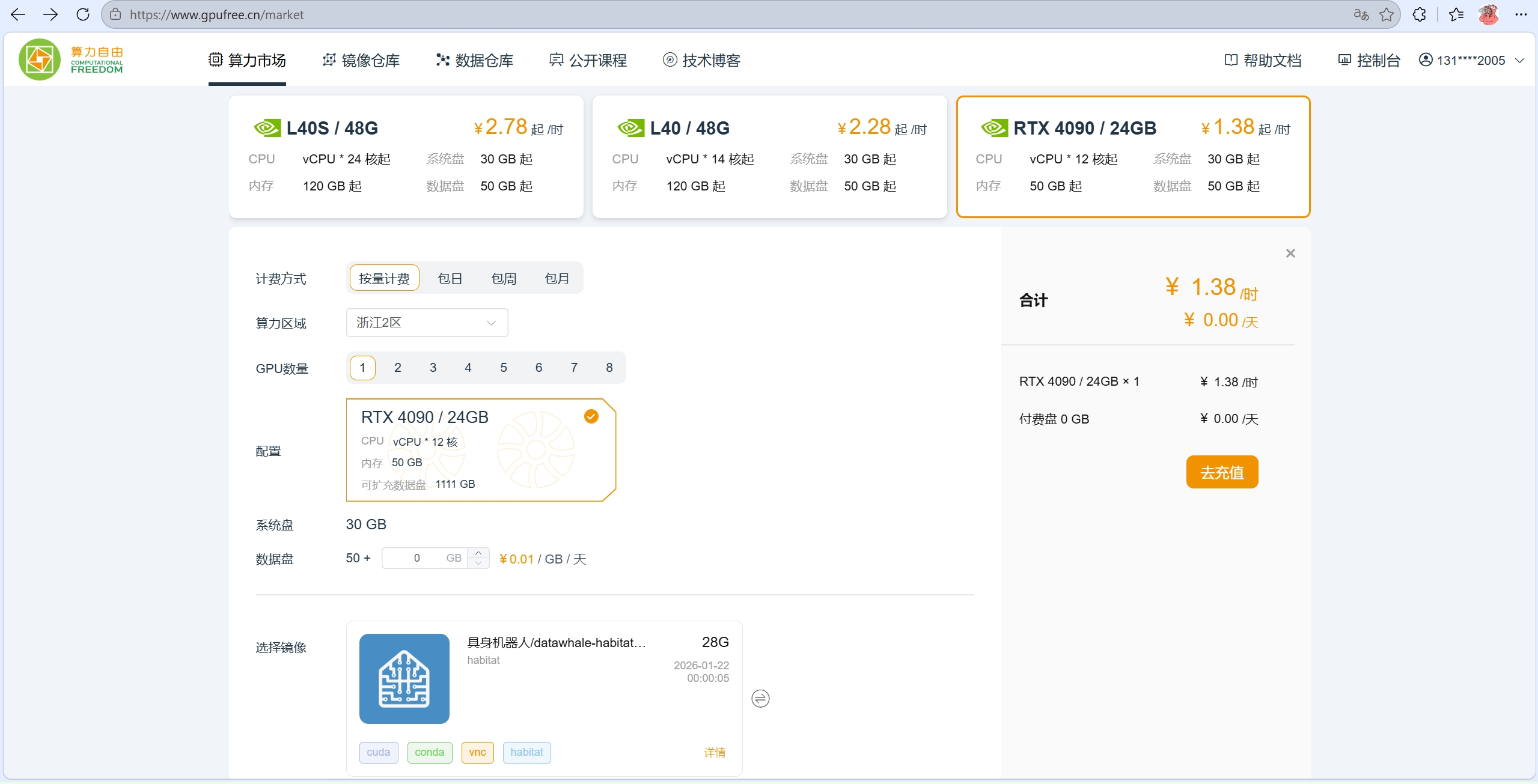
本人是在该平台进行仿真训练,Datawhale 社区已经部署好环境了。
1.打开

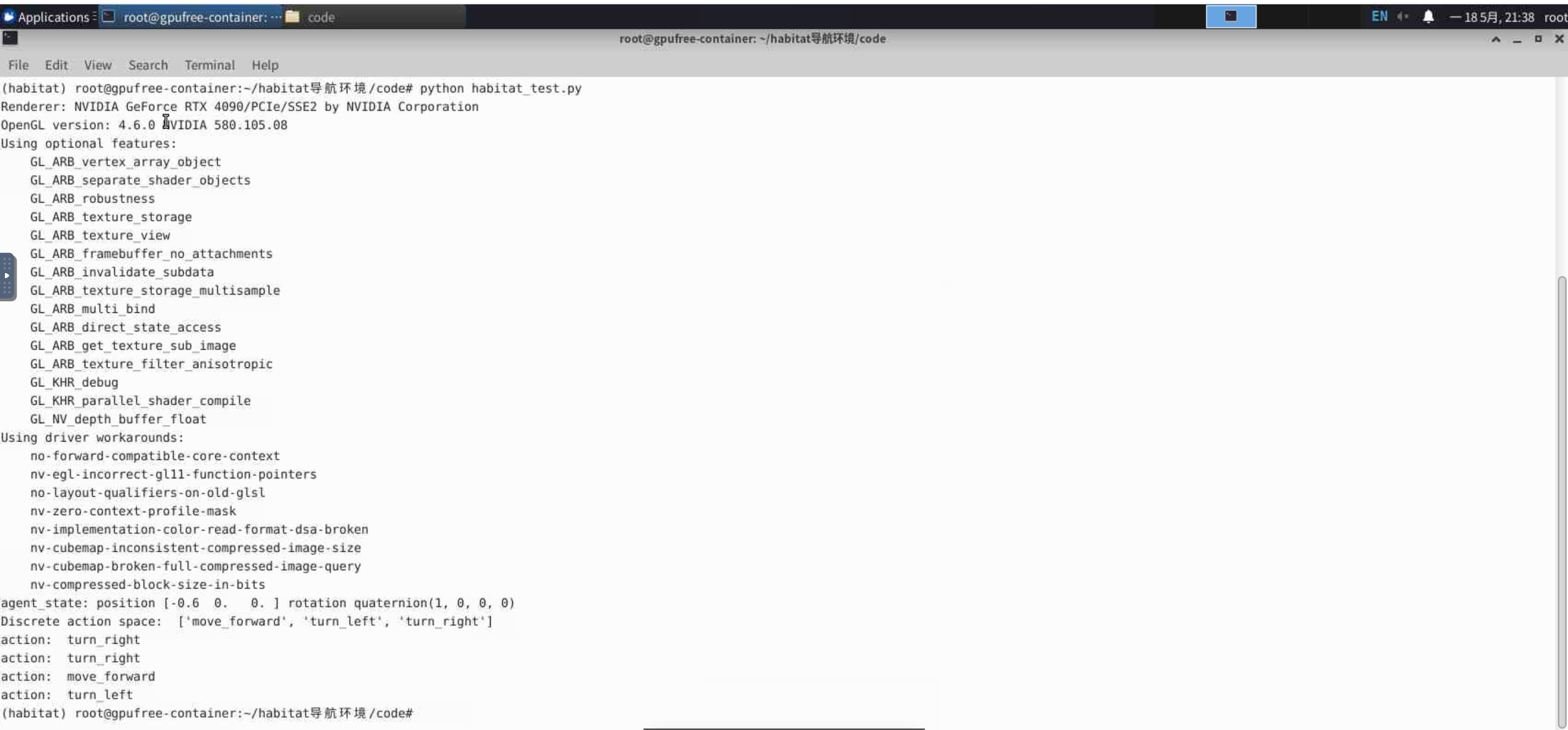
2.进入界面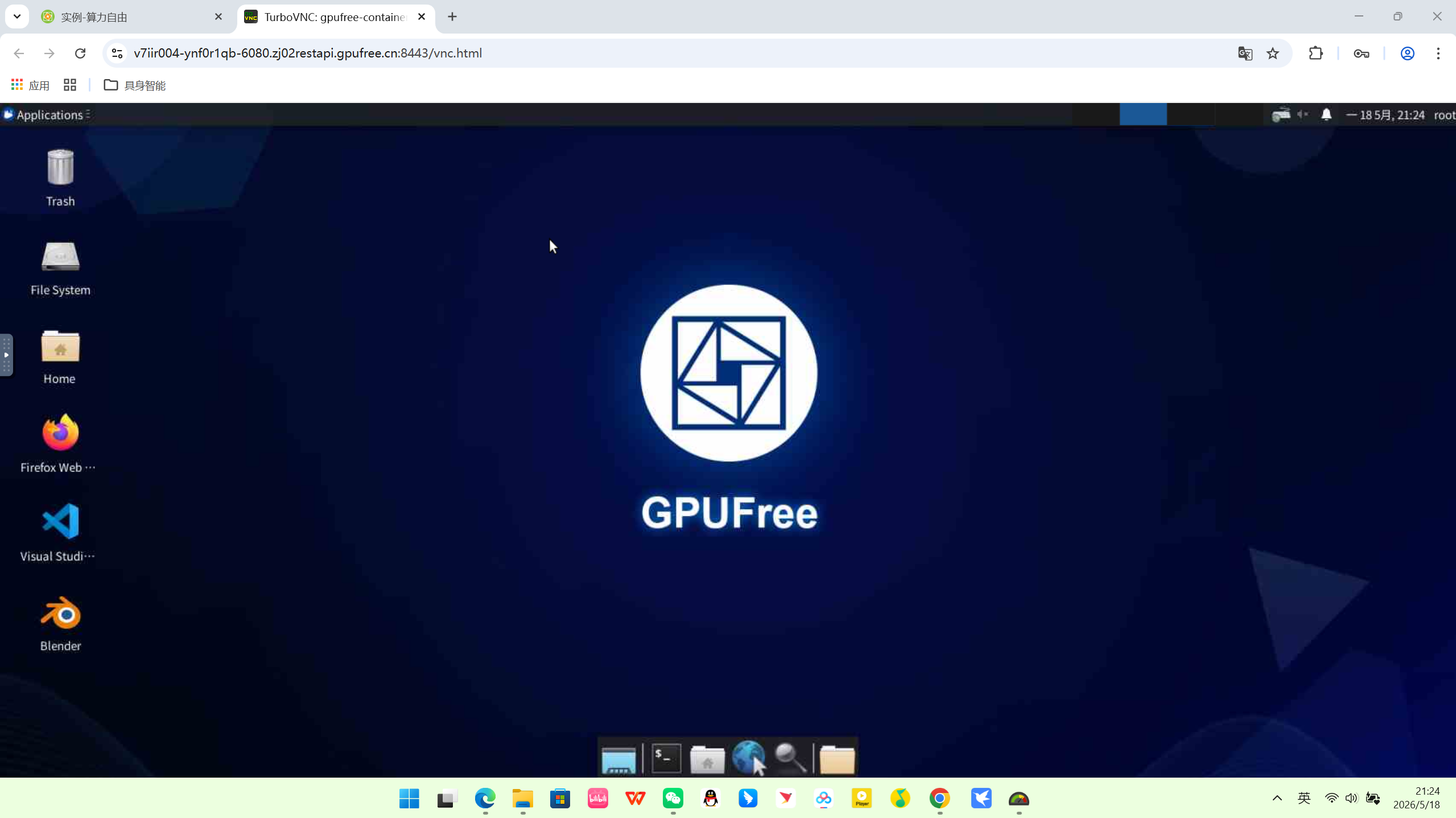 3.进入相应文件,右击鼠标打开终端,执行命令 python + 文件名,运行文件(操作命令跟Linux差不多)
3.进入相应文件,右击鼠标打开终端,执行命令 python + 文件名,运行文件(操作命令跟Linux差不多)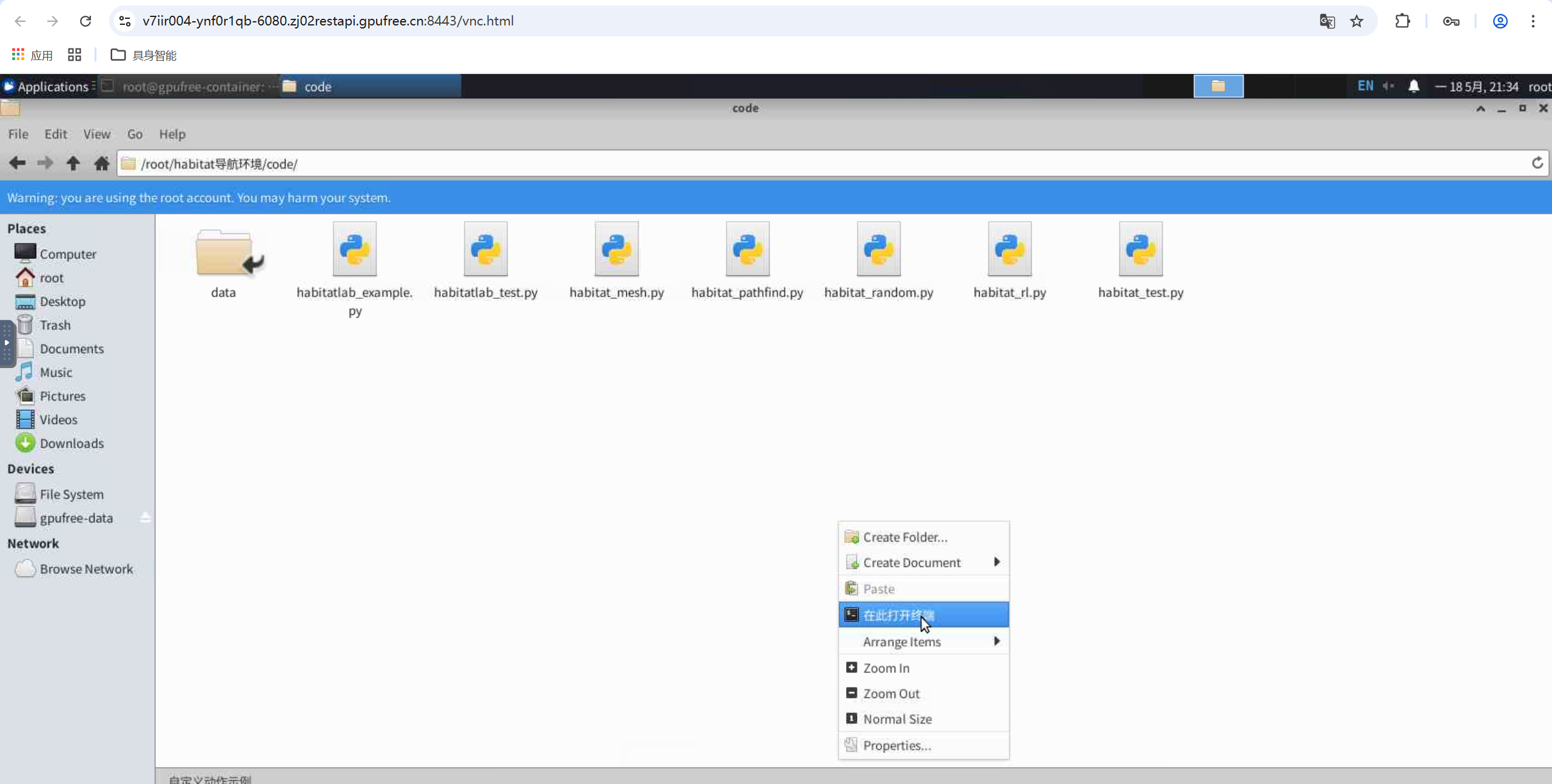
注:本文资料源自Datawhale社区,学习链接 AI通识课:AI+具身智能-课程详情 | Datawhale
本人是在该平台进行仿真训练,Datawhale 社区已经部署好环境了。
1.打开
2.进入界面3.进入相应文件,右击鼠标打开终端,执行命令 python + 文件名,运行文件(操作命令跟Linux差不多)
注:本文资料源自Datawhale社区,学习链接 AI通识课:AI+具身智能-课程详情 | Datawhale