搭建基本环境Ubuntu22.04+gazebo+ardupilot
- 跑通Ardupilot和Gazebo
-
查看主机IP(Python程序所在电脑的IP)
bashipconfig 172.22.46.xx
- 启动gazebo和ardupilot
-
启动gazebo
bashcd ardupilot_gazebo gz sim -v4 -r iris_runway.sdf --render-engine ogre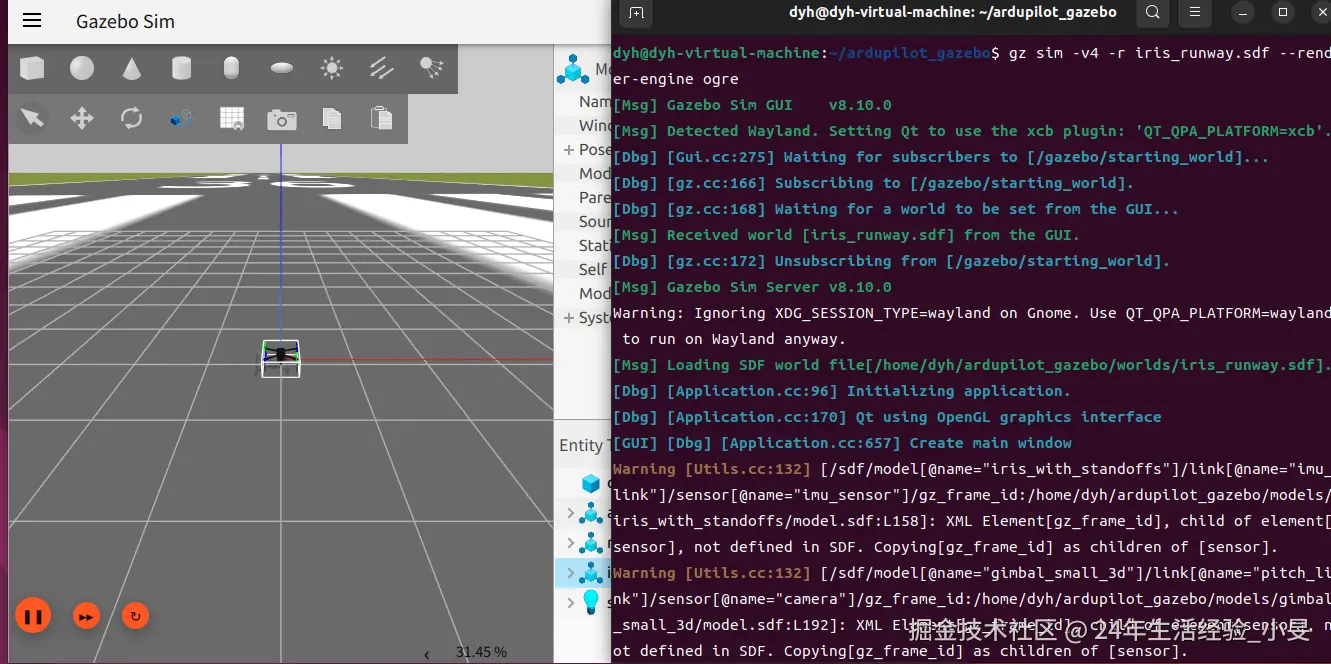
-
启动ardupilot 将数据通过14550端口转发出去,并可以通过该端口接受命令,双向通信
bashcd ardupilot sim_vehicle.py -v ArduCopter -f gazebo-iris --model JSON --map --console --out=udp:172.22.46.xx:14550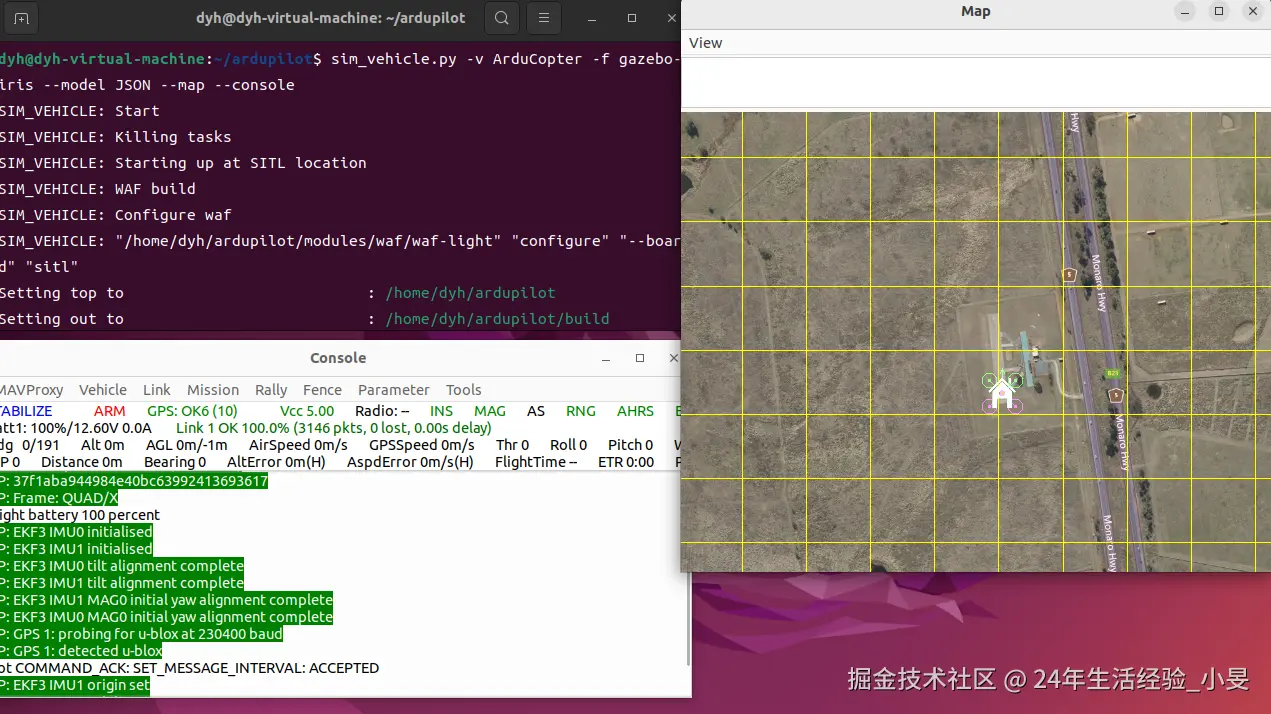
-
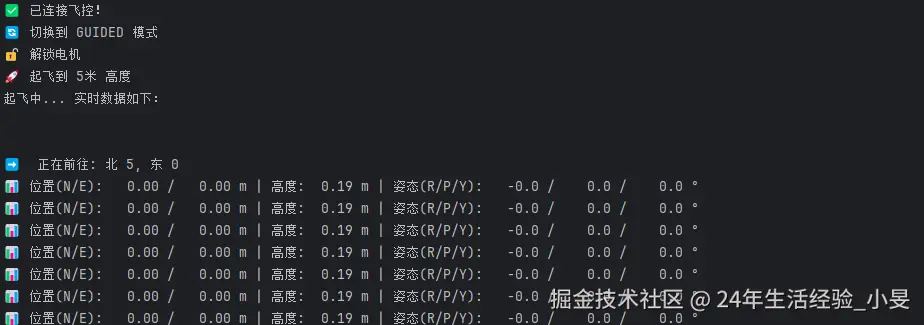
运行Python代码
pythonfrom pymavlink import mavutil import time # 建立连接 master = mavutil.mavlink_connection('udpin:0.0.0.0:14550') master.wait_heartbeat() print("✅ 已连接飞控!") def set_target_location(n, e, d): """ 发送本地 NED 坐标目标点 n: 北向位移 (米) e: 东向位移 (米) d: 高度 (注意:NED系中,高度为负值,-5代表上方5米) """ master.mav.set_position_target_local_ned_send( 0, # 时间戳 master.target_system, master.target_component, mavutil.mavlink.MAV_FRAME_LOCAL_NED, # 使用本地坐标系 0b0000111111111000, # 掩码:只关注位置信息 (X, Y, Z) n, e, d, # 目标位置 0, 0, 0, # 速度 0, 0, 0, # 加速度 0, 0 # 偏航角 ) def wait_reach_target(target_n, target_e, threshold=0.3): """等待无人机到达目标点误差范围内 + 实时打印姿态数据""" while True: # -------------------------- # 【核心新增】实时获取并打印数据 # -------------------------- # 1. 获取位置 (NED) pos_msg = master.recv_match(type='LOCAL_POSITION_NED', blocking=True) # 2. 获取姿态 (角速率 / 欧拉角) att_msg = master.recv_match(type='ATTITUDE', blocking=True) # 解析数据 # 位置 north = pos_msg.x # 北 east = pos_msg.y # 东 down = pos_msg.z # 下(负值=高度) alt_abs = -down # 真实高度(米) # 姿态 (弧度转角度) roll = att_msg.roll * 180 / 3.14159 # 横滚 pitch = att_msg.pitch * 180 / 3.14159 # 俯仰 yaw = att_msg.yaw * 180 / 3.14159 # 偏航 # 速度 v_n = pos_msg.vx v_e = pos_msg.vy v_d = pos_msg.vz # -------------------------- # 【打印】位置 + 姿态 + 高度 # -------------------------- print(f"📊 位置(N/E): {north:6.2f} / {east:6.2f} m | " f"高度: {alt_abs:5.2f} m | " f"姿态(R/P/Y): {roll:6.1f} / {pitch:6.1f} / {yaw:6.1f} °") # 判断是否到达目标点 dist = ((pos_msg.x - target_n) ** 2 + (pos_msg.y - target_e) ** 2) ** 0.5 if dist < threshold: print(f"\n🎯 到达目标点: ({target_n}, {target_e})") break time.sleep(0.2) # --- 任务开始 --- # 1. 切换模式、解锁、起飞 print("🔄 切换到 GUIDED 模式") master.mav.set_mode_send(master.target_system, mavutil.mavlink.MAV_MODE_FLAG_CUSTOM_MODE_ENABLED, 4) # GUIDED time.sleep(1) print("🔓 解锁电机") master.mav.command_long_send(master.target_system, master.target_component, mavutil.mavlink.MAV_CMD_COMPONENT_ARM_DISARM, 0, 1, 0, 0, 0, 0, 0, 0) time.sleep(2) print("🚀 起飞到 5米 高度") master.mav.command_long_send(master.target_system, master.target_component, mavutil.mavlink.MAV_CMD_NAV_TAKEOFF, 0, 0, 0, 0, 0, 0, 0, 5) # 等待起飞并打印数据 print("起飞中... 实时数据如下:\n") time.sleep(8) # 2. 绘制正方形 (边长 5m) waypoints = [ (5, 0), # 向北 5m (5, 5), # 向东 5m (0, 5), # 向南 5m (0, 0) # 回到原点上方 ] for n, e in waypoints: print(f"\n➡️ 正在前往: 北 {n}, 东 {e}") set_target_location(n, e, -5) # 保持高度在 -5m (NED系) wait_reach_target(n, e) # 3. 降落 print("\n⏬ 回到原点,准备降落...") master.mav.command_long_send( master.target_system, master.target_component, mavutil.mavlink.MAV_CMD_NAV_LAND, 0, 0, 0, 0, 0, 0, 0, 0 ) # 4. 确认锁定 (Disarm) while True: heartbeat = master.recv_match(type='HEARTBEAT', blocking=True) if not (heartbeat.base_mode & mavutil.mavlink.MAV_MODE_FLAG_SAFETY_ARMED): print("\n🛬 降落完成,电机已锁定。") break time.sleep(1)- 结果
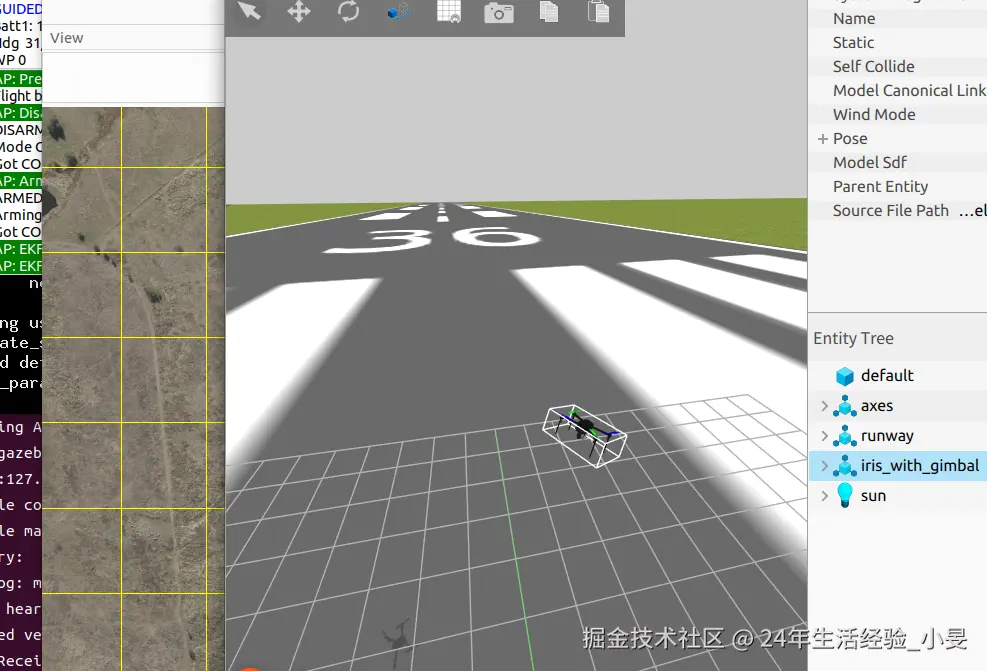
- 结果
-