Boxer: Robust Lifting of Open-World 2D Bounding Boxes to 3D
Boxer lifts 2D object detections into static, global, fused 3D oriented bounding boxes (OBBs) from posed images and semi-dense point clouds, focused on indoor object detection. This repo contains the code and pre-trained model (no training code) needed to run Boxer on a variety of input data sources (inference only code).
We tested on MacOS (with mps acceleration) and Fedora (with CUDA acceleration).
复制代码
# Install uv (https://docs.astral.sh/uv/)
curl -LsSf https://astral.sh/uv/install.sh | sh
# Create virtual environment with uv
uv venv boxer --python 3.12
source boxer/bin/activate
# Core dependencies for running Boxer
uv pip install 'torch>=2.0' numpy opencv-python tqdm dill
# To support Project Aria loading
uv pip install projectaria-tools
# 3D interactive viewer for view_*.py scripts
uv pip install moderngl moderngl-window imgui-bundle
Download Model Checkpoints
We host model checkpoints for BoxerNet, DinoV3 and OWLv2 on HuggingFace. Download them to the ckpts/ directory:
复制代码
bash scripts/download_ckpts.sh
Download Sample Project Aria Data
In this repo, we provide sample code for running on the following data sources:
Project Aria Gen 1 & 2
CA-1M
SUN-RGBD
ScanNet (manual download needed)
Let's first start with Aria data. We host three sample Project Aria sequences (hohen_gen1, nym10_gen1, cook0_gen2) on HuggingFace. Download them to the sample_data/ directory:
复制代码
bash scripts/download_aria_data.sh
Demo #1: Hello World / Run BoxerNet in headless mode
For this first demo, you do not need to have a display, so it will work if you are SSH'ed into a server. This will run BoxerNet on the first 90 images of a sequence from the test set of the NymeriaPlus dataset. This will confirm we can load up the data and run a forward passes with the model alongside the online tracker.
Expected to take ~2 mins on mac MPS, <15 secs on CUDA.
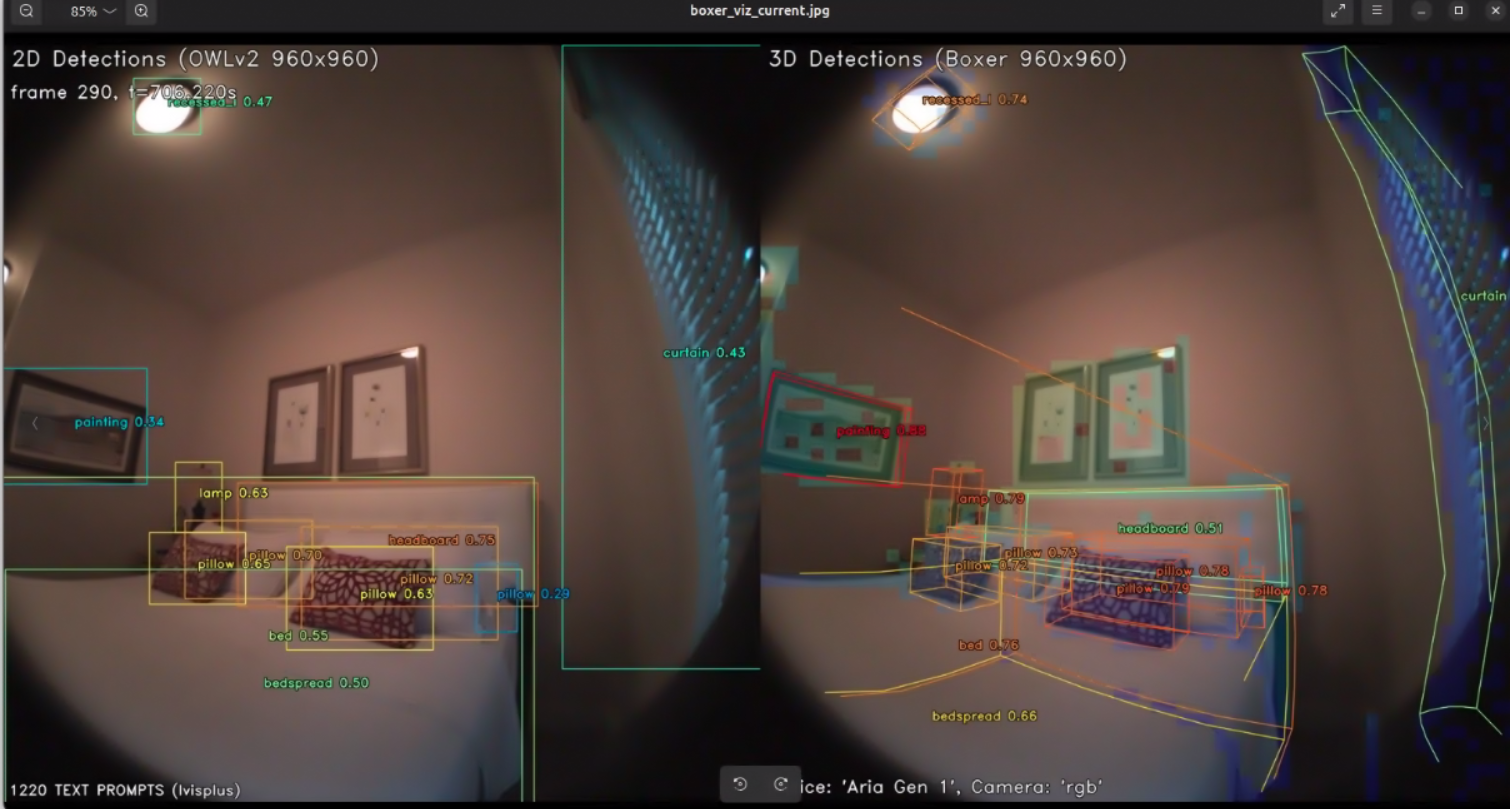
This will dump out static images and a video to outputs/nym10_gen1/, e.g. something like this in outputs/nym10_gen1/boxer_viz_current.png
Demo #2: BoxerNet Interactive Demo on Aria Data
For this demo, you need to have a valid display to have the GUI work. This demo allows you to create 2DBB prompts and enter text to prompt OWL to detect objects. Run it like:
复制代码
python view_prompt.py --input nym10_gen1
You should see a window that looks like this:
You can also run it on the other Project Aria sequences:
python view_prompt.py --input hohen_gen1
python view_prompt.py --input cook0_gen2
Demo #3: Visualize Offline Fusion
Make sure to run Demo #1 first. This generates 2DBB and 3DBB csv files, for example:
output/nym10_gen1/boxer_3dbbs.csv
output/nym10_gen1/owl_2dbbs.csv
Then, run the fusion script, which will by default search the above paths, to load and fuse the 3DBBs from above.
复制代码
python view_fusion.py --input nym10_gen1
You should see a window like this:
Demo #4: Online Tracker (requires Demo #1)
Make sure to run Demo #1 above first to generate the 2DBB and 3DBB CSVs. Run the online tracker, which will estimate 3DBBs on the fly as new images are observed:
Extract a sample validation sequence (ca1m-val-42898570) to sample_data/
复制代码
python scripts/download_ca1m_sample.py
Run the view_prompt.py script on it:
复制代码
python view_prompt.py --input ca1m-val-42898570
You should see a window like this:
Demo #6: Running on SUN-RGBD data
Download a subset of Omni3D SUN-RGBD: extract 20 sample images to sample_data/
复制代码
python scripts/download_omni3d_sample.py
Run the view_prompt.py script on it:
复制代码
python view_prompt.py --input SUNRGBD
You should see a window like this:
Demo #7: Running on ScanNet data
ScanNet must be manually downloaded from https://github.com/scannet/scannet. Once you do that, place the scene directory in sample_data/, e.g. sample_data/scene0707_00
Run just like the above examples:
复制代码
python view_prompt.py --input scene0707_00
run_boxer.py Usage Details
The pipeline supports optional online 3D tracking (--track) for temporal consistency and offline 3D fusion (--fuse) for merging detections across frames after all detections have been made.
复制代码
# Run on a sample Aria sequence
python run_boxer.py --input hohen_gen1
# Disable visualization (faster, just writes CSV)
python run_boxer.py --input hohen_gen1 --skip_viz
# Custom text prompts
python run_boxer.py --input hohen_gen1 --labels=chair,table,lamp
# Run with online 3D tracking
python run_boxer.py --input hohen_gen1 --track
# Run with post-hoc 3D box fusion
python run_boxer.py --input hohen_gen1 --fuse
# ScanNet sequence
python run_boxer.py --input scene0084_02
# CA-1M sequence
python run_boxer.py --input ca1m-val-42898570
# Omni3D dataset
python run_boxer.py --input SUNRGBD
# Adjust thresholds
python run_boxer.py --input hohen_gen1 --thresh2d 0.3 --thresh3d 0.6
# Force a specific precision (auto-detects bfloat16 on supported CUDA GPUs)
python run_boxer.py --input hohen_gen1 --force_precision float32
Outputs
Results are written to output/<sequence_name>/:
boxer_3dbbs.csv --- per-frame 3D bounding boxes
owl_2dbbs.csv --- per-frame 2D detections
boxer_3dbbs_tracked.csv --- tracked 3D boxes (with --track)
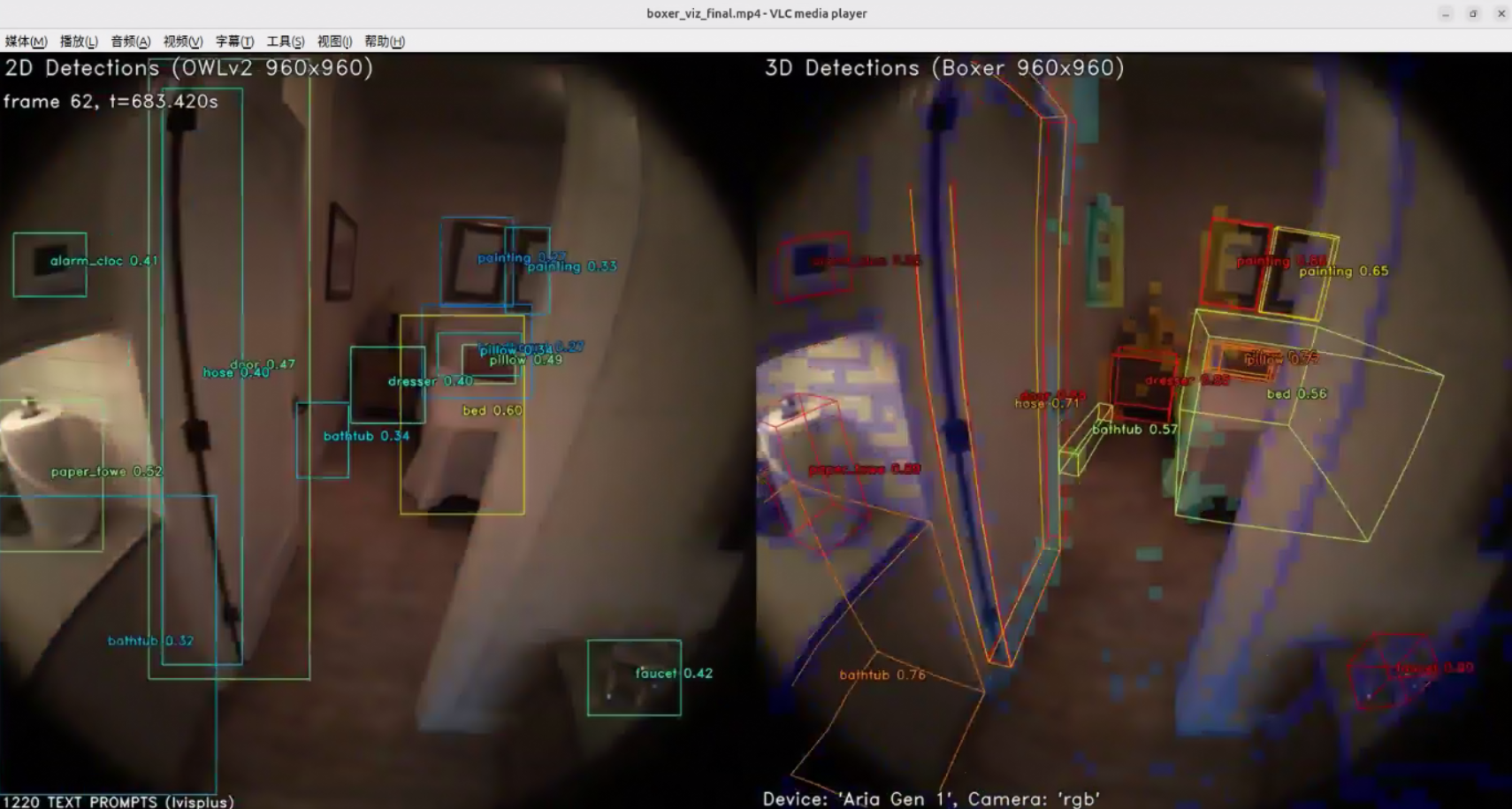
boxer_viz_final.mp4 --- visualization video
CLI Reference
Flag
Default
Description
--input
Path to input sequence
--detector
owl
2D detector (owl)
--labels
lvisplus
Comma-separated text prompts, or a taxonomy name
--thresh2d
0.2
2D detection confidence threshold
--thresh3d
0.5
3D box confidence threshold
--track
off
Enable online 3D box tracking
--fuse
off
Run post-hoc 3D box fusion
--skip_viz
off
Disable visualization (on by default)
--force_precision
auto
Override inference precision (float32 or bfloat16). Auto-detects bfloat16 on supported CUDA GPUs
For the minimal single image lifting with BoxerNet, we require:
image
intrinsics calibration (we tested with both Pinhole and Fisheye624 camera models)
the 3D gravity direction
Depth is optional but improves performance significantly
For lifting a video sequence we need the same as above plus:
full 6 DoF pose for each image
FAQ
Q: Can I run it on an arbitrary image without any other info? A: Theoretically yes, but you would need to estimate the intrinsics and gravity direction. We didn't test that.
Q: Do you plan to release the training or evaluation code? A: No, we do not, because that would require more long-term maintenance from the authors. You can email the first author or leave a GitHub issue if you have any questions about re-implementing the training/evaluation pipeline, but our response may be slow.
Q: Does it work on a Windows machine? A: We did not test it, but running the core model should work.
uv pip install ruff
# Check for lint errors
ruff check .
# Auto-fix lint errors
ruff check --fix .
# Format code
ruff format .
Testing
复制代码
uv pip install pytest pytest-cov
# Run all tests
bash tests/run_tests.sh
# Run a single test file
bash tests/run_tests.sh test_gravity
# Run without opening the coverage report
bash tests/run_tests.sh --no-open
Citation
If you find Boxer useful in your research, please consider citing:
复制代码
@article{boxer2026,
title={Boxer: Robust Lifting of Open-World 2D Bounding Boxes to 3D},
author={Daniel DeTone and Tianwei Shen and Fan Zhang and Lingni Ma and Julian Straub and Richard Newcombe and Jakob Engel},
year={2026},
}
License
The majority of Boxer is licensed under CC-BY-NC. See the file for details. However portions of the project are available under separate license terms: see .