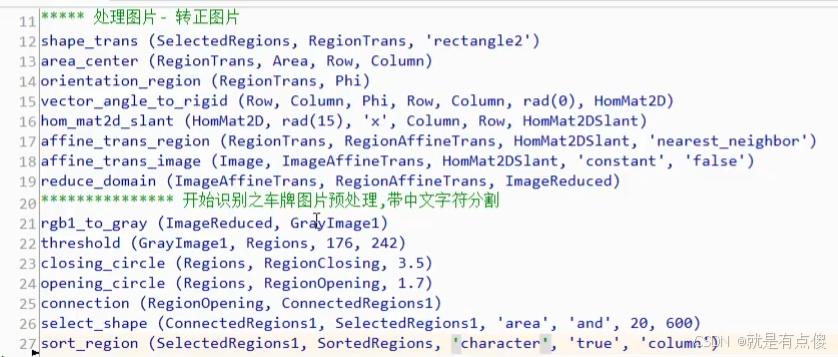
将图像中需要的内容倾斜的转正 然后将里面的字符进行读取
1. shape_trans --- 区域形状变换
-
作用 :将区域转换为它的凸包 、最小外接矩形/圆 、外接圆等标准形状。
-
常用模式:
-
'convex':凸包(常用) -
'rectangle1':平行于坐标轴的最小外接矩形 -
'rectangle2':任意方向的最小外接矩形 -
'outer_circle':最小外接圆
-
-
示例 :
shape_trans(Region, ConvexRegion, 'convex')
2. area_center --- 计算面积和中心
-
作用 :计算区域的面积(像素数) 和重心坐标。
-
输出:面积、中心行坐标、中心列坐标。
-
示例 :
area_center(Region, Area, Row, Column)
3. orientation_region --- 计算区域方向
-
作用 :计算区域的主轴方向(角度,单位弧度,范围 -π/2 到 π/2)。
-
原理:基于区域的二阶矩计算椭圆长轴角度。
-
示例 :
orientation_region(Region, Phi)--- Phi 为弧度角度。 -
注意:仅对近似椭圆形的区域有意义
4. vector_angle_to_rigid --- 生成刚体变换矩阵
-
作用 :根据平移+旋转生成刚性仿射变换矩阵(无缩放、无斜切)。
-
参数 :从点
(Row1, Col1)旋转Angle1到点(Row2, Col2)旋转Angle2。 -
示例 :
vector_angle_to_rigid(Row1, Col1, Angle1, Row2, Col2, Angle2, HomMat2D) -
典型用法:将检测到的物体对齐到标准位置。
5. hom_mat2d_slant --- 生成斜切变换矩阵
-
作用 :在已有变换矩阵上添加斜切效果(模拟倾斜视角)。
-
参数:斜切角度、方向('x' 或 'y')、中心点坐标。
-
示例 :
hom_mat2d_slant(HomMat2D, SlantAngle, 'x', CenterRow, CenterCol, HomMat2DSlant)
6. affine_trans_region --- 对区域做仿射变换
-
作用 :将变换矩阵应用到区域上。
-
示例 :
affine_trans_region(Region, TransRegion, HomMat2D, 'nearest_neighbor')
7. affine_trans_image --- 对图像做仿射变换
-
作用 :将变换矩阵应用到图像上(常用做旋转校正)。
-
示例 :
affine_trans_image(Image, TransImage, HomMat2D, 'constant', 'false')
8. reduce_domain --- 缩减图像域
-
作用 :将图像裁剪到指定区域,后续操作仅在该区域内进行(提高效率)。
-
示例 :
reduce_domain(Image, Region, ImageReduced) -
典型流程 :
threshold → connection → select_shape → reduce_domain
9. rgb1_to_gray --- 彩色转灰度(已介绍过,略)
10. threshold --- 阈值分割(已介绍过,略)
11. closing_circle --- 圆形闭运算
-
作用 :先膨胀后腐蚀,填充小孔、连接断开的区域。
-
参数:圆形结构元素的半径。
-
示例 :
closing_circle(Region, RegionClosing, 5)
12. opening_circle --- 圆形开运算
-
作用 :先腐蚀后膨胀,消除小的孤立噪点、分离粘连物体。
-
示例 :
opening_circle(Region, RegionOpening, 3)
13. sort_region --- 区域排序
-
作用:对多个区域按位置(行/列/方向)排序。
-
常用模式:
-
'character':按阅读顺序(从左到右,从上到下) -
'upper_left':按左上角坐标 -
'center_row':按中心行
-
-
示例 :
sort_region(Regions, SortedRegions, 'character', 'true', 'row')
| 算子 | 用途 | 典型场景 |
|---|---|---|
shape_trans |
获取外接形状 | 计算包围盒 |
area_center |
面积+重心 | 特征提取 |
orientation_region |
方向角 | 姿态估计 |
vector_angle_to_rigid |
刚体变换矩阵 | 旋转校正 |
hom_mat2d_slant |
斜切矩阵 | 透视模拟 |
affine_trans_region |
区域变换 | 对齐区域 |
affine_trans_image |
图像变换 | 图像校正 |
reduce_domain |
裁剪图像域 | ROI处理 |
closing_circle |
闭运算 | 填充孔洞 |
opening_circle |
开运算 | 去噪 |
sort_region |
区域排序 | OCR/字符识别 |