epoll原理及实现
文章目录
- epoll原理及实现
-
- [一、 发展历史](#一、 发展历史)
-
- [API 发布的时间线](#API 发布的时间线)
- 二、epoll是什么
- 三、epoll接口示例代码
-
- [1. 监听键盘输入](#1. 监听键盘输入)
- [2. 监听本地socket文件](#2. 监听本地socket文件)
- 四、锁与内存屏障问题(写在前面)
- 五、核心数据结构
-
- [1. struct eventpoll](#1. struct eventpoll)
-
- 1) wq队列 wq队列)
- 2) poll_wait队列 poll_wait队列)
- 3) ovflist队列的启用 ovflist队列的启用)
- [2. struct epitem](#2. struct epitem)
-
- 1) epitem->ffd->file和eventpoll->file epitem->ffd->file和eventpoll->file)
- 2) rdllist & rdllink和ovflist & next双链表 rdllist & rdllink和ovflist & next双链表)
- [3. struct eppoll_entry](#3. struct eppoll_entry)
- 六、epoll基本流程
-
- [1. epoll基本流程图](#1. epoll基本流程图)
- [2. 创建epoll实例](#2. 创建epoll实例)
- [3. 修改监听句柄](#3. 修改监听句柄)
- [4. 等待句柄活跃](#4. 等待句柄活跃)
- [5. 监听句柄活跃触发回调ep_poll_callback](#5. 监听句柄活跃触发回调ep_poll_callback)
- [6. 扫描就绪链表](#6. 扫描就绪链表)
- [7. 分类处理水平触发(LT)和边沿触发(ET)并返回就绪事件](#7. 分类处理水平触发(LT)和边沿触发(ET)并返回就绪事件)
- 七、epoll实例增删改查
-
- [1. ep_insert函数](#1. ep_insert函数)
- [2. ep_remove函数](#2. ep_remove函数)
- [3. ep_modify函数](#3. ep_modify函数)
- [4. ep_find函数](#4. ep_find函数)
- 八、面向VFS部分的接口
- 九、其他模块的poll方法实现
-
- [1. 驱动层面对文件系统的监听](#1. 驱动层面对文件系统的监听)
- [2. 内核等待队列](#2. 内核等待队列)
- 十、epoll与select、poll的对比
- 十一、总结
- 参考文档
一、 发展历史
API 发布的时间线
下文中列出了网络 IO中,各个api的发布时间线
1983,socket 发布在 Unix(4.2 BSD)
1983,select 发布在 Unix(4.2 BSD)
1994,Linux的1.0,已经支持socket和select
1997,poll 发布在 Linux 2.1.23
2002,epoll发布在 Linux 2.5.44
可以看到select、poll 和 epoll,这三个"IO多路复用API"是相继发布的。这说明了,它们是IO多路复用的3个进化版本。因为API设计缺陷,无法在不改变 API 的前提下优化内部逻辑。所以用poll替代select,再用epoll替代poll
epoll和poll还有select都是监听socket的接口,poll还有select出现的时间更早,但是性能更差。后来在此继承上发展改进得到了epoll
二、epoll是什么
epoll是一种I/O事件通知机制,是linux内核实现IO多路复用的一个实现
IO多路复用是指,在一个操作里同时监听多个输入输出源,在其中一个或多个输入输出源可用的时候返回,然后对其的进行读写操作
epoll的通俗解释是一种当文件描述符的内核缓冲区非空的时候,发出可读信号进行通知,当写缓冲区不满的时候,发出可写信号通知的机制
三、epoll接口示例代码
1. 监听键盘输入
创建一个epoll连接,监听标准输入。打印用户输入的值,若输入exit则直接退出结束进程
c
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <errno.h>
#include <sys/epoll.h>
#define MAX_EVENTS 10
static int create_epoll_event()
{
int epoll_fd;
struct epoll_event event = {0};
epoll_fd = epoll_create1(0);
if (epoll_fd < 0)
return -1;
event.events = EPOLLIN;
event.data.fd = STDIN_FILENO;
if (epoll_ctl(epoll_fd, EPOLL_CTL_ADD, STDIN_FILENO, &event) != 0) {
close(epoll_fd);
return -1;
}
return epoll_fd;
}
int main()
{
int n = -1;
int nfds = -1;
int epoll_fd = -1;
ssize_t nr = 0;
char buf[256] = {0};
struct epoll_event events[MAX_EVENTS] = {0};
epoll_fd = create_epoll_event();
if (epoll_fd < 0) {
perror("create_epoll_event");
return 1;
}
while (1) {
// 等待事件发生
nfds = epoll_wait(epoll_fd, events, MAX_EVENTS, -1);
if (nfds < 0) {
if (errno == EINTR)
continue;
perror("epoll_wait");
goto cleanup;
}
// 处理就绪的事件
for (n = 0; n < nfds; ++n) {
if (events[n].data.fd == STDIN_FILENO) {
// 从标准输入中读取数据
nr = read(events[n].data.fd, buf, sizeof(buf) - 1);
if (nr < 0) {
perror("read");
goto cleanup;
}
if (nr == 0)
goto cleanup;
buf[nr] = '\0';
printf("Received input: %s", buf);
// 如果收到exit,则退出循环
if (strcmp(buf, "exit\n") == 0) {
goto cleanup;
}
}
}
}
cleanup:
if (epoll_fd >= 0)
close(epoll_fd);
return 0;
}2. 监听本地socket文件
server端
创建本地socket文件/tmp/epoll_demo.sock并用epoll监听,打印收到的消息,如果消息是exit则会直接结束进程
c
/*
* epoll_server.c
* 作为服务端,监听本地套接字,接受客户端连接,并处理客户端发来的消息。
*/
#include <errno.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/epoll.h>
#include <sys/socket.h>
#include <sys/un.h>
#include <unistd.h>
#define MAX_EVENTS 10
/* 监听套接字(listening socket)句柄,供 epoll 与 accept 使用 */
static const char SOCK_PATH[] = "/tmp/epoll_demo.sock";
static void stop_server()
{
printf("服务器退出\n");
exit(0);
}
static void clean_local_socket(const int lfd)
{
if (lfd >= 0)
close(lfd);
unlink(SOCK_PATH);
}
static int create_local_socket(int *lfd)
{
int ret = 0;
*lfd = socket(AF_UNIX, SOCK_STREAM, 0);
if (*lfd < 0) {
ret = -1;
perror("socket");
goto end;
}
end:
return ret;
}
static int listen_local_socket(int lfd)
{
int ret = 0;
struct sockaddr_un addr = {0};
unlink(SOCK_PATH);
addr.sun_family = AF_UNIX;
snprintf(addr.sun_path, sizeof(addr.sun_path), "%s", SOCK_PATH);
ret = bind(lfd, (struct sockaddr *)&addr, sizeof(addr));
if (ret < 0) {
perror("bind");
goto end;
}
ret = listen(lfd, MAX_EVENTS);
if (ret < 0) {
perror("listen");
goto end;
}
printf("监听 %s 中...\n", SOCK_PATH);
end:
return ret;
}
/* 处理客户端发来的消息 */
static void handle_client_data(int epfd, int cfd)
{
char buf[1024] = {0};
ssize_t nr = 0;
nr = read(cfd, buf, sizeof(buf) - 1);
/* read 返回 0:对端关闭;LT 下若不 epoll_del+close,会一直可读 */
if (nr <= 0) {
epoll_ctl(epfd, EPOLL_CTL_DEL, cfd, NULL);
close(cfd);
goto end;
}
buf[nr] = '\0';
if (strcmp(buf, "exit") == 0)
stop_server();
else
printf("收到: %s\n", buf);
end:
fflush(stdout);
}
/* 新客户端在 Unix 域流套接字上连接成功,将 accept 得到的句柄加入 epoll 监听 */
static int handle_client_connect(int epfd, int fd)
{
int ret = 0;
int cfd = -1;
struct epoll_event ev = {0};
cfd = accept(fd, NULL, NULL);
if (cfd < 0) {
ret = cfd;
perror("accept");
goto end;
}
ev.events = EPOLLIN;
ev.data.fd = cfd;
ret = epoll_ctl(epfd, EPOLL_CTL_ADD, cfd, &ev);
if (ret < 0) {
perror("epoll_ctl");
close(cfd);
goto end;
}
end:
return ret;
}
/* 使用 epoll(事件轮询,默认水平触发 LT)监听 lfd 与新接受的连接 */
static int run_epoll_demo(int lfd)
{
int n = -1;
int i = -1;
int ret = 0;
int epfd = -1;
struct epoll_event ev = {0};
struct epoll_event events[MAX_EVENTS] = {0};
ev.events = EPOLLIN;
ev.data.fd = lfd;
epfd = epoll_create1(0);
if (epfd < 0) {
ret = epfd;
perror("epoll_create1");
goto end;
}
ret = epoll_ctl(epfd, EPOLL_CTL_ADD, lfd, &ev);
if (ret < 0) {
perror("epoll_ctl");
goto end;
}
while(1) {
n = epoll_wait(epfd, events, sizeof(events) / sizeof(events[0]), -1);
if (n < 0) {
ret = n;
perror("epoll_wait");
goto end;
}
for (i = 0; i < n; i++) {
if (events[i].data.fd == lfd) {
/* 新客户端连接成功 */
ret = handle_client_connect(epfd, events[i].data.fd);
if (ret < 0) {
perror("handle_client_connect");
goto end;
}
} else {
/* 已有客户端发来消息,处理数据 */
handle_client_data(epfd, events[i].data.fd);
}
}
}
end:
if (epfd >= 0)
close(epfd);
return ret;
}
int main(void)
{
int ret = -1;
int lfd = -1;
ret = create_local_socket(&lfd);
if (ret < 0) {
perror("create_local_socket");
return 1;
}
ret = listen_local_socket(lfd);
if (ret < 0) {
perror("listen_local_socket");
clean_local_socket(lfd);
return 1;
}
ret = run_epoll_demo(lfd);
if (ret < 0) {
perror("run_epoll_demo");
clean_local_socket(lfd);
return 1;
}
clean_local_socket(lfd);
return 0;
}client端
创建socket绑定到/tmp/epoll_demo.sock,通过socket发送消息
c
/**
* epoll_client.c
* 作为客户端,连接本地套接字,并发送消息给服务端
*/
#include <stdio.h>
#include <string.h>
#include <sys/socket.h>
#include <sys/un.h>
#include <unistd.h>
static const char SOCK_PATH[] = "/tmp/epoll_demo.sock";
static void create_socket(int *fd)
{
struct sockaddr_un addr = {0};
addr.sun_family = AF_UNIX;
snprintf(addr.sun_path, sizeof(addr.sun_path), "%s", SOCK_PATH);
*fd = socket(AF_UNIX, SOCK_STREAM, 0);
connect(*fd, (struct sockaddr *)&addr, sizeof(addr));
}
static void send_message(char *message, const int fd)
{
char buf[1024] = {0};
snprintf(buf, sizeof(buf), "%s", message);
send(fd, buf, strlen(buf) + 1, 0);
}
/* 作为客户端(client)连接epoll_server监听的本地套接字并发送数据 */
int main(int argc, char *argv[])
{
int fd = -1;
if(argc < 2) {
printf("Usage: %s <message>\n", argv[0]);
printf("if want to exit, send 'exit' message\n");
return 1;
}
create_socket(&fd);
send_message(argv[1], fd);
if (fd > 0)
close(fd);
return 0;
}四、锁与内存屏障问题(写在前面)
笔者注:本文对多进程下锁的调度与使用以及多CPU下与内存屏障问题部分不做展开
关于epoll模块对于多进程下锁的处理
附上源代码中注释一段,供读者自行理解
笔者注:所有代码均未删改
c++
// linux-5.4/fs/eventpoll.c
/*
* LOCKING:
* There are three level of locking required by epoll :
*
* 1) epmutex (mutex)
* 2) ep->mtx (mutex)
* 3) ep->lock (rwlock)
*
* The acquire order is the one listed above, from 1 to 3.
* We need a rwlock (ep->lock) because we manipulate objects
* from inside the poll callback, that might be triggered from
* a wake_up() that in turn might be called from IRQ context.
* So we can't sleep inside the poll callback and hence we need
* a spinlock. During the event transfer loop (from kernel to
* user space) we could end up sleeping due a copy_to_user(), so
* we need a lock that will allow us to sleep. This lock is a
* mutex (ep->mtx). It is acquired during the event transfer loop,
* during epoll_ctl(EPOLL_CTL_DEL) and during eventpoll_release_file().
* Then we also need a global mutex to serialize eventpoll_release_file()
* and ep_free().
* This mutex is acquired by ep_free() during the epoll file
* cleanup path and it is also acquired by eventpoll_release_file()
* if a file has been pushed inside an epoll set and it is then
* close()d without a previous call to epoll_ctl(EPOLL_CTL_DEL).
* It is also acquired when inserting an epoll fd onto another epoll
* fd. We do this so that we walk the epoll tree and ensure that this
* insertion does not create a cycle of epoll file descriptors, which
* could lead to deadlock. We need a global mutex to prevent two
* simultaneous inserts (A into B and B into A) from racing and
* constructing a cycle without either insert observing that it is
* going to.
* It is necessary to acquire multiple "ep->mtx"es at once in the
* case when one epoll fd is added to another. In this case, we
* always acquire the locks in the order of nesting (i.e. after
* epoll_ctl(e1, EPOLL_CTL_ADD, e2), e1->mtx will always be acquired
* before e2->mtx). Since we disallow cycles of epoll file
* descriptors, this ensures that the mutexes are well-ordered. In
* order to communicate this nesting to lockdep, when walking a tree
* of epoll file descriptors, we use the current recursion depth as
* the lockdep subkey.
* It is possible to drop the "ep->mtx" and to use the global
* mutex "epmutex" (together with "ep->lock") to have it working,
* but having "ep->mtx" will make the interface more scalable.
* Events that require holding "epmutex" are very rare, while for
* normal operations the epoll private "ep->mtx" will guarantee
* a better scalability.
*/五、核心数据结构
1. struct eventpoll
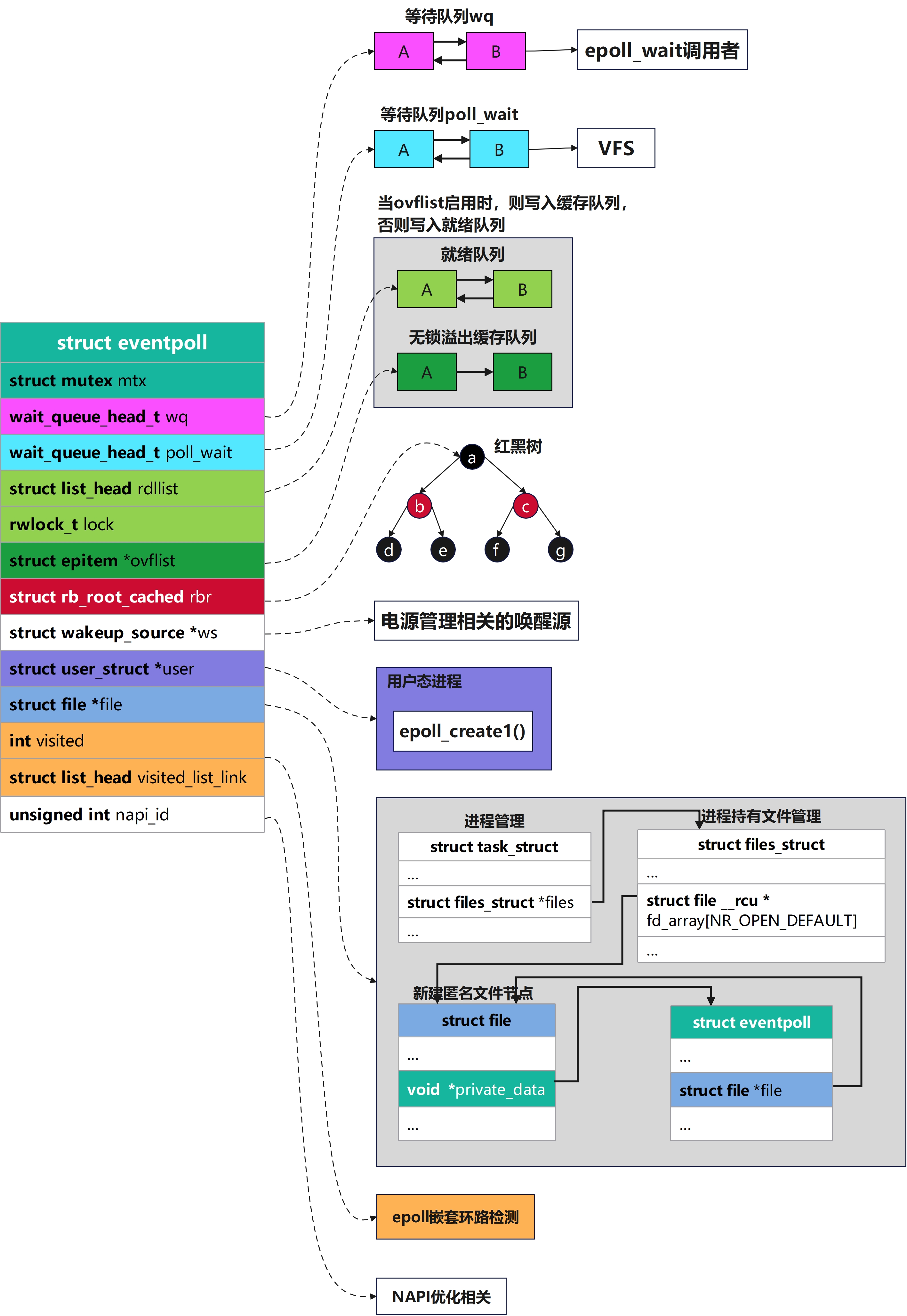
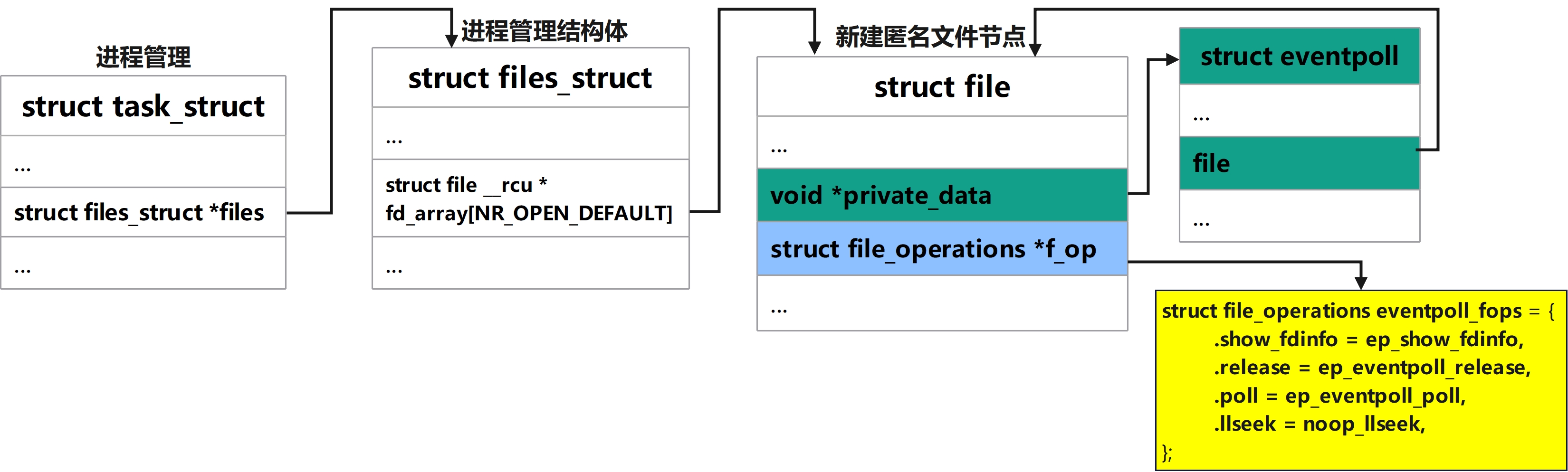
这个数据结构是我们在调用epoll_create之后内核侧创建的一个句柄,表示了一个epoll实例。后续如果我们再调用epoll_ctl和epoll_wait等,都是对这个eventpoll数据进行操作,这部分数据会被保存在do_epoll_create创建的匿名文件file的private_data字段中
笔者注:除注释外,所有代码均未删改
c
// linux-5.4/fs/eventpoll.c
/*
* Each file descriptor added to the eventpoll interface will
* have an entry of this type linked to the "rbr" RB tree.
* Avoid increasing the size of this struct, there can be many thousands
* of these on a server and we do not want this to take another cache line.
*/
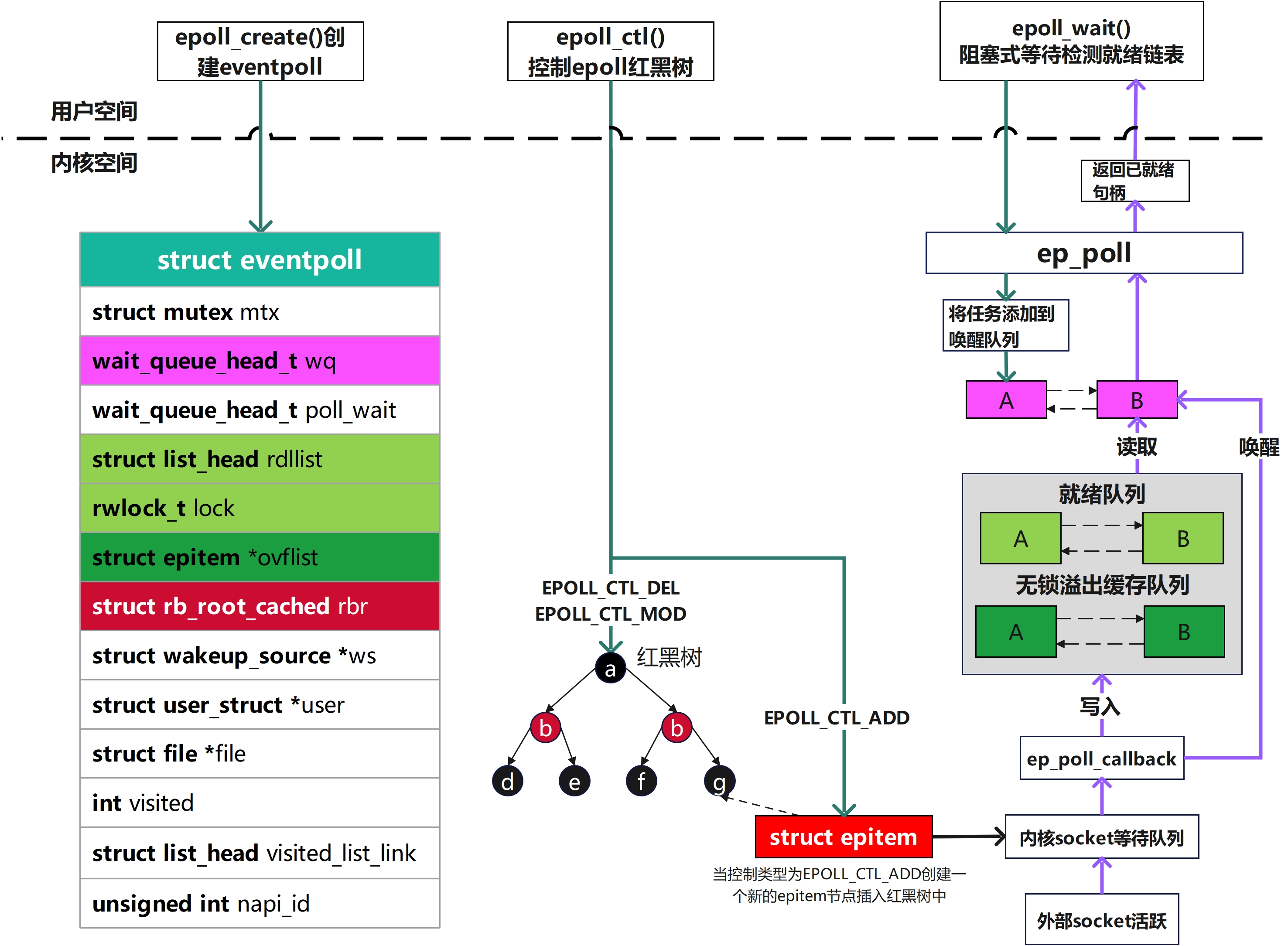
struct eventpoll {
/**
* ep->mtx保护的是这个eventpoll实例在逻辑上的完整性与生命周期相关操作
* 谁在集合里、epitem怎么挂/拆、和底层file的关联何时失效------本质上就是ep状态机不要被epoll_wait/epoll_ctl/close等路径打乱
*/
struct mutex mtx;
/**
* 等待队列,执行epoll_Wait加入等待队列
* epoll_wait()里阻塞的进程挂在这个等待队列上
* 有就绪事件或需要唤醒等待者时,会wake_up这里
*/
wait_queue_head_t wq;
/**
* 等待队列的file->poll()
* 这个队列里存放的是该eventloop作为poll对象的一个实例,加入到等待的队列
* 这是因为eventpoll本身也是一个file, 所以也会有poll操作
*/
wait_queue_head_t poll_wait;
/* 就绪链表 */
struct list_head rdllist;
/* 用于rdllist和ovflist的读写锁 */
rwlock_t lock;
/* 指向被检视对象存储的红黑树 */
struct rb_root_cached rbr;
/**
* 当向用户空间拷贝就绪事件的过程中,有时候不能持有->lock锁,就会将事件放在这里
* 之后添加到正式的就绪队列中
*/
struct epitem *ovflist;
/* 电源管理相关唤醒源 */
struct wakeup_source *ws;
/* 创建eventpoll描述符的用户 */
struct user_struct *user;
/**
* epoll fd自身对应的struct file
* 便于从eventpoll反查VFS层文件、与 f_op、引用计数等衔接
*/
struct file *file;
/* 用于检测是否有嵌套调用造成环路 */
int visited;
struct list_head visited_list_link;
/**
* 在开启网络RX busy polling时
* 用于跟踪与NAPI(网络中断缓解接口)相关的 napi_id
* 使epoll路径能与网卡侧的busy poll优化协作
*/
unsigned int napi_id;
};核心思想
struct eventpoll 是每个epoll实例 的核心上下文,创建 epoll_create*时分配,挂在对应struct file的private_data上
mtx互斥锁确保epoll整体逻辑的完整,lock确保rdllist队列和ovflist队列读写安全
wp队列和poll_wait队列都是内核等待队列,wp队列向用户态epoll_wait调用者提供。poll_wait队列则是当向VFS系统提供的,当别的代码对这个epoll的file做 poll/select时用的等待队列
1) wq队列
wq队列是面向用户态的epoll_wait的调用者提供
仅在ep_poll函数中使用
在这些场景中会使用来wake_up(&ep->wq)唤醒等待者
- 监听句柄活跃,触发
ep_poll_callback ep_scan_ready_list中刷新完就绪队列后,检查一次,如果有就绪事件,把它推进rdllist并唤醒等待者ep_insert中插入节点后,立刻检查一次,如果有就绪事件,把它推进rdllist并唤醒等待者ep_modify修改了某个已注册fd的epoll_event之后,立刻检查一次,如果有就绪事件,把它推进rdllist并唤醒等待者
2) poll_wait队列
epoll_create创建的epoll实例本身,也可以被当做一个句柄来监听,poll_wait队列就是应对这种情况使用的
在这些场景中会使用poll_wait()函数来向poll_wait队列中添加成员
-
ep_item_poll函数对epitem节点,所对应的file做一次与poll等价语义的探测这时会检测探测的是否是
epoll文件,如果是则使用poll_wait()函数将自身添加到poll_wait队列中。这里外层epoll在等待的并不是内层epoll文件的某个设备队列本身,而是内层struct eventpoll的等待队列头poll_wait;这样嵌套epoll才能像普通fd一样被poll驱动 -
epoll模块对VFS提供的poll接口回调函数ep_eventpoll_poll中这里将等待者挂在
epoll的等待队列中,是一个常规操作,是poll接口实现非常常见的一种做法
这二者的区别是一个是通过epoll_ctl接口将待检测的句柄传入内核,在epoll流程中的ep_item_poll函数会检测事件活跃。另一个使用直接使用epoll在VFS中注册的poll接口
在这些场景中会使用来ep_poll_safewake(&ep->poll_wait)唤醒等待者
- 监听句柄活跃,触发
ep_poll_callback ep_scan_ready_list中刷新完就绪队列后,检查一次,如果有就绪事件,把它推进rdllist并唤醒等待者ep_insert中插入节点后,立刻检查一次,如果有就绪事件,把它推进rdllist并唤醒等待者ep_modify修改了某个已注册fd的epoll_event之后,立刻检查一次,如果有就绪事件,把它推进rdllist并唤醒等待者ep_free函数
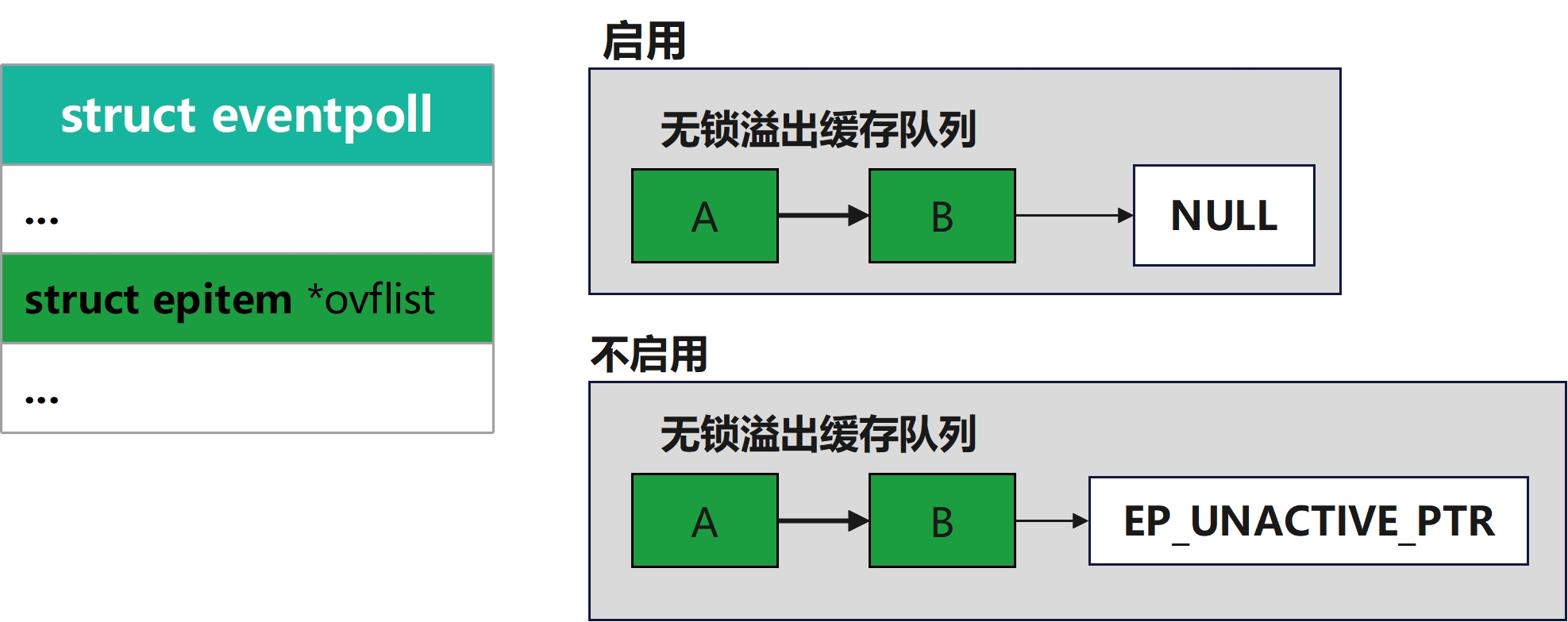
3) ovflist队列的启用
ovflist在初始化和不被启用时会被指向EP_UNACTIVE_PTR这个特殊值,在ep_scan_ready_list函数中对rdllist操作时,这时不能写入rdllist。就会先将ovflist指向NULL,这时后续活跃的句柄就会写入ovflist而不是rdllist
2. struct epitem
每当我们调用epoll_ctl增加一个fd时,内核就会为我们创建出一个epitem实例,并且把这个实例作为红黑树的一个子节点,增加到eventpoll结构体中的红黑树中,对应的字段是rbr。这之后,查找每一个fd上是否有事件发生都是通过红黑树上的epitem来操作
笔者注:除注释外,所有代码均未删改
c
// linux-5.4/fs/eventpoll.c
/*
* Each file descriptor added to the eventpoll interface will
* have an entry of this type linked to the "rbr" RB tree.
* Avoid increasing the size of this struct, there can be many thousands
* of these on a server and we do not want this to take another cache line.
*/
struct epitem {
union {
/* 红黑树节点将此结构链接到eventpoll红黑树 */
struct rb_node rbn;
/* RCU头部,用于释放struct epitem */
struct rcu_head rcu;
};
/**
* 这里使用内核公共的双向链表结构便于降低修改时的开销,实际上这只是一个节点指针,而不是整条链表
* 用于将此结构体链接到eventpoll->rdllist就绪列表的列表头
*/
struct list_head rdllink;
/* 协同struct eventpoll结构体中的ovflist字段,共同维护这个单链表链 */
struct epitem *next;
/* 被监视的struct file *和int fd */
struct epoll_filefd ffd;
/* 表示当前挂着的活跃等待队列项数量,用于注册/注销 pollwait 时维护 */
int nwait;
/**
* 每个被poll的文件可能有多处wait queue head。epoll通过 struct eppoll_entry把自己挂到目标文件的poll等待队列上
* 这些eppoll_entry通过llink挂在epi->pwqlist上
*/
struct list_head pwqlist;
/* 当前epollitem所属的eventpoll */
struct eventpoll *ep;
/* 列表头文件,用于将该项链接到"struct file"的项列表 */
struct list_head fllink;
/* 设置EPOLLWAKEUP标志时使用的唤醒源,电源管理使用 */
struct wakeup_source __rcu *ws;
/* 用户传入的兴趣位(events mask)以及data */
struct epoll_event event;
};核心思想
struct epitem结构体是用来管理epoll_ctl监听的实例的数据结构,struct epitem结构体可能同时存在数百万个 ,为了增加管理效率使用了红黑树来管理。这个结构体被设计的尽可能少的占用内容,同时使用union和__packed来进一步优化
需要特别关注的是pwqlist存储等待队列相关信息,event存储用户传入待监听的句柄的数据
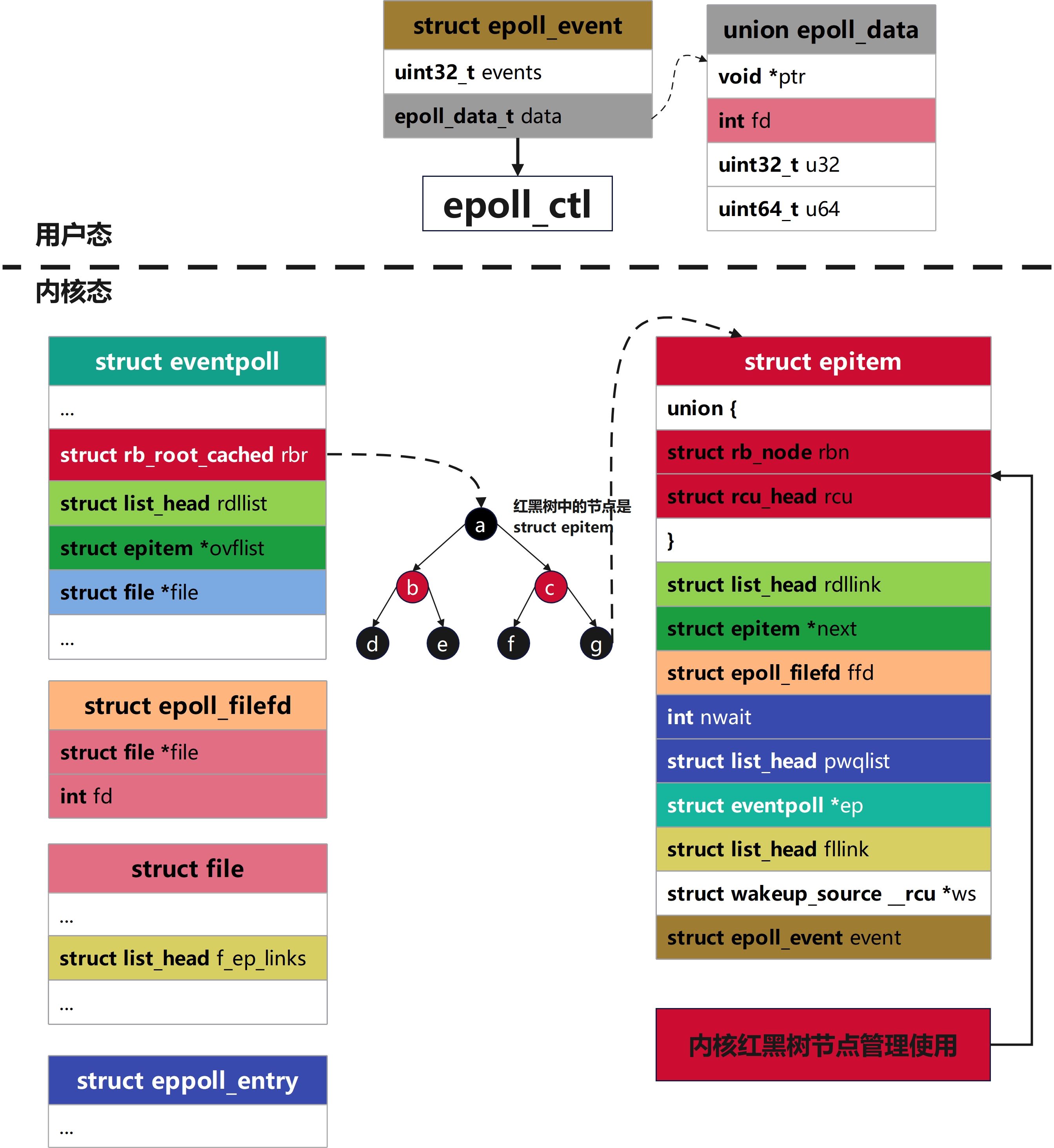
1) epitem->ffd->file和eventpoll->file
epitem->ffd->file和eventpoll->file都是struct file *类型的数据,但是二者指向不同内存地址
**epitem->ffd->file:**指向的是用户监听的句柄对应fille,是通过fdget(fd)查找的
**eventpoll->file:**指向的是当前epoll描述符对应的eventpoll文件
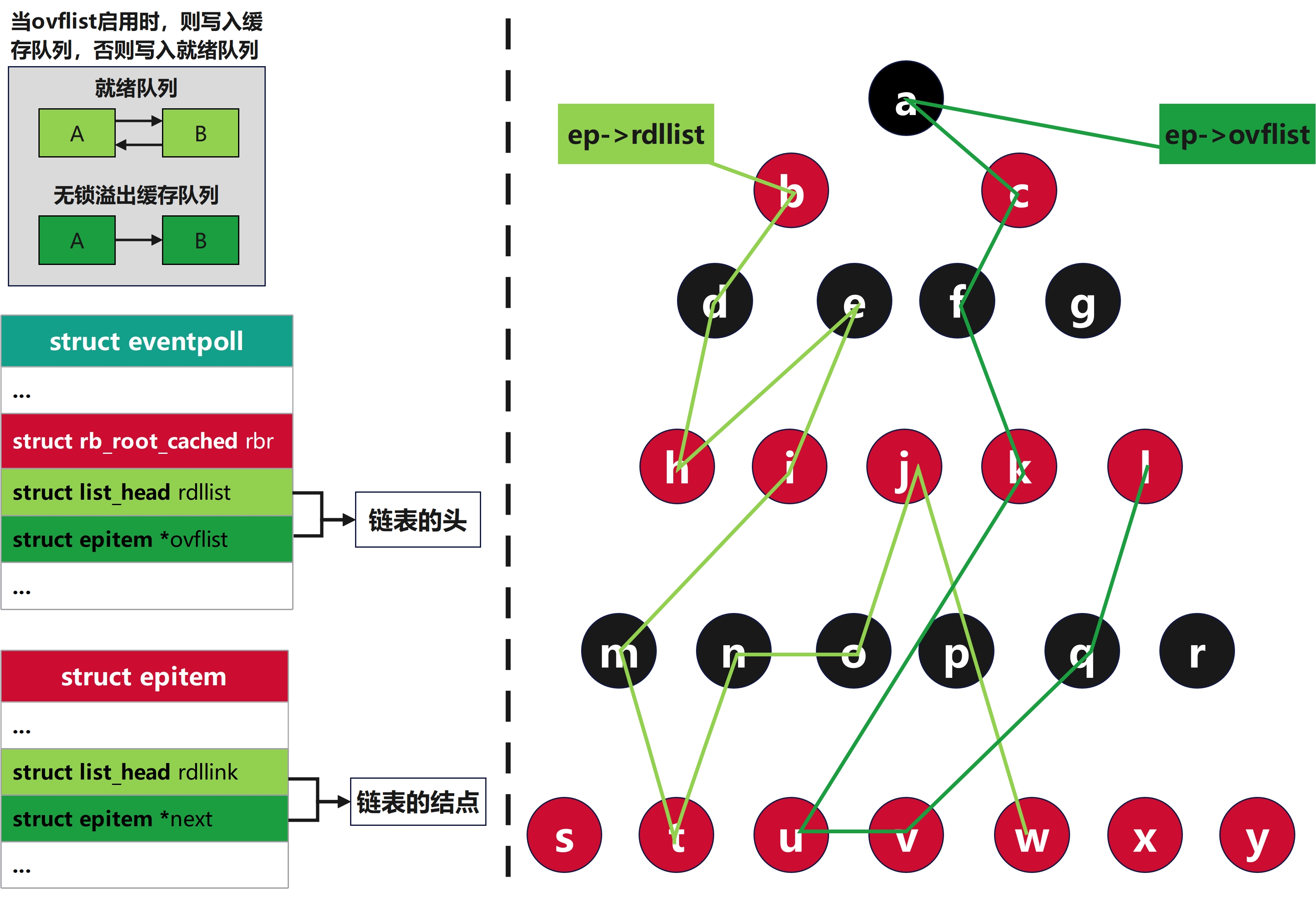
2) rdllist & rdllink和ovflist & next双链表
rdllist & rdllink对应epoll中的就绪列表,ovflist & next对应的则是epoll中的无锁缓存溢出链表
struct epitem中存储的是链表的节点,链表真正的头在struct eventpoll中
在用户调用epoll_ctl(EPOLL_CTL_ADD)时就会将struct epoll_event类型的结构传入内核,epoll模块会将它放在红黑树中管理存储,并且将ep_poll_callback注册在监听的句柄资源的唤醒队列中,当有句柄活跃就会触发回调。ep_poll_callback中会把活跃的句柄对应的红黑树节点,添加在合适的队列尾部
这种活跃是不可预测随机的,所以红黑树中任何一个节点有对应的句柄都可能在下一刻活跃,链表会像两条线一样在树中串联其中的节点
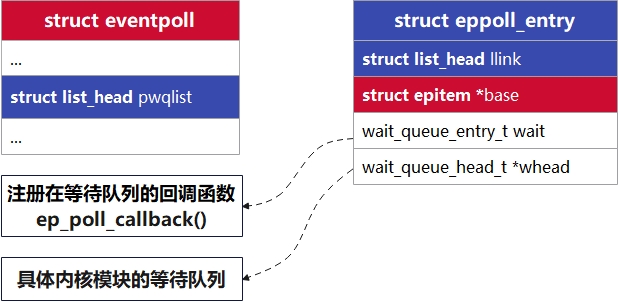
3. struct eppoll_entry
每次当一个fd关联到一个epoll实例,就会有一个eppoll_entry产生,用于轮询钩子使用的等待结构
笔者注:除注释外,所有代码均未删改
c
// linux-5.4/fs/eventpoll.c
/* Wait structure used by the poll hooks */
struct eppoll_entry
{
/* 把本eppoll_entry串进所属epitem的pwqlist */
struct list_head llink;
/* 所属epitem结构体的地址 */
struct epitem *base;
/* 真正挂在驱动/子系统 whead 上的等待队列项;其唤醒函数被设为 ep_poll_callback */
wait_queue_entry_t wait;
/* 记录 wait 被加到了哪个 wait_queue_head_t */
wait_queue_head_t *whead;
};
六、epoll基本流程
1. epoll基本流程图
2. 创建epoll实例
内核对于新建一个epoll实例提供了两个外部接口
epoll_create接口已废弃 ,epoll_create1接口参数通常使用0,也可使用EPOLL_CLOEXEC为新的文件描述符设置"执行时关闭"标志(FD_CLOEXEC)
笔者注:除注释外,所有代码均未删改
c
// linux/linux-5.4/fs/eventpoll.c
SYSCALL_DEFINE1(epoll_create1, int, flags)
{
return do_epoll_create(flags);
}
// linux/linux-5.4/fs/eventpoll.c:已废弃
SYSCALL_DEFINE1(epoll_create, int, size)
{
if (size <= 0)
return -EINVAL;
return do_epoll_create(0);
}do_epoll_create函数
创建新的epoll节点
核心逻辑如下
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c
// linux-5.4/fs/anon_inodes.c
/**
* anon_inode_getfile-通过连接一个匿名inode和一个描述文件"类"的dentry来创建一个新的文件实例
* @name:新文件的"类"的名称
* @fops:文件操作的新文件
* @priv:新文件的私有数据(将是文件的private_data)
* @flags:打开文件的行为和属性
*
* 通过将一个文件挂接在单个索引节点上来创建一个新文件。这对于不需要完整inode就可以正确操作的文件很有用。
* 使用anon_inode_getfile()创建的所有文件将共享一个inode,从而节省内存并避免文件/inode/dentry设置的代码重复。返回新创建的文件*或错误指针。
*/
struct file *anon_inode_getfile(const char *name, const struct file_operations *fops, void *priv, int flags);
// linux-5.4/fs/eventpoll.c
/* File callbacks that implement the eventpoll file behaviour */
static const struct file_operations eventpoll_fops = {
.show_fdinfo = ep_show_fdinfo,
.release = ep_eventpoll_release,
.poll = ep_eventpoll_poll,
.llseek = noop_llseek,
};
// linux-5.4/fs/eventpoll.c
static int ep_alloc(struct eventpoll **pep)
{
struct user_struct *user;
struct eventpoll *ep;
/* 返回当前进程的用户ID */
user = get_current_user();
ep = kzalloc(sizeof(*ep), GFP_KERNEL);
/* 初始化互斥锁 */
mutex_init(&ep->mtx);
/* 初始化读写锁 */
rwlock_init(&ep->lock);
init_waitqueue_head(&ep->wq);
init_waitqueue_head(&ep->poll_wait);
INIT_LIST_HEAD(&ep->rdllist);
ep->rbr = RB_ROOT_CACHED;
ep->ovflist = EP_UNACTIVE_PTR;
ep->user = user;
*pep = ep;
return 0;
}
static int do_epoll_create(int flags)
{
int error, fd;
struct eventpoll *ep = NULL;
struct file *file;
ep_alloc(&ep);
/* 获取一个可读可写的未被使用的文件描述符 */
fd = get_unused_fd_flags(O_RDWR | (flags & O_CLOEXEC));
/* 创建一个匿名的inode节点 */
file = anon_inode_getfile("[eventpoll]", &eventpoll_fops, ep, O_RDWR | (flags & O_CLOEXEC));
/* 将这个新的file注册到对应的eventpoll中 */
ep->file = file;
/* 把file指针写进当前进程fd对应槽位 */
fd_install(fd, file);
return fd;
}核心思想
-
创建inode节点
创建一个匿名的
inode节点,这个文件对象通常不对应于实际的文件系统中的任何文件,因此被称为匿名inode。它被用作epoll实例的文件描述符,通过这个文件描述符,用户空间程序可以对epoll实例进行I/O操作。并返回与之关联的文件描述符 -
使用anon_inode_getfile创建匿名inode节点,此处不详细展开实现代码,仅列出函数调用栈
c/* 创建一个新的匿名inode */ ->anon_inode_getfile(const char *name, const struct file_operations *fops, void *priv, int flags) /* 基于伪文件系统 anon_inode_mnt(匿名 inode 挂载点)+ 共享 inode 分配一个新的 struct file */ ->alloc_file_pseudo(struct inode *inode, struct vfsmount *mnt, const char *name, int flags, const struct file_operations *fops) /* 将新建的file->f_op赋值为入参eventpoll_fops */ ->alloc_file(const struct path *path, int flags, const struct file_operations *fop) /* 创建一个空的file对象,设置被创建文件的状态和属性为flags */ ->alloc_empty_file(int flags, const struct cred *cred) /* 将新建的file->private_data赋值为priv */ ->file->private_data = priv -
使用fd_install将新创建的inode节点插入当前进程的文件数组中
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
C// linux-5.4/fs/file.c void fd_install(unsigned int fd, struct file *file) { /* current->files是指向当前进程文件描述符表的指针 */ __fd_install(current->files, fd, file); } /** * fd:文件描述符 * file:新建的inode节点 * struct fdtable:内核中用来管理文件描述符的数据结构 * fdt->fd:存储file结构体的数组: */ void __fd_install(struct files_struct *files, unsigned int fd, struct file *file) { struct fdtable *fdt; fdt = files_fdtable(files); rcu_assign_pointer(fdt->fd[fd], file); }
此处将新建的file节点插入,对应当前的进程文件数组中,用于后续内核管理
3. 修改监听句柄
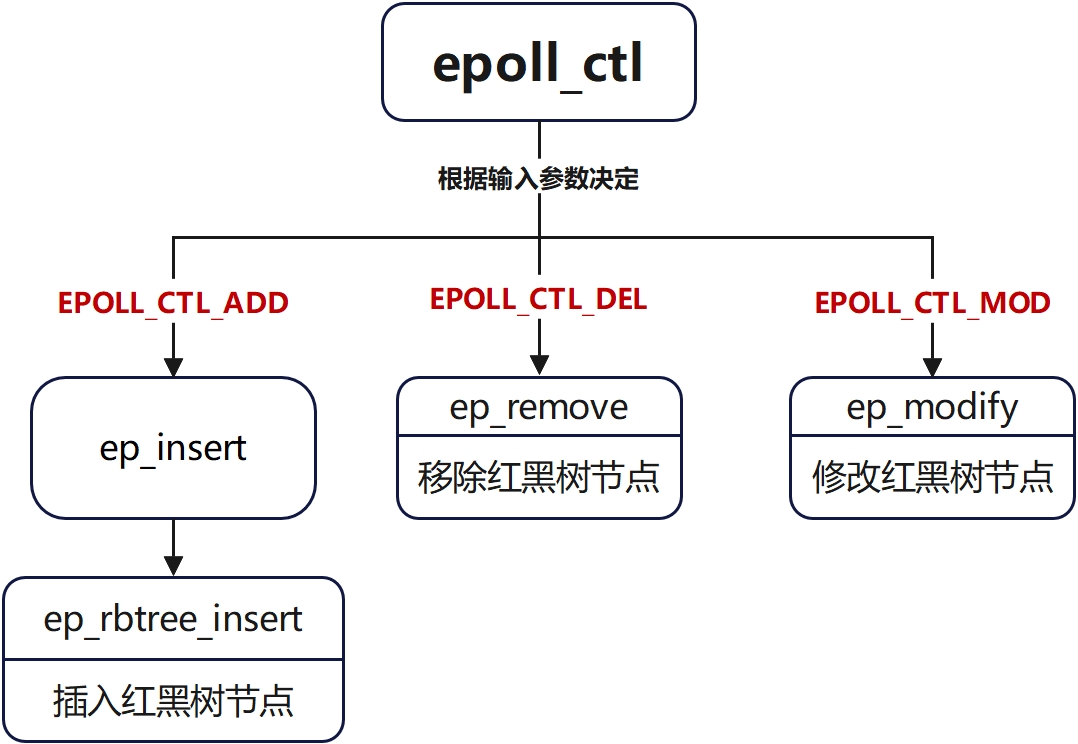
epoll_ctl函数
用于向epoll实例中添加、修改或删除 感兴趣的文件描述符(socket、文件等)及其关注的事件
核心逻辑如下
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c
// linux-5.4/fs/eventpoll.c
/*
* @epfd: epool_create创建的用于eventpoll的fd
* @op: 控制的命令类型
* EPOLL_CTL_ADD:添加一个新的文件描述符和其关注的事件到 epoll 实例中。
* EPOLL_CTL_MOD:修改一个已经存在的文件描述符关注的事件。
* EPOLL_CTL_DEL:从 epoll 实例中删除一个文件描述符。
*
* @fd: 要操作的文件描述符
* @event:与fd相关的对象,描述了要添加、修改或删除的事件。
*/
SYSCALL_DEFINE4(epoll_ctl, int, epfd, int, op, int, fd,
struct epoll_event __user *, event)
{
int error;
struct fd f, tf;
struct eventpoll *ep;
struct epitem *epi;
struct epoll_event epds;
struct eventpoll *tep = NULL;
error = -EFAULT;
/* 从用户空间获取epoll_event结构体数据 */
copy_from_user(&epds, event, sizeof(struct epoll_event));
/* 获取epoll_create1创建的epoll_event实例对应struct file *结构体 */
f = fdget(epfd);
/* 获取要监听的句柄对应的struct file *结构体 */
tf = fdget(fd);
/* 不允许自己监听自己,同时检查tf.file和f.file是否支持poll操作 */
if (f.file == tf.file || !is_file_epoll(f.file) || !file_can_poll(tf.file))
goto error_tgt_fput;
ep = f.file->private_data;
/**
* 笔者注:此处极大省略,只保留核心逻辑
* 检查是否存在
* 1. 多层嵌套epoll
* 2. 多进程的epoll监听之间是否存在环路
* 3. 过深的wakeup路径
*/
if (ep_loop_check(ep, tf.file) != 0) {
clear_tfile_check_list();
goto error_tgt_fput;
}
/* 在红黑树中查找要监听的文件描述符对应的epitem结构体,如果存在则返回指向该结构体的指针,否则返回NULL */
epi = ep_find(ep, tf.file, fd);
error = -EINVAL;
switch (op) {
case EPOLL_CTL_ADD:
if (!epi) {
epds.events |= EPOLLERR | EPOLLHUP;
error = ep_insert(ep, &epds, tf.file, fd);
} else
error = -EEXIST;
break;
case EPOLL_CTL_DEL:
if (epi)
error = ep_remove(ep, epi);
else
error = -ENOENT;
break;
case EPOLL_CTL_MOD:
if (epi) {
if (!(epi->event.events & EPOLLEXCLUSIVE)) {
epds.events |= EPOLLERR | EPOLLHUP;
error = ep_modify(ep, epi, &epds);
}
} else
error = -ENOENT;
break;
}
error_tgt_fput:
fdput(tf);
fdput(f);
return error;
}核心思想
epoll_ctl接口从用户态传入的配置好的struct epoll_event结构体和对应的epoll_create1创建的epoll_event实例
- 通过
fdget接口获取句柄对应的进程描述符struct file,检查了是否支持poll操作 - 检查是否存在嵌套
epoll、多进程之间是否存在环路、过深的wakeup路径等情况 - 是否在红黑树上已存在
- 按照操作类型进行对应的增删改操作
4. 等待句柄活跃
epoll_wait函数
epoll_ctl(EPOLL_CTL_ADD)已经将句柄添加到内核的等待队列中了,epoll_wait则用户态是获取句柄活跃时的通知
核心逻辑如下
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c
// linux-5.4/fs/eventpoll.c
SYSCALL_DEFINE4(epoll_wait, int, epfd, struct epoll_event __user *, events,
int, maxevents, int, timeout)
{
return do_epoll_wait(epfd, events, maxevents, timeout);
}
static int do_epoll_wait(int epfd, struct epoll_event __user *events,
int maxevents, int timeout)
{
int error;
struct fd f;
struct eventpoll *ep;
f = fdget(epfd);
ep = f.file->private_data;
error = ep_poll(ep, events, maxevents, timeout);
fdput(f);
return error;
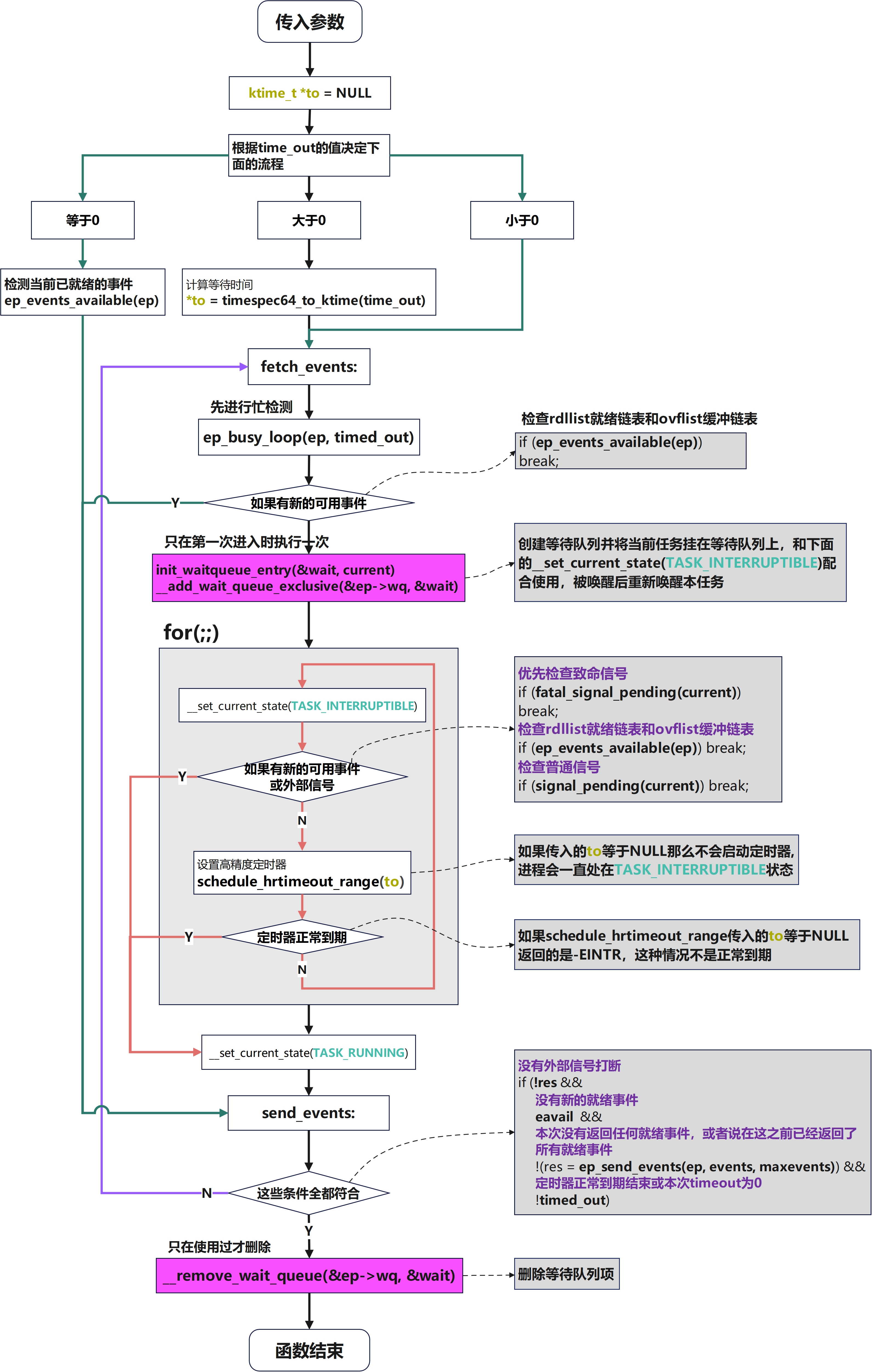
}ep_poll函数
这个函数真正将执行epoll_wait的进程带入睡眠状态
核心逻辑如下
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c
// linux-5.4/fs/eventpoll.c
/*
* ep_poll - 检索准备好的事件,并将它们传递到调用者提供的事件缓冲区
*
* @ep: 指向eventpoll上下文的指针
* @events: 指向用户空间缓冲区的指针,准备好的事件应该存储在这里
* @maxevents: 调用者事件缓冲区的大小(以事件数量表示)
* @timeout: 准备事件获取操作的最大超时时间,单位为毫秒。如果@timeout为零,则该函数不会阻塞
* 而如果@timeout小于零,则该函数将阻塞,直到至少检索到一个事件(或发生错误)
* @return: 返回已获取的就绪事件的数量,或者在出现错误时返回错误代码。
*/
static int ep_poll(struct eventpoll *ep, struct epoll_event __user *events,
int maxevents, long timeout)
{
int res = 0, eavail, timed_out = 0;
u64 slack = 0;
bool waiter = false;
wait_queue_entry_t wait;
ktime_t expires, *to = NULL;
lockdep_assert_irqs_enabled();
/* 时间大于0则计算等待时间 */
if (timeout > 0) {
slack = select_estimate_accuracy(&end_time);
*to = timespec64_to_ktime(end_time);
/* 时间小于0则这一次直接跳过等待过程 */
} else if (timeout == 0) {
timed_out = 1;
/* 检查当前就绪事件 */
eavail = ep_events_available(ep);
goto send_events;
}
fetch_events:
/* 先执行忙等待 */
if (!ep_events_available(ep))
ep_busy_loop(ep, timed_out);
/* 检查当前就绪事件,如果有则直接返回就绪事件 */
if (ep_events_available(ep))
goto send_events;
if (!waiter) {
waiter = true;
/* 初始化本线程等待队列,把本线程登记到epoll的waitqueue */
init_waitqueue_entry(&wait, current);
__add_wait_queue_exclusive(&ep->wq, &wait);
}
for (;;) {
/* 将进程设置为可中断睡眠态 */
set_current_state(TASK_INTERRUPTIBLE);
/* 先检查致命信号,如果有则直接返回错误 */
if (fatal_signal_pending(current)) {
res = -EINTR;
break;
}
/* 再检查就绪事件,如果有则直接返回就绪事件 */
eavail = ep_events_available(ep);
if (eavail)
break;
/* 最后检查普通信号,如果有则直接返回错误 */
if (signal_pending(current)) {
res = -EINTR;
break;
}
/* 如果有等待时间则继续等待,否则直接返回超时 */
if (!schedule_hrtimeout_range(to, slack, HRTIMER_MODE_ABS)) {
timed_out = 1;
break;
}
}
/* 将进程状态设置为运行态 */
__set_current_state(TASK_RUNNING);
send_events:
/**
* Try to transfer events to user space. In case we get 0 events and
* there's still timeout left over, we go trying again in search of
* more luck.
*
* 尽力将事件转移到用户空间。倘若我们获取到的事件数为 0,而剩余的超时时间仍有剩余的话,我们就继续尝试,希望能获得更多的机会。
*/
if (!res && eavail &&
!(res = ep_send_events(ep, events, maxevents)) && !timed_out)
goto fetch_events;
/* 如果之前登记了等待队列,则将本线程从epoll的waitqueue中移除 */
if (waiter) {
__remove_wait_queue(&ep->wq, &wait);
}
return res;
}核心思想
ep_poll函数对用户态提供了灵活的接口,自身在高并发的场景下也有专门的优化处理,有四种理解角度
-
time_out小于0时,一直阻塞接口直到监听的句柄有任何一个活跃 -
time_out等于0时,跳过中间流程只做查询动作,这时用户态就是只做查询而不会阻塞接口 -
time_out大于0时,监听一个永远不会活跃的句柄,这时用户态会一直阻塞在epoll_wait接口time_out时间,并且不会占用CPU资源 -
time_out大于0时,监听一个普通句柄的常规流程 -
极高并发下,退化成忙检测的状态
在极高的并发下可以认为,
ep_busy_loop永远会查询到新的就绪事件,会直接goto到send_events最后。同时永远也不可能发送完所有的事件,又会跳转回fetch_events,重复这轮循环。这种设计只在一个函数内部,不依赖复杂的状态机。在高并发下由于只执行了很少的代码,会节约大量的CPU资源,在第并发时又会自动切换回正常流程,设计极为精妙
最终检测就绪事件,发送就绪事件到用户态,这部分的具体实现见下文
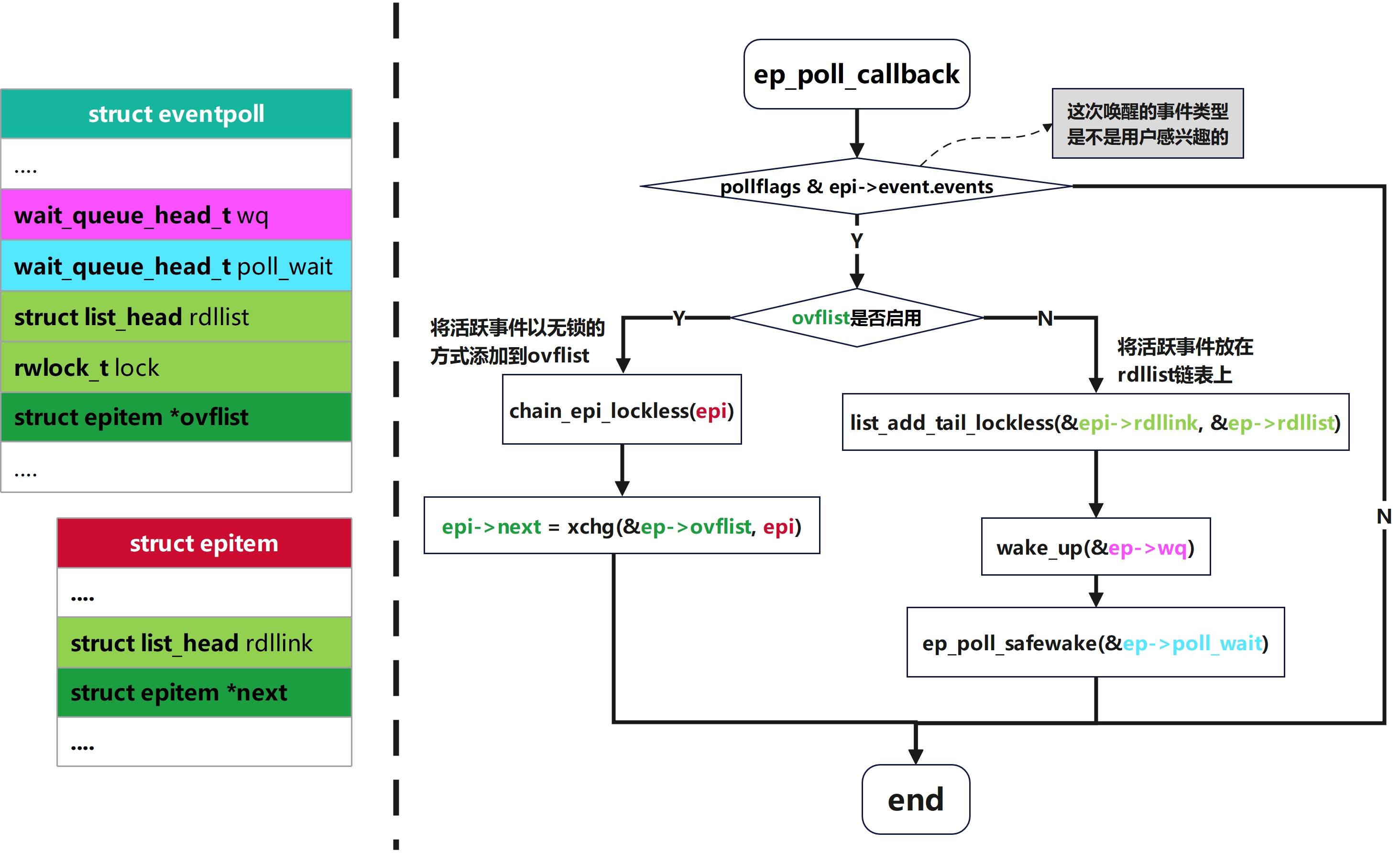
5. 监听句柄活跃触发回调ep_poll_callback
外部socket活跃
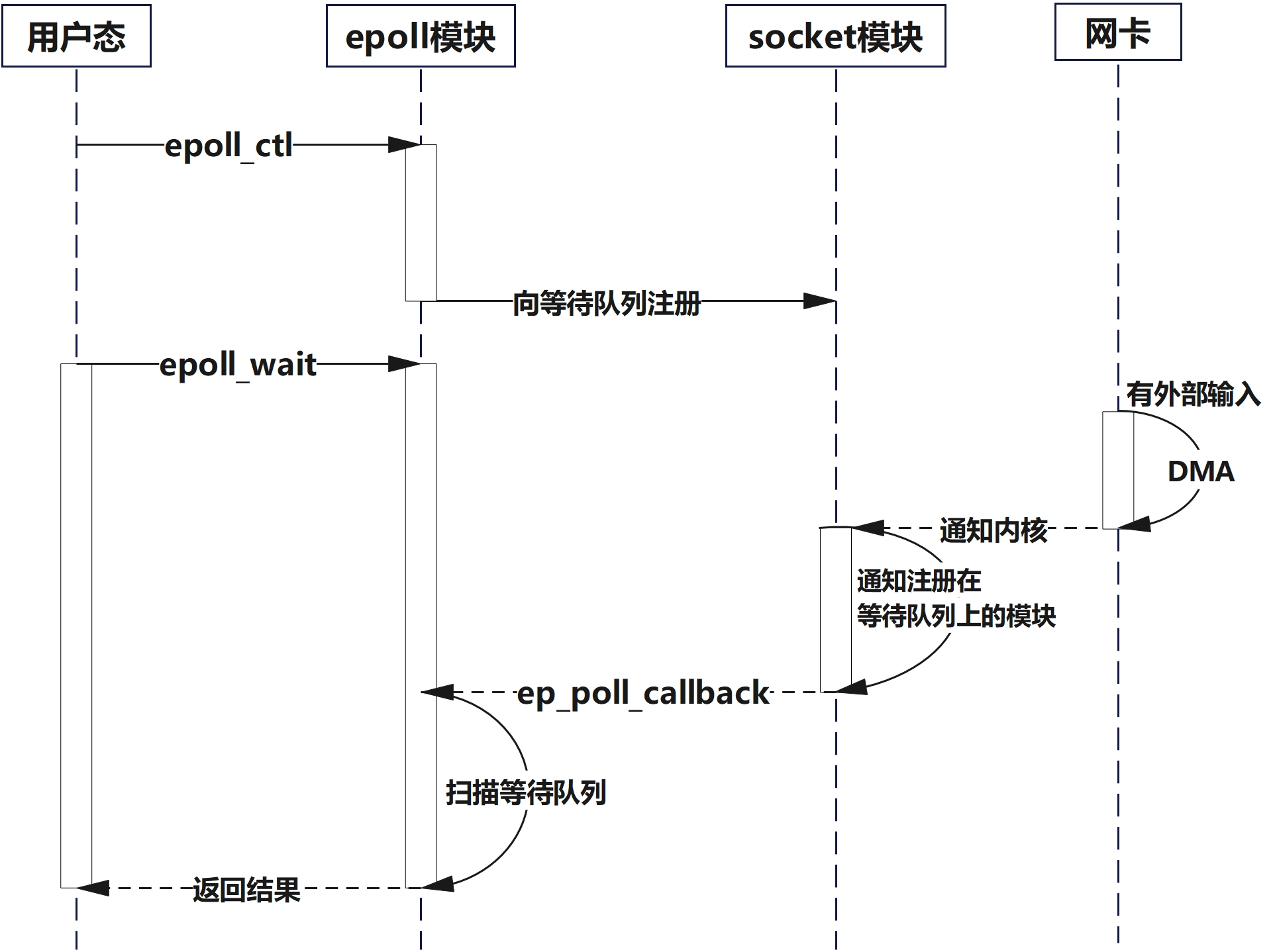
ep_poll_callback函数
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c++
// linux-5.4/fs/eventpoll.c
static int ep_poll_callback(wait_queue_entry_t *wait, unsigned mode, int sync, void *key)
{
int pwake = 0;
struct epitem *epi = ep_item_from_wait(wait);
struct eventpoll *ep = epi->ep;
/* 本次唤醒携带的就绪事件位,例如 POLLIN、POLLOUT、POLLERR等,也就是底层这次认为发生了哪些poll语义上的事件 */
__poll_t pollflags = key_to_poll(key);
unsigned long flags;
int ewake = 0;
read_lock_irqsave(&ep->lock, flags);
/* 和用户注册的兴趣做交集过滤,如果没有用户感兴趣的事件发生,则不唤醒用户空间的线程 */
if (pollflags && !(pollflags & epi->event.events))
goto out_unlock;
/**
* 当正在把就绪事件从内核交给用户态的那段时间里的那段时间里
* 新来的I/O就绪不能再去动rdllist,只能先挂到ovflist上
*/
if (READ_ONCE(ep->ovflist) != EP_UNACTIVE_PTR) {
if (epi->next == EP_UNACTIVE_PTR &&
chain_epi_lockless(epi))
/* 向内核电源管理子系统登记,防止休眠 */
ep_pm_stay_awake_rcu(epi);
goto out_unlock;
}
if (!ep_is_linked(epi) &&
list_add_tail_lockless(&epi->rdllink, &ep->rdllist)) {
/* 向内核电源管理子系统登记,防止休眠 */
ep_pm_stay_awake_rcu(epi);
}
/* 如果处于激活状态,同时唤醒事件轮询等待列表和->poll()方法的等待列表 */
if (waitqueue_active(&ep->wq)) {
wake_up(&ep->wq);
}
if (waitqueue_active(&ep->poll_wait))
pwake++;
out_unlock:
read_unlock_irqrestore(&ep->lock, flags);
if (pwake)
ep_poll_safewake(&ep->poll_wait);
if (!(epi->event.events & EPOLLEXCLUSIVE))
ewake = 1;
if (pollflags & POLLFREE) {
list_del_init(&wait->entry);
smp_store_release(&ep_pwq_from_wait(wait)->whead, NULL);
}
return ewake;
}核心思想
根据ovflist的状态,将新活跃的事件添加到就绪队列或者缓存队列中
6. 扫描就绪链表
ep_send_events函数
笔者注:除注释外,所有代码均未删改
c
// linux-5.4/fs/eventpoll.c
static int ep_send_events(struct eventpoll *ep,
struct epoll_event __user *events, int maxevents)
{
struct ep_send_events_data esed;
esed.maxevents = maxevents;
esed.events = events;
/* 扫描就绪队列 */
ep_scan_ready_list(ep, ep_send_events_proc, &esed, 0, false);
return esed.res;
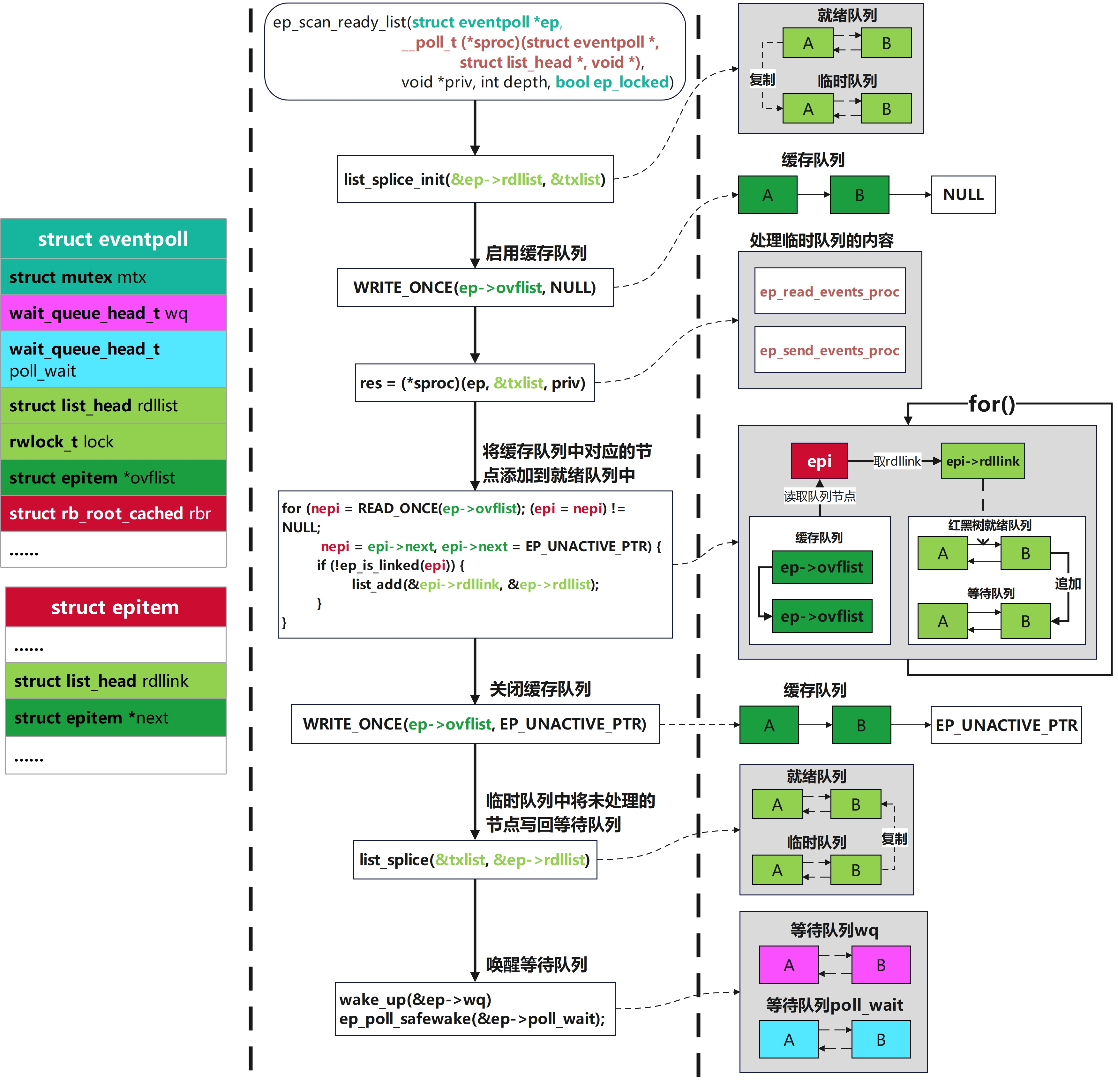
}ep_scan_ready_list函数
ep_scan_ready_list函数在epoll流程中功能及重要且复杂,这里保留完整注释和源码,方便读者阅读理解
笔者注:除注释外,所有代码均未删改
c
// linux-5.4/fs/eventpoll.c
/**
* ep_scan_ready_list - Scans the ready list in a way that makes possible for
* the scan code, to call f_op->poll(). Also allows for
* O(NumReady) performance.
*
* @ep: Pointer to the epoll private data structure.
* @sproc: Pointer to the scan callback.
* @priv: Private opaque data passed to the @sproc callback.
* @depth: The current depth of recursive f_op->poll calls.
* @ep_locked: caller already holds ep->mtx
*
* Returns: The same integer error code returned by the @sproc callback.
*
* ep_scan_ready_list - 以一种能够使扫描代码调用 f_op->poll() 的方式扫描就绪列表。同时还能实现 O(NumReady) 的性能
* @ep:指向 epoll 私有数据结构的指针
* @sproc:指向扫描回调函数的指针
* @priv:传递给 @sproc 回调函数的私有不透明数据
* @depth:递归调用 f_op->poll 的当前深度
* @ep_locked:调用者是否已经持有ep->mtx锁
*
* 返回值:与 @sproc 回调所返回的相同整数错误代码
*/
static __poll_t ep_scan_ready_list(struct eventpoll *ep,
__poll_t (*sproc)(struct eventpoll *,
struct list_head *, void *),
void *priv, int depth, bool ep_locked)
{
__poll_t res;
int pwake = 0;
struct epitem *epi, *nepi;
LIST_HEAD(txlist);
lockdep_assert_irqs_enabled();
/**
* We need to lock this because we could be hit by
* eventpoll_release_file() and epoll_ctl().
*
* 这里需要锁定这个,因为可能会受到
* eventpoll_release_file()和epoll_ctl()的影响
*/
if (!ep_locked)
mutex_lock_nested(&ep->mtx, depth);
/**
* Steal the ready list, and re-init the original one to the
* empty list. Also, set ep->ovflist to NULL so that events
* happening while looping w/out locks, are not lost. We cannot
* have the poll callback to queue directly on ep->rdllist,
* because we want the "sproc" callback to be able to do it
* in a lockless way.
*
* 窃取就绪列表,并将原始列表重新初始化为空列表
* 同时,将ep->ovflist设置为NULL,这样在无锁循环期间发生的事件就不会丢失
* 不能让轮询(poll)回调直接排队到ep->rdllist上,因为我们希望特殊处理(sproc)回调能够以无锁的方式执行此操作
*/
write_lock_irq(&ep->lock);
/* 将就绪列表复制到临时列表 */
list_splice_init(&ep->rdllist, &txlist);
/* 将缓冲链表ep->ovflist设置为NULL */
WRITE_ONCE(ep->ovflist, NULL);
write_unlock_irq(&ep->lock);
/**
* Now call the callback function.
*
* 在没有锁的情况下调用回调函数
*/
res = (*sproc)(ep, &txlist, priv);
write_lock_irq(&ep->lock);
/*
* During the time we spent inside the "sproc" callback, some
* other events might have been queued by the poll callback.
* We re-insert them inside the main ready-list here.
*
* 在我们处于"sproc"回调函数内部的这段时间里
* 还有一些其他事件可能已被轮询回调函数加入到了队列中
* 我们在此处将它们重新插入到主就绪列表中
*/
for (nepi = READ_ONCE(ep->ovflist); (epi = nepi) != NULL;
nepi = epi->next, epi->next = EP_UNACTIVE_PTR) {
/*
* We need to check if the item is already in the list.
* During the "sproc" callback execution time, items are
* queued into ->ovflist but the "txlist" might already
* contain them, and the list_splice() below takes care of them.
*
* 我们需要检查一下这个条目是否已经在列表里了
* 在"特殊处理(sproc)"回调执行期间条目会被排入->ovflist
* 但txlist里可能已经包含它们了,而下面的list_splice()操作会负责处理这些(已存在的)条目
*/
if (!ep_is_linked(epi)) {
/*
* ->ovflist is LIFO, so we have to reverse it in order
* to keep in FIFO.
*
* -> 由于队列遵循后进先出原则,所以我们需要对其进行反转,以便保持先进先出的顺序。
*/
list_add(&epi->rdllink, &ep->rdllist);
ep_pm_stay_awake(epi);
}
}
/*
* We need to set back ep->ovflist to EP_UNACTIVE_PTR, so that after
* releasing the lock, events will be queued in the normal way inside
* ep->rdllist.
*
* 我们需要将 ep->ovflist 设为 EP_UNACTIVE_PTR,这样在释放锁之后,事件就会按照正常方式依次存放在 ep->rdllist 中。
*/
WRITE_ONCE(ep->ovflist, EP_UNACTIVE_PTR);
/*
* Quickly re-inject items left on "txlist".
*/
list_splice(&txlist, &ep->rdllist);
__pm_relax(ep->ws);
if (!list_empty(&ep->rdllist)) {
/*
* Wake up (if active) both the eventpoll wait list and
* the ->poll() wait list (delayed after we release the lock).
*
* (如果处于激活状态)同时唤醒事件轮询等待列表和
* ->poll()等待列表(在我们释放锁之后延迟进行)
*/
if (waitqueue_active(&ep->wq))
wake_up(&ep->wq);
if (waitqueue_active(&ep->poll_wait))
pwake++;
}
write_unlock_irq(&ep->lock);
if (!ep_locked)
mutex_unlock(&ep->mtx);
/**
* We have to call this outside the lock
* 我们得把这个东西从锁里取出来。
*/
if (pwake)
ep_poll_safewake(&ep->poll_wait);
return res;
}核心思想
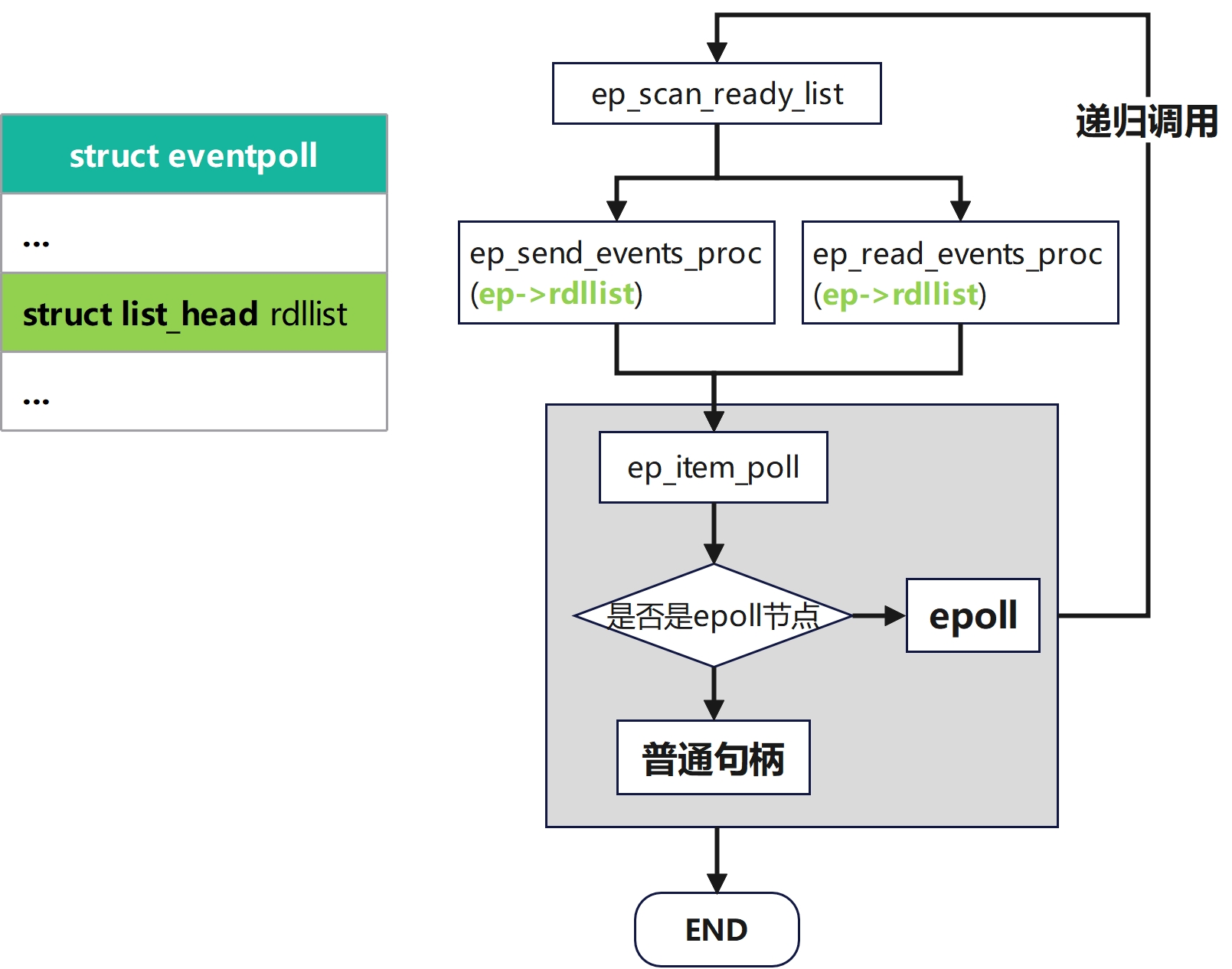
ep_scan_ready_list函数的执行可以分为以下步骤
复制就绪链表然后将副本传入函数指针sproc,这里会根据不同的场景使用ep_read_events_proc或ep_send_events_proc来对就绪链表处理
**ep_read_events_proc函数:**用于处理就绪链表,返回就绪事件给用户态,处理边沿触发和水平触发事件
ep_send_events_proc函数: epoll模块面向VFS的poll方法
遍历缓存队列将缓存的值放回就行队列中,根据检查结果更新rdllist链表,然后唤醒等待链表
多层嵌套与锁:
这里需要注意ep_read_events_proc函数和ep_send_events_proc函数,都会在内部调用ep_item_poll函数来对红黑树节点执行等价于vfs的poll的操作,如果这时遇到了嵌套epoll的情况,及检查的节点是epoll节点,那么这时会再调用ep_send_events_proc函数,造成一个嵌套调用,这种嵌套的出口是找到最终的不是epoll的句柄
由于ep_insert函数插入时就检查过环路问题,所以这里不会出现环形调用
7. 分类处理水平触发(LT)和边沿触发(ET)并返回就绪事件
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c++
// linux-5.4/fs/eventpoll.c
static __poll_t ep_send_events_proc(struct eventpoll *ep, struct list_head *head,
void *priv)
{
struct ep_send_events_data *esed = priv;
__poll_t revents;
struct epitem *epi, *tmp;
struct epoll_event __user *uevent = esed->events;
struct wakeup_source *ws;
poll_table pt;
init_poll_funcptr(&pt, NULL);
esed->res = 0;
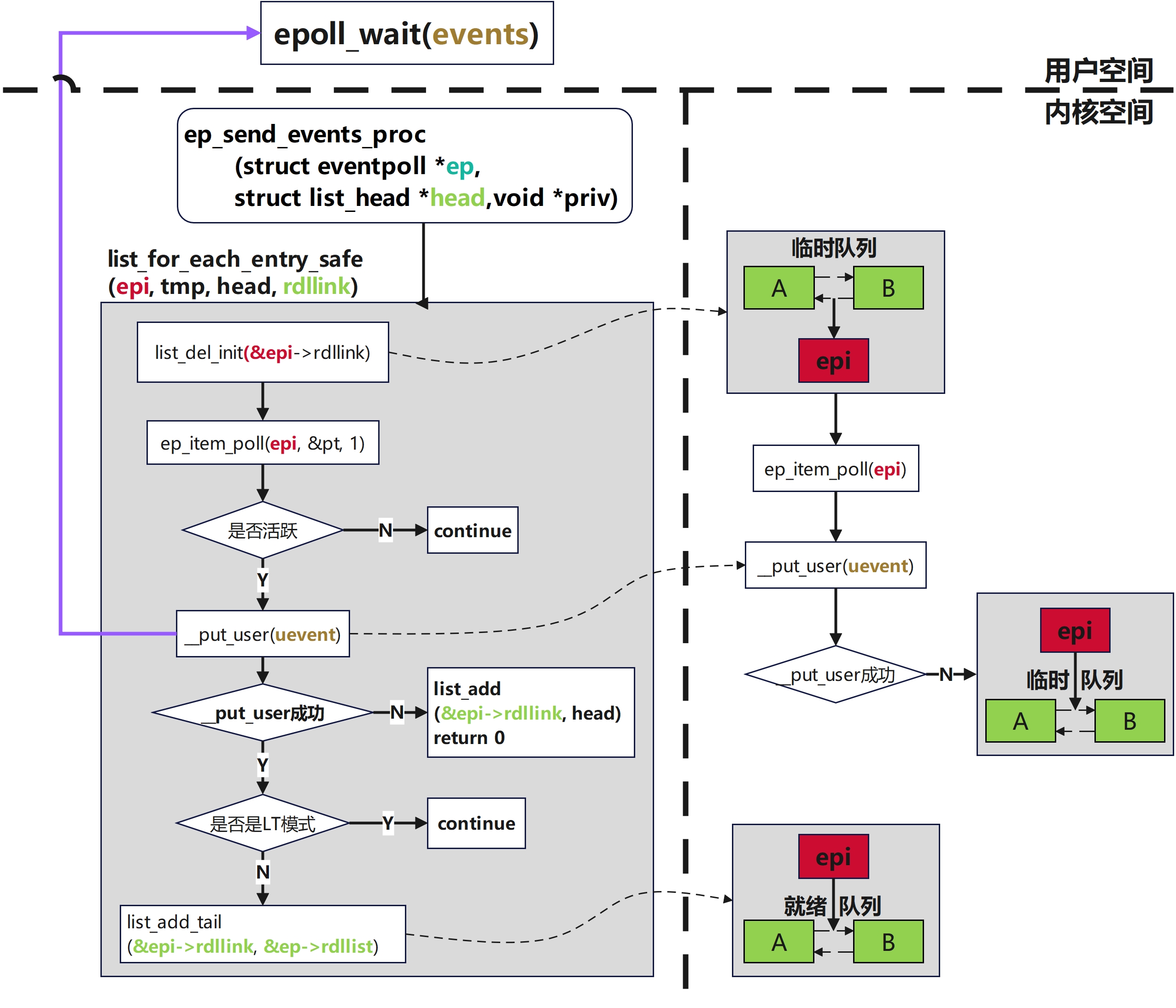
/* 遍历临时队列即就绪队列的副本 */
list_for_each_entry_safe(epi, tmp, head, rdllink) {
/* 从当前链表里摘掉节点 */
list_del_init(&epi->rdllink);
/* 检查事件是否就绪 */
revents = ep_item_poll(epi, &pt, 1);
if (!revents)
continue;
/* 将就绪事件和对应的节点返回到用户态 */
if (__put_user(revents, &uevent->events) ||
__put_user(epi->event.data, &uevent->data)) {
/* 如果复制到用户态失败,将节点重新加入就绪队列 */
list_add(&epi->rdllink, head);
ep_pm_stay_awake(epi);
if (!esed->res)
esed->res = -EFAULT;
return 0;
}
esed->res++;
uevent++;
/* Edge Triggered,边缘触发模式下,事件只处理一次不向用户重复上报同一监听 */
if (epi->event.events & EPOLLONESHOT)
/**
* 去掉EPOLLIN、EPOLLOUT等真正的I/O事件掩码,只保留私有/模式位(WAKEUP、ONESHOT、ET、EXCLUSIVE)
* 之后在ep_poll_callback()里会先检查:掩码里只剩私有位→视为disabled(已禁用),即使底层fd再次可读
* 也不会再进rdllist,直到用户epoll_ctl(EPOLL_CTL_MOD,...)重新写上EPOLLIN等
*/
epi->event.events &= EP_PRIVATE_BITS;
/* Level Triggered,水平触发模式下,条件还在就继续报,事件上报后重新加入就绪队列 */
else if (!(epi->event.events & EPOLLET)) {
list_add_tail(&epi->rdllink, &ep->rdllist);
ep_pm_stay_awake(epi);
}
}
return 0;
}LT模式和ET模式
| 模式 | 标志 | 含义 |
|---|---|---|
LT(Level Trigger,水平触发) |
默认,不设 EPOLLET |
只要条件仍然成立(例如仍有数据可读),epoll_wait 可以反复通知你 |
ET(Edge Trigger,边沿触发) |
EPOLLET |
只在条件从无到有(或发生变化)时通知一次;交付后若条件还在,不会因 LT 那样自动再进就绪队列 |
处理临时队列中的每一节点,检查是否有活跃事件
核心思想:
如果有则将事件返回给用户态,然后按照LT模式和ET模式分别处理
对于LT模式,会将触发的事件重新放回就绪队列中,在下一次会继续返回给用户态。对于ET模式当前事件处理完后就不再处理
七、epoll实例增删改查
1. ep_insert函数
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c
// linux-5.4/fs/eventpoll.c
/**
* 设置等待队列回调函数是ep_poll_callback,并将对应的等待队列和对应的epitem节点记录
* 在新创建的eppoll_entry节点中,其加入到对应的epitem节点的等待队列链表中
*/
static void ep_ptable_queue_proc(struct file *file, wait_queue_head_t *whead,
poll_table *pt)
{
struct epitem *epi = ep_item_from_epqueue(pt);
struct eppoll_entry *pwq;
if (epi->nwait >= 0 && (pwq = kmem_cache_alloc(pwq_cache, GFP_KERNEL))) {
/* 设置等待队列回调为 ep_poll_callback,并记录对应的等待队列和对应的epitem节点 */
init_waitqueue_func_entry(&pwq->wait, ep_poll_callback);
pwq->whead = whead;
pwq->base = epi;
if (epi->event.events & EPOLLEXCLUSIVE)
add_wait_queue_exclusive(whead, &pwq->wait);
else
add_wait_queue(whead, &pwq->wait);
/* 把这个pwq添加到到该epitem的链表上 */
list_add_tail(&pwq->llink, &epi->pwqlist);
epi->nwait++;
} else {
epi->nwait = -1;
}
}
// linux-5.4/fs/eventpoll.c
static int ep_insert(struct eventpoll *ep, const struct epoll_event *event,
struct file *tfile, int fd, int full_check)
{
int pwake = 0;
__poll_t revents;
struct epitem *epi;
struct ep_pqueue epq;
/* 初始化各类链表,节点*/
INIT_LIST_HEAD(&epi->rdllink);
INIT_LIST_HEAD(&epi->fllink);
INIT_LIST_HEAD(&epi->pwqlist);
epi->ep = ep;
ep_set_ffd(&epi->ffd, tfile, fd);
epi->event = *event;
epi->nwait = 0;
epi->next = EP_UNACTIVE_PTR;
/* 创建电源管理相关的唤醒源 */
ep_create_wakeup_source(epi);
/**
* 创建内核vfs_poll使用的poll_table,并将poll_table->_qproc设置为ep_ptable_queue_proc
* 在后续ep_item_poll()中调用具体内核对象的poll方法时使用
*/
epq.epi = epi;
init_poll_funcptr(&epq.pt, ep_ptable_queue_proc);
/**
* 把新epitem接到目标文件的poll/waitqueue队列上,并顺便读出此刻是否已经就绪的事件位
* 需要注意在此操作完成后注册的回调函数就可以开始处理新的项了
*/
revents = ep_item_poll(epi, &epq.pt, 1);
/**
* epitem通过epi->fllink挂到被监控文件 tfile->f_ep_link即epi->ffd.file上当这个struct file被关闭时
* 内核能顺着f_ep_links找到所有还在监听它的epoll项,把它们卸掉
*/
list_add_tail_rcu(&epi->fllink, &tfile->f_ep_links);
/* 将节点插入红黑树中 */
ep_rbtree_insert(ep, epi);
/**
* We have to drop the new item inside our item list to keep track of it
* 我们得从我们的物品清单中删除这个新项目,以便对其进行跟踪管理
*/
write_lock_irq(&ep->lock);
/* 如果该文件已经"准备就绪",我们就将其放入"已准备就绪"的列表中 */
if (revents && !ep_is_linked(epi)) {
list_add_tail(&epi->rdllink, &ep->rdllist);
ep_pm_stay_awake(epi);
/* 通知等待中的任务,事件已准备好可供使用 */
if (waitqueue_active(&ep->wq))
wake_up(&ep->wq);
if (waitqueue_active(&ep->poll_wait))
pwake++;
}
write_unlock_irq(&ep->lock);
/* ep->user所指向的struct user_struct里的epoll_watches计数(当前被epoll监视的条目数量)加1 */
atomic_long_inc(&ep->user->epoll_watches);
/**
* We have to call this outside the lock
* 我们得把这个东西从锁里取出来
*/
if (pwake)
ep_poll_safewake(&ep->poll_wait);
return 0;
}核心思想
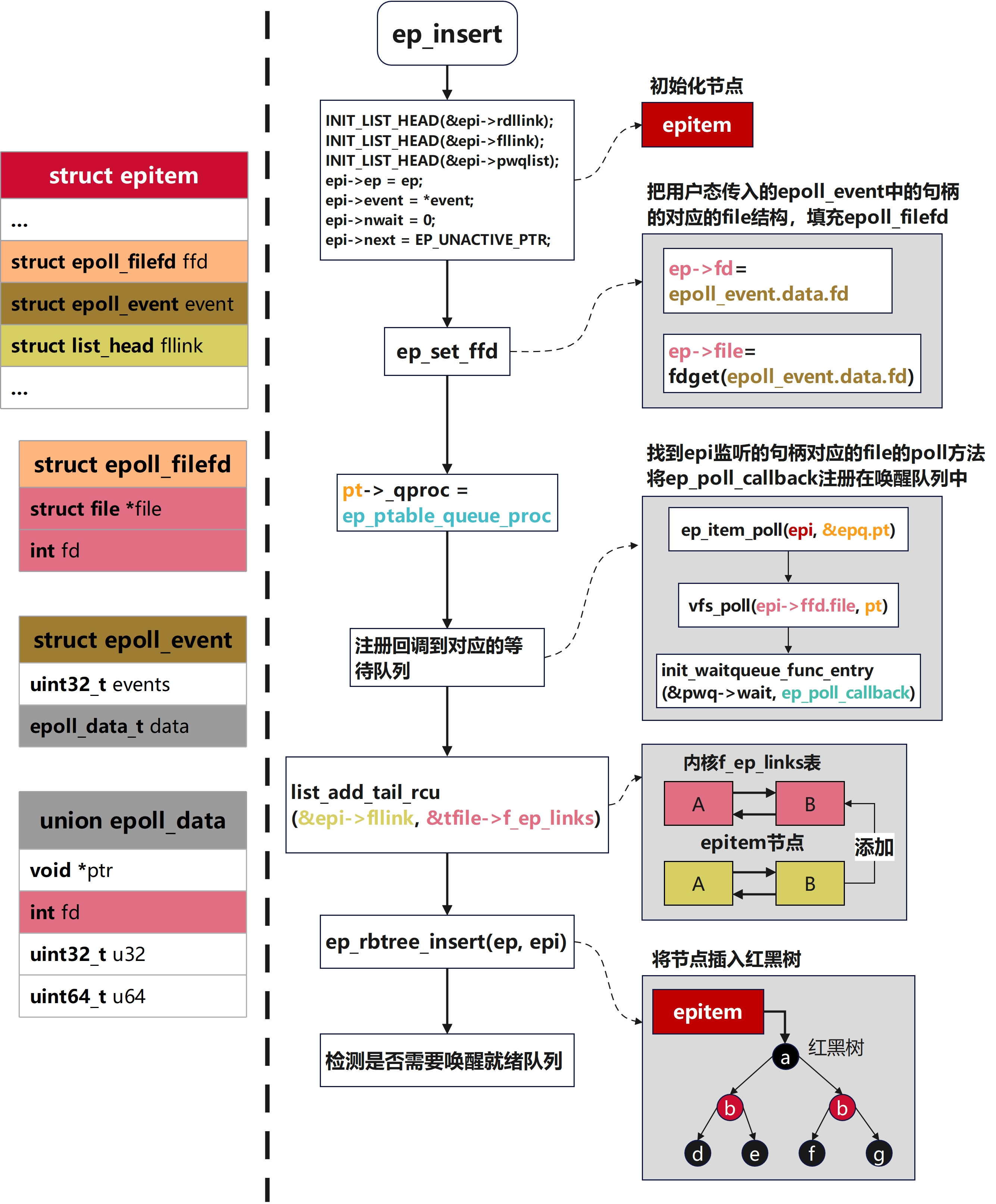
函数大致分为这几部分
- 创建和初始化
epitem节点,将poll_table->_qproc设置为ep_ptable_queue_proc - 把新
epitem节点添加到红黑树中,把新epitem接到目标文件的poll/waitqueue队列上,这一步之后新事件就开始检测新事件了 - 把
epi节点添加到内核f_ep_links表中,方便内核管理,避免出现悬垂指针 - 检测有没有新的事件,如果有则唤醒就绪队列
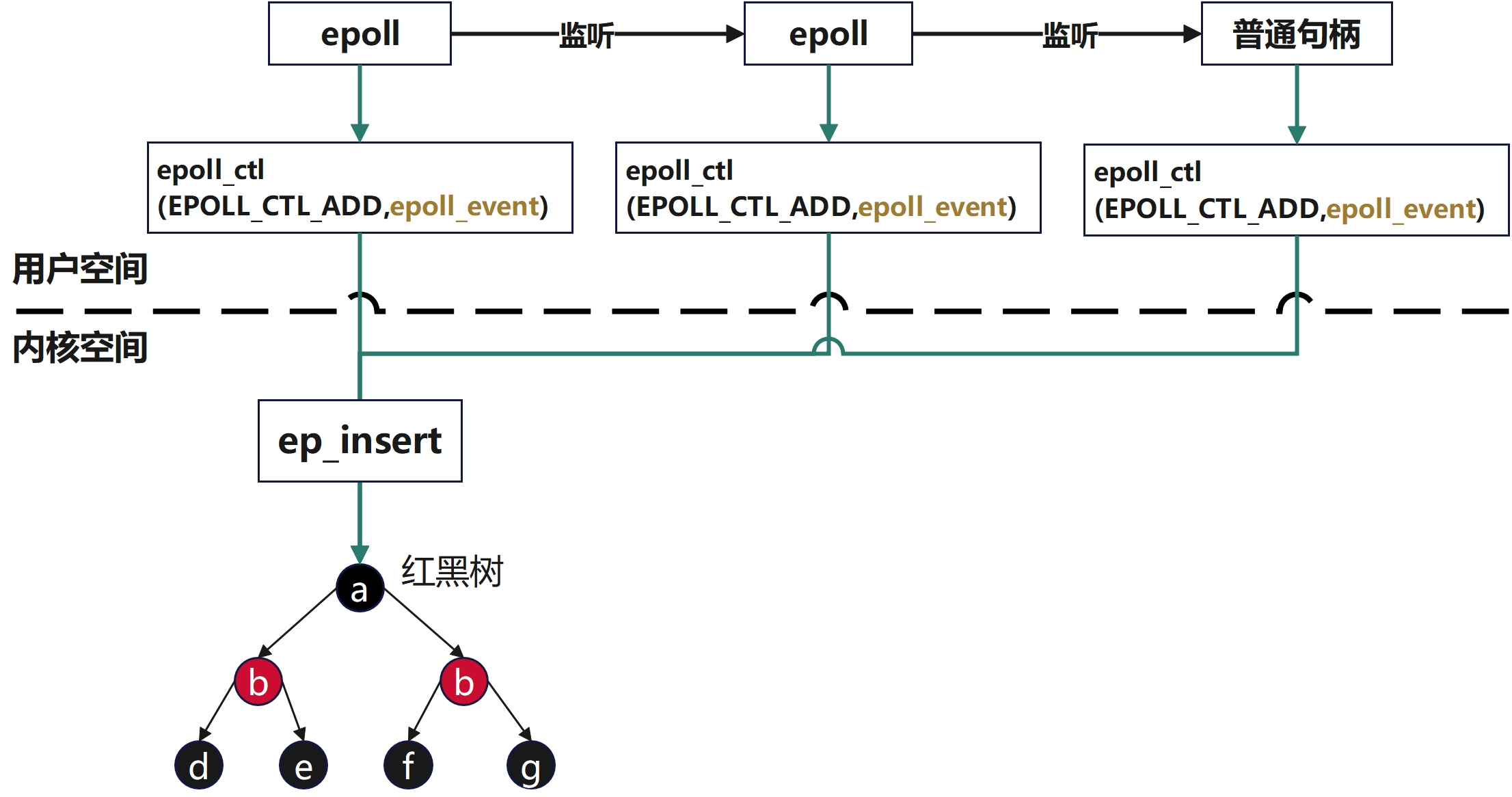
epoll嵌套
epoll在添加新的节点时,是可以存在epoll监听epoll的情况,但是不允许出现环形调用和过深的嵌套
ep_rbtree_insert函数
插入新的节点
源代码如下
笔者注:除注释外,所有代码均未删改
c
// linux-5.4/fs/eventpoll.c
static int ep_insert(struct eventpoll *ep, const struct epoll_event *event,
struct file *tfile, int fd, int full_check)
{
...
ep_rbtree_insert(ep, epi);
...
}
/* 是真正向红黑树中插入节点的函数 */
static void ep_rbtree_insert(struct eventpoll *ep, struct epitem *epi)
{
int kcmp;
struct rb_node **p = &ep->rbr.rb_root.rb_node, *parent = NULL;
struct epitem *epic;
bool leftmost = true;
/* 遍历红黑树,找到合适的插入位置 */
while (*p) {
parent = *p;
/* 通过父节点获取对应的 epitem 结构体 */
epic = rb_entry(parent, struct epitem, rbn);
/* 比较当前节点与要插入的节点 */
kcmp = ep_cmp_ffd(&epi->ffd, &epic->ffd);
/* 如果要插入节点的关键字大于当前节点,则向右子树查找,否则向左子树查找 */
if (kcmp > 0) {
p = &parent->rb_right;
leftmost = false; // 标记不是最左侧节点
} else {
p = &parent->rb_left;
}
}
/* 将新节点链接到父节点上,并重新平衡红黑树 */
rb_link_node(&epi->rbn, parent, p);
rb_insert_color_cached(&epi->rbn, &ep->rbr, leftmost);
}核心思想
采用深度优先的策略,遍历红黑树找到目标节点,然后将节点插入
2. ep_remove函数
从红黑树中删除节点
核心逻辑如下
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c
// linux-5.4/fs/eventpoll.c
/*
* Removes a "struct epitem" from the eventpoll RB tree and deallocates
* all the associated resources. Must be called with "mtx" held.
*/
static int ep_remove(struct eventpoll *ep, struct epitem *epi)
{
/* 移除轮询等待队列钩子 */
ep_unregister_pollwait(ep, epi);
list_del_rcu(&epi->fllink); // 从epoll钩子列表中移除当前epitem
/* 从红黑树中移除当前epitem */
rb_erase_cached(&epi->rbn, &ep->rbr);
/**
* 检查当前epitem是否已经链接到某个链表中
* 如果已链接,则从事件轮询的链表中移除
*/
if (ep_is_linked(epi))
list_del_init(&epi->rdllink);
return 0;
}3. ep_modify函数
修改节点
核心逻辑如下
笔者注:下文代码已格式化处理,并适当简化只保留核心逻辑
c
// linux-5.4/fs/eventpoll.c
/*
* Modify the interest event mask by dropping an event if the new mask
* has a match in the current file status. Must be called with "mtx" held.
*/
static int ep_modify(struct eventpoll *ep, struct epitem *epi,
const struct epoll_event *event)
{
int pwake = 0;
poll_table pt;
lockdep_assert_irqs_enabled();
init_poll_funcptr(&pt, NULL);
epi->event.events = event->events;
epi->event.data = event->data;
/*
* 检查当前节点是否设置了EPOLLWAKEUP,如果设置了,且当前 epitem 没有唤醒源,则创建一个;
* 如果未设置,且当前有唤醒源,则销毁它
*/
if (epi->event.events & EPOLLWAKEUP) {
if (!ep_has_wakeup_source(epi))
ep_create_wakeup_source(epi);
} else if (ep_has_wakeup_source(epi)) {
ep_destroy_wakeup_source(epi);
}
/* 通过vfs_poll或检查rdllink链表,判断当前节点是否准备就绪 */
if (ep_item_poll(epi, &pt, 1)) {
/* 检查当前接节点是否链接到rdllink链表上 */
if (!ep_is_linked(epi)) {
list_add_tail(&epi->rdllink, &ep->rdllist);
/* 保持epoll活跃 */
ep_pm_stay_awake(epi);
if (waitqueue_active(&ep->wq))
wake_up(&ep->wq);
if (waitqueue_active(&ep->poll_wait))
pwake++;
}
}
if (pwake)
ep_poll_safewake(&ep->poll_wait);
return 0;
}4. ep_find函数
在红黑树中查找节点
源代码如下
笔者注:除注释外,所有代码均未删改
c
// linux-5.4/fs/eventpoll.c
static struct epitem *ep_find(struct eventpoll *ep, struct file *file, int fd)
{
int kcmp;
struct rb_node *rbp;
struct epitem *epi, *epir = NULL;
struct epoll_filefd ffd;
/* 设置epoll_filefd结构体,用于比较查找 */
ep_set_ffd(&ffd, file, fd);
/* 遍历红黑树 */
for (rbp = ep->rbr.rb_root.rb_node; rbp; ) {
/* 通过父节点获取对应的 epitem 结构体 */
epi = rb_entry(rbp, struct epitem, rbn);
/* 比较当前节点与要插入的节点 */
kcmp = ep_cmp_ffd(&ffd, &epi->ffd);
/* 如果要插入节点的关键字大于当前节点,则向右子树查找,否则向左子树查找 */
if (kcmp > 0)
rbp = rbp->rb_right;
else if (kcmp < 0)
rbp = rbp->rb_left;
else {
epir = epi;
break;
}
}
return epir;
}核心思想
采用深度优先的策略,遍历红黑树找到目标节点
八、面向VFS部分的接口
笔者注:本章后续完善补充
eventpoll_fops结构体中注册了数个用于面向VFS的接口,在ep_alloc中初始化时会被使用
源代码如下
笔者注:所有代码均未删改
c++
// linux-5.4/fs/eventpoll.c
/* File callbacks that implement the eventpoll file behaviour */
static const struct file_operations eventpoll_fops = {
#ifdef CONFIG_PROC_FS
.show_fdinfo = ep_show_fdinfo,
#endif
.release = ep_eventpoll_release,
.poll = ep_eventpoll_poll,
.llseek = noop_llseek,
};九、其他模块的poll方法实现
1. 驱动层面对文件系统的监听
file_operations->poll接口
函数声明
在linux-5.4\include\linux\fs.h中可以看到struct file_operations的定义
c
#define __bitwise __attribute__((bitwise))
typedef unsigned __bitwise __poll_t;
struct file_operations {
...
/* read意为读、write意为写、poll意为检测,探询 */
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
__poll_t (*poll) (struct file *, struct poll_table_struct *);
...
} __randomize_layout;函数实现
struct file_operations中的__poll_t是在驱动代码中实现,不同驱动代码实现方式不同。但都会调用poll_wait()函数
在此处列出例子
在linux-5.4\arch\powerpc\platforms\powernv\opal-prd.c中可以找到OPAL的驱动对于poll的实现
c
static const struct file_operations opal_prd_fops = {
...
.poll = opal_prd_poll,
...
};
static __poll_t opal_prd_poll(struct file *file,
struct poll_table_struct *wait)
{
poll_wait(file, &opal_prd_msg_wait, wait);
if (!opal_msg_queue_empty())
return EPOLLIN | EPOLLRDNORM;
return 0;
}在linux-5.4\arch\powerpc\kernel\rtasd.c中可以找到RTASD的驱动对于poll的实现
c
static __poll_t rtas_log_poll(struct file *file, poll_table * wait)
{
poll_wait(file, &rtas_log_wait, wait);
if (rtas_log_size)
return EPOLLIN | EPOLLRDNORM;
return 0;
}
static const struct file_operations proc_rtas_log_operations = {
...
.poll = rtas_log_poll,
...
};可以看到不同的驱动代码中都调用了poll_wait(),把当前进程加入到驱动里自定义的等待队列上,当驱动事件就绪后,就可以在驱动里自定义的等待队列上唤醒调用poll的进程。
2. 内核等待队列
等待队列基本流程如下
在select和poll模块中自己实现了pollwake函数作为等待队列回调
十、epoll与select、poll的对比
1) 用户态将文件描述符传入内核的方式
select:创建3个文件描述符集并拷贝到内核中,分别监听读、写、异常动作。这里受到单个进程可以打开的fd数量限制,默认是1024poll:将传入的struct pollfd结构体数组拷贝到内核中进行监听epoll:执行epoll_create会在内核的高速cache区中建立一颗红黑树以及就绪链表(该链表存储已经就绪的文件描述符)。接着用户执行的epoll_ctl函数添加文件描述符会在红黑树上增加相应的结点
2) 内核态检测文件描述符读写状态的方式
select:采用轮询方式,遍历所有fd,最后返回一个描述符读写操作是否就绪的mask掩码,根据这个掩码给fd_set赋值poll:同样采用轮询方式,查询每个fd的状态,如果就绪则在等待队列中加入一项并继续遍历epoll:采用回调机制。在执行epoll_ctl的add操作时,不仅将文件描述符放到红黑树上,而且也注册了回调函数,内核在检测到某文件描述符可读/可写时会调用回调函数,该回调函数将文件描述符放在就绪链表中
3) 找到就绪的文件描述符并传递给用户态的方式
select:将之前传入的fd_set拷贝传出到用户态并返回就绪的文件描述符总数。用户态并不知道是哪些文件描述符处于就绪态,需要遍历来判断poll:将之前传入的fd数组拷贝传出用户态并返回就绪的文件描述符总数。用户态并不知道是哪些文件描述符处于就绪态,需要遍历来判断epoll:epoll_wait只用观察就绪链表中有无数据即可,最后将链表的数据返回给数组并返回就绪的数量。内核将就绪的文件描述符放在传入的数组中,所以只用遍历依次处理即可。这里返回的文件描述符是通过mmap让内核和用户空间共享同一块内存实现传递的,减少了不必要的拷贝
4) 重复监听的处理方式
select:将新的监听文件描述符集合拷贝传入内核中,继续以上步骤poll:将新的struct pollfd结构体数组拷贝传入内核中,继续以上步骤epoll:无需重新构建红黑树,直接沿用已存在的即可
十一、总结
epoll更高效的原因
1)select和poll的动作基本一致,只是poll采用链表来进行文件描述符的存储,而select采用fd标注位来存放,所以select会受到最大连接数的限制,而poll不会
2)select、poll、epoll虽然都会返回就绪的文件描述符数量。但是select和poll并不会明确指出是哪些文件描述符就绪,而epoll会。造成的区别就是,系统调用返回后,调用select和poll的程序需要遍历监听的整个文件描述符找到是谁处于就绪,而epoll则直接处理即可
3)select、poll都需要将有关文件描述符的数据结构拷贝进内核,最后再拷贝出来。而epoll创建的有关文件描述符的数据结构本身就存于内核态中,系统调用返回时利用mmap()文件映射内存加速与内核空间的消息传递:即epoll使用mmap减少复制开销
4)select、poll采用轮询的方式来检查文件描述符是否处于就绪态,而epoll采用回调机制。造成的结果就是,随着fd的增加,select和poll的效率会线性降低,而epoll不会受到太大影响,除非活跃的socket很多
5)epoll的边缘触发模式效率高,系统不会充斥大量不关心的就绪文件描述符
虽然epoll的性能最好,但是在连接数少并且连接都十分活跃的情况下,select和poll的性能可能比epoll好,毕竟epoll的通知机制需要很多函数回调
参考文档
图解 | 深入揭秘 epoll 是如何实现 IO 多路复用的!-腾讯云开发者社区-腾讯云 (tencent.com)