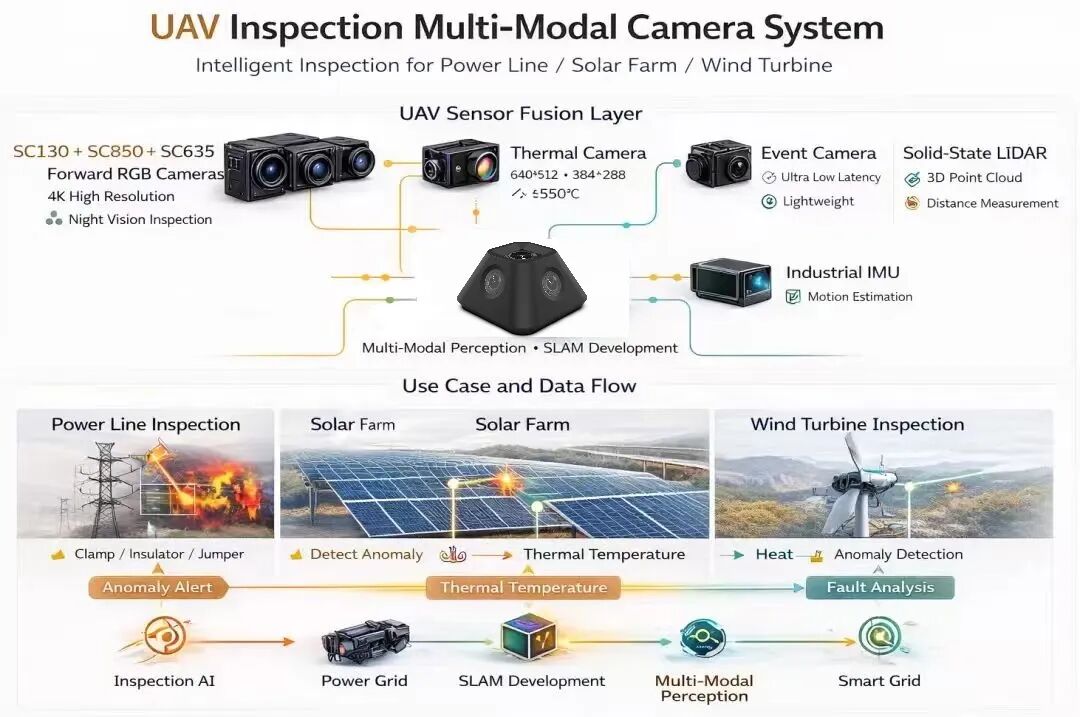
无人机视觉传感器布局标准图(UAV Vision Sensor Layout Architecture)
AiBrainBox-V 的工程产品定义提供标准传感器布局模型,方便科研院所和行业客户根据应用快速组合。
Spatial AI Edge Computer
Spatial AI Sensor Hub

三层结构:
Sensor Placement
Perception Function
Application Scenario
即:
传感器位置 → 感知能力 → 行业应用
- 前视传感器(Forward Perception)
Front RGB Camera
Front Thermal Camera
Front DVS Camera
作用:
SLAM
目标检测
远距离识别
适合:
巡检
导航
避障
- 下视传感器(Downward Perception)
用于 定位和降落。
配置:
Down RGB Camera
Down Depth / LiDAR
作用:
VIO
地面特征跟踪
精准降落
适合:
自动降落
室内导航
地下空间飞行
侧视传感器(Side Perception)
用于 巡检和侧向避障。
推荐:
Side Camera
作用:
侧向避障
近距离巡检
结构检测
适合:
电力线巡检
桥梁巡检
风机巡检
顶视传感器(Upward Perception)
顶视在很多无人机系统中开始出现。
Upward Camera
Upward LiDAR
作用:
上方障碍检测
室内导航
森林飞行
适合:
森林巡检
隧道飞行
地下空间
- 特殊传感器布局
除了 RGB 相机,AiBrainBox-V 可以扩展 三类特殊传感器。
热红外相机
建议位置:
Front
Down
用途:
夜间巡检
热异常检测
应用:
光伏巡检
电力巡检
搜救
LiDAR
推荐位置:
Front
Down
Top
作用:
3D避障
距离测量
适合:
地下空间
室内飞行
复杂地形
标准传感器组合
1 Precision Landing 套件
用于 降落平台。
Down SC850
Down LiDAR
IMU
能力:
视觉降落
高精度定位
对应产品:
AiBrainBox-V1
2 Navigation 套件
用于 GNSS拒止导航。
Front SC850
Down SC130
IMU
能力:
VIO
视觉导航
对应:
AiBrainBox-V2
3 Inspection 套件
用于 巡检机器人。
Front SC850
Down SC130
Side SC635
IMU
能力:
多目感知
巡检
目标检测
对应:
AiBrainBox-V3
4 Night / Complex Environment 套件
用于 复杂环境巡检。
Front RGB
Front Thermal
Down RGB
IMU
能力:
夜间感知
多模态检测
对应:
AiBrainBox-V4
应用场景
电力
输电线路巡检
变电站巡检
能源
风电巡检
光伏巡检
交通
铁路巡检
高速公路巡检
桥梁巡检
城市
机场跑道巡检
城市基础设施巡检
地下空间
管廊巡检
隧道巡检
矿山巡检