技术栈
机器人运动学①
FeiHu 114514
2026-05-05 10:20
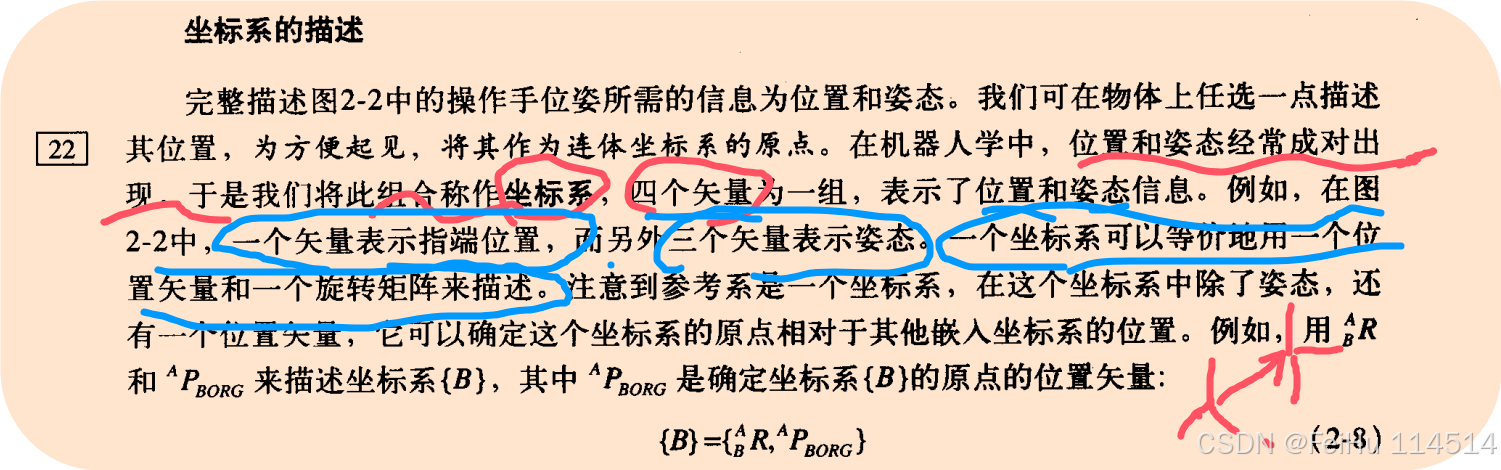
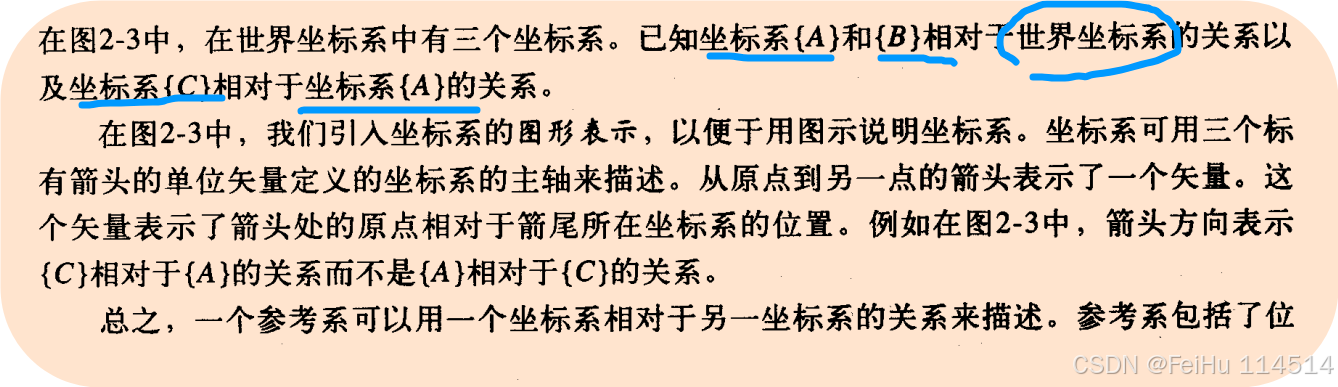
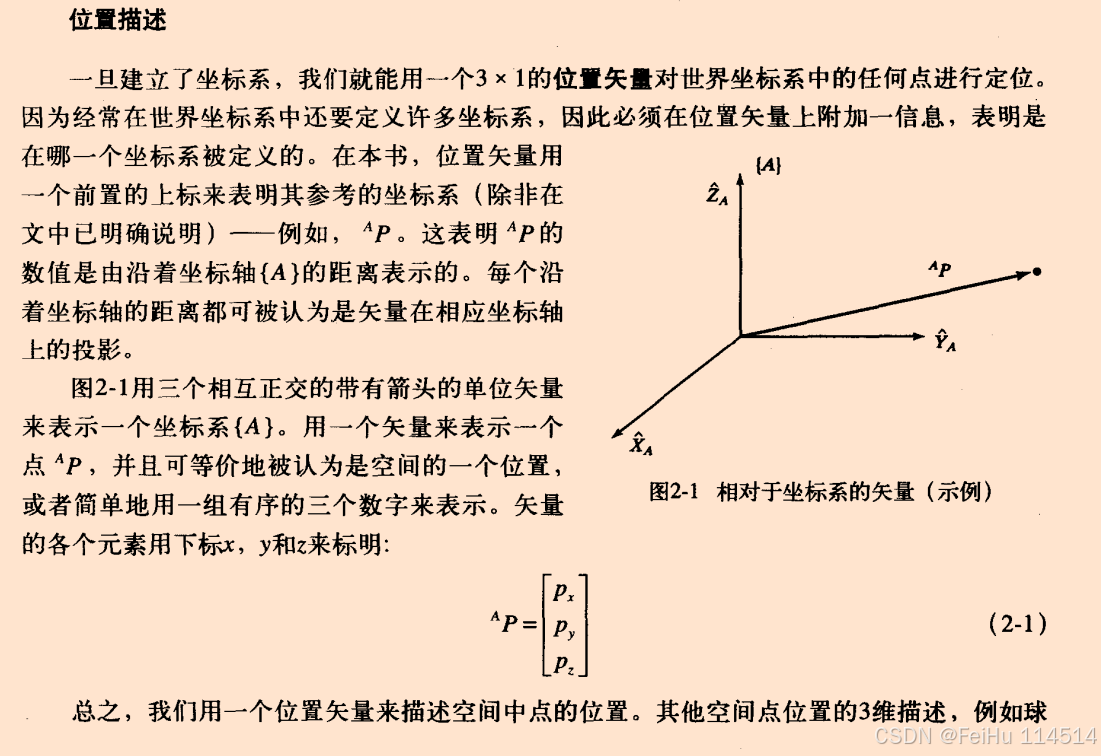
1.位置描述
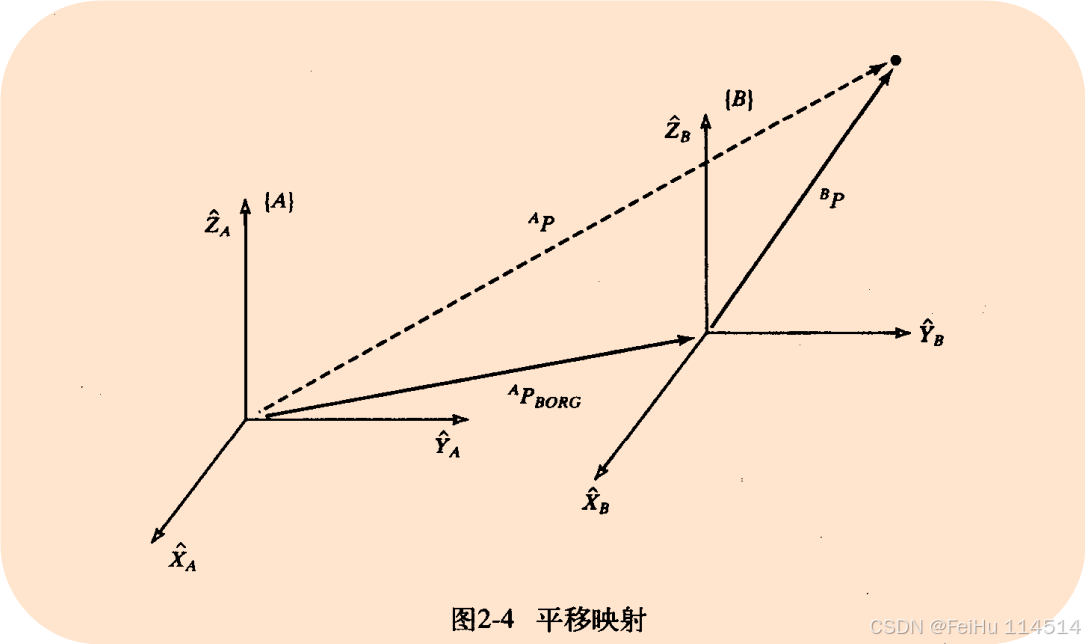
即用
来描述
AP这个向量
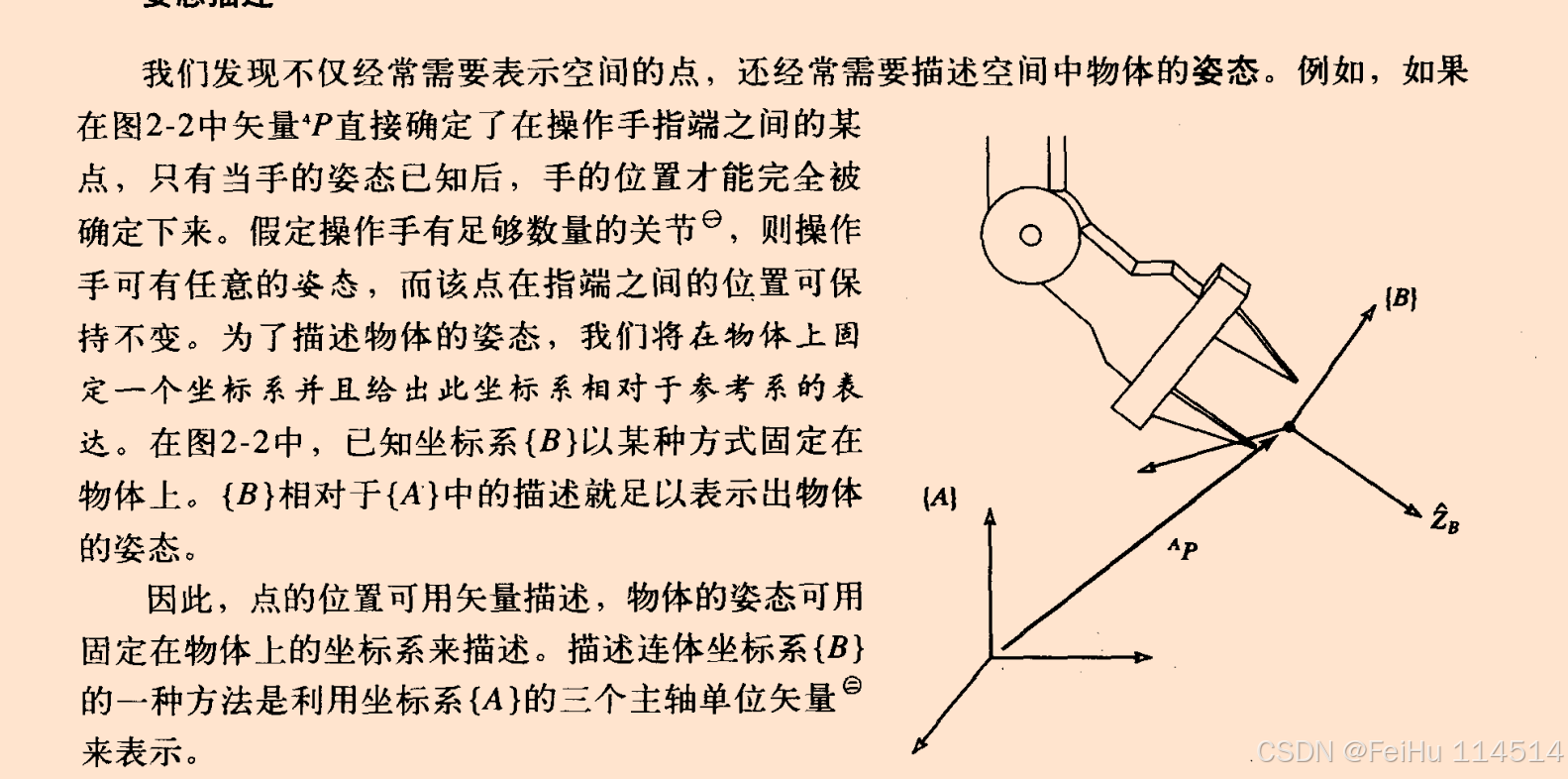
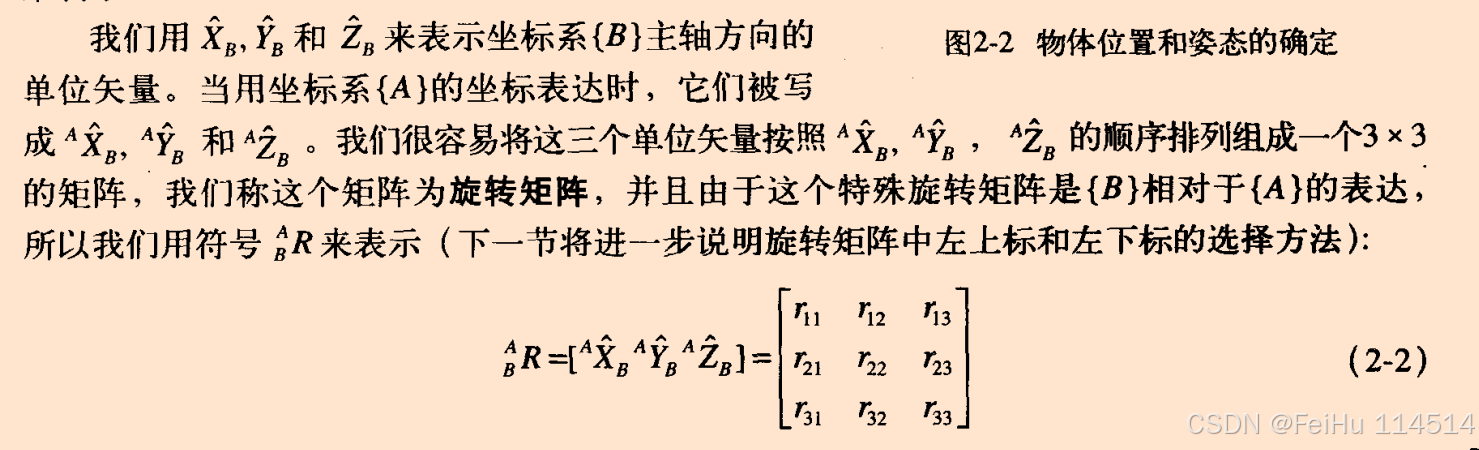
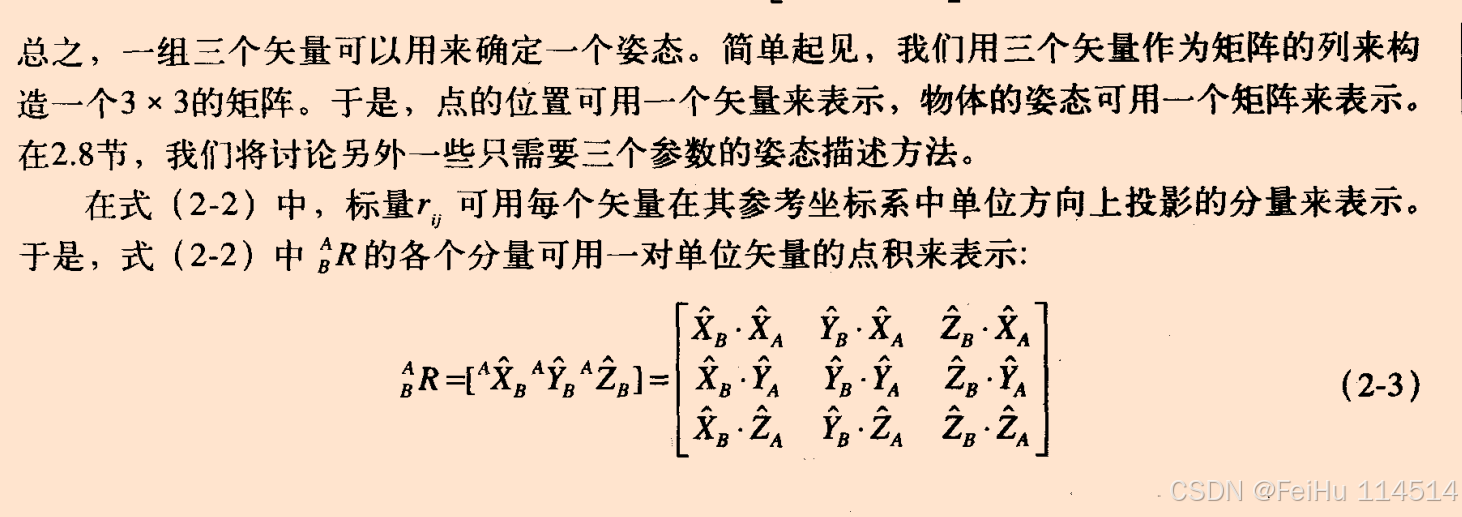
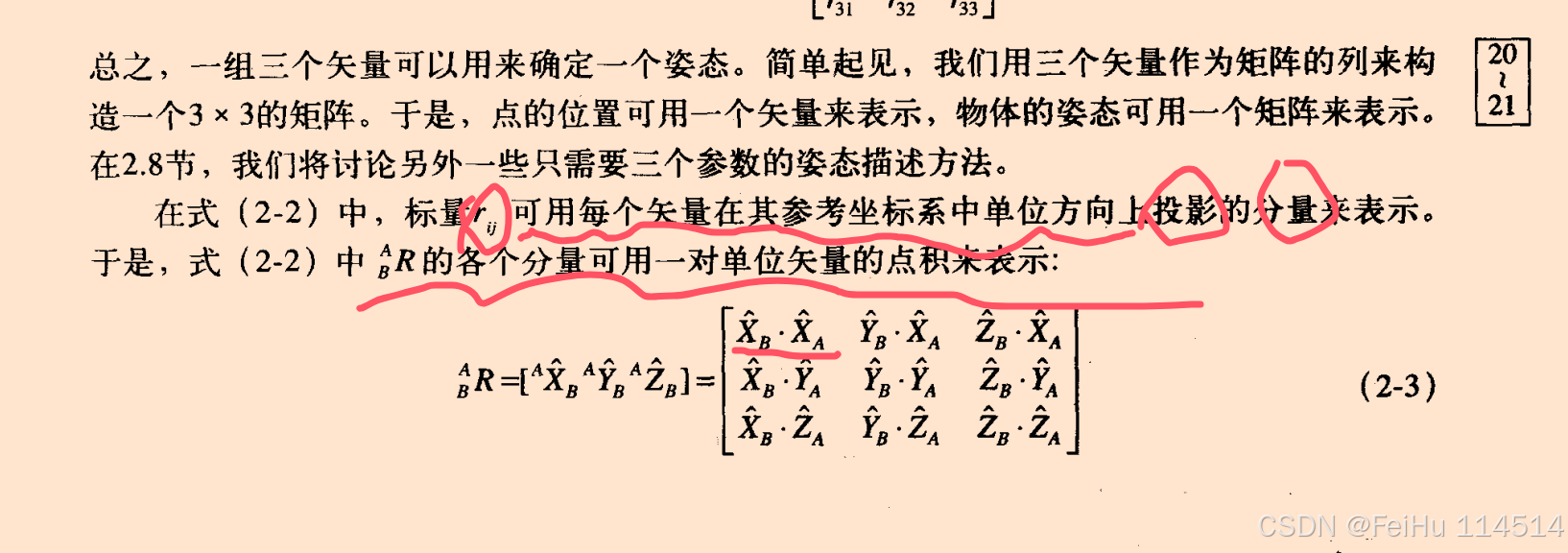
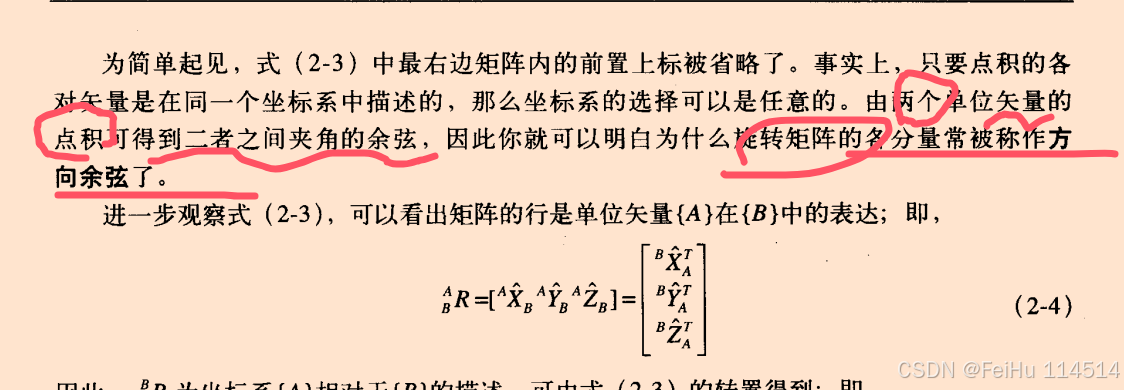
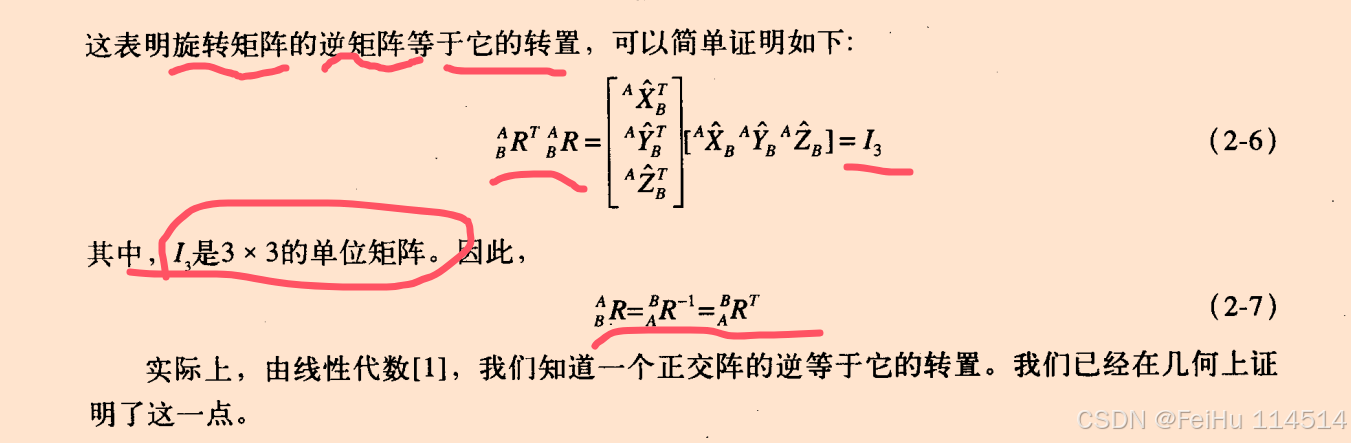
2.姿态描述
机器人
上一篇:
低空经济:万亿级新赛道崛起
下一篇:
XML数据解析与节点配置实操案例教程
相关推荐
ARM+FPGA+AI工业主板定制专家
10 小时前
国产化RK3576+FPGA架构|晶圆传输机器人高速定位+AI瑕疵检测一体化方案
fpga开发
·
架构
·
机器人
·
嵌入式
·
fpga
·
工控
·
机器人运控
视图猿人
11 小时前
ROS2 AGV SLAM导航仿真系统技术详解与踩坑实录
机器人
·
ros2
CoreTK_EMC
13 小时前
机器人 EMC 深度解析:产业放量下的技术痛点与落地路径
机器人
·
芯通康
·
机器人emc
·
人形机器人电磁兼容
·
伺服关节 emc 防护
·
机器人灵巧手 emc
·
emc 整改
一颗小树x
14 小时前
机器人世界模型:2026 技术全景与工程选型指南
机器人
·
指南
·
操作
·
vla
·
世界模型
机器人落地派
18 小时前
机器人项目变更闭环检查表:别只写“已经改了”
人工智能
·
机器人
·
人形机器人
·
机器人落地
·
评审
workflower
19 小时前
供应链分销网络选址问题
人工智能
·
机器学习
·
设计模式
·
自然语言处理
·
机器人
硅谷秋水
2 天前
ABot-M0.5:统一的移动-与-操作世界动作模型
人工智能
·
深度学习
·
机器学习
·
计算机视觉
·
语言模型
·
机器人
计算机魔术师
2 天前
宇树发布轮足机器人 As2-W:6m/s速度、IP54防水、30km续航
网络
·
机器人
our_times
2 天前
【硬核实战】当机器人走进厨房:Java后端如何重构物联网并发与状态一致性`。
java
·
重构
·
机器人
我送炭你添花
2 天前
HART协议详解:00 为什么工业世界仍然需要HART?
网络
·
机器人
·
自动化
·
智能工厂
热门推荐
01
GitHub 镜像站点
02
如何新建文件夹? 电脑新建文件夹的4种方法
03
2026年7月AI圈大地震:GPT-5.6被政府限制、Claude入驻Slack、Anthropic自研芯片
04
国内可直接用、免费额度/永久免费的大模型API清单(含 SiliconFlow、火山、阿里、智谱、百度、Kimi、DeepSeek、DMXAPI 等)
05
AI科技热点日报 | 2026年07月01日
06
2026 国产 AI 大模型横评:DeepSeek、通义千问、Kimi、文心一言、星火、豆包谁更能打?
07
幻兽帕鲁 - 服务器管理员权限与 GM 命令完全指南
08
AI 编程 IDE 全景解析 2026:Agent 全面接管开发链路
09
微信历史版本含下载地址( Windows PC | 安卓 | MAC )及设置微信不更新
10
2026 年 AI 大模型 & AI 编程工具实战全总结
 来描述
来描述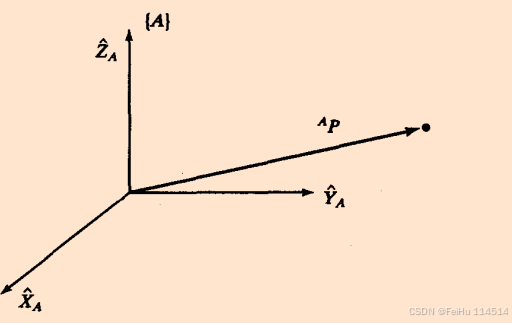 AP这个向量
AP这个向量