启动ardupilot模型
////////////////////////// //这是第二次尝试成功的步骤
sudo rm -f /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
sudo curl -fsSL https://packages.osrfoundation.org/gazebo.gpg | sudo gpg --dearmor -o /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
sudo chmod 644 /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg
echo "deb arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg https://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list
sudo rm -f /etc/apt/sources.list.d/gazebo*.list.old
sudo apt update
sudo apt install gz-harmonic -y
//////////////
sudo rm -f /etc/apt/sources.list.d/gazebo*.list
sudo bash -c 'echo "deb arch=$(dpkg --print-architecture) https://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" > /etc/apt/sources.list.d/gazebo-stable.list'
sudo apt update
sudo apt install gz-harmonic -y
gz sim --version
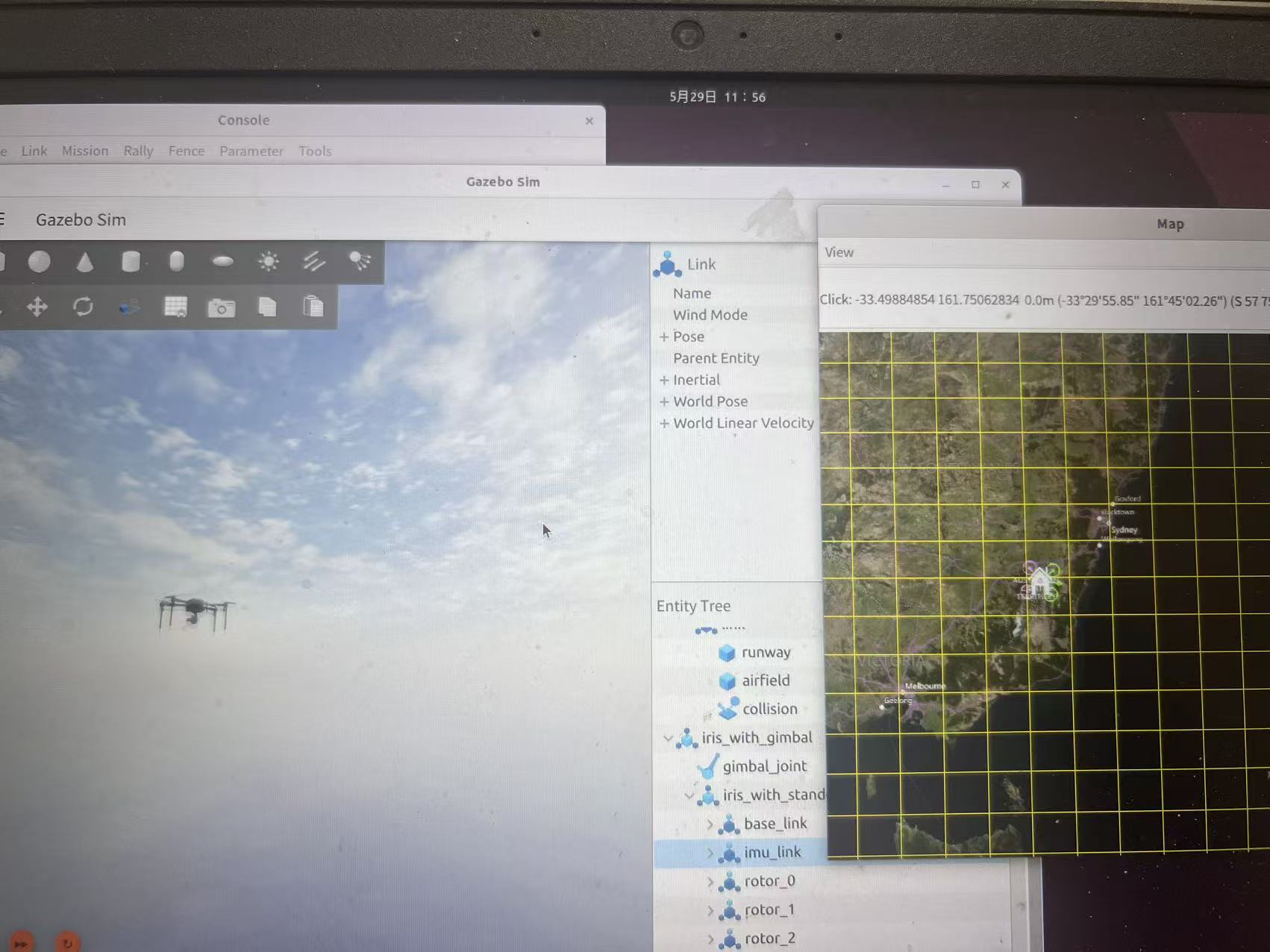
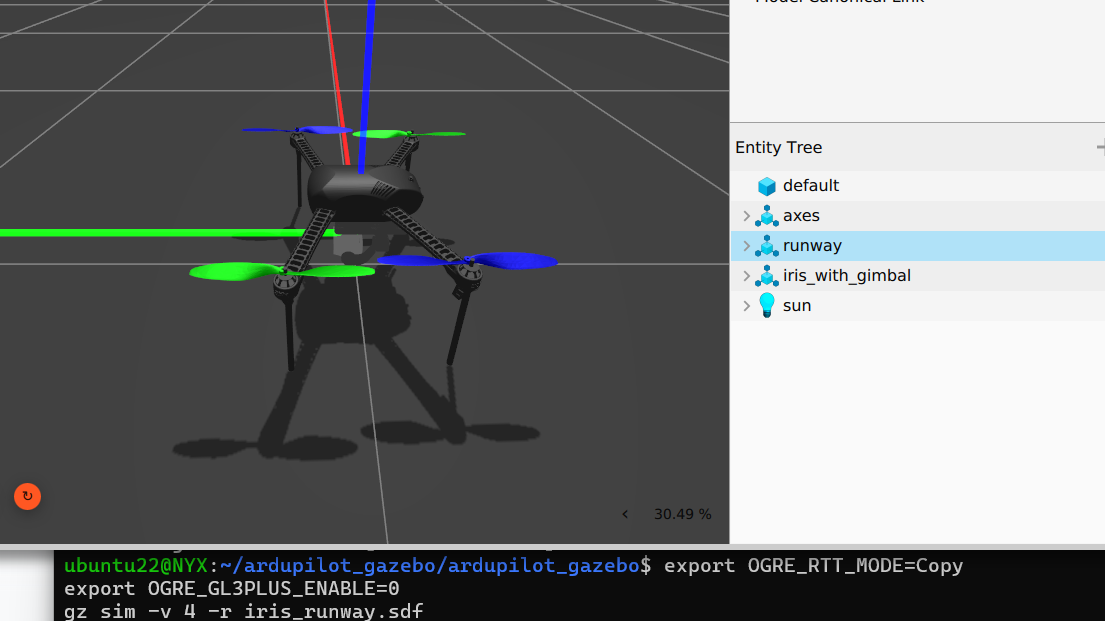
gz sim -v4 -r iris_runway.sdf
gz sim -v 4 -r worlds/iris_runway.sdf
./Tools/autotest/sim_vehicle.py -v ArduCopter -f gazebo-iris --model JSON --frame calibration --console --map