子空间
之前提到过 s p a n span{} span张成空间,可以从这一点出发来理解子空间
子空间 s u b s p a c e H subspace H subspaceH必须满足
三个基本条件
1.包含零向量
2.加法封闭
3.数乘封闭
加法封闭: v 1 , v 2 ∈ H v_1,v_2\in H v1,v2∈H,那么需要满足 v 1 + v 2 ∈ H v_1+v_2 \in H v1+v2∈H
数乘封闭: v 1 , v 2 ∈ H v_1,v_2\in H v1,v2∈H,那么需要满足 2 v 2 ∈ H 2v_2 \in H 2v2∈H
2,3这两点和 s p a n span span的定义很相似, s p a n v 1 , v 2 span{v_1,v_2} spanv1,v2的张成空间是 v 1 , v 2 v_1,v_2 v1,v2通过各种数乘加法得到的一整个二维空间
零向量,为什么需要包含零向量?对于k维一个空间来说,他最基本的就是"原点" 0 ⃗ \vec 0 0 和k个线性无关的向量,这样整合出k维空间
column space列空间
- m × n m × n m×n矩阵A的列空间是 A A A的列的所有线性组合的集合,用 C o l A Col A ColA表示。证明 C o l A Col A ColA是 R m R^m Rm的一个子空间。
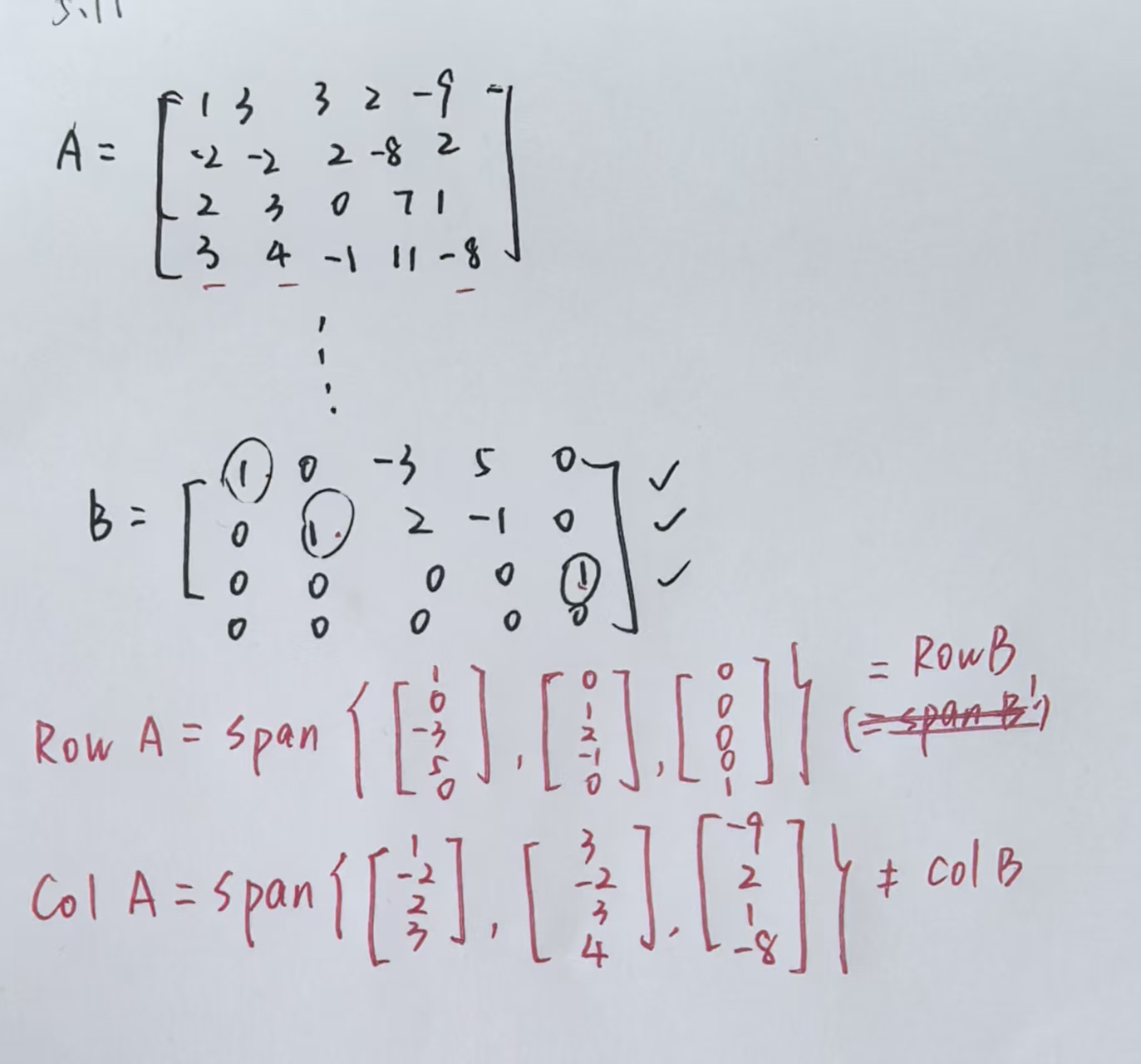
2.其中,对于一些矩阵 A A A将他化简为(简化)阶梯形式 B B B,因为 A A A转化到 B B B的过程中进行的是初等行变换,是对矩阵的行向量进行重新组合,没有改变列向量 a 1 i , a 2 i , a 3 i . . . . a m i a_{1i},a_{2i},a_{3i}....a_{mi} a1i,a2i,a3i....ami之间的线性相关关系,所以即使改变了列空间导致 C o l B ≠ C o l A Col B\neq Col A ColB=ColA,但是他们的变量位置一样,依然可以得到 C o l A Col A ColA
C o l B Col B ColB是basis variables 部分
row space行空间
- m × n m × n m×n矩阵A的行空间是 A A A的列的所有线性组合的集合,用 R o w A Row A RowA表示。证明 R o w A Row A RowA是 R n R^n Rn的一个子空间。
2.因为初等行变换的本质,就是对行向量进行线性组合。变换后的每一行,都是原来各行的一个线性组合,是"可逆的"。换句话说,变化前后的张成空间是一样的,由原来span{ x ⃗ 1 , x ⃗ 2 {\vec x_1,\vec x_2} x 1,x 2}到span{ x 1 + 2 x 2 ⃗ , x 1 − x 2 ⃗ {\vec {x_1+2x_2},\vec {x_1-x_2}} x1+2x2 ,x1−x2 } 只是基底换了一下,但是空间没有任何变化,所以即便改变了行向量之间的线性相关关系,但 R o w A = R o w B Row A=Row B RowA=RowB
null space零空间
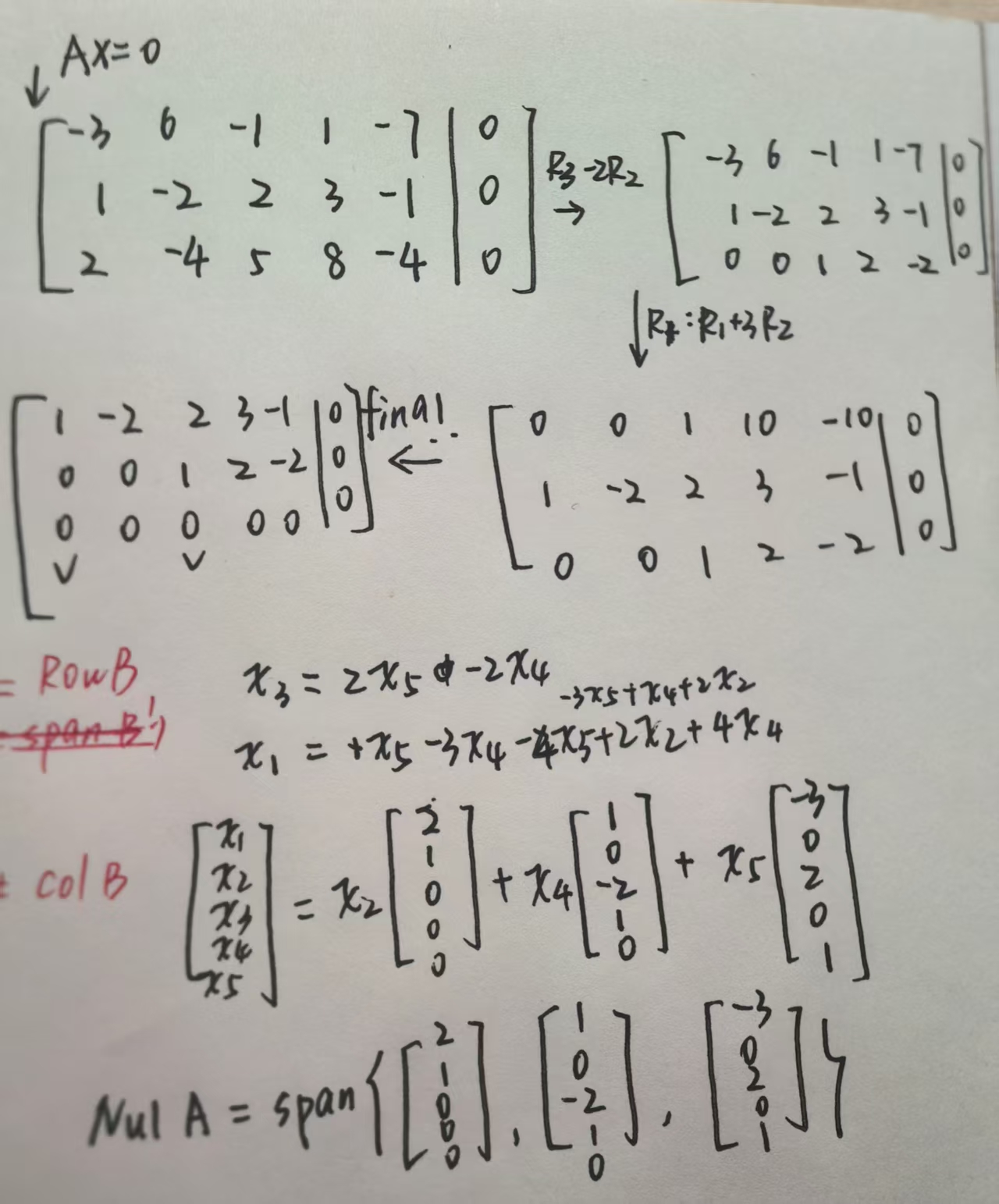
一个 m × n m × n m×n矩阵A的零空间是集合{ x ∣ A x = 0 x|Ax = 0 x∣Ax=0},用 N u l A Nul A NulA表示。证明 N u l A Nul A NulA是 R n R^n Rn的一个子空间。
是否还记得我们之前提到过 A x = b Ax=b Ax=b的解是 p + V ⃗ n p+\vec V_n p+V n特解和非特解部分,之后我们在这里求的就是非特解部分
basis基
A A A的子空间 H H H的一组基是 H H H中的一个线性无关的集合,它张成 H H H。
上面我们说的 R o w A Row A RowA C o l B Col B ColB以及 N u l A Nul A NulA等等求出的都是基本向量,他们都是线性无关的,而他们的空间就是由基本向量(也就是基)不断地加法数乘运算张成出来的空间。
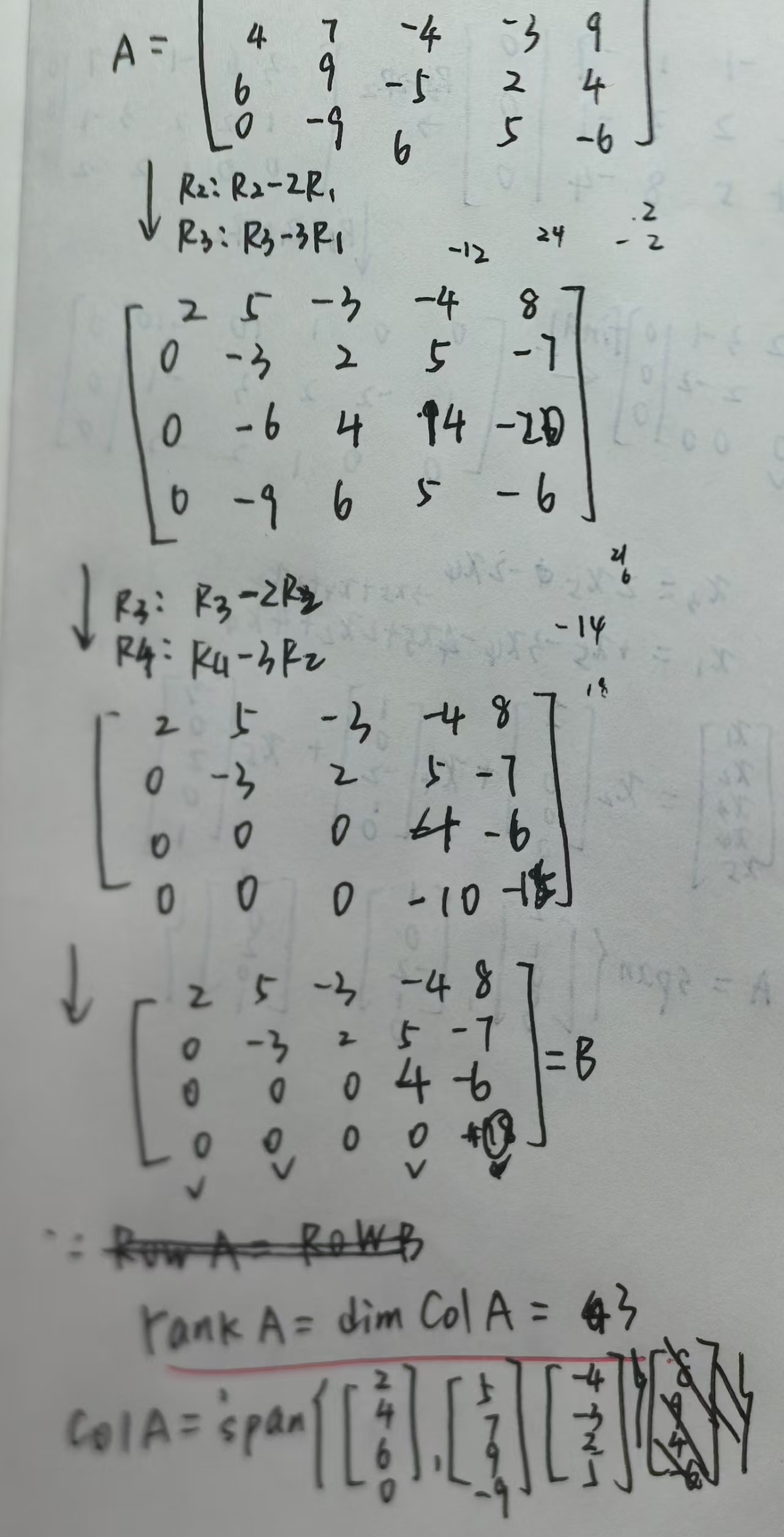
例题练习
2.
维度和等级
坐标
1.定义有:假设 B B B= { b 1 , b 2 , ... , b p b_1, b_2,..., b_p b1,b2,...,bp}是子空间 H H H的一组基,每个 x ∈ h x∈h x∈h可以唯一地写成 x = c 1 b 1 + c 2 b 2 + . . . + c p b p x=c_1b_1+c_2b_2+...+c_pb_p x=c1b1+c2b2+...+cpbp其中{ c 1 , ... , c p c1,..., cp c1,...,cp}是x相对于基底B的坐标。
向量 ( c 1 c 2 . . . c p ) \begin{pmatrix}c_1\\c_2\\...\\c_p \end{pmatrix} c1c2...cp
( c 1 c 2 . . . c p ) \begin{pmatrix}c_1\\c_2\\...\\c_p \end{pmatrix} c1c2...cp
是x相对于B的坐标向量或者x的B坐标向量
2.这里其实就是x在不同基底下的表示
例如x= ( 2 1 ) \begin{pmatrix}2\\1 \end{pmatrix} (21) 在基底{ ( 1 0 ) \begin{pmatrix}1\\0\end{pmatrix} (10) ( 0 1 ) \begin{pmatrix}0\\1\end{pmatrix} (01)}
下的坐标就是 ( 2 1 ) \begin{pmatrix}2\\1\end{pmatrix} (21)
在基底{ ( 1 − 1 ) \begin{pmatrix}1\\-1\end{pmatrix} (1−1) ( 1 2 ) \begin{pmatrix}1\\2\end{pmatrix} (12)}下的坐标就是 ( 1 1 ) \begin{pmatrix}1\\1\end{pmatrix} (11)
维度dimension
非零子空间 H H H的维数,用 d i m H dim H dimH表示,是 H H H的任意基中向量的个数。零子空间{ 0 0 0}的维数为零。
等级rank(秩)
矩阵 A A A的秩,用 R a n k A Rank A RankA表示,是 A A A的列空间的维数。也就是等于列空间基向量的个数= d i m C o l A dim ColA dimColA
基本定理
如果 H H H是 R n R^n Rn的p维子空间,
-
H H H中恰好包含p个元素的任何线性无关集合是 H H H的一组基
-
H H H中包含p个元素的任何集合张成 H H H是 H H H的一组基
这两个定理可以说是互相印证相互充分必要,p维子空间 H H H必定有一组基由p个线性无关的向量组成的;能张成空间的p个向量肯定是p维空间的一组基
3.如果 A A A 是 m × n m × n m×n的矩阵,那么有 r a n k A + d i m N u l A = n rank A + dim Nul A = n rankA+dimNulA=n
r a n k A = r a n k A T rank A = rank A^T rankA=rankAT
其中 d i m N u l A = dim Nul A= dimNulA=free variables 的个数
例题