没问题,我给你做一个像上面 WebSocket 那样的、针对嵌入式新手能理解的 CAN / CAN FD / EtherCAT 协议 系统介绍。我们先从概念、特点、帧结构、应用案例和注意事项来讲解,然后我可以帮你画成类似的图示。
1️⃣ CAN(Controller Area Network)
什么是 CAN?
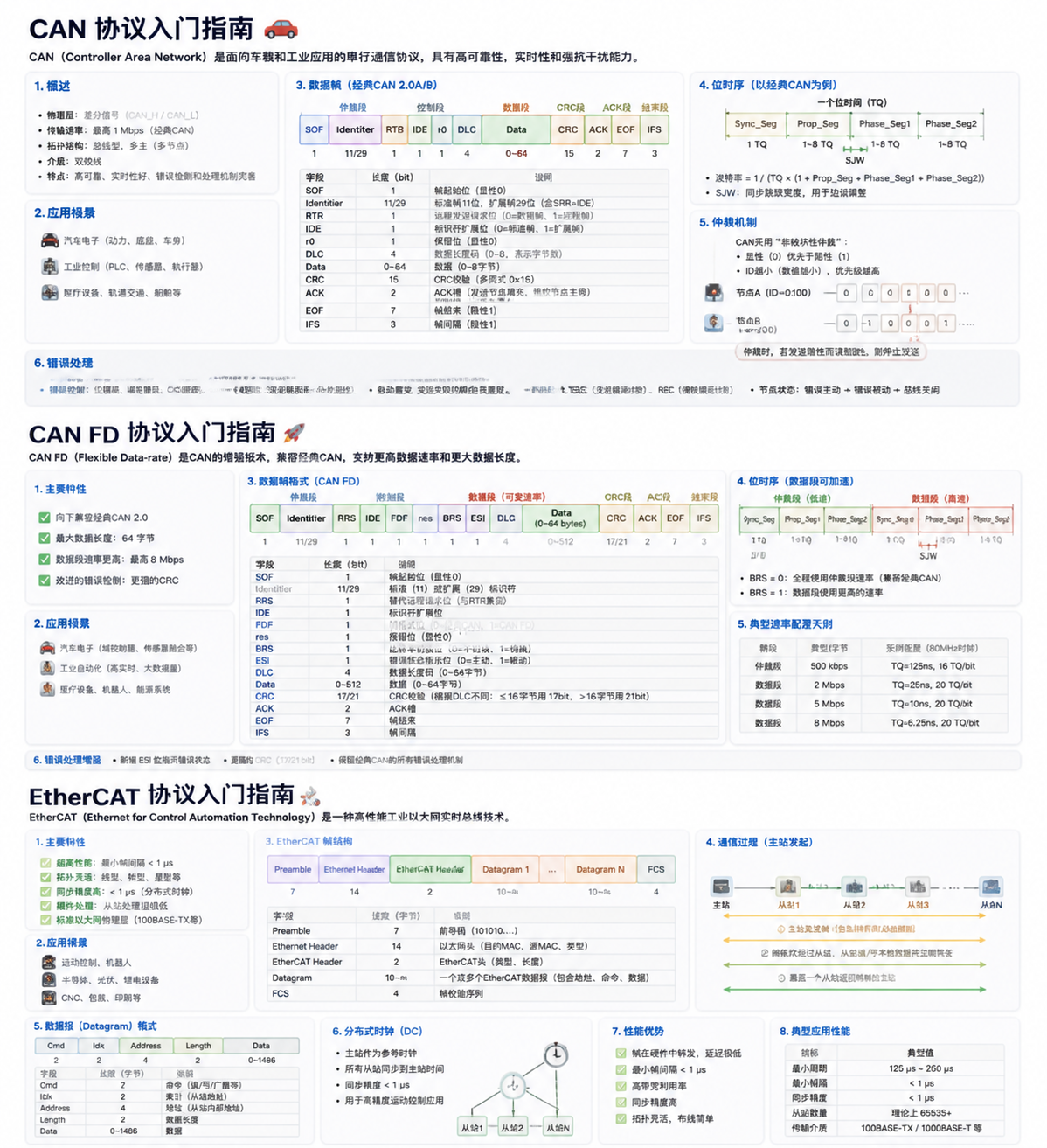
- CAN 是一种 工业和汽车领域常用的多主机串行通信总线协议。
- 它在 1980s 由 Bosch 发明,专门用于汽车 ECU(电子控制单元)之间的实时通信。
- 以 消息为中心(Message-oriented),每个消息有一个唯一的 ID,而不是基于地址。
CAN 的工作特点
- 多主机 :总线上所有节点都可以发送数据,冲突通过 仲裁机制解决。
- 实时性高:典型波特率从 125 kbps 到 1 Mbps。
- 可靠性强:自带 CRC 校验、ACK 应答、错误检测和错误恢复机制。
- 短帧:每帧数据最多 8 字节。
CAN 帧结构(标准帧 11-bit ID)
| 字段 | 长度 | 说明 |
|---|---|---|
| SOF | 1 bit | 帧起始标志 |
| ID | 11 bit | 标识符(优先级) |
| RTR | 1 bit | 远程帧请求(0 = 数据帧) |
| IDE | 1 bit | 帧类型标志(0 = 标准帧) |
| r0 | 1 bit | 保留位 |
| DLC | 4 bit | 数据长度(0~8 字节) |
| Data | 0~8 字节 | 数据 |
| CRC | 15 bit | CRC 校验 |
| CRC Delimiter | 1 bit | CRC 分隔符 |
| ACK | 2 bit | 应答字段 |
| EOF | 7 bit | 帧结束 |
示例:标准数据帧 8 字节数据,ID=0x123
应用场景
- 汽车 ECU 之间通信
- 工业设备监控
- 医疗仪器
2️⃣ CAN FD(Flexible Data Rate)
什么是 CAN FD?
-
CAN FD 是 CAN 的升级版,由 Bosch 在 2012 年提出。
-
主要改进:
- 更长的数据帧:最大 64 字节(比原 CAN 的 8 字节大得多)
- 灵活速率:数据段可以用更高波特率,提高传输效率
CAN FD 帧结构
与 CAN 类似,但有改动:
| 字段 | 长度 | 说明 |
|---|---|---|
| SOF | 1 bit | 帧起始 |
| ID | 11/29 bit | 标识符 |
| RTR | 1 bit | 远程请求帧 |
| IDE | 1 bit | 0 = 标准,1 = 扩展 |
| FDF | 1 bit | 表示 CAN FD 帧 |
| BRS | 1 bit | 数据段波特率切换 |
| ESI | 1 bit | 错误状态指示 |
| DLC | 4 bit | 数据长度(0~64 字节) |
| Data | 0~64 字节 | 数据 |
| CRC | 17 bit | CRC 校验 |
| ACK | 2 bit | 应答 |
| EOF | 7 bit | 帧结束 |
CAN FD 优势
- 更高吞吐量
- 更长数据帧
- 与旧 CAN 向下兼容
3️⃣ EtherCAT(Ethernet for Control Automation Technology)
什么是 EtherCAT?
-
EtherCAT 是 基于以太网的工业实时通信协议
-
由 Beckhoff 公司提出,用于工业自动化、运动控制等场景
-
特点:
- 总线式通信但通过以太网物理介质
- 支持微秒级低延迟
- 节点处理数据的方式称为 on-the-fly(数据在帧通过时就处理)
EtherCAT 帧结构
EtherCAT 在以太网帧的基础上进行封装:
| 字段 | 长度 | 说明 |
|---|---|---|
| Ethernet Header | 14 bytes | 标准以太网头(源/目的 MAC) |
| EtherCAT Header | 2 bytes | 命令类型(Read/Write/Forward) |
| Length | 2 bytes | 数据长度 |
| Address | 2 bytes | 寄存器/数据地址 |
| Data | 0~N bytes | 数据(可变长度) |
| Working Counter | 2 bytes | 用于检测帧是否被节点处理 |
| Ethernet CRC | 4 bytes | 校验 |
EtherCAT 特点
- 实时性极高:微秒级循环周期
- 高带宽:可通过链式拓扑高速传输大量数据
- 分布式处理:每个节点在帧流过时即处理数据,不需中央处理
- 应用:运动控制、机器人控制、PLC 自动化
4️⃣ 总结对比
| 协议 | 最大数据 | 波特率 | 适用场景 | 特点 |
|---|---|---|---|---|
| CAN | 8B | ≤1 Mbps | 汽车、工业 | 实时可靠,短帧,多主机 |
| CAN FD | 64B | 数据段可高于 1 Mbps | 汽车、工业 | 更长帧、更高速,向下兼容 |
| EtherCAT | N bytes | 100 Mbps | 工业自动化、运动控制 | 微秒级实时,链式拓扑,分布式处理 |
💡 小贴士
- CAN / CAN FD 适合嵌入式微控制器间的短消息实时通信
- EtherCAT 适合高性能工业控制,需要精确同步和低延迟
如果你需要,我可以帮你 画一张类似 WebSocket 的图示 ,展示 CAN / CAN FD / EtherCAT 协议概念、帧结构、应用场景,让你一眼就能看懂协议差异和帧布局。
你希望我画吗?