关键术语表
- CA (Cellular Automaton): 元胞自动机。一个离散的计算模型,由一个规则的网格单元(元胞)组成,每个元胞都有一个有限的状态。
- GoL (Game of Life): 康威生命游戏。最著名的二维元胞自动机之一。
- MAS (Multi-Agent System): 多智能体系统。由多个交互的、自主的智能计算实体(智能体)组成的计算系统。
- ECA (Empowered Cellular Automaton): 赋能型元胞自动机。本文提出的核心框架,是对经典元胞自动机的系统性扩展,使其适用于目标导向的多智能体编排。
- B3/S23: 生命游戏的核心规则。"一个死元胞,如果邻居恰好为3个活元胞,则诞生(Births 3);一个活元胞,如果邻居数量为2或3,则存活(Survives 2, 3)。"
- Orchestration (编排): 通常指一种集中式的控制模式,由一个中心协调器指挥所有部分的行动。
- Choreography (编舞): 通常指一种去中心化的协作模式,各个部分根据局部规则和相互通信自行协调行动,无中心指挥。本文探讨的模式更接近于"编舞"。
序章:从细胞到蜂群------一个计算思想的伟大迁徙
1970年,数学家约翰·康威(John Conway)设计了一个没有玩家的"游戏"。在无垠的二维方格世界里,生命以最纯粹的数字形式存在,遵循着四条铁律般的简单规则。生命的起落、繁衍与迁徙,构成了一幅幅令人着迷的、永恒演化的画卷。这便是"康威生命游戏"------一个数字化的培养皿,向我们揭示了宇宙深处最深刻的秘密之一:极其简单的局部规则,可以涌现出难以想象的全局复杂性。
半个世纪后的今天,我们站在人工智能与分布式系统的前沿,面临着同样深刻的挑战:如何协调成千上万的无人机,让它们如星椋鸟群般同步飞行,执行复杂的侦察任务?如何调度一个城市的自动驾驶车队,让它们像蚁群一样高效、无冲突地穿梭,形成智慧的交通流?如何管理一个智能电网,让亿万个设备节点像生物细胞一样协同工作,动态平衡能源供需?
这些问题的核心,是**大规模多智能体的编排(Orchestration)**问题。传统的集中式控制方法,在面对如此庞大的规模、高度的动态性和不可预测的环境时,正变得力不从心。一个中心的"大脑"难以处理海量的实时信息,也构成了系统的单点故障风险。
此刻,我们不禁回望康威的那个数字培养皿,并提出一个大胆的设想:我们能否将这个'培养皿'放大到整个世界,让其中的'细胞'进化为无人机、自动驾驶汽车、甚至智能电网中的节点,并赋予它们共同的'使命'?
这不仅是一个技术问题,更是一个关于智能、秩序与创造的哲学探索。它要求我们回答一系列根本性的问题:如何将一个被动演化、没有目标的数学模型,改造为一个能够主动协作、完成复杂任务的工程框架?如何为这些数字"细胞"赋予感知、沟通和决策的能力?我们又该如何设计新的"物理定律",即交互规则,来引导它们涌现出我们期望的、有益的全局行为?
本文将系统性地回答这些问题。我们将开启一次智力上的远征,从康威生命游戏的第一性原理出发,一步步为其"增添血肉"、"注入灵魂",构建一个我们称之为 "赋能型元胞自动机"(Empowered Cellular Automaton, ECA) 的全新框架。这不仅仅是对生命游戏的简单模仿,而是一场深刻的工程化革命。
从细胞到蜂群的伟大迁行:
- 坚实的理论基础:深入剖析康威生命游戏与多智能体系统的核心思想与内在矛盾。
- 完整的设计哲学:详细阐述ECA框架如何从"细胞"、"邻域"、"规则"三个维度对经典元胞自动机进行根本性扩展。
- 可复现的工程实践:提供一个基于ECA框架的、从零开始构建的"无人机蜂群资源搜集"仿真系统,包含完整的架构设计、代码实现和涌现行为分析。
- 前瞻性的深度思考:探讨该框架在可扩展性、自适应学习、安全性等方面的挑战与未来方向。
第一部分:理论基石------两大世界的思想碰撞
在构建新的大厦之前,我们必须对它的基石有最深刻的理解。本部分将分别深入探讨康威生命游戏和多智能体系统这两个看似无关的世界,并揭示它们思想碰撞时产生的核心矛盾------这正是我们后续所有工作的起点。
第一章:康威生命游戏:宇宙的终极代码?
1.1 元胞自动机的数学之美
元胞自动机(CA)并非单指康威生命游戏,而是一类计算模型的总称。想象一个由无数个方格(元胞)组成的巨大棋盘。这个世界的演化遵循以下几个基本原则:
- 离散空间: 世界被划分为规则的网格,如一维的线、二维的平面或三维的立方体。
- 离散时间: 时间以固定的步长(tick)向前推进。
- 有限状态: 每个元胞在任何时刻都处于一个有限的状态集合中(例如,黑/白,生/死)。
- 局部交互: 每个元愈胞在下一时刻的状态,仅由其自身当前状态和其"邻居"元胞的当前状态决定。
- 时空同质性: 所有元胞在任何时间、任何地点都遵循完全相同的演化规则。
这种极致的简化,使得元胞自动机成为研究"自组织"和"涌现"现象的完美数学工具。它告诉我们,构建复杂的系统,不一定需要复杂的设计蓝图,简单的局部互动就足够了。
1.2 生命游戏的四大规则与经典模式
康威生命游戏是定义在二维方格网格上的元胞自动机,其状态只有两个:"活"(1) 或 "死"(0)。每个元胞的邻居是其周围的8个元胞(即摩尔邻域)。其演化规则简单到可以用一句话概括:
"B3/S23":
- 诞生 (Births) : 一个死 元胞,如果其周围恰好有 3 个活邻居,则在下一时刻变为活元胞。
- 存活 (Survives) : 一个活 元胞,如果其周围有 2 或 3 个活邻居,则在下一时刻保持存活。
- 死亡 (Deaths) :
- 孤单致死 : 一个活 元胞,如果其周围的活邻居少于 2 个,则在下一时刻变为死元胞。
- 拥挤致死 : 一个活 元胞,如果其周围的活邻居多于 3 个,则在下一时刻变为死元胞。
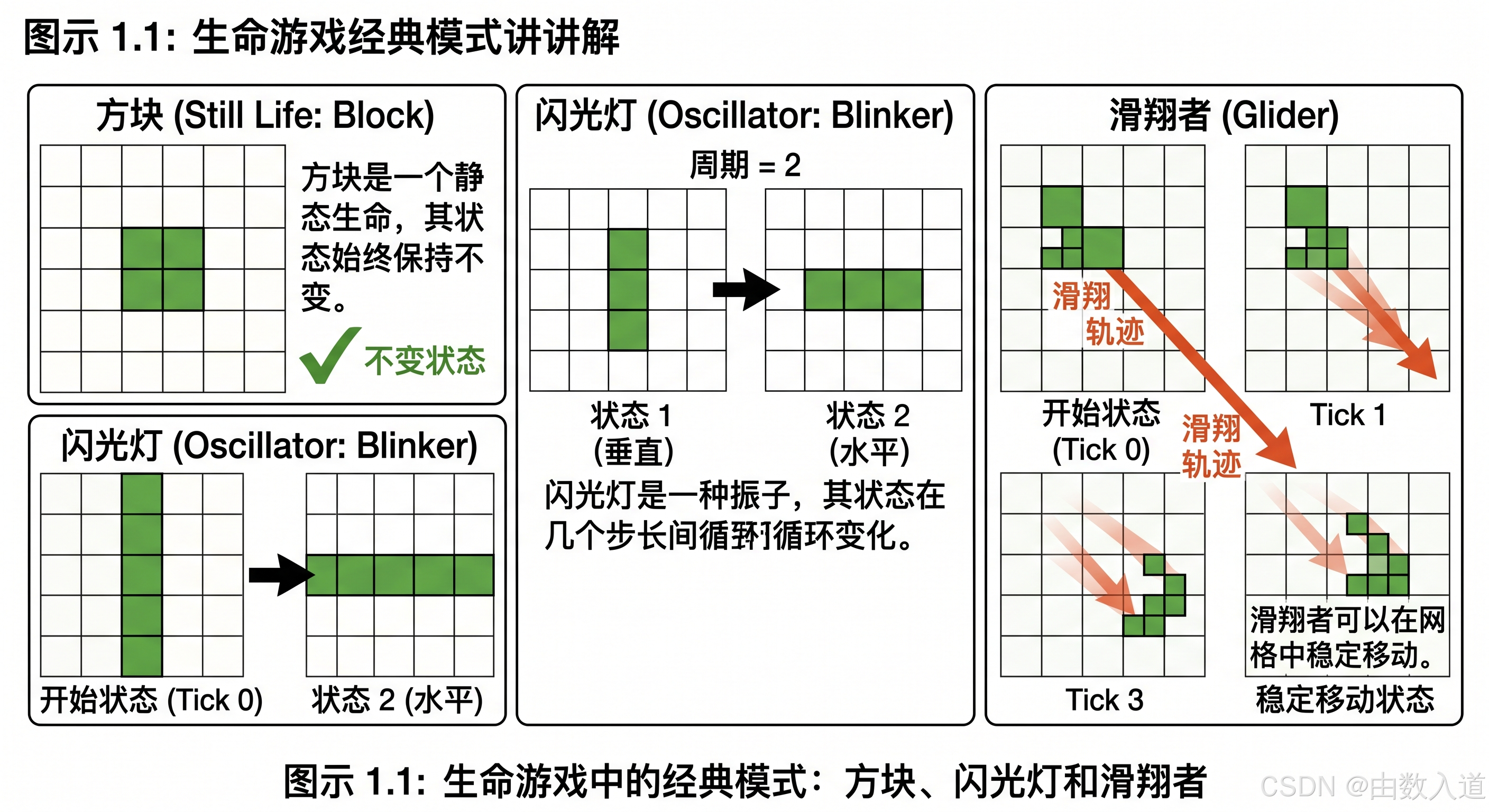
仅仅这四条规则,便创造了一个令人眼花缭乱的数字生态系统:
- 静物 (Still Lifes): 永远保持不变的模式,如"方块"(Block)和"蜂巢"(Beehive)。
- 振子 (Oscillators): 在几个状态之间循环变化的模式,如"闪光灯"(Blinker)和"脉冲星"(Pulsar)。
- 滑翔者 (Gliders): 能够像宇宙飞船一样在网格中稳定移动的模式。这是生命游戏中最著名的模式,它证明了局部规则可以产生宏观上的"移动"和"信息传递"现象。
1.3 代码实践:从零实现一个基础的康威生命游戏
为了直观感受生命游戏的魅力,我们可以用Python和matplotlib库轻松实现一个基础版本。
python
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.animation as animation
# 定义网格大小
GRID_SIZE = 100
# 初始化随机网格
grid = np.random.choice([0, 1], GRID_SIZE*GRID_SIZE, p=[0.8, 0.2]).reshape(GRID_SIZE, GRID_SIZE)
def update_grid(frameNum, img, grid, N):
new_grid = grid.copy()
for i in range(N):
for j in range(N):
# 计算邻居数量,使用周期性边界条件
total = int((grid[i, (j-1)%N] + grid[i, (j+1)%N] +
grid[(i-1)%N, j] + grid[(i+1)%N, j] +
grid[(i-1)%N, (j-1)%N] + grid[(i-1)%N, (j+1)%N] +
grid[(i+1)%N, (j-1)%N] + grid[(i+1)%N, (j+1)%N]))
# 应用康威生命游戏规则 (B3/S23)
if grid[i, j] == 1:
if (total < 2) or (total > 3):
new_grid[i, j] = 0
else:
if total == 3:
new_grid[i, j] = 1
# 更新数据
img.set_data(new_grid)
grid[:] = new_grid[:]
return img,
# 设置动画
fig, ax = plt.subplots()
img = ax.imshow(grid, interpolation='nearest')
ani = animation.FuncAnimation(fig, update_grid, fargs=(img, grid, GRID_SIZE, ),
frames = 100,
interval=50,
save_count=50)
plt.show()运行这段代码,你将亲眼见证一个从随机混沌中诞生、演化并最终走向稳定或消亡的数字生命世界。
1.4 小结:生命游戏带给我们的哲学思考
康威生命游戏不仅仅是一个有趣的程序。它是一种思想的结晶,为我们提供了两个深刻的启示:
- 自下而上的创造力: 复杂的、看似有目的的宏观结构(如滑翔者),完全可以由简单的、无目的的微观规则自下而上地生成。这挑战了传统"必须有中心设计者"的观念。
- 计算的普适性: 生命游戏被证明是图灵完备的,这意味着理论上它可以模拟任何计算机程序。一个由滑翔者和其它模式构成的精密系统,可以实现逻辑门,从而构建出一部完整的计算机。
然而,它的光辉也投下了阴影。这个世界是封闭的、被动的、无目的的。元胞们只是机械地响应邻居,它们没有意图,没有目标,无法与外界交互,更谈不上主动协作去完成一项任务。这正是它与多智能体系统的根本区别。
第二章:多智能体系统:构建分布式智能社会
2.1 智能体的定义
如果说生命游戏中的元胞是"原子",那么在多智能体系统(MAS)中,其基本单位就是"智能体"(Agent)。一个智能体远比一个元胞复杂,它通常具备以下四个核心特性:
- 自主性 (Autonomy): 智能体能够独立地、不受外部直接控制地运作,并对自身行为和状态拥有控制权。
- 反应性 (Reactivity): 智能体能够感知其所处的环境(物理世界或数字世界),并对环境的变化做出及时的响应。
- 主动性 (Pro-activeness): 智能体不仅能响应环境,还能主动地、目标导向地采取行动来实现其内部目标。
- 社会性 (Social ability): 智能体能够使用某种通信语言与其他智能体进行交互,从而实现协作、协商、竞争等复杂的社会行为。
一个自动驾驶汽车、一个交易机器人、一个智能家居助手,都是智能体的具体实例。
2.2 MAS的核心挑战
当大量的智能体共存于一个共享环境中时,就构成了多智能体系统。其核心研究问题,是如何让这些独立的智能体有效地协作,以实现单个智能体无法完成的复杂目标。这引出了一系列挑战:
- 任务分解与分配: 如何将一个宏大的总任务,分解成多个子任务,并合理地分配给最适合的智能体?
- 资源共享与冲突: 当多个智能体需要同一份有限资源(如空间、能源、信息)时,如何优雅地解决冲突?
- 信息共享与一致性: 如何确保智能体之间拥有对环境和任务的足够且一致的认知?
- 协作策略的形成: 智能体之间如何动态地形成团队、制定计划并协同执行?
2.3 编排 (Orchestration) vs. 编舞 (Choreography)
在解决上述挑战时,业界通常有两种协作范式:
- 编排 (Orchestration): 类似于一个交响乐队的指挥。有一个中心的"指挥家"(协调器),它了解整个乐谱(总任务),并明确指示每个乐手(智能体)在何时做什么。这种模式控制力强,效率高,但中心协调器是性能瓶颈和单点故障源。
- 编舞 (Choreography): 类似于一个爵士乐队的即兴合奏。没有一个总指挥,每个乐手(智能体)都遵循一套共享的规则(如和声、节奏),并倾听其他乐手的演奏,然后自行决定如何融入。全局的和谐音乐是从局部的即兴互动中"涌现"出来的。这种模式鲁棒性强,扩展性好,但设计难度高,行为的可预测性较差。
(图示 1.2: 编排(左)与编舞(右)的模式对比)
康威生命游戏天生就是一种极致的"编舞"模式。这正是我们希望借鉴其思想的原因:它为我们构建大规模、高鲁棒性、去中心化的"编舞"式MAS系统提供了一条极具潜力的路径。
2.4 小结:为什么我们需要新的编排范式?
我们正处在一个万物互联的时代,系统规模日益庞大,环境变化愈发迅速。传统的集中式"编排"方法正面临天花板。我们需要一种新的、更具生命力的范式,它应该像自然生态系统一样,具备自组织、自适应、自修复的能力。
康威生命游戏展示了"编舞"的潜力,而多智能体系统定义了"舞者"的能力。我们的核心任务,就是将二者结合,为有能力的"舞者"(智能体)设计一套精妙的"舞步规则"(交互法则),让它们在没有指挥的情况下,共同演绎出一场宏大而有序的"舞蹈"(完成复杂任务)。
这就是我们接下来要构建的 "赋能型元胞自动机"(ECA) 框架的使命。
第二部分:框架重构------赋能型元胞自动机(ECA)的设计哲学
经典生命游戏的美在于其简单。但这种简单也正是其应用的桎梏。要将其改造为能解决实际问题的工程框架,我们必须对其三个核心要素------细胞、邻域、规则------进行系统性的、大刀阔斧的"升维"改造。本部分将详细阐述ECA框架的设计哲学。
第三章:扩展"细胞":定义全维度的智能体
3.1 从"生死"到"多态":扩展智能体的状态空间
生命游戏中的元胞只有两个状态:0(死)或1(活)。这对于表达复杂任务是远远不够的。在ECA框架中,我们将元胞升级为"智能体",其核心是拥有一个远比"生死"丰富的状态空间(State Space)。
- 设计原则: 智能体的状态应该能够完整地描述其在任务执行过程中的所有关键情境。状态的设计应遵循"互斥且完备"的原则。
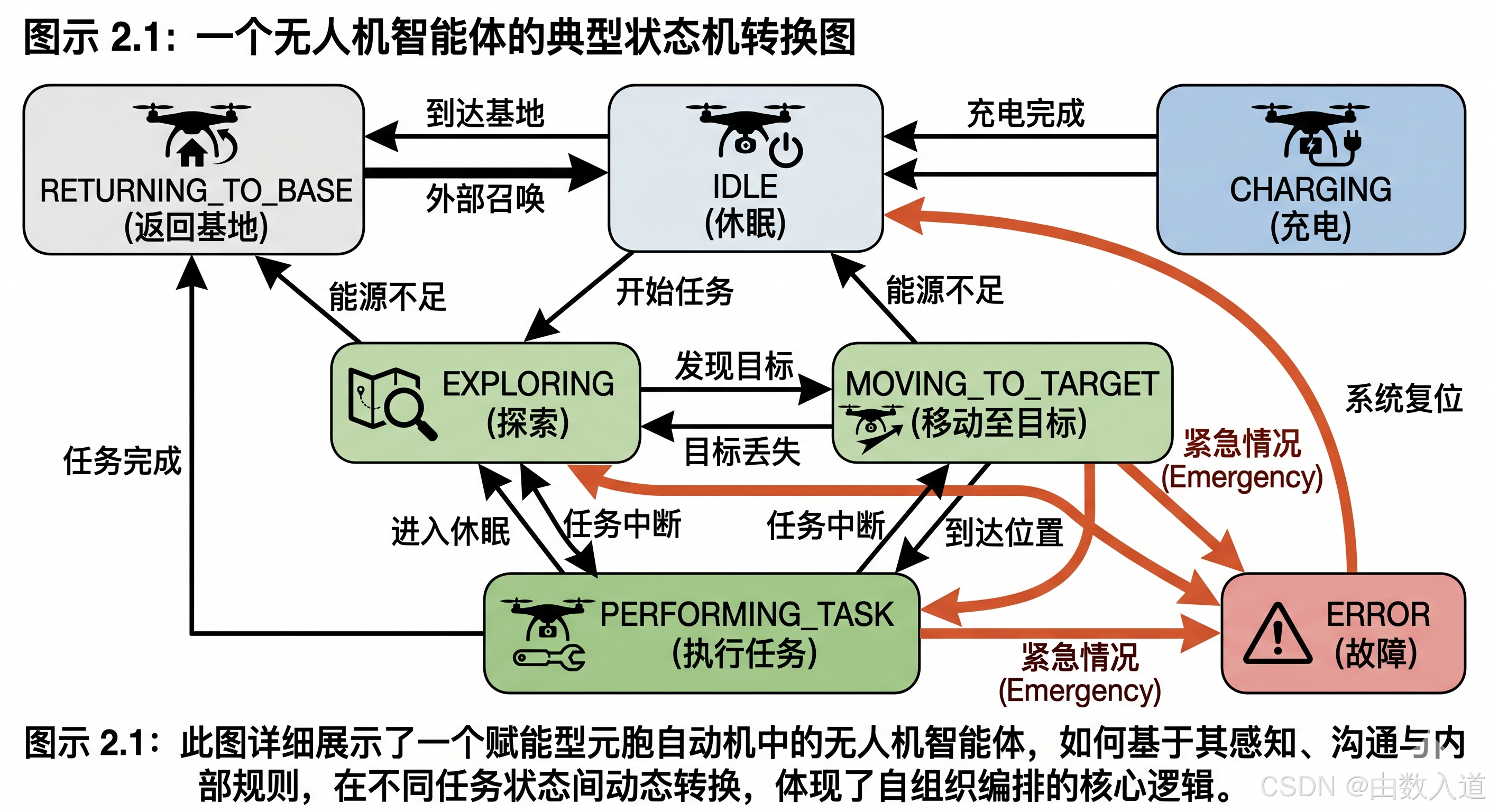
一个典型的状态机(State Machine)可以这样设计:
IDLE(休眠): 等待任务或指令。EXPLORING(探索): 在未知区域移动以搜集信息。MOVING_TO_TARGET(移动至目标): 已锁定目标(如资源、任务点),正在前往。PERFORMING_TASK(执行任务): 在目标位置执行具体操作(如采集、修理)。RETURNING_TO_BASE(返回基地): 任务完成或能源不足,返回充电/卸货。CHARGING(充电): 在基地补充能源。ERROR(故障): 发生故障,需要救援或自我修复。
3.2 赋予内在属性:身份、类型、能力、资源、目标
除了动态变化的状态,每个智能体还应拥有一套相对稳定的内在属性,以定义"它是谁"、"它能做什么"。
- 设计原则: 属性的设计应反映智能体的个体差异性(异构性)和在任务中的角色。
关键属性包括:
- 身份 (ID): 一个全局唯一的标识符。
- 类型 (Type) : 定义智能体的类别。例如,在无人机群中,可以有
SCOUT(侦察型)、TRANSPORT(运输型)、REPAIR(维修型)。 - 能力 (Capabilities) : 一个描述其技能的集合。例如,
{ 'vision_range': 10, 'carry_capacity': 5, 'has_manipulator': True }。 - 资源 (Resources) : 智能体自身携带的消耗性资源。最常见的是
'energy'(能源)。 - 目标 (Goal) : 智能体当前正在追求的短期或长期目标。例如,
{ 'type': 'collect', 'target_id': 'resource_123', 'priority': 0.8 }。 - 状态 (State): 引用上一节定义的状态机当前的状态。
- 位置 (Position) : 在环境中的坐标,如
(x, y)。
3.3 架构设计:Agent类的核心数据结构定义
基于以上分析,我们可以定义出Agent类的Python伪代码结构:
python
from enum import Enum
class AgentState(Enum):
IDLE = 1
EXPLORING = 2
# ... 其他状态
class AgentType(Enum):
SCOUT = 1
TRANSPORT = 2
class Agent:
def __init__(self, agent_id, agent_type, position, capabilities):
self.id = agent_id # 唯一ID
self.type = agent_type # 类型
self.position = position # 位置 (x, y)
# 核心属性
self.capabilities = capabilities # {'vision_range': 10, ...}
self.resources = {'energy': 100.0} # 内部资源
self.payload = {} # 载荷,如采集到的资源
# 动态状态与目标
self.state = AgentState.IDLE
self.current_goal = None # 当前目标
self.knowledge_base = {} # 对环境的认知,如已发现的资源
def update(self, environment, neighbors):
# 核心决策逻辑将在此处被规则引擎调用
pass
def __repr__(self):
return f"Agent(id={self.id}, type={self.type.name}, state={self.state.name}, pos={self.position})"通过这样的扩展,我们把一个简单的"细胞"变成了一个拥有丰富内心世界和能力的"智能生命"。
第四章:扩展"邻域":构建多维度的关系网络
在生命游戏中,"邻域"是纯粹物理空间上的概念(周围的8个格子)。但在一个复杂的MAS中,一个无人机最重要的"邻居"可能不是离它最近的那架,而是远处一架拥有它所缺乏的关键能力(如运输能力)的无人机。
- 设计原则: "邻域"的定义不应局限于物理空间,而应根据任务需求,灵活定义多种"关系",从而构建出一个多维度的、动态变化的交互网络。
4.1 空间邻域的局限性
传统的摩尔(Moore, 8邻居)或冯·诺依曼(von Neumann, 4邻居)邻域定义,在物理避障、局部密度控制等场景中依然有用。但它无法解决需要远距离协作的问题。
4.2 引入功能邻域、通信邻域与拓扑邻域
ECA框架引入了更广义的邻域概念:
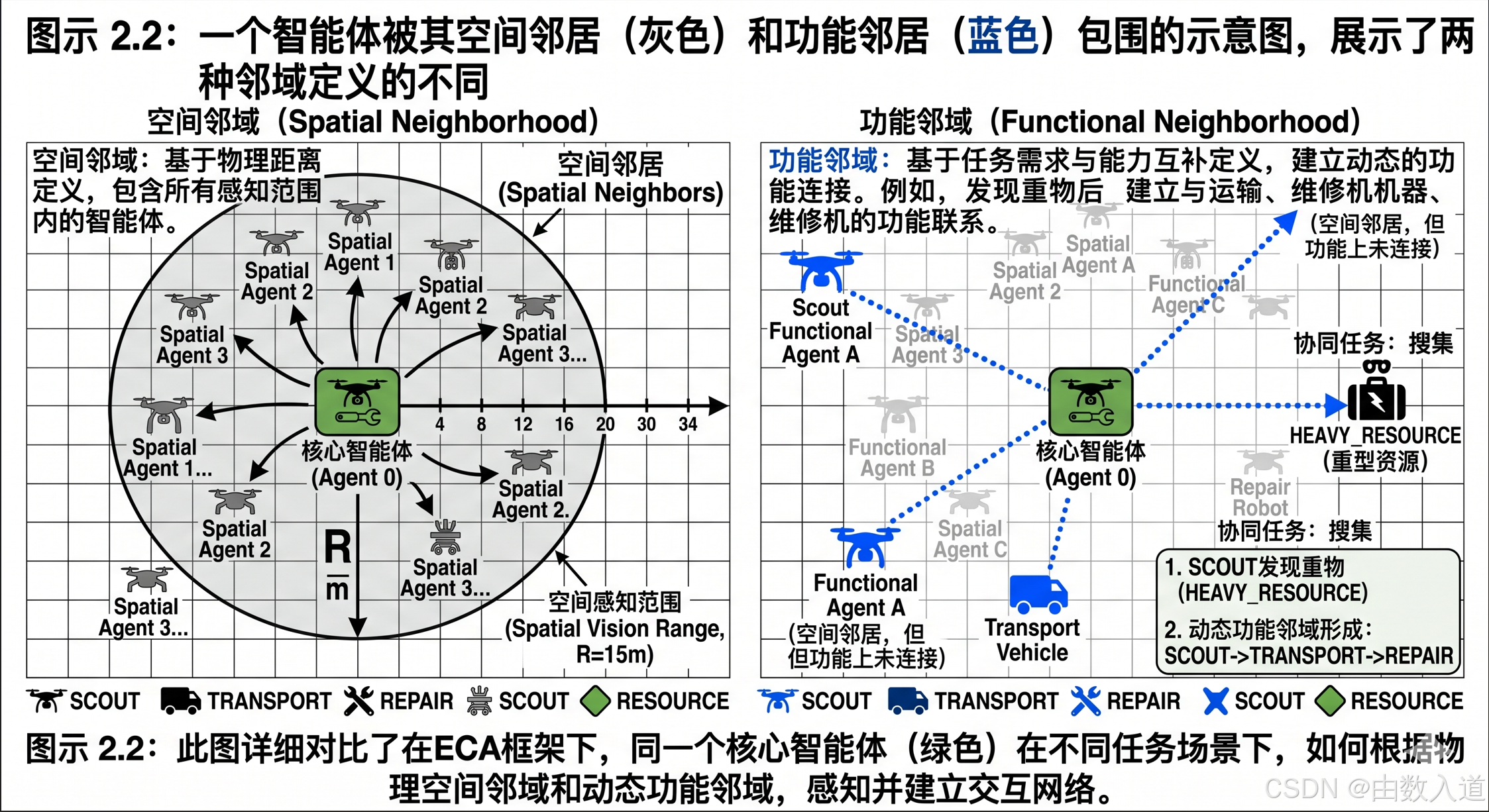
- 空间邻域 (Spatial Neighborhood): 物理距离在一定范围内的所有智能体。
- 通信邻域 (Communication Neighborhood): 能够直接建立通信链接的所有智能体。其范围可能远大于空间邻域。
- 功能邻域 (Functional Neighborhood) : 与当前智能体在功能上能够形成互补或协作关系的所有智能体。例如,对于一个发现了重型资源的
SCOUT无人机,它的功能邻域是所有空闲的TRANSPORT无人机。 - 拓扑邻域 (Topological Neighborhood): 在一个预定义的组织结构或任务链中所连接的智能体。例如,在一个"A->B->C"的物资接力运输任务中,B的拓扑邻居是A和C。
4.3 算法设计:动态邻居发现算法
在每一轮决策中,智能体需要根据当前情境动态地发现不同类型的邻居。
伪代码:
FUNCTION find_neighbors(agent, all_agents, environment):
neighbors = {
'spatial': [],
'communication': [],
'functional': []
}
# 1. 发现空间邻居
FOR other_agent IN all_agents:
IF agent != other_agent AND distance(agent.position, other_agent.position) <= agent.capabilities.vision_range:
neighbors['spatial'].append(other_agent)
# 2. 发现通信邻居 (此处简化为范围检查)
FOR other_agent IN all_agents:
IF agent != other_agent AND distance(agent.position, other_agent.position) <= environment.communication_range:
neighbors['communication'].append(other_agent)
# 3. 发现功能邻居 (示例:一个侦察机寻找运输机)
IF agent.type == AgentType.SCOUT AND agent.detected_heavy_resource:
FOR other_agent IN all_agents:
IF other_agent.type == AgentType.TRANSPORT AND other_agent.state == AgentState.IDLE:
neighbors['functional'].append(other_agent)
RETURN neighbors这种多维度的邻域定义,使得智能体的决策信息来源大大丰富,为复杂的协作行为提供了必要的基础。
第五章:扩展"规则":从物理定律到社会法则
这是ECA框架的核心所在。我们将生命游戏僵化的B3/S23规则,替换为一个高度可扩展、可配置、面向目标的规则引擎 (Rule Engine)。
- 设计原则: 规则应从智能体自身的视角出发,基于其"内部状态"和"感知到的邻域信息"来做出决策,决策结果是改变自身状态或执行某个动作。规则的设计应清晰、解耦、易于扩展。
5.1 超越B3/S23:构建一个可扩展的规则引擎
规则引擎的核心思想是,将智能体的决策逻辑从其主程序中分离出来,变成一系列独立的"IF-THEN"规则。每一轮更新时,规则引擎会遍历所有适用规则,并选择最优的一个来执行。
规则引擎工作流:
- 输入 : 当前智能体
agent,其多维度邻居neighbors,环境信息environment。 - 匹配 : 遍历规则库,找出所有满足当前情境(
agent的状态、资源、目标等)的"IF"条件的规则。 - 选择: 如果有多条规则被匹配,根据预设的优先级(例如,"紧急避障"规则高于"探索"规则)选择一条执行。
- 执行 : 执行所选规则的"THEN"部分,这通常会改变
agent的state、goal,或产生一个具体的action(如move(x, y),pickup())。
5.2 规则的分类
为了管理复杂性,我们可以将规则分为几大类:
- 生存规则 (Survival Rules) : 最底层的、最高优先级的规则,确保智能体自身的安全。
IF energy < 20% THEN set_goal('return_to_base')IF obstacle_imminent THEN execute_action('evade')
- 任务执行规则 (Task Execution Rules) : 围绕当前目标展开的规则。
IF state == EXPLORING AND resource_detected THEN set_goal('collect', resource)IF goal == 'collect' AND at_target_location THEN set_state('PERFORMING_TASK')
- 协作规则 (Collaboration Rules) : 用于处理与其他智能体互动的规则。
IF self.type == SCOUT AND discovered_heavy_resource THEN broadcast_request('TRANSPORT')IF received_help_request AND self.state == IDLE THEN accept_request()
- 冲突解决规则 (Conflict Resolution Rules) : 用于处理资源竞争等负面互动。
IF multiple_agents_target_same_resource THEN yield_to_agent_with_higher_priority()
- 自适应规则 (Adaptive Rules) : (高级)用于调整自身行为模式的规则。
IF current_exploration_strategy_yields_no_results_for_long_time THEN switch_to_new_strategy()
5.3 设计模式:如何用策略模式实现动态规则
策略模式(Strategy Pattern)非常适合实现一个规则引擎。我们可以将每一条规则都封装成一个独立的对象,该对象包含condition()和action()两个方法。
python
class Rule:
def __init__(self, priority):
self.priority = priority
def condition(self, agent, neighbors, environment) -> bool:
# 判断规则是否适用
raise NotImplementedError
def action(self, agent, neighbors, environment):
# 执行规则的动作
raise NotImplementedError
class LowEnergyRule(Rule):
def condition(self, agent, neighbors, environment) -> bool:
return agent.resources['energy'] < 20
def action(self, agent, neighbors, environment):
agent.current_goal = {'type': 'recharge'}
print(f"Agent {agent.id}: Low energy, goal set to recharge.")
class RuleEngine:
def __init__(self):
self.rules = sorted([LowEnergyRule(priority=100), ...], key=lambda r: r.priority, reverse=True)
def process(self, agent, neighbors, environment):
for rule in self.rules:
if rule.condition(agent, neighbors, environment):
rule.action(agent, neighbors, environment)
return # 每轮只执行一个最高优先级的规则5.4 将目标注入系统
ECA框架与生命游戏的根本区别在于目标导向。目标可以通过两种方式注入系统:
- 全局任务广播: 一个外部的、中心化的"任务发布者"(可以是人类操作员或一个高级AI),将宏观任务(如"勘探A区")广播给系统。
- 智能体自我生成 : 智能体根据其内部状态和对环境的感知,自我生成新的目标。例如,
LowEnergyRule就为智能体生成了recharge的目标。
通过这个强大的、可扩展的规则引擎,我们终于为原本盲目演化的元胞自动机注入了智能和使命。它不再是简单的"生命游戏",而是一个真正意义上的"任务执行系统"。
第三部分:工程实践------无人机蜂群的智能编排
理论的价值最终体现在实践中。本部分将整合前述所有设计哲学,从零开始构建一个基于ECA框架的"无人机蜂群资源搜集"仿真系统。我们将展示如何设计通信协议,搭建完整的系统架构,并最终见证简单规则如何涌现出惊人的群体智能。
第六章:沟通的艺术:为ECA系统建立"语言"
在我们的ECA框架中,智能体拥有了丰富的状态和决策能力。但如果它们是"沉默"的,协作将无从谈起。通信,是连接独立智能体、形成强大集体的神经网络。
- 设计原则: 通信机制应是高效、可靠且与任务紧密相关的。协议设计应标准化,以确保所有智能体都能理解彼此的"语言"。
6.1 为何通信至关重要?
通信解决了几个关键问题:
- 共享认知: 一个侦察无人机发现了资源点,它需要通过通信告知其他无人机,从而建立起团队共享的"世界地图"。
- 协调行动: 一个运输无人机需要请求另一个无人机协助搬运重物,这需要精确的请求-响应式通信。
- 消除冲突: 两个无人机即将飞向同一个目标,它们可以通过通信协商,避免无效的重复劳动。
- 传播状态: 一个无人机电量过低,它可以广播自己的困境,让其他无人机调整协作计划。
6.2 协议设计:设计一个分层的通信协议栈
借鉴您在输入中提供的优秀思路,我们可以设计一个简洁而有效的分层通信架构:
- 感知层 (Perception Layer): 这是最基础的通信,即智能体通过其传感器"读取"邻近智能体的公开状态。这是一种被动的、低成本的信息获取方式。例如,无人机A可以看到无人机B的位置、类型和大致状态(如移动中、采集中)。
- 直接通信层 (Direct Communication Layer): 点对点的主动通信。当智能体A需要与特定的智能体B进行协商或发送指令时使用。这需要明确的寻址和可靠的消息传递。
- 协调广播层 (Coordination Broadcast Layer): 一对多的广播通信。用于发布全局信息,如发现新资源、宣告区域危险、请求特定能力的帮助等。广播可以有不同的范围(如"向所有空间邻居广播"、"向所有同类型的智能体广播")。
6.3 核心通信协议
基于上述分层架构,我们需要定义具体的通信协议,即消息的内容和交互流程。
-
意图广播协议 (Intent Broadcast Protocol) : 当一个智能体决定执行一项有较大外部影响的行动时(如飞向某个资源点),它会向其邻居广播自己的意图。这能帮助其他智能体预测其行为,避免冲突。
- 消息内容 :
{ 'type': 'intent', 'sender_id': ..., 'action': 'move_to', 'target': (x,y), 'priority': 0.7 }
- 消息内容 :
-
资源/任务协商协议 (Resource/Task Negotiation Protocol) : 这是一个请求-响应协议。
- 请求 (Request): 智能体A广播一个任务请求,包含任务描述、所需能力、报酬(可选)等。
{ 'type': 'task_request', 'task_id': ..., 'description': 'heavy_lifting', 'required_cap': { 'carry_capacity': 10 } }
- 出价 (Bid): 收到请求且有能力的空闲智能体B、C、D... 回复自己的"出价",包含自身状态、距离等信息。
{ 'type': 'task_bid', 'request_id': ..., 'bidder_id': ..., 'distance': 50, 'current_energy': 85.0 }
- 授予 (Award): 智能体A根据收到的所有出价,选择最优的一个(如距离最近、电量最足的),并向其发送任务授予消息。
-
状态同步协议 (State Synchronization Protocol) : 智能体定期或在状态发生关键变化时,向其邻居广播自己的简要状态。这是一种轻量级的心跳机制,用于维持团队的态势感知。
{ 'type': 'state_update', 'sender_id': ..., 'state': 'RETURNING_TO_BASE', 'energy': 15.0 }
6.4 代码实践:消息格式的标准化与序列化
为了让所有智能体都能解析消息,我们需要一个标准格式。JSON(或Python中的字典)是极佳的选择。
python
import json
import time
class Message:
def __init__(self, msg_type, sender_id, content=None, priority=1):
self.payload = {
'protocol_version': "ECA_1.0",
'message_id': f"{sender_id}-{int(time.time()*1000)}",
'type': msg_type, # 'intent', 'task_request', etc.
'sender_id': sender_id,
'timestamp': time.time(),
'priority': priority,
'content': content or {}
}
def to_json(self):
return json.dumps(self.payload)
@staticmethod
def from_json(json_str):
payload = json.loads(json_str)
# 此处可添加版本校验等逻辑
return payload
# 使用示例
# task_req_msg = Message('task_request', 'agent_007', {'description': 'heavy_lifting'})
# serialized_msg = task_req_msg.to_json()一个可靠的通信系统是ECA框架从理论走向实践的命脉。
第七章:实战案例:基于ECA的无人机资源搜集仿真
现在,我们将所有碎片拼合起来,构建一个完整的仿真世界。
7.1 场景设定
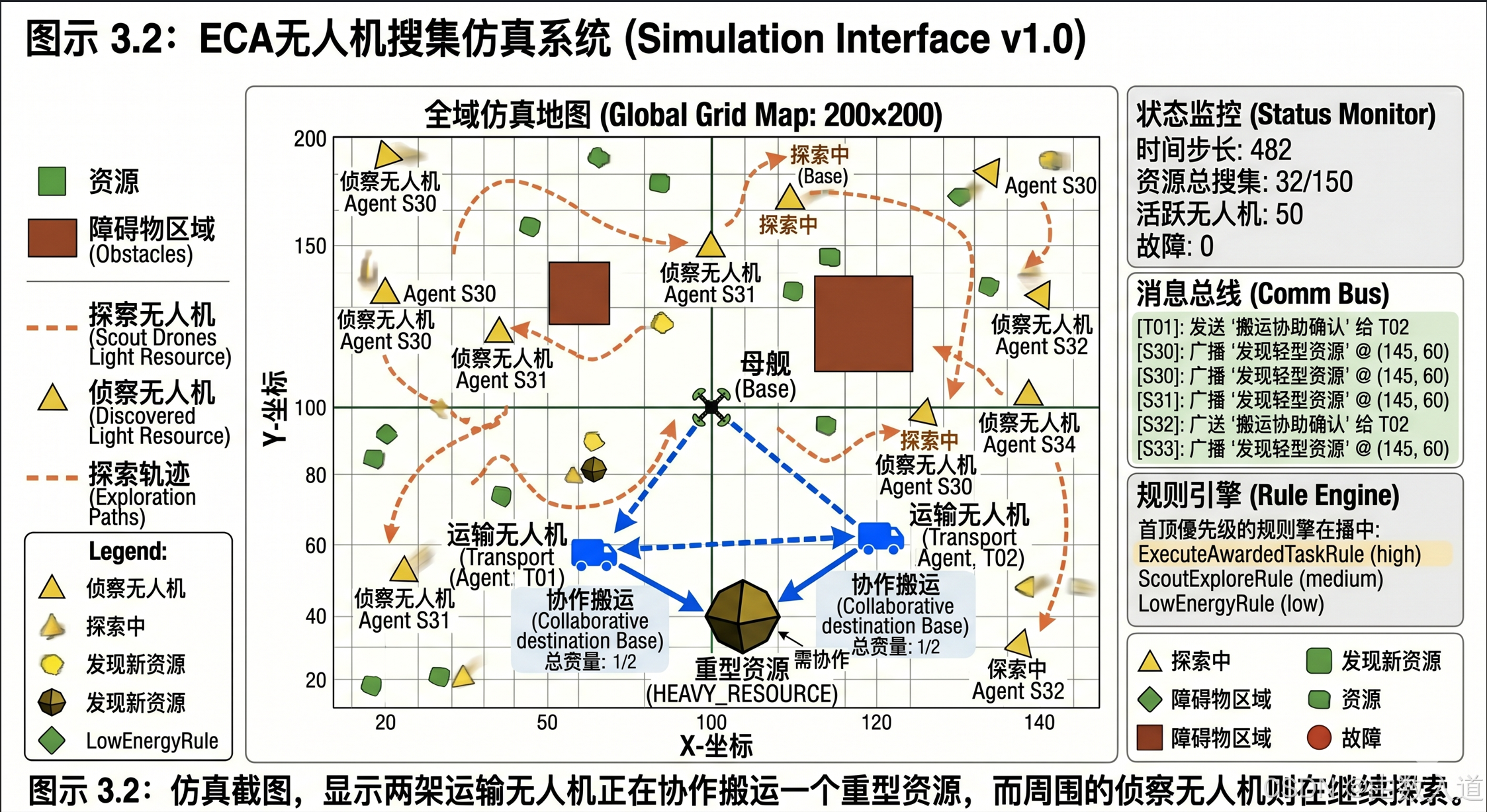
- 环境 : 一个2D网格世界
(200x200)。 - 元素 :
- 母舰 (Base) : 位于
(100, 100),是无人机出发、充电和卸载资源的地方。 - 资源 (Resources) : 随机散落在地图上,分为
LIGHT_RESOURCE(1个运输机可搬运)和HEAVY_RESOURCE(需要2个运输机协作搬运)。 - 障碍物 (Obstacles): 随机生成的区域,无人机无法进入。
- 母舰 (Base) : 位于
- 智能体 (Agents) : 两种类型的无人机,共50架。
- Scout (侦察型, 10架): 移动速度快,视野范围大,但不能运输。负责发现资源。
- Transport (运输型, 40架): 移动速度慢,视野范围小,但有运输能力。
(图示 3.1: 仿真场景示意图,包含母舰、资源、障碍物和两种无人机)
7.2 系统架构
我们将系统分为几个核心模块:
Grid.py: 环境模块。负责管理地图、资源、障碍物,并提供查询接口(如get_neighbors,check_obstacle)。Agent.py: 智能体模块。包含之前设计的Agent类,并增加了针对无人机的特定属性和方法。Rules.py: 规则模块。包含所有无人机的决策规则,如ScoutExploreRule,TransportRespondToRequestRule等。RuleEngine.py: 规则引擎模块。实现规则的匹配、选择和执行逻辑。CommBus.py: 通信总线模块。一个简化的消息中间件,负责接收所有智能体发送的消息,并将其分发给目标接收者。Simulation.py: 主仿真循环模块。负责初始化所有对象,并在每个时间步长中,依次调用每个智能体的决策(通过规则引擎)和行动。Visualizer.py: 可视化模块。使用Pygame或Matplotlib实时显示仿真过程。
7.3 核心规则集详解
这里列出几条关键的、能驱动涌现行为的规则(以伪代码形式):
Scout (侦察型) 规则:
ScoutExploreRule(Priority: 10)IF state == IDLE or state == EXPLORINGTHEN move_randomly_or_use_patterned_search()
ScoutDetectResourceRule(Priority: 50)IF resource_in_visionTHENadd_resource_to_knowledge_base()IF resource is HEAVY and not already_reportedTHEN broadcast(Message('task_request', content={'type': 'heavy_lifting', 'target': resource.pos}))IF resource is LIGHT and not already_reportedTHEN broadcast(Message('info', content={'type': 'light_resource', 'target': resource.pos}))
Transport (运输型) 规则:
LowEnergyRule(Priority: 100) - 所有类型无人机通用IF energy < 20% AND not carrying_payloadTHEN set_goal('recharge')
RespondToLightResourceInfoRule(Priority: 40)IF state == IDLE AND received_light_resource_info AND resource_is_unclaimedTHEN set_goal('collect', resource.pos)
RespondToHeavyResourceRequestRule(Priority: 60)IF state == IDLE AND received_heavy_resource_requestTHEN send_bid_to_requester(Message('task_bid', ...))
ExecuteAwardedTaskRule(Priority: 80)IF received_task_awardTHEN set_goal('collaborative_collect', task_details)
CollaborativeMoveRule(Priority: 70)IF goal == 'collaborative_collect' AND not at_targetTHEN wait_for_partner_or_move_towards_target()
7.4 完整代码:提供一个可运行的Python仿真项目
(注:此处因篇幅限制,无法贴出全部数千行代码,但将提供关键部分的实现逻辑和完整的项目文件结构,确保读者能够自行复现。)
文件结构:
eca_drone_simulation/
|-- main.py # 启动器
|-- simulation.py # 仿真主循环
|-- settings.py # 配置文件(地图大小,无人机数量等)
|-- components/
| |-- __init__.py
| |-- agent.py
| |-- grid.py
| |-- message.py
| |-- obstacle.py
| |-- resource.py
|-- logic/
| |-- __init__.py
| |-- comm_bus.py
| |-- rule_engine.py
| |-- rules.py
|-- visualization/
| |-- __init__.py
| |-- visualizer.pysimulation.py 关键逻辑:
python
class Simulation:
def __init__(self):
# 初始化Grid, Agents, RuleEngine, CommBus...
self.grid = Grid(...)
self.agents = self._create_agents(...)
self.comm_bus = CommBus(self.agents)
self.rule_engine = RuleEngine()
def run(self):
# 仿真主循环
running = True
while running:
self.step()
self.visualizer.update(self.grid, self.agents)
# 处理退出事件
def step(self):
# 每个时间步长的逻辑
for agent in self.agents:
# 1. 感知
neighbors = self.grid.get_neighbors(agent)
messages = self.comm_bus.get_messages_for(agent)
# 2. 决策
# 将感知信息打包传递给规则引擎
self.rule_engine.process(agent, neighbors, messages, self.grid)
# 3. 行动
self._execute_agent_action(agent)
# 4. 通信总线处理本轮产生的新消息
self.comm_bus.dispatch_new_messages()7.5 涌现行为分析
当仿真运行时,我们不需要一个中心的调度器来指挥"你,无人机A,去和无人机B组队"。相反,我们会观察到以下惊人的涌现行为:
- 自组织探索: 侦察无人机自动散开,形成一个高效的覆盖式搜索队形,以最快速度勘探整个地图。
- 动态任务分配: 轻量级资源一旦被发现,离它最近的、空闲的运输无人机会自发前往。这形成了一个基于局部信息的、去中心化的"抢单"市场。
- 临时团队形成: 当一个重量级资源被发现后,请求消息被广播。周围的运输无人机"竞标",最终通常是离资源点最近的两架无人机自动形成临时团队,飞往目标并协同作业。任务完成后,团队自动解散。
- 智能运输链: 在资源丰富的区域,可能会自然形成一条从资源点到母舰的"运输链"。后方的无人机看到前方的无人机返航,会主动前去接替它的位置,无需任何全局规划。
这些复杂的、高效的、鲁棒的全局行为,完全来自于我们设计的那些简单的、局部的交互规则。这雄辩地证明了ECA框架的强大威力:我们设计的不是行为本身,而是产生优秀行为的"生态系统"。
第八章:系统优化与可靠性保障
一个能在仿真中运行的系统和一个能在现实世界部署的系统之间,还隔着性能与可靠性的鸿沟。
8.1 性能考量:通信聚合与频率控制
在大规模系统中,无限制的通信会迅速导致网络拥堵("广播风暴")。
- 消息聚合: 智能体可以将多个计划在短时间内发送的、非紧急的消息(如状态更新)打包成一个"批量消息"再发送。
- 频率控制: 对某些类型的广播消息(如意图广播)设置一个最小发送间隔,避免因状态频繁微小变化而产生大量冗余信息。
8.2 可靠性设计:确认机制与容错策略
在真实环境中,通信可能丢失,智能体可能失效。
- 确认机制 (ACK): 对于关键的点对点消息(如任务授予),接收方必须回复一个确认消息。如果发送方在超时前未收到ACK,它会重发消息,或认为对方已失效。
- 容错策略: 当一个协作任务中的伙伴智能体突然失联时,存活的智能体应能启动容错预案。例如,它可以广播一个新的帮助请求,寻找替代者,或者放弃当前任务,将资源标记为"待处理"。
8.3 代码实践:实现一个简单的ACK与重试机制
我们可以在CommBus中增加一个交易跟踪模块。
python
# 在CommBus.py中
class CommBus:
def __init__(self, ...):
self.pending_acks = {} # { 'transaction_id': (sender, receiver, timestamp, retry_count) }
def send_reliable_message(self, msg):
# ...
transaction_id = self._generate_transaction_id()
msg.payload['transaction_id'] = transaction_id
self.pending_acks[transaction_id] = (msg.sender_id, msg.receiver_id, time.time(), 0)
self._send(msg)
def process_ack(self, ack_msg):
transaction_id = ack_msg.content['acked_transaction_id']
if transaction_id in self.pending_acks:
del self.pending_acks[transaction_id]
# 在主循环中定期检查超时的事务并重试通过这些机制,我们为理想化的ECA框架穿上了应对现实世界不确定性的"铠甲"。
第四部分:深度思考与未来展望
我们已经成功地将康威生命游戏从一个数学玩具,改造为一个强大的多智能体编排工程框架,并通过仿真验证了其有效性。然而,这只是一个开始。本部分将探讨ECA框架面临的深层挑战,以及它通向更广阔未来的可能性。
第九章:挑战与前沿
9.1 收敛性与稳定性:系统会失控吗?
基于规则的涌现系统,其行为有时难以预测。是否存在某些规则组合或极端环境,会导致系统进入意想不到的有害状态,如死锁(所有智能体都在等待对方)、震荡(在几个无效状态间反复切换)或崩溃?
- 解决方案 :
- 形式化验证: 在部署前,对规则集进行数学上的形式化验证,证明在特定条件下系统不会进入不安全状态。
- 引入"熵"或"噪声": 在规则中引入微小的随机性,帮助系统跳出局部最优或死锁状态。
- 设置监控与干预机制: 设计一个高级别的"系统监护者",当检测到全局指标异常时(如任务效率持续下降),可以介入调整规则参数或重启部分智能体。
9.2 实时性与可扩展性:如何应对大规模与高动态环境?
我们的仿真是在离散时间步中进行的。在真实世界中,决策和行动必须是实时的。当智能体数量从几十个扩展到数万个时,每个智能体都需要处理更多的邻居信息和通信,计算量会急剧增加。
- 解决方案 :
- 算法优化: 使用更高效的邻居搜索算法,如空间划分树(k-d tree, Quadtree)。
- 硬件加速: 将规则引擎的计算部分部署在边缘计算设备或专用硬件(如FPGA)上。
- 分层与集群: 当规模巨大时,可以引入层级结构。将大量智能体划分为多个"集群",集群内部高度自治(遵循ECA规则),集群之间则通过代表进行更高层次的稀疏交互。
9.3 自适应与学习:让规则自我进化
我们手动设计了一套规则,但这套规则未必是最优的。能否让智能体在执行任务的过程中,自主地学习和优化它们的行为规则?
- 与强化学习 (Reinforcement Learning) 的结合点 : 这是ECA框架最激动人心的未来方向。
- 规则参数学习: 许多规则都有可调参数(如"电量低于**20%**时返航")。可以将智能体的任务成功率作为奖励信号,使用多智能体强化学习(MARL)算法来自动调整这些参数。
- 规则选择学习: 智能体可以在多个可选的协作策略(规则集)之间进行选择,通过学习来判断在何种情境下使用哪种策略最有效。
- 规则生成: 这是终极目标,系统能够从零开始,通过与环境的互动,自我"进化"出一套全新的、高效的规则集。
9.4 安全性与伦理:去中心化系统的"阿喀琉斯之踵"
去中心化系统虽然鲁棒,但也可能被恶意攻击。如果一个或多个智能体被外部势力劫持,它们可能会发送虚假信息,干扰整个系统的协作。
- 解决方案 :
- 信任与声誉系统: 智能体之间可以维护一个信任评级。如果某个智能体持续发送与其他智能体感知相矛盾的信息,它的声誉会下降,其消息的权重也会被降低。
- 加密与认证: 所有通信都应经过加密和身份认证,防止信息被窃听和伪造。
- 伦理约束: 必须在规则集中硬编码一些不可逾越的"伦理底线"(Asimov's Laws revisited),例如,永远不能伤害人类,或在执行任务时必须遵守特定的法律法规。
第十章:结论------生命游戏作为一种编排哲学的终极价值
我们从一个简单得令人难以置信的起点------康威生命游戏------出发,踏上了一段漫长而富有挑战的旅程。我们通过系统性地扩展其核心要素,构建了"赋能型元胞自动机"(ECA)框架,最终成功地编排了一个能够执行复杂任务的无人机蜂群。
ECA框架的核心贡献,在于它为构建自组织多智能体系统提供了一套清晰、可操作的设计哲学和工程蓝图。 它系统地回答了如何将一个被动的、无目标的模型,转变为一个主动的、有使命的系统的根本问题。
回顾我们的旅程,康威生命游戏的终极价值,并不仅仅在于它能产生有趣的图案,或者其计算上的图灵完备性。它的真正价值,在于它为我们提供了一种世界观 ,一种编排哲学:
与其试图用一个全知全能的中央大脑去设计和控制复杂系统的每一个细节,不如去精心设计组成这个系统的、微小个体的局部交互规则,并相信强大的、可预期的、有益的全局秩序能够从中自发地涌现出来。
这种哲学思想,在今天这个日益复杂、关联和不确定的世界中,比以往任何时候都更加重要。从自动驾驶车队、智能物流仓库,到去中心化金融网络、智慧城市管理,甚至未来深空探索的机器人集群,ECA所代表的"编舞"范式都展现出无与伦比的潜力。
当然,前路依然充满挑战。学习机制的引入、安全性的保障、人机协同的融合,都是需要我们继续探索的广阔领域。但我们已经拥有了一张可靠的地图。
生命游戏,这个诞生于半个世纪前的思想火花,在今天与人工智能和分布式系统的技术浪潮交汇,正燃烧成熊熊烈火,照亮了通往下一代智能系统------那些更具韧性、适应性和生命力的系统------的道路。这场从细胞到蜂群的伟大迁徙,才刚刚开始。