目录
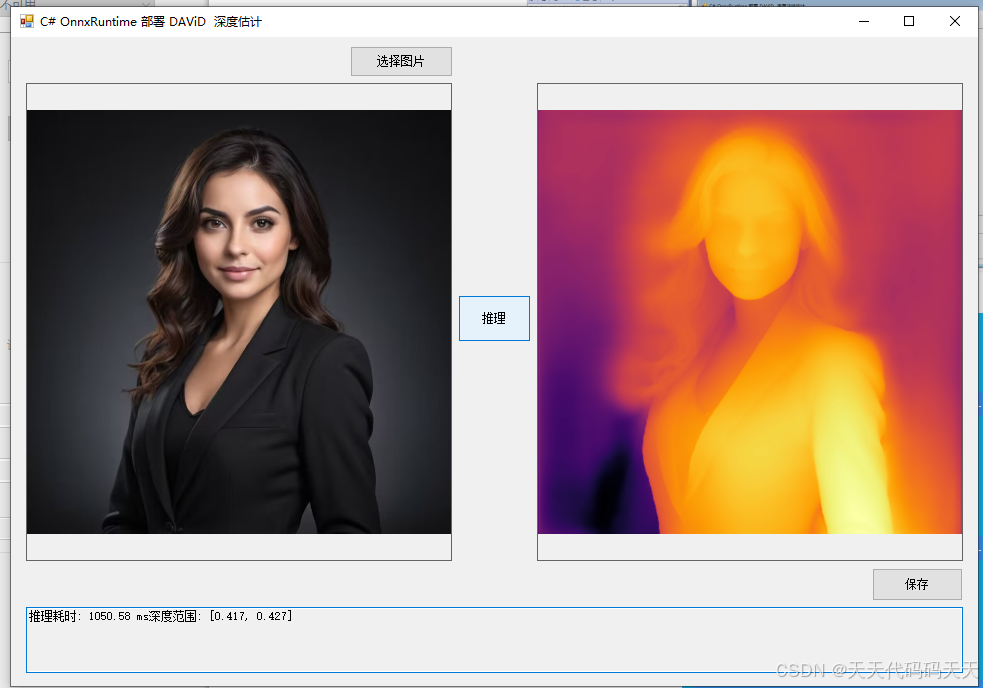
效果
模型信息
Model Properties
metadata:{}
Inputs
name:input
tensor:Float-1, 3, 512, 512
Outputs
name:output
tensor:Float-1, 512, 512
项目
代码
using Microsoft.ML.OnnxRuntime;
using Microsoft.ML.OnnxRuntime.Tensors;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
using System.Windows.Forms;
namespace Onnx_Demo
{
public partial class Form1 : Form
{
// ----- 深度估计专用字段 -----
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.png";
string image_path = "";
string startupPath;
DateTime dt1 = DateTime.Now;
DateTime dt2 = DateTime.Now;
string model_path;
Mat image; // 原始图像(BGR)
Mat depth_color_map; // 生成的深度彩色图
SessionOptions options;
InferenceSession onnx_session;
Tensor<float> input_tensor;
List<NamedOnnxValue> input_container;
IDisposableReadOnlyCollection<DisposableNamedOnnxValue> result_infer;
int inpHeight = 512, inpWidth = 512;
bool inverse_depth = false; // 是否反转深度(近处亮)
public Form1()
{
InitializeComponent();
}
// ----- 按钮1:选择图片 -----
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
image_path = ofd.FileName;
pictureBox1.Image = new Bitmap(image_path);
textBox1.Text = "";
image = new Mat(image_path);
pictureBox2.Image = null;
depth_color_map = null;
}
// ----- 按钮2:执行深度估计推理 -----
private void button2_Click(object sender, EventArgs e)
{
if (string.IsNullOrEmpty(image_path))
{
MessageBox.Show("请先选择图片!");
return;
}
button2.Enabled = false;
pictureBox2.Image = null;
textBox1.Text = "";
Application.DoEvents();
// 读取原始图像(BGR)
image = new Mat(image_path);
int originalWidth = image.Cols;
int originalHeight = image.Rows;
// ------------------ 预处理 ------------------
// 1. 缩放至模型输入尺寸 512x512
Mat resized = new Mat();
Cv2.Resize(image, resized, new OpenCvSharp.Size(inpWidth, inpHeight));
// 2. 转换为浮点型并归一化到 0,1
resized.ConvertTo(resized, MatType.CV_32FC3, 1.0 / 255.0);
// 3. 分离 BGR 通道,并按 RGB 顺序填充(模型预期 RGB)
Mat\[\] channels = Cv2.Split(resized); // channels0=B, 1=G, 2=R
int channelSize = inpHeight * inpWidth;
float\[\] inputData = new float3 \* channelSize;
// 将 B,G,R 重新排列为 R,G,B
for (int c = 0; c < 3; c++)
{
float\[\] channelData = new floatchannelSize;
System.Runtime.InteropServices.Marshal.Copy(channelsc.Data, channelData, 0, channelSize);
int targetIndex = (c == 0) ? 2 : (c == 2) ? 0 : 1; // B->2, G->1, R->0
Array.Copy(channelData, 0, inputData, targetIndex * channelSize, channelSize);
}
// 4. 创建输入张量
input_tensor = new DenseTensor<float>(inputData, new\[\] { 1, 3, inpHeight, inpWidth });
input_container.Clear();
input_container.Add(NamedOnnxValue.CreateFromTensor("input", input_tensor));
// ------------------ 推理 ------------------
dt1 = DateTime.Now;
result_infer = onnx_session.Run(input_container);
dt2 = DateTime.Now;
// 获取输出
var output = result_infer.First(x => x.Name == "output").AsTensor<float>();
var dimensions = output.Dimensions.ToArray();
int outH = dimensions.Length >= 2 ? dimensionsdimensions.Length - 2 : inpHeight;
int outW = dimensions.Length >= 1 ? dimensionsdimensions.Length - 1 : inpWidth;
float\[\] depthFloat = output.ToArray();
// 创建单通道深度 Mat (CV_32FC1)
Mat depthRaw = new Mat(outH, outW, MatType.CV_32FC1);
System.Runtime.InteropServices.Marshal.Copy(depthFloat, 0, depthRaw.Data, depthFloat.Length);
// ------------------ 后处理 ------------------
// 1. 双线性插值至原始尺寸
Mat depthResized = new Mat();
Cv2.Resize(depthRaw, depthResized, new OpenCvSharp.Size(originalWidth, originalHeight), interpolation: InterpolationFlags.Linear);
// 2. 反转深度(使近处物体更亮)
if (inverse_depth)
{
Cv2.Subtract(1.0, depthResized, depthResized);
}
// 3. 归一化深度到 0,1 用于彩色映射
double minVal, maxVal;
Cv2.MinMaxLoc(depthResized, out minVal, out maxVal);
float range = (float)(maxVal - minVal);
if (range < 1e-6) range = 1e-6f;
Mat depthNorm = new Mat();
depthResized.ConvertTo(depthNorm, MatType.CV_32FC1, 1.0 / range, -minVal / range);
Cv2.Min(depthNorm, 1.0, depthNorm);
Cv2.Max(depthNorm, 0.0, depthNorm);
// 4. 转换为 8-bit 灰度图
Mat depthGray = new Mat();
depthNorm.ConvertTo(depthGray, MatType.CV_8UC1, 255.0);
// 5. 应用热力图(Inferno 风格)
depth_color_map = new Mat();
Cv2.ApplyColorMap(depthGray, depth_color_map, ColormapTypes.Inferno);
// 显示结果
pictureBox2.Image = new Bitmap(depth_color_map.ToMemoryStream());
textBox1.Text = $"推理耗时: {(dt2 - dt1).TotalMilliseconds:F2} ms\n深度范围: {minVal:F3}, {maxVal:F3}";
button2.Enabled = true;
}
// ----- 按钮3:保存深度彩色图 -----
private void button3_Click(object sender, EventArgs e)
{
if (depth_color_map == null || depth_color_map.Empty())
{
MessageBox.Show("请先执行深度估计!");
return;
}
SaveFileDialog sdf = new SaveFileDialog();
sdf.Title = "保存深度彩色图";
sdf.Filter = "PNG图片 (*.png)|*.png|JPEG图片 (*.jpg)|*.jpg|BMP图片 (*.bmp)|*.bmp";
sdf.FilterIndex = 1;
if (sdf.ShowDialog() == DialogResult.OK)
{
Cv2.ImWrite(sdf.FileName, depth_color_map);
MessageBox.Show($"保存成功: {sdf.FileName}");
}
}
// ----- 窗体加载:初始化 ONNX 模型 -----
private void Form1_Load(object sender, EventArgs e)
{
startupPath = Application.StartupPath;
// 深度估计模型路径(请根据实际位置修改)
model_path = System.IO.Path.Combine(startupPath, "model", "depth-model-vitb16_384.onnx");
if (!System.IO.File.Exists(model_path))
{
MessageBox.Show($"模型文件不存在: {model_path}\n请将模型放置于 {startupPath}\\model\\ 目录下");
return;
}
options = new SessionOptions();
options.LogSeverityLevel = OrtLoggingLevel.ORT_LOGGING_LEVEL_INFO;
options.AppendExecutionProvider_CPU(0);
// 若需 CUDA,可取消注释
// options.AppendExecutionProvider_CUDA(0);
onnx_session = new InferenceSession(model_path, options);
input_container = new List<NamedOnnxValue>();
// 可选默认测试图片
string testImg = System.IO.Path.Combine(startupPath, "test_img", "0.jpg");
if (System.IO.File.Exists(testImg))
{
image_path = testImg;
pictureBox1.Image = new Bitmap(image_path);
image = new Mat(image_path);
}
}
// ----- 双击图片放大(保留原功能)-----
private void pictureBox1_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox1.Image);
}
private void pictureBox2_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox2.Image);
}
}
}
using Microsoft.ML.OnnxRuntime;
using Microsoft.ML.OnnxRuntime.Tensors;
using OpenCvSharp;
using System;
using System.Collections.Generic;
using System.Drawing;
using System.Linq;
using System.Windows.Forms;
namespace Onnx_Demo
{
public partial class Form1 : Form
{
// ----- 深度估计专用字段 -----
string fileFilter = "*.*|*.bmp;*.jpg;*.jpeg;*.tiff;*.png";
string image_path = "";
string startupPath;
DateTime dt1 = DateTime.Now;
DateTime dt2 = DateTime.Now;
string model_path;
Mat image; // 原始图像(BGR)
Mat depth_color_map; // 生成的深度彩色图
SessionOptions options;
InferenceSession onnx_session;
Tensor<float> input_tensor;
List<NamedOnnxValue> input_container;
IDisposableReadOnlyCollection<DisposableNamedOnnxValue> result_infer;
int inpHeight = 512, inpWidth = 512;
bool inverse_depth = false; // 是否反转深度(近处亮)
public Form1()
{
InitializeComponent();
}
// ----- 按钮1:选择图片 -----
private void button1_Click(object sender, EventArgs e)
{
OpenFileDialog ofd = new OpenFileDialog();
ofd.Filter = fileFilter;
if (ofd.ShowDialog() != DialogResult.OK) return;
pictureBox1.Image = null;
image_path = ofd.FileName;
pictureBox1.Image = new Bitmap(image_path);
textBox1.Text = "";
image = new Mat(image_path);
pictureBox2.Image = null;
depth_color_map = null;
}
// ----- 按钮2:执行深度估计推理 -----
private void button2_Click(object sender, EventArgs e)
{
if (string.IsNullOrEmpty(image_path))
{
MessageBox.Show("请先选择图片!");
return;
}
button2.Enabled = false;
pictureBox2.Image = null;
textBox1.Text = "";
Application.DoEvents();
// 读取原始图像(BGR)
image = new Mat(image_path);
int originalWidth = image.Cols;
int originalHeight = image.Rows;
// ------------------ 预处理 ------------------
// 1. 缩放至模型输入尺寸 512x512
Mat resized = new Mat();
Cv2.Resize(image, resized, new OpenCvSharp.Size(inpWidth, inpHeight));
// 2. 转换为浮点型并归一化到 [0,1]
resized.ConvertTo(resized, MatType.CV_32FC3, 1.0 / 255.0);
// 3. 分离 BGR 通道,并按 RGB 顺序填充(模型预期 RGB)
Mat[] channels = Cv2.Split(resized); // channels[0]=B, [1]=G, [2]=R
int channelSize = inpHeight * inpWidth;
float[] inputData = new float[3 * channelSize];
// 将 B,G,R 重新排列为 R,G,B
for (int c = 0; c < 3; c++)
{
float[] channelData = new float[channelSize];
System.Runtime.InteropServices.Marshal.Copy(channels[c].Data, channelData, 0, channelSize);
int targetIndex = (c == 0) ? 2 : (c == 2) ? 0 : 1; // B->2, G->1, R->0
Array.Copy(channelData, 0, inputData, targetIndex * channelSize, channelSize);
}
// 4. 创建输入张量
input_tensor = new DenseTensor<float>(inputData, new[] { 1, 3, inpHeight, inpWidth });
input_container.Clear();
input_container.Add(NamedOnnxValue.CreateFromTensor("input", input_tensor));
// ------------------ 推理 ------------------
dt1 = DateTime.Now;
result_infer = onnx_session.Run(input_container);
dt2 = DateTime.Now;
// 获取输出
var output = result_infer.First(x => x.Name == "output").AsTensor<float>();
var dimensions = output.Dimensions.ToArray();
int outH = dimensions.Length >= 2 ? dimensions[dimensions.Length - 2] : inpHeight;
int outW = dimensions.Length >= 1 ? dimensions[dimensions.Length - 1] : inpWidth;
float[] depthFloat = output.ToArray();
// 创建单通道深度 Mat (CV_32FC1)
Mat depthRaw = new Mat(outH, outW, MatType.CV_32FC1);
System.Runtime.InteropServices.Marshal.Copy(depthFloat, 0, depthRaw.Data, depthFloat.Length);
// ------------------ 后处理 ------------------
// 1. 双线性插值至原始尺寸
Mat depthResized = new Mat();
Cv2.Resize(depthRaw, depthResized, new OpenCvSharp.Size(originalWidth, originalHeight), interpolation: InterpolationFlags.Linear);
// 2. 反转深度(使近处物体更亮)
if (inverse_depth)
{
Cv2.Subtract(1.0, depthResized, depthResized);
}
// 3. 归一化深度到 [0,1] 用于彩色映射
double minVal, maxVal;
Cv2.MinMaxLoc(depthResized, out minVal, out maxVal);
float range = (float)(maxVal - minVal);
if (range < 1e-6) range = 1e-6f;
Mat depthNorm = new Mat();
depthResized.ConvertTo(depthNorm, MatType.CV_32FC1, 1.0 / range, -minVal / range);
Cv2.Min(depthNorm, 1.0, depthNorm);
Cv2.Max(depthNorm, 0.0, depthNorm);
// 4. 转换为 8-bit 灰度图
Mat depthGray = new Mat();
depthNorm.ConvertTo(depthGray, MatType.CV_8UC1, 255.0);
// 5. 应用热力图(Inferno 风格)
depth_color_map = new Mat();
Cv2.ApplyColorMap(depthGray, depth_color_map, ColormapTypes.Inferno);
// 显示结果
pictureBox2.Image = new Bitmap(depth_color_map.ToMemoryStream());
textBox1.Text = $"推理耗时: {(dt2 - dt1).TotalMilliseconds:F2} ms\n深度范围: [{minVal:F3}, {maxVal:F3}]";
button2.Enabled = true;
}
// ----- 按钮3:保存深度彩色图 -----
private void button3_Click(object sender, EventArgs e)
{
if (depth_color_map == null || depth_color_map.Empty())
{
MessageBox.Show("请先执行深度估计!");
return;
}
SaveFileDialog sdf = new SaveFileDialog();
sdf.Title = "保存深度彩色图";
sdf.Filter = "PNG图片 (*.png)|*.png|JPEG图片 (*.jpg)|*.jpg|BMP图片 (*.bmp)|*.bmp";
sdf.FilterIndex = 1;
if (sdf.ShowDialog() == DialogResult.OK)
{
Cv2.ImWrite(sdf.FileName, depth_color_map);
MessageBox.Show($"保存成功: {sdf.FileName}");
}
}
// ----- 窗体加载:初始化 ONNX 模型 -----
private void Form1_Load(object sender, EventArgs e)
{
startupPath = Application.StartupPath;
// 深度估计模型路径(请根据实际位置修改)
model_path = System.IO.Path.Combine(startupPath, "model", "depth-model-vitb16_384.onnx");
if (!System.IO.File.Exists(model_path))
{
MessageBox.Show($"模型文件不存在: {model_path}\n请将模型放置于 {startupPath}\\model\\ 目录下");
return;
}
options = new SessionOptions();
options.LogSeverityLevel = OrtLoggingLevel.ORT_LOGGING_LEVEL_INFO;
options.AppendExecutionProvider_CPU(0);
// 若需 CUDA,可取消注释
// options.AppendExecutionProvider_CUDA(0);
onnx_session = new InferenceSession(model_path, options);
input_container = new List<NamedOnnxValue>();
// 可选默认测试图片
string testImg = System.IO.Path.Combine(startupPath, "test_img", "0.jpg");
if (System.IO.File.Exists(testImg))
{
image_path = testImg;
pictureBox1.Image = new Bitmap(image_path);
image = new Mat(image_path);
}
}
// ----- 双击图片放大(保留原功能)-----
private void pictureBox1_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox1.Image);
}
private void pictureBox2_DoubleClick(object sender, EventArgs e)
{
Common.ShowNormalImg(pictureBox2.Image);
}
}
}