面向工业无人机的空间智能-基于AiBrainBox-V的GNSS+语义导航、边缘智能与 VLA:赋能电力巡检、工业检测、复杂环境自主飞行与具身智能研究
《面向工业无人机的空间智能白皮书》
基于 AiBrainBox-V 的 GNSS+语义导航、边缘智能与 VLA 研究平台
赋能电力巡检、工业检测、复杂环境自主飞行与具身智能研究

工业无人机空间智能研究标准平台
AiBrainBox-V:重新定义工业无人机空间智能
AiBrainBox-V:Redefining Spatial Intelligence for Industrial UAV
工业无人机正从:
-
遥控执行
-
自动巡检
走向:
空间智能自主体(Spatially Intelligent Autonomous Agent)

AiBrainBox-V 提供:
-
通感算控一体
-
GNSS + Semantic Navigation
-
Edge Spatial AI
-
LLM/VLA Integration
形成工业无人机空间智能研究基础设施。
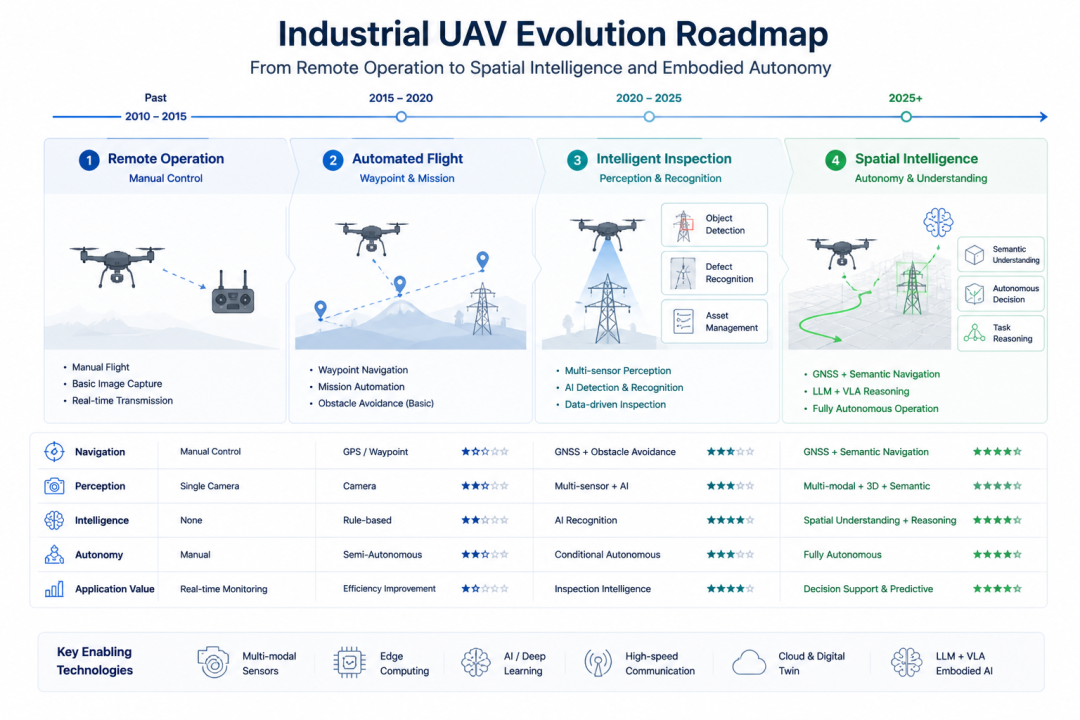
工业无人机发展趋势 Industrial UAV Evolution
第一阶段:Remote Inspection
第二阶段:Autonomous Navigation
第三阶段:Semantic Understanding
第四阶段:Spatial Intelligence + VLA
当前挑战Current Challenges
(1)GNSS依赖严重Strong GNSS Dependence
场景:
-
输电走廊遮挡
-
山区
-
城市峡谷
-
电磁干扰区
(2)缺乏语义理解Lack of Semantic Understanding
传统系统只能:
-
避障
-
定点飞行
无法:
-
理解设备语义
-
理解巡检任务
(3)边缘算力不足Insufficient Edge Intelligence
(4)工业知识无法闭环No Knowledge-to-Action Loop
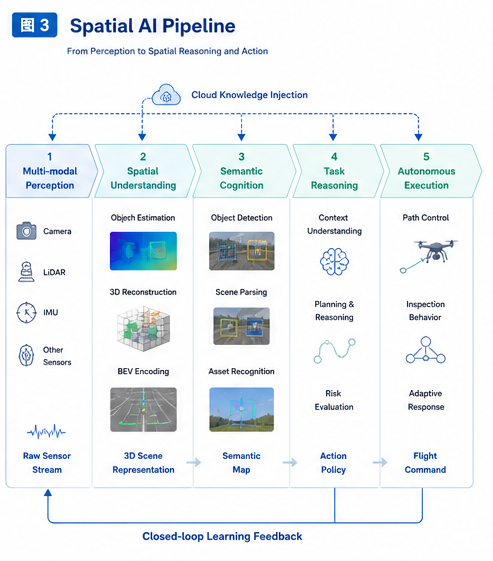
空间智能Spatial AI
空间智能是智能体对三维物理环境进行感知、建模、理解、推理与行动的能力。
核心能力:
Perception-多模态感知
Localization&Mapping-空间定位&场景建图
Semantic Understanding-语义理解
Reasoning-任务推理
Action-执行控制
工业无人机空间智能特征
Spatial AI Characteristics for Industrial UAV
重点:
Geometry-aware
Semantics-aware
Task-aware
Physics-aware
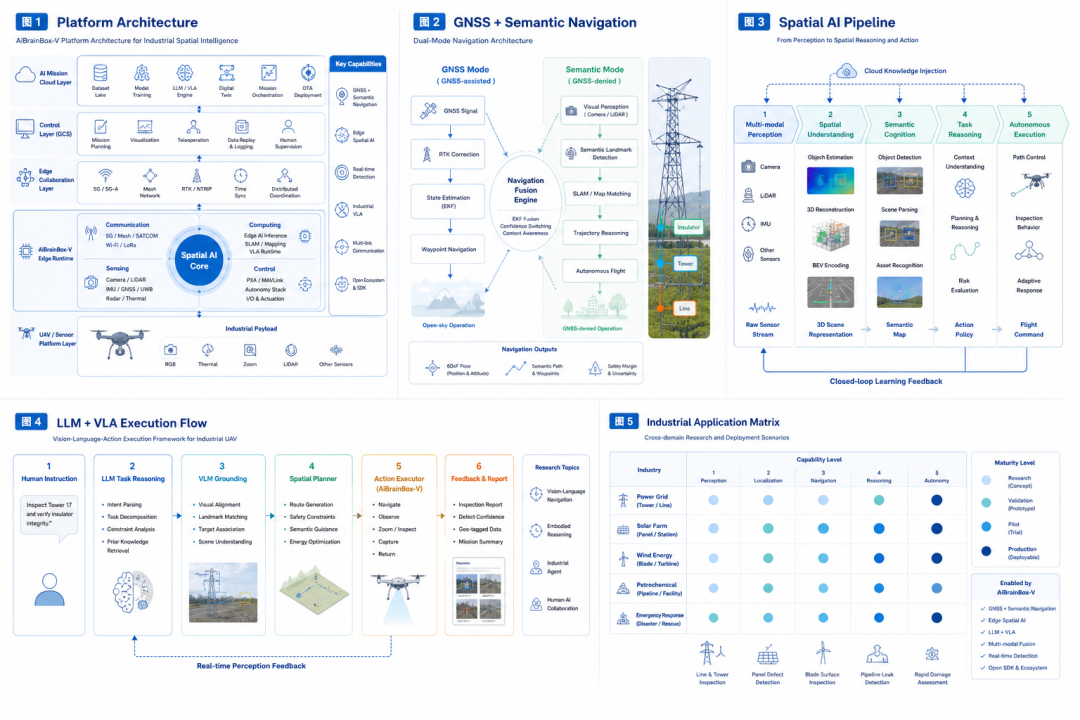
AiBrainBox-V&系统平台架构
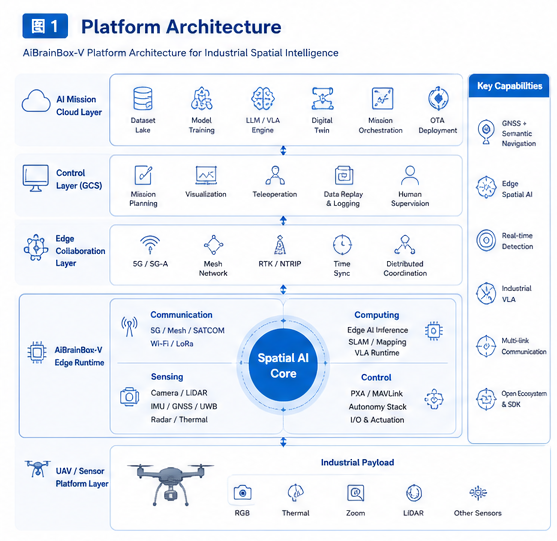
核心模块Core Modules
Multi-modal Sensor Interface
支持:
-
LiDAR
-
RGB
-
Stereo
-
Thermal
-
mmWave
-
IMU
-
GNSS
-
UWB
Edge AI Computing
支持:
-
Real-time Detection
-
Semantic Segmentation
-
SLAM
-
VLA Runtime
Flight Interface Layer
支持:
-
PX4
-
MAVLink
-
Custom FAL
Communication Stack
支持:
-
5G
-
Mesh
-
Satellite
-
RTK
双模导航范式Dual Navigation Paradigm
模式A:GNSS-assisted
适用于:开放环境
模式B:Semantic Navigation
适用于:GNSS拒止环境
依赖:
-
Visual SLAM
-
Semantic Map
-
Landmark Matching
Dual Navigation Architecture
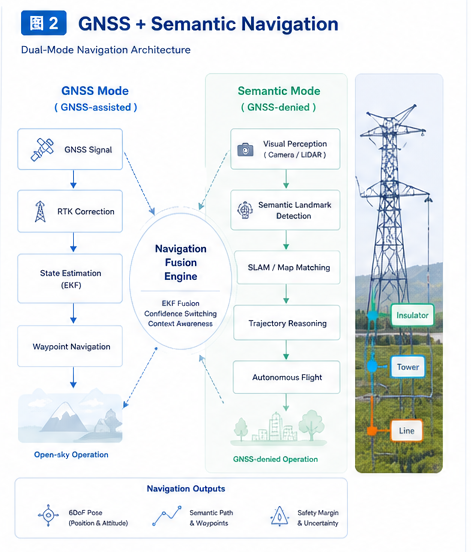
语义导航流程Semantic Navigation Pipeline
-
Scene Perception
-
Object Recognition
-
Semantic Mapping
-
Path Reasoning
-
Flight Execution
电力巡检案例Powerline Inspection Case
示例:
"Inspect insulator string at tower #17"
系统自动:
-
定位杆塔
-
建立语义坐标
-
规划接近路径
-
执行巡检
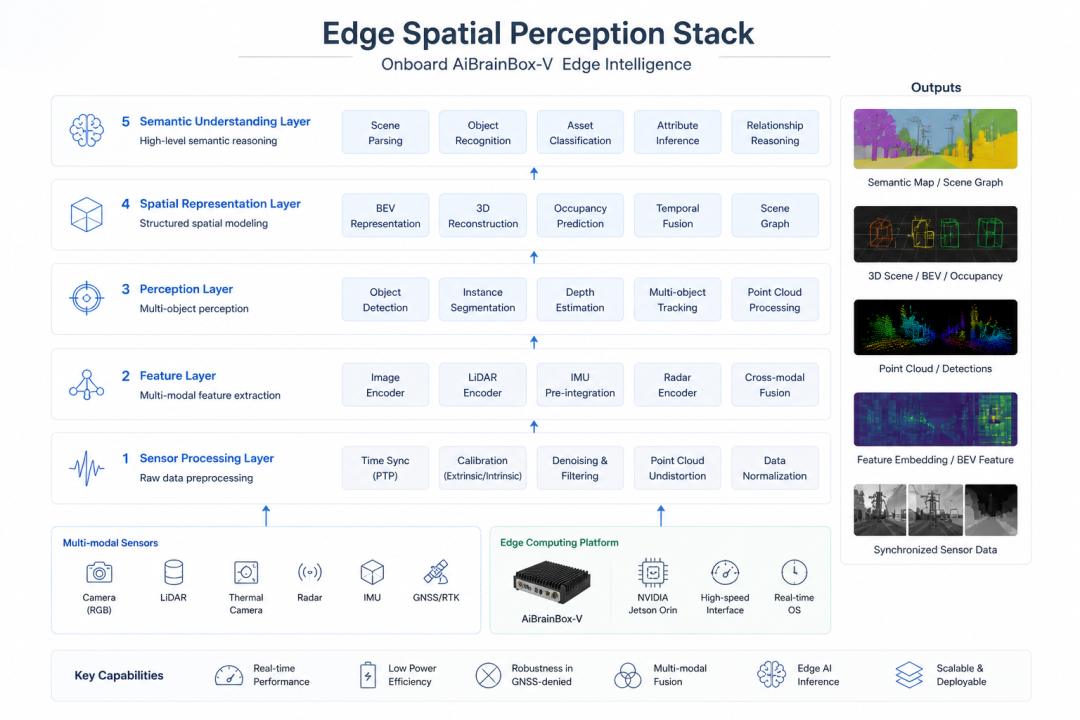
边缘空间AI
1 Onboard 3D Perception
2 Real-time Semantic Understanding
能力:
-
Defect Detection
-
Asset Classification
-
Scene Parsing
3 BEV Spatial Representation
4 3D Reconstruction
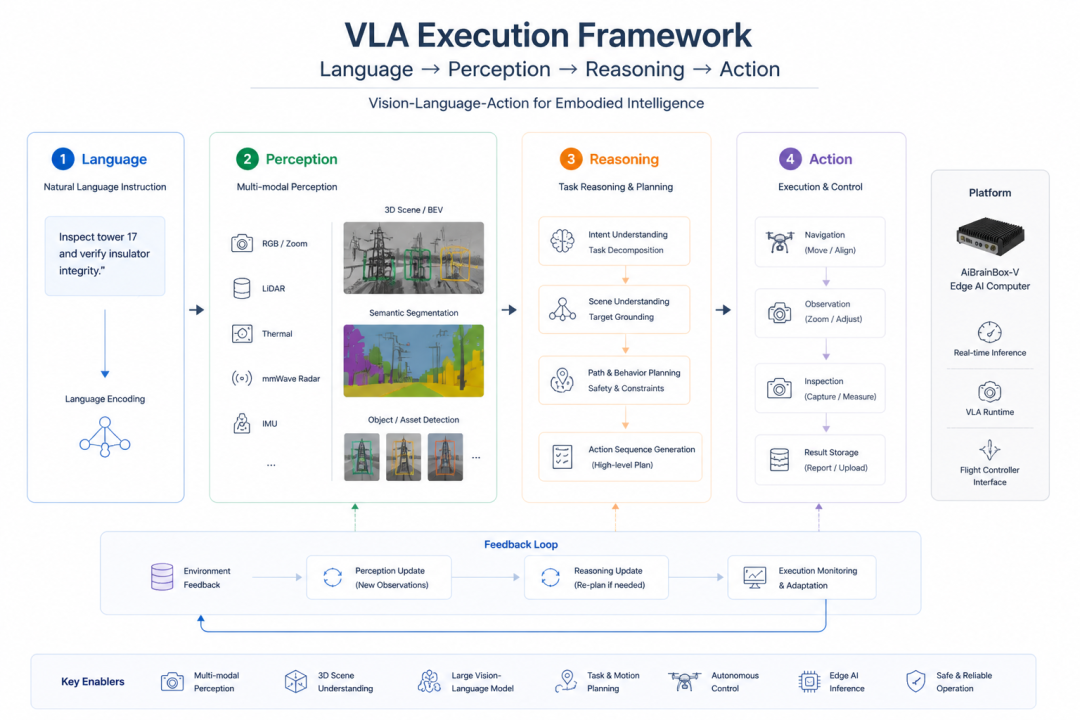
LLM + VLA
为什么工业无人机需要VLA
传统:Waypoint Control
升级:Task-level Intelligence
VLA执行框架
输入:自然语言任务
例如:
Inspect tower 17 and verify insulator integrity
处理:LLM Reasoning
输出:Action Sequence
执行:UAV Autonomy
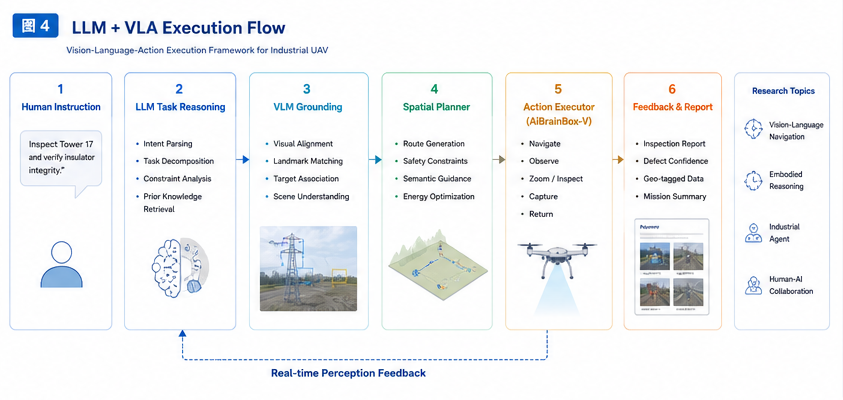
典型研究方向
Vision-Language Navigation
Task Grounding
Embodied Reasoning
Industrial Agent
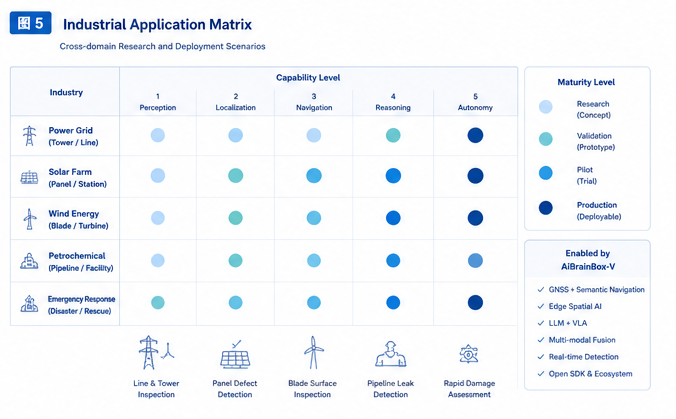
应用场景
电力巡检Power Grid Inspection
光伏巡检Solar Farm Inspection
石化巡检Petrochemical Inspection
风电巡检Wind Turbine Inspection
应急巡查Emergency Response
科研支持体系
提供:
Hardware SDK
Sensor APIs
Dataset Pipeline
Edge Deployment Framework
Simulation Toolkit
ROS2 Support
VLA Development Interface
联合研究方向
适合高校申报:
GNSS-Denied Spatial Navigation
Semantic Inspection
Edge Embodied Intelligence
Industrial VLA
Swarm Spatial Intelligence
路线图Roadmap
2026:Edge Spatial AI
2027:Industrial VLA
2028:Multi-UAV Cooperative Spatial Intelligence
2029:Embodied Industrial Agent Network