仓库拉取
bash
git clone https://github.com/autowarefoundation/autoware.git
vcs import src < repositories/autoware.repos编译
bash
colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release -DCOMPILE_WARNING_AS_ERROR=OFF -DBUILD_TESTING=OFF --parallel-workers 1问题:
- autoware_path_optimizer失败:
需要acados、t_renderer。
注意,编译acados编译默认的python路径是cados/.venv/bin,需要软连接指定系统python
bash
mkdir -p /home/hp-omen-lc/Programs/acados/.venv/bin
ln -sf /usr/bin/python3 /home/hp-omen-lc/Programs/acados/.venv/bin/python3
/home/hp-omen-lc/Programs/acados/.venv/bin/python3 --version- ros2agnocast失败:
升级python插件:
bash
python3 -m pip install -U setuptools colcon-ros colcon-common-extensions资源下载
地图:
bash
wget https://autoware-files.s3.us-west-2.amazonaws.com/maps/demos/sample-map-planning.zip -O /home/hp-omen-lc/autoware_map/sample-map-planning.zip场景:
bash
git clone https://github.com/autowarefoundation/autoware_sample_scenarios.git仿真启动
CPU启动:
bash
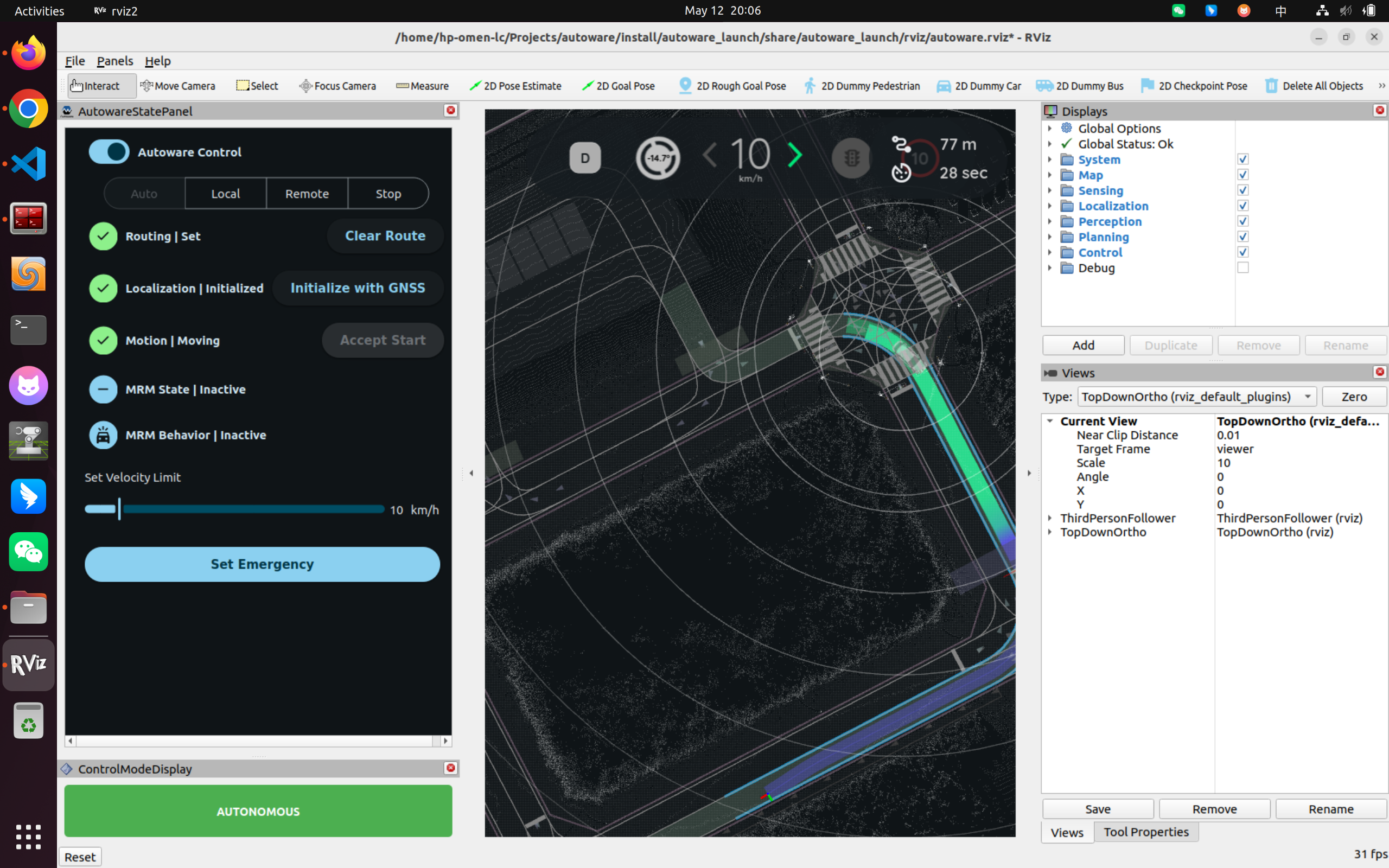
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=/home/hp-omen-lc/autoware_data/maps/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kitGPU启动:
bash
__NV_PRIME_RENDER_OFFLOAD=1 __GLX_VENDOR_LIBRARY_NAME=nvidia ros2 launch autoware_launch planning_simulator.launch.xml map_path:=/home/hp-omen-lc/autoware_data/maps/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit rviz:=true use_gpu:=true perception_mode:=template模拟效果