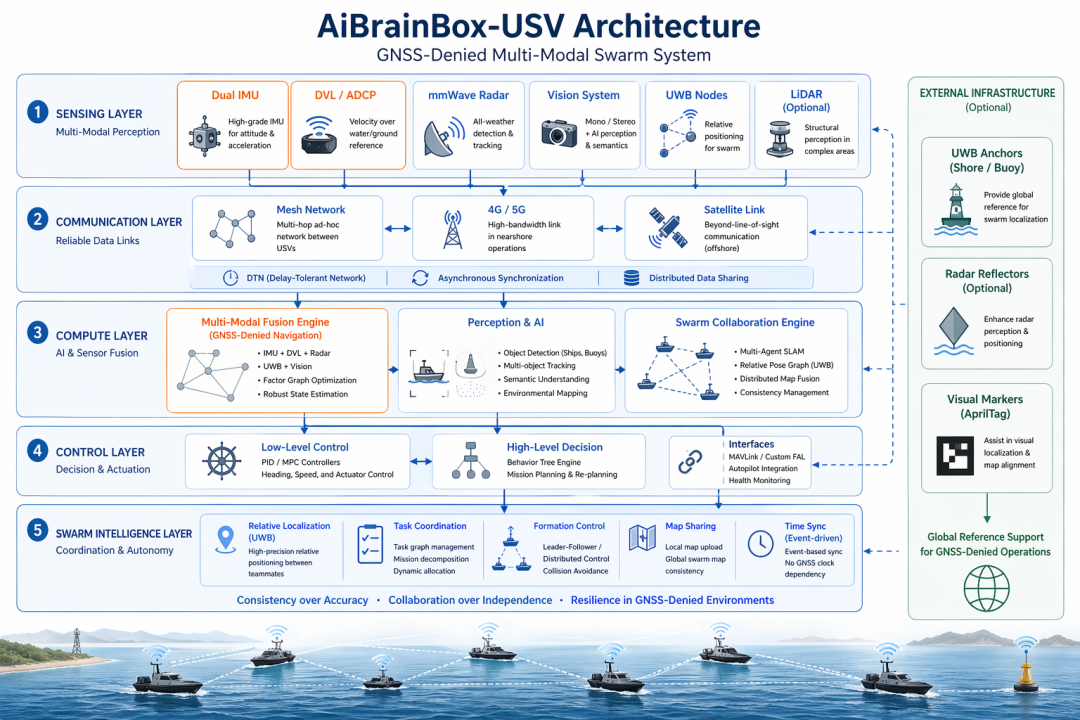
AiBrainBox-USV 通感算控一体化集群架构(GNSS拒止环境)
AiBrainBox-USV
USV(无人水面艇)的GNSS拒止难度,比UAV/UGV更高一档
------因为水面环境存在"低特征 + 强反射 + 动态扰动(浪/流)
GNSS拒止 + 水面低特征环境 + 多艇协同一致性
-
UAV → 视野好,VIO容易
-
UGV → 有结构(道路/墙)
-
USV → 几乎没有稳定视觉特征 + 水面动态
👉 结论:
USV不能依赖单一视觉或激光雷达,必须走"多模态约束融合 + 外部参照体系"
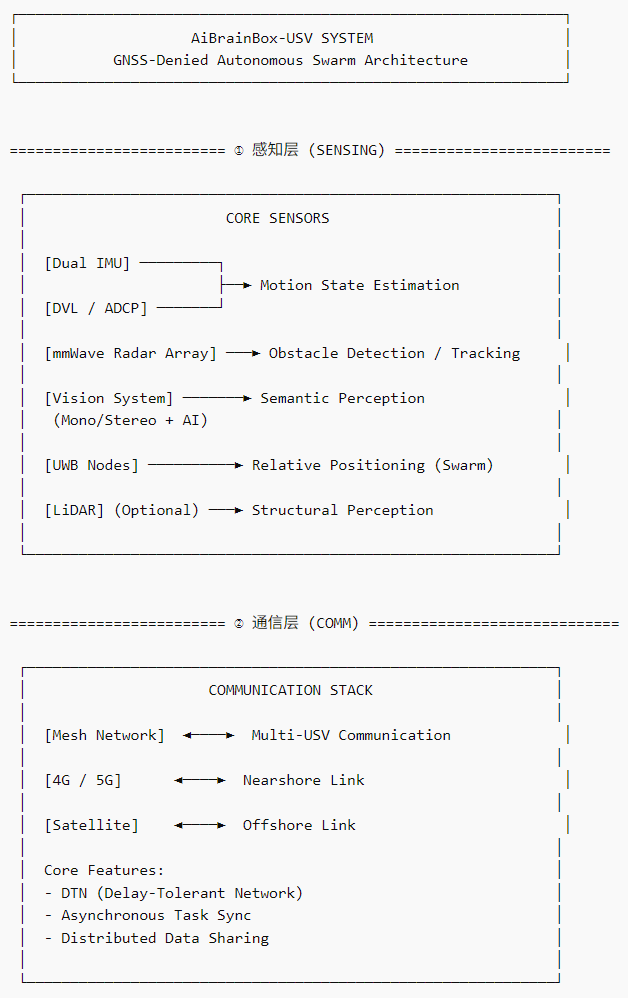
传感器
1️⃣ 主定位传感器(核心层)
(1)高等级 IMU
-
等级:战术级(≥0.1°/hr bias instability)
-
作用:
-
短时主导定位(抗GNSS)
-
抵抗波浪引起的高频扰动
-
-
建议:
- 双IMU冗余(正交布置)
- 支持故障检测
👉 USV比UGV更依赖IMU
(2)多普勒测速
A:水体参考(DVL)
-
水下多普勒测速
-
提供相对水体速度
B:地面参考(ADCP / Bottom Track DVL)
- 浅水区可直接对地测速
👉 强烈建议:
至少配置一种"速度观测源",否则INS会发散
(3)毫米波雷达(主感知 + 弱定位)
-
作用:
-
障碍物检测(船、浮标)
-
相对定位(多艇之间)
-
-
优势:
- 抗雾、抗雨、夜间稳定
-
建议:
-
77GHz优先(分辨率更高)
-
支持多目标跟踪
-
2️⃣ 环境感知层
(4)激光雷达
-
使用场景:
- 港口 / 近岸 / 桥梁环境
-
限制:
- 开阔水面价值有限(无点云结构)
👉 建议:
选配,不作为主定位
(5)视觉系统
-
主要作用:
-
目标识别(船只、障碍物)
-
语义理解(航道、码头)
-
辅助定位(岸线特征匹配)
-
👉 推荐:
-
多目环视 + AI
-
可加偏振相机(减少水面反射)
(6)UWB
-
用于:
-
多USV之间相对定位
-
编队保持
-
-
优势:
-
不依赖环境特征
-
GNSS拒止下极其稳定
-
👉 建议:
每艇2-3节点 UWB(形成UWB协同定位网络)
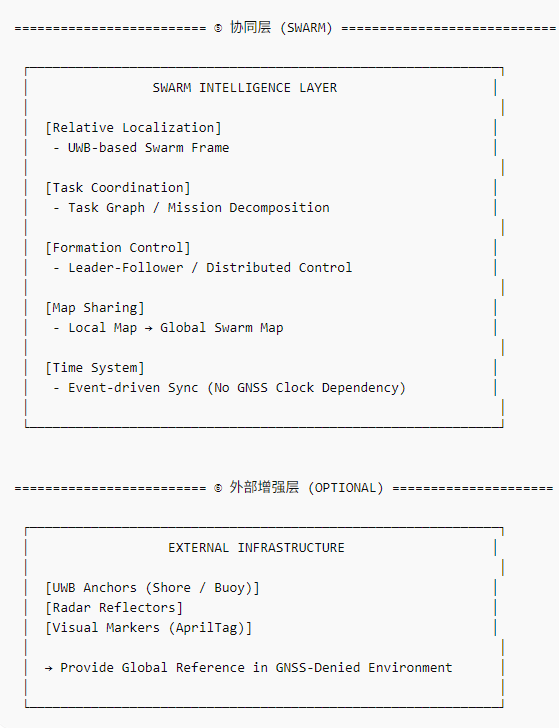
3️⃣ 外部参考
(7)岸基/浮标定位节点
-
可部署:
-
UWB Anchor
-
雷达反射标
-
视觉标志(AprilTag)
-
👉 作用:
-
提供"全局坐标锚点"
-
解决漂移问题
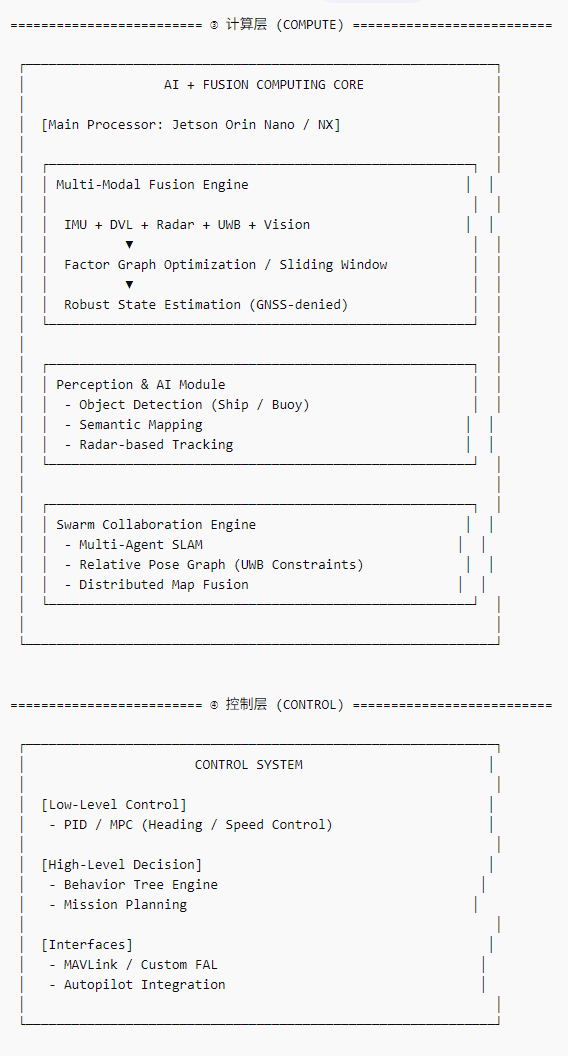
融合定位算法:
1️⃣ 融合定位(核心)
-
IMU + DVL + Radar + UWB + Vision
-
方法:
-
因子图(Factor Graph)
-
滑动窗口优化
-
2️⃣ 水面SLAM(可选)
-
只在:
- 港口 / 内河
-
方法:
-
Radar SLAM
-
Semantic SLAM
-
3️⃣ 多艇协同定位
-
分布式融合:
- 通信共享
- UWB约束
- 每艇局部图
👉 本质:
Multi-agent SLAM
通信层(Comm)
1️⃣ 主链路
-
自组网(Mesh)
-
频段:
- 900MHz / 1.4GHz(远距离)
2️⃣ 辅助链路
-
4G/5G(近岸)
-
卫星(远海)
集群核心能力
1️⃣ 坐标系统一
方法组合:
-
UWB相对坐标
-
初始对齐(起始GNSS or 人工)
-
回环检测(视觉 / 雷达)
👉 推荐:
分层坐标:
-
Local frame(每艇)
-
Swarm frame(集群)
-
Global(可选)
2️⃣ 编队控制
-
Leader-Follower
-
或分布式控制
3️⃣ 任务协同
-
任务链(Task Graph)
-
时间同步(软同步 + 事件驱动)
AiBrainBox-USV 总体架构图(通·感·算·控·协同)