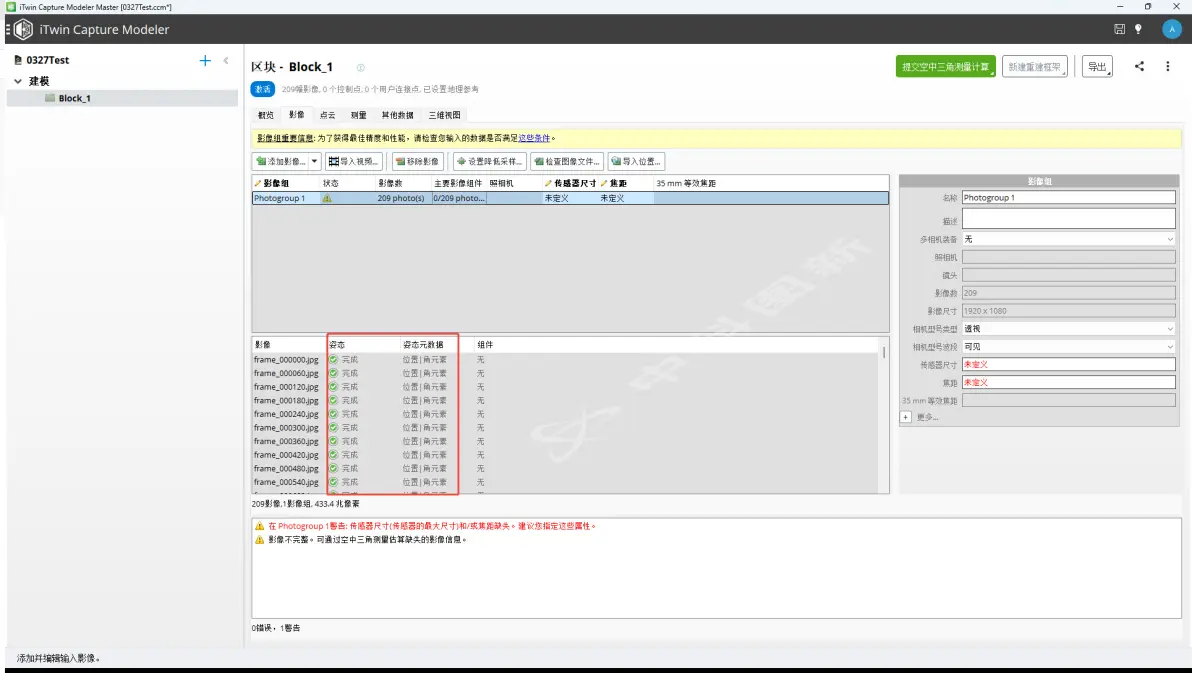
在三维模式下查看更加直观
3.3.4空三
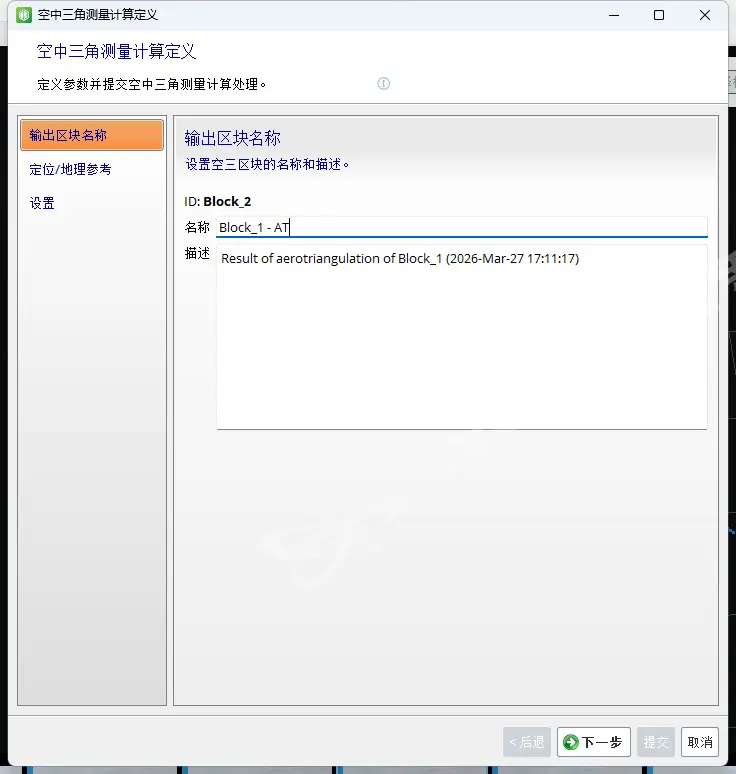
空三计算操作简单,全程自动化,核心步骤如下:
-
右键选中已配置照片与 pos 文件的 Block,提交空三计算
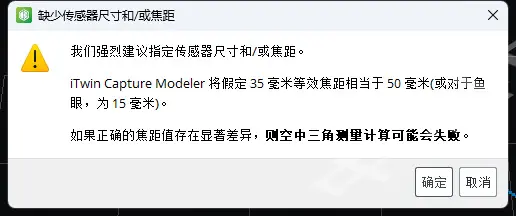
-
若知晓相机的焦距与传感器尺寸,建议手动填写,可提升空三计算成功率;若未知,软件将自动计算
-
其余参数保持软件默认设置即可
-
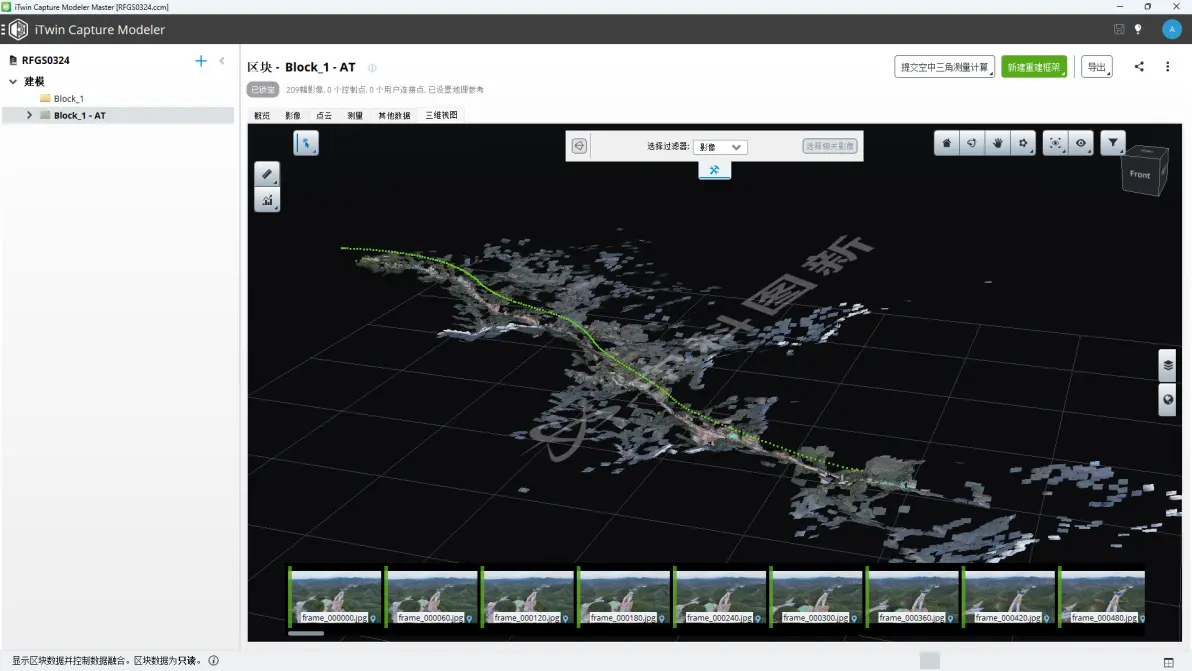
空三计算时长较短,通常几分钟即可完成


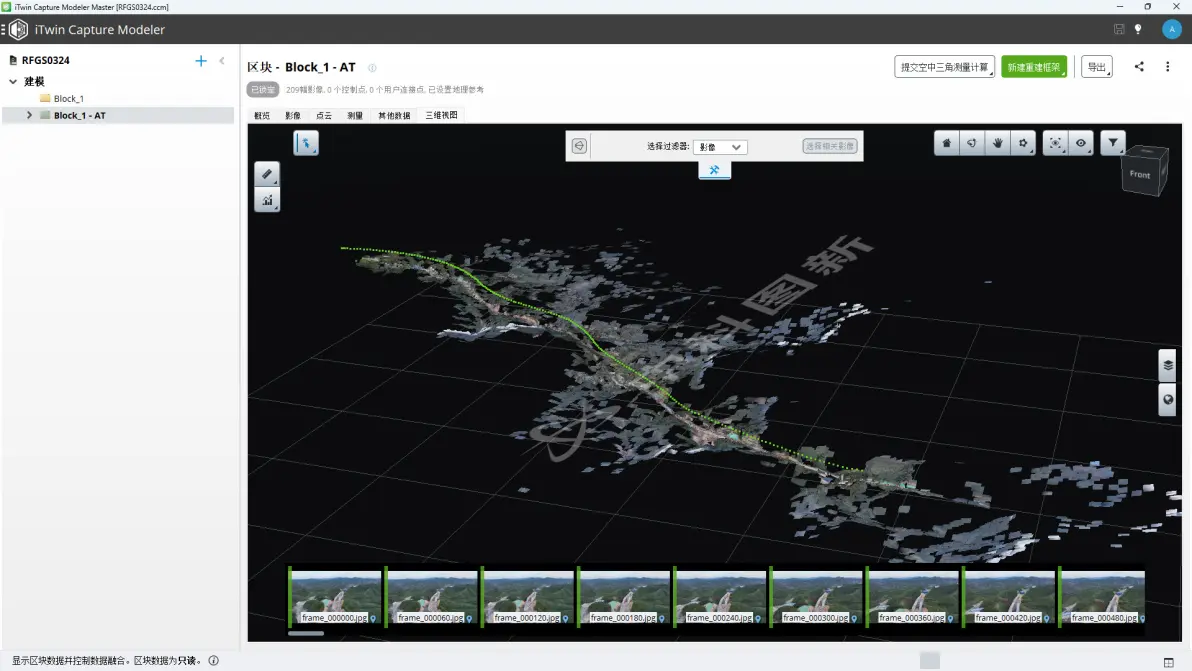
空三完成的效果如图:
3.3.5导出空三xml文件
导出的 xml 文件将用于本软件的视频姿态校准,操作与参数配置同 2.8 节一致:
-
右键空三计算完成的 Block,执行【导出区块】操作
-
严格配置 4 个核心参数:
o 输出格式:【BlocksExchangeXML 格式】
o 输出文件:建议保存至视频同目录
o 空间参考系统:【WGS84(EPSG4326)】
o 角元素格式:【偏航角、俯仰角、滚转角】
导出文件如图:
3.3.6生成模型
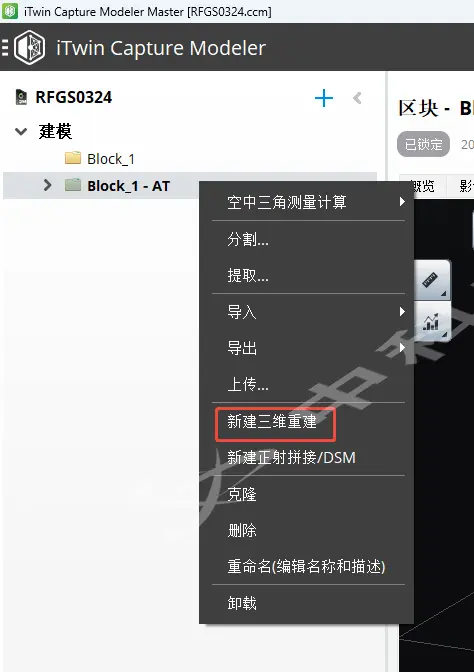
若需生成三维模型作为标绘参考,按以下步骤操作:
-
右键空三计算完成的 Block,执行【新建三维重建】操作
-
右键新建的 Reconstruction,执行【提交生产】
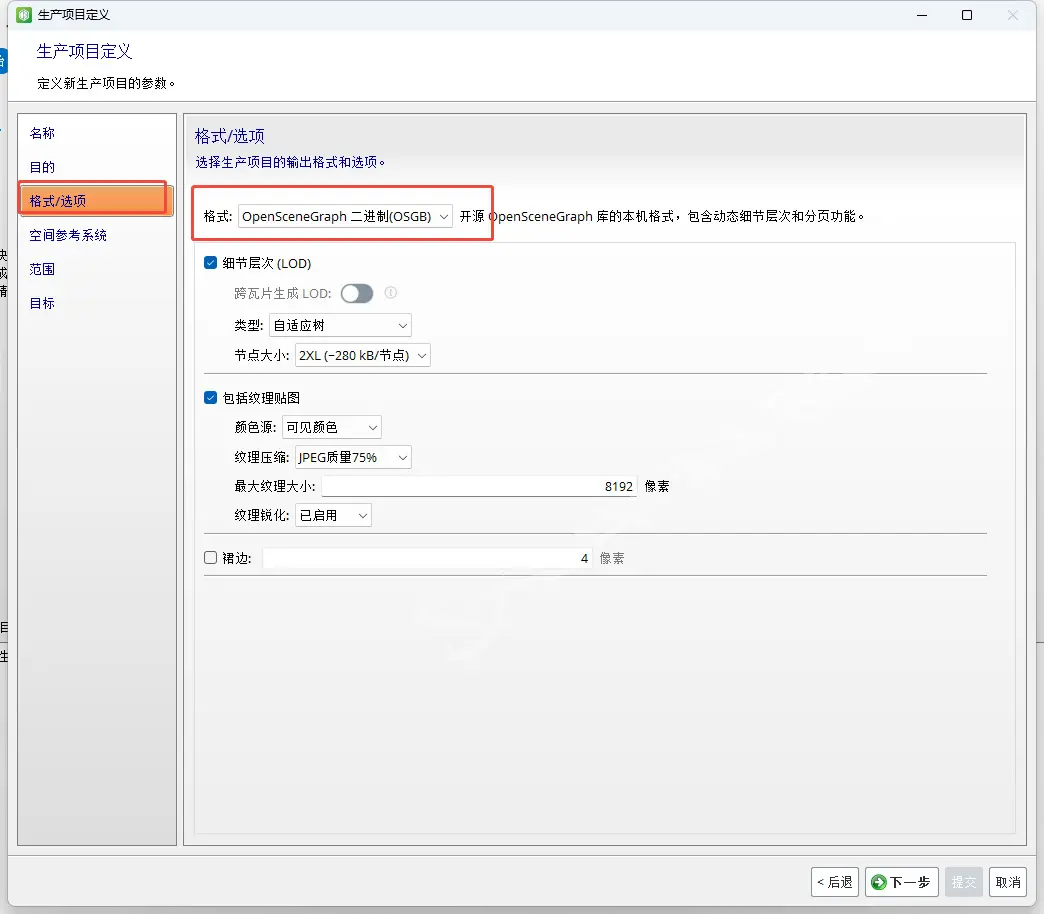
-
模型格式选择【osgb】
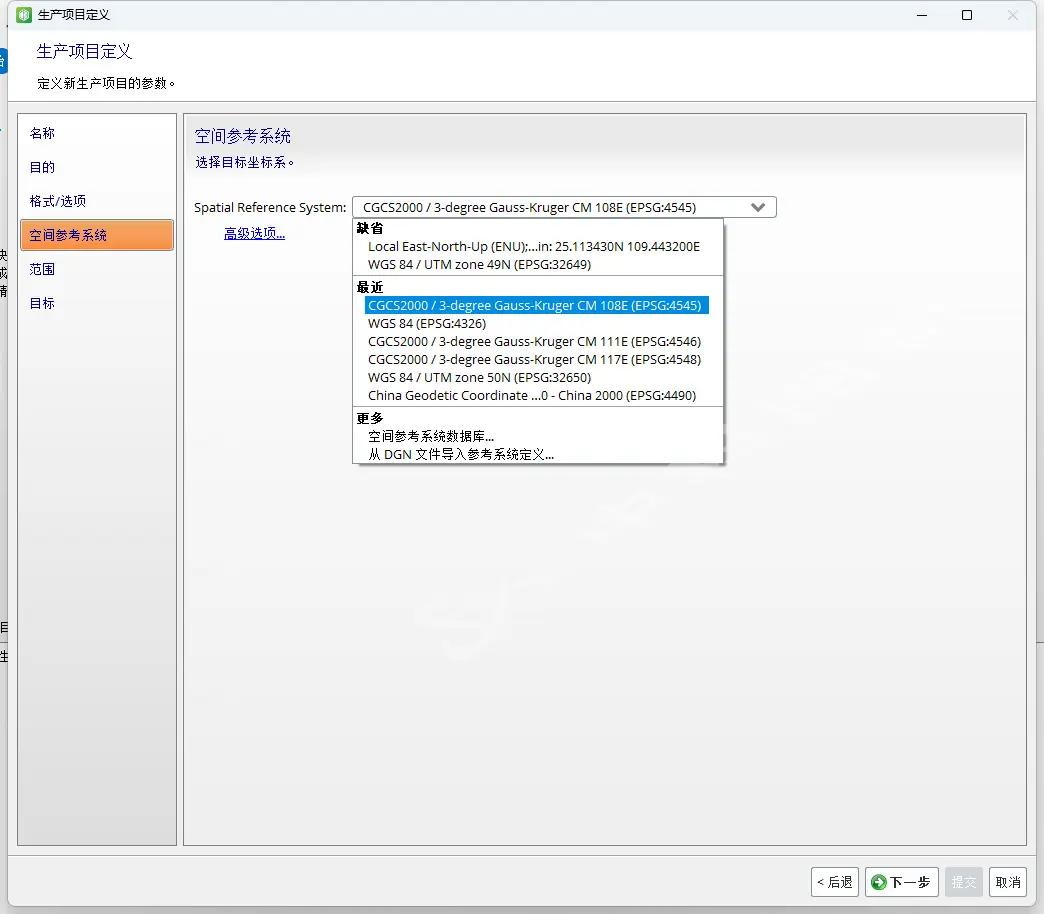
4. 空间参考系统选择国家 2000 平面坐标,禁止选择经纬度
- 生成的模型虽相较于专业测绘模型略粗糙,但完全能满足辅助标绘、提升叠加精准度的需求,可直接在图新说中加载查看。

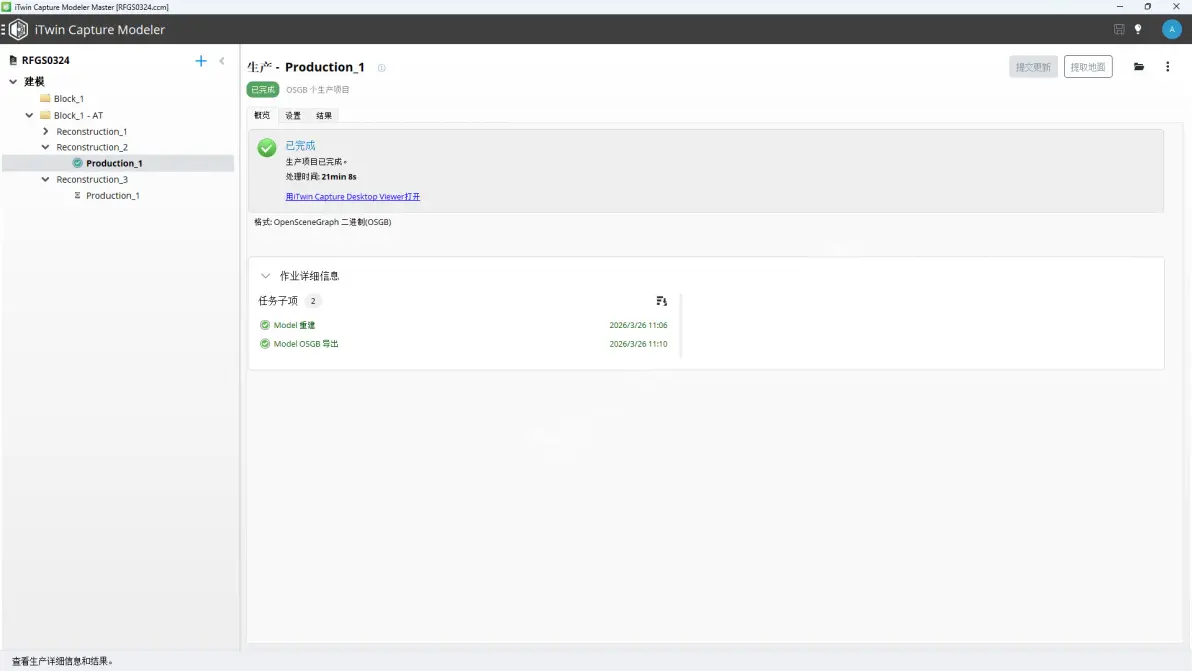
图新说加载效果如下: