摘要
面向 3D 打印机及其他开环步进驱动平台,本文提出一种基于步进脉冲相位调制的前馈谐波降噪方法。该方法通过三轴 MEMS 加速度计采集结构振动信号,利用快速傅里叶变换提取目标谐波频段能量,并在 STEP 脉冲发送端注入可控的微小时序扰动,以破坏性干涉方式抑制由步进电机转矩脉动引发的结构共振。全文围绕物理机理、数学建模、测量方法、参数辨识、全速域标定及工程实现展开,给出适用于 Cartesian 与 CoreXY 架构的建模与标定流程,并对贪心搜索、贝叶斯优化、线性插值与样条插值等方法进行比较。本文旨在为相关研究人员和工程实践者提供一套逻辑清晰、便于实现的技术说明。
1. 引言与总体方案
1.1 问题定义
在高速运行条件下,3D 打印机、点胶平台和轻型数控机构中的步进电机容易激发结构件、皮带和导轨的固有模态,表现为啸叫、共振和轮廓误差增加。问题根源并不完全来自控制指令本身,而是来自电机转矩脉动与机械结构频响之间的耦合。
对于采用开环驱动器的系统,仅依靠细分、电流斩波或机械加固往往难以在全速域内兼顾成本、噪声和动态性能。本文研究的核心问题是:能否在不改动电机内部电流闭环的前提下,仅通过步进脉冲的发送时序,对特定谐波进行前馈补偿,从而降低结构振动与噪声。
1.2 方法概述
本文采用前馈谐波振动抑制方法。基本思路如下:
- 在给定速度和方向下,采集机架三轴振动数据。
- 通过 FFT 提取目标谐波频段的能量特征。
- 在 STEP 脉冲时间轴上注入幅值为 AnA_nAn、相位为 ϕn\phi_nϕn 的周期扰动。
- 以三轴综合振动代价函数 JJJ 为目标,搜索使 JJJ 最小的参数组合。
- 在多个速度节点离线标定后,构建查找表或插值模型,供在线运行时调用。
该方法本质上是对原始运动指令做微小的时序整形,而不是改变宏观路径规划。因此,只要补偿幅值受控,理论上不会破坏轮廓精度和终点位置精度。
1.3 系统架构与工作流程
系统由运动规划、脉冲生成、振动测量、频域分析、参数寻优和在线补偿六个部分组成,其闭环标定流程可概括为:
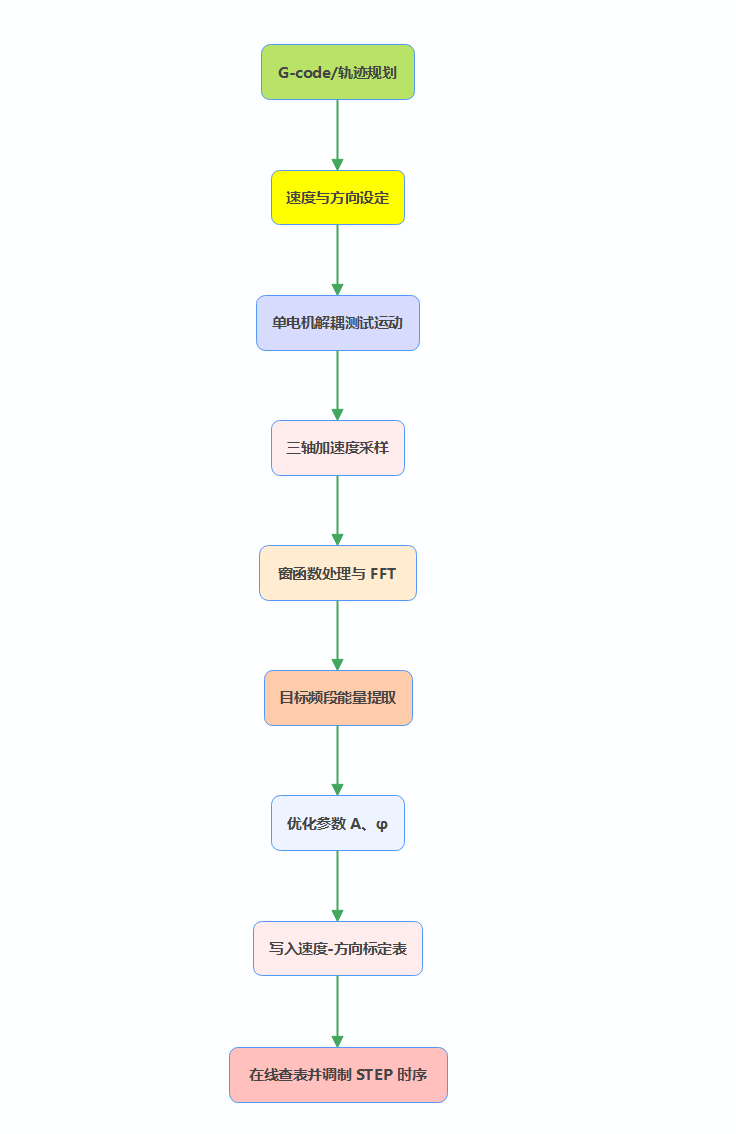
若从标定执行角度展开,可将其细化为更适合工程实现和教学理解的流程:

该展开流程强调了三个关键约束:一是标定必须带速度和方向信息,二是必须保证单电机解耦,三是参数搜索的评价依据始终来自统一的频域代价函数 JJJ。
1.4 适用范围与边界
本文方案适用于开环步进系统,尤其适合低成本、高速度、对噪声敏感的运动平台。对于具备高带宽电流环和位置环的闭环 FOC 或伺服系统,本文方法通常不作为首选,因为外部注入的时序扰动可能与底层闭环控制形成冲突。
1.5 本章小结
本章明确了研究对象、技术路线与系统边界。后续章节将依次说明谐波产生机理、测量与建模方法、参数优化策略以及工程实现方式。
2. 物理机理与数学模型
2.1 谐波与结构共振的来源
步进电机的实际电磁转矩并非理想正弦,而会受到齿槽转矩、反电动势非正弦性、加工误差及磁路不对称等因素影响,形成周期性脉动。可写为:
Te(θe)=Tsyncsin(θe)+∑k=1∞Tksin(kθe+αk)(2-1) T_e(\theta_e) = T_{sync}\sin(\theta_e) + \sum_{k=1}^{\infty} T_k\sin(k\theta_e + \alpha_k) \tag{2-1} Te(θe)=Tsyncsin(θe)+k=1∑∞Tksin(kθe+αk)(2-1)
式中,TsyncT_{sync}Tsync 为同步基波转矩,TkT_kTk 为第 kkk 次谐波转矩分量,θe\theta_eθe 为电气角。若这些谐波频率落入机架、导轨或皮带系统的固有频率附近,就会出现明显的结构共振与声学放大。
2.2 机械角与电气角映射
对于极对数为 NpN_pNp 的步进电机,机械角与电气角之间满足:
θe(t)=Np θm(t)(2-2) \theta_e(t) = N_p\,\theta_m(t) \tag{2-2} θe(t)=Npθm(t)(2-2)
其中,θm(t)\theta_m(t)θm(t) 为机械角,θe(t)\theta_e(t)θe(t) 为电气角。该映射说明,只要已知电机转速和极对数,即可推导激振基频及其倍频位置,为后续 FFT 目标频段提取提供依据。
2.3 位置脉位调制模型
未进行补偿时,匀速运动的理想位移可表示为:
xref(t)=vt(2-3) x_{ref}(t) = vt \tag{2-3} xref(t)=vt(2-3)
在引入谐波补偿后,实际发送给驱动器的参考位移修改为:
x(t)=vt+∑n∈{1,2,4}Ansin(2πfnt+ϕn)(2-4) x(t) = vt + \sum_{n \in \{1,2,4\}} A_n\sin(2\pi f_n t + \phi_n) \tag{2-4} x(t)=vt+n∈{1,2,4}∑Ansin(2πfnt+ϕn)(2-4)
其中,AnA_nAn 和 ϕn\phi_nϕn 分别为第 nnn 次谐波补偿的幅值和相位,fnf_nfn 为目标补偿频率。该表达式对应的工程含义是:在不改变宏观轨迹的条件下,对微观脉冲时序进行调制。
2.4 破坏性干涉条件
设结构原始振动响应为:
e(t)=Bsin(2πfvibt+θ)(2-5) e(t) = B\sin(2\pi f_{vib} t + \theta) \tag{2-5} e(t)=Bsin(2πfvibt+θ)(2-5)
若注入补偿分量
u(t)=Ansin(2πfnt+ϕn) u(t) = A_n\sin(2\pi f_n t + \phi_n) u(t)=Ansin(2πfnt+ϕn)
满足近似条件
An≈B,ϕn≈θ±π(2-6) A_n \approx B, \qquad \phi_n \approx \theta \pm \pi \tag{2-6} An≈B,ϕn≈θ±π(2-6)
则合成响应 e(t)+u(t)e(t)+u(t)e(t)+u(t) 在目标频段内趋于减小。该条件并不要求数学上完全相消,但为参数辨识提供了明确目标,即通过实验搜索找到最接近式 (2-6) 的参数对。
2.5 工程示例:G-code 到脉冲时序调制
以指令 G1 X100 F6000 为例,若 X 轴脉冲当量为 80 step/mm80\ \text{step/mm}80 step/mm,则 100 mm/s100\ \text{mm/s}100 mm/s 对应基准脉冲频率为:
fstep=100×80=8000 Hz f_{step} = 100 \times 80 = 8000\ \text{Hz} fstep=100×80=8000 Hz
若目标补偿频率为 130 Hz130\ \text{Hz}130 Hz,补偿幅值为 0.05 mm0.05\ \text{mm}0.05 mm,相位为 45∘45^\circ45∘,则位移模型可写为:
x(t)=100t+0.05sin(2π⋅130t+π4)(2-7) x(t)=100t+0.05\sin(2\pi\cdot130t+\tfrac{\pi}{4}) \tag{2-7} x(t)=100t+0.05sin(2π⋅130t+4π)(2-7)
为了让这个例子更容易理解,可以把它拆成"未补偿"和"补偿后"两种情况。
- 未补偿时,理想位移为:
xref(t)=100t x_{ref}(t)=100t xref(t)=100t
对应的累计脉冲数为:
Pref(t)=xref(t)×80=8000t P_{ref}(t)=x_{ref}(t)\times 80 = 8000t Pref(t)=xref(t)×80=8000t
这意味着脉冲发生器以固定频率 8000 Hz8000\ \text{Hz}8000 Hz 输出脉冲,相邻脉冲间隔为:
Δt=18000=125 μs \Delta t = \frac{1}{8000} = 125\ \mu s Δt=80001=125 μs
- 补偿后,位移参考变为式 (2-7),对应的累计脉冲数可写为:
Preal(t)=8000t+4sin(2π⋅130t+π4) P_{real}(t)=8000t + 4\sin(2\pi\cdot130t+\tfrac{\pi}{4}) Preal(t)=8000t+4sin(2π⋅130t+4π)
其中,0.05 mm0.05\ \text{mm}0.05 mm 的补偿幅值乘以 80 step/mm80\ \text{step/mm}80 step/mm,可换算为约 4 个 step 的微小位置扰动。它不会改变最终总脉冲数的大趋势,但会让局部脉冲间隔在 125 μs125\ \mu s125 μs 附近做周期性提前和滞后。
在工程上,可以把两种情况画成下面的时序对比图:
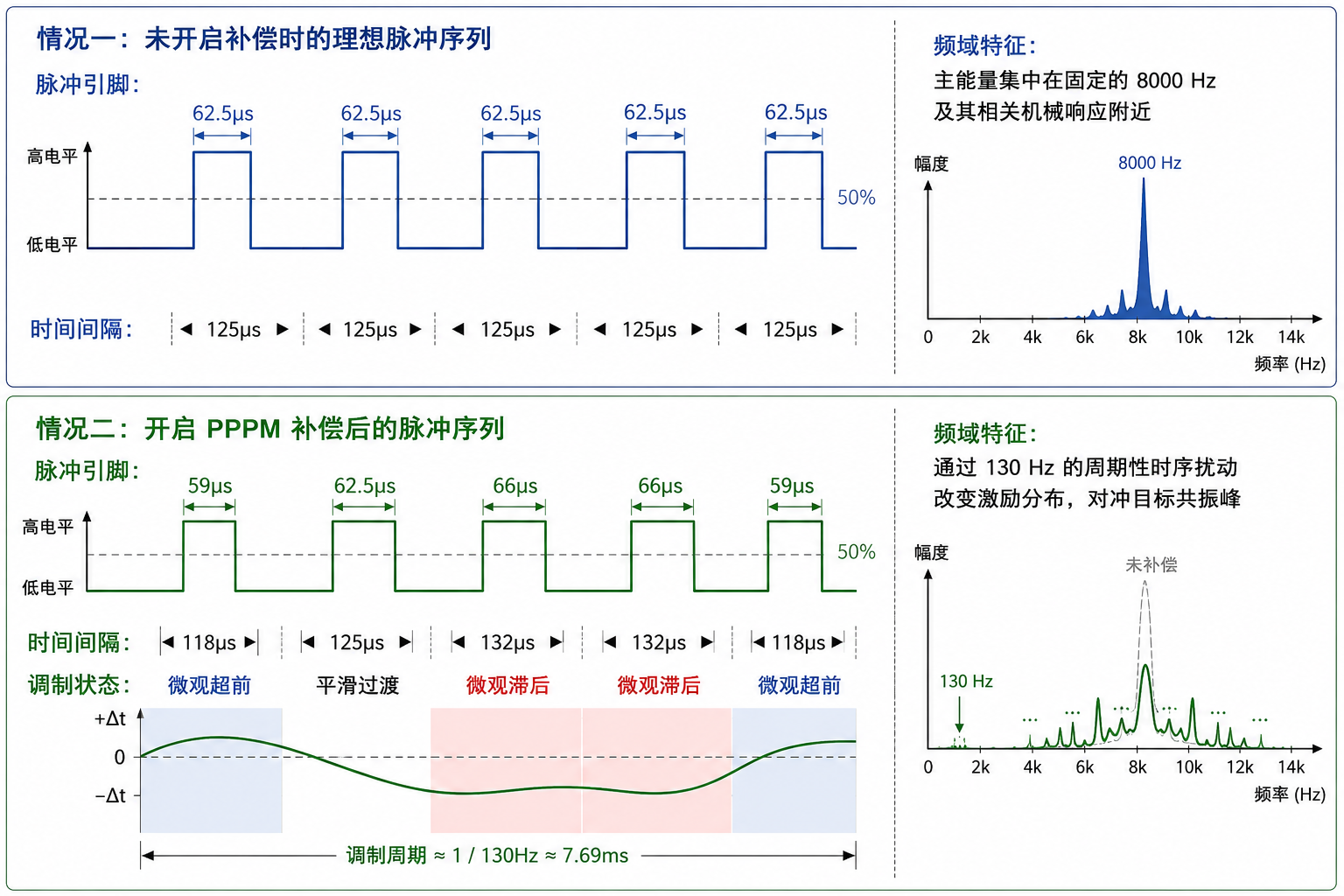
从这个图可以看出,PPPM 的关键不是"多发脉冲"或"少发脉冲",而是"在正确的时间稍微提前或稍微延后发出脉冲"。宏观上,执行器仍然会到达同样的位置;微观上,时序被重新排布,从而向机械系统注入一个相位可控的补偿激励。
从最容易理解的角度总结,这个过程等价于:
- 先按照正常轨迹计算应当何时发脉冲。
- 再根据查表得到的 AAA 和 ϕ\phiϕ,给这些脉冲附加一个周期性时间偏移。
- 该偏移的周期锁定在目标谐波频率附近,因此能对特定共振频段起作用。
因此,式 (2-7) 的作用不是改变运动路径,而是改变脉冲时序,从而改变系统受到的激励方式。
2.6 本章小结
本章说明了谐波噪声的物理来源,并建立了从转矩脉动到脉冲时序调制的数学联系。位置脉位调制的本质是可控前馈扰动,其目标是以较小的时序代价换取目标频段振动能量的下降。
3. 振动测量与代价函数构建
3.1 激振频率与运动速度映射
补偿参数的搜索依赖对目标激振频率的准确估计。对于同步带传动系统,若电机每转一圈带来的线位移为 LrevL_{rev}Lrev,则在 Cartesian 架构下,电机电气基频可写为:
fe,Cartesian=vheadLrevNp(3-1) f_{e,Cartesian} = \frac{v_{head}}{L_{rev}}N_p \tag{3-1} fe,Cartesian=LrevvheadNp(3-1)
在 CoreXY 架构的单电机解耦标定条件下,沿特定对角线运动时,单台电机实际线速度约为 2vhead\sqrt{2}v_{head}2 vhead,因此有:
fe,CoreXY=2vheadLrevNp(3-2) f_{e,CoreXY} = \frac{\sqrt{2}v_{head}}{L_{rev}}N_p \tag{3-2} fe,CoreXY=Lrev2 vheadNp(3-2)
该差异意味着同一打印头速度下,CoreXY 的目标谐波频率通常高于 Cartesian,因此对采样带宽与分析频率分辨率提出了更高要求。
为便于建立数量级直觉,下面给出两个直接的计算示例。设同步轮等效周长 Lrev=40 mmL_{rev}=40\ \text{mm}Lrev=40 mm,电机极对数 Np=50N_p=50Np=50,打印头标称速度 vhead=300 mm/sv_{head}=300\ \text{mm/s}vhead=300 mm/s。
- Cartesian 架构:
fe,Cartesian=30040×50=375 Hz f_{e,Cartesian}=\frac{300}{40}\times 50 = 375\ \text{Hz} fe,Cartesian=40300×50=375 Hz
若关心 4 倍频,则目标频率约为:
f4x=4×375=1500 Hz f_{4x}=4\times375=1500\ \text{Hz} f4x=4×375=1500 Hz
此时采样率至少应满足:
fs≥2×1500=3000 Hz f_s \ge 2\times1500 = 3000\ \text{Hz} fs≥2×1500=3000 Hz
- CoreXY 架构下的单电机解耦标定:
fe,CoreXY=2×375≈530.3 Hz f_{e,CoreXY}=\sqrt{2}\times375\approx530.3\ \text{Hz} fe,CoreXY=2 ×375≈530.3 Hz
若同样分析 4 倍频,则目标频率变为:
f4x=4×530.3≈2121.2 Hz f_{4x}=4\times530.3\approx2121.2\ \text{Hz} f4x=4×530.3≈2121.2 Hz
对应的最低采样率要求变为:
fs≥2×2121.2≈4242.4 Hz f_s \ge 2\times2121.2 \approx 4242.4\ \text{Hz} fs≥2×2121.2≈4242.4 Hz
这说明同样是 300 mm/s 的标称速度,CoreXY 在单电机解耦标定时对采样带宽的要求明显高于 Cartesian。若传感器最大输出率只有 3200 Hz,则足以覆盖前一种情况,但对后一种情况已经存在失真风险。
3.2 单电机解耦标定原则
为使输入参数与输出振动之间尽可能满足单输入单输出关系,标定时应保证同一时刻仅有一台电机主导激励。否则,多台电机同时运行会引入拍频、串扰和峰值漂移,降低参数搜索的可重复性。
对于 Cartesian 架构,可采用纯 X 或纯 Y 方向直线运动进行单轴标定。对于 CoreXY 架构,则应通过 45∘45^\circ45∘ 或 135∘135^\circ135∘ 对角线运动,使一台电机工作而另一台电机保持静止,从而完成单电机解耦。
3.3 正反向独立标定的必要性
理论上,若系统完全对称,则速度 +v+v+v 与 −v-v−v 的补偿参数应具有简单镜像关系;但在实际机构中,皮带张力、摩擦、回差和安装误差会导致明显的方向不对称。因此,正反向应分别标定,至少应分别记录相位参数,必要时幅值也应独立存储。
3.4 采样率与抗混叠约束
设目标分析频率上限为 fmaxf_{max}fmax,则采样频率应满足奈奎斯特条件:
fs≥2fmax(3-3) f_s \ge 2f_{max} \tag{3-3} fs≥2fmax(3-3)
在工程上,考虑滤波余量、传感器性能和 FFT 分辨率,建议采样率适当高于理论下限。对于高速度 CoreXY 系统,若需要观察 4 倍频甚至更高频成分,采样率通常应达到数千赫兹以上。
这里给出一个更具体的选型示例。假设当前测试条件为:
- 目标结构为 CoreXY。
- 打印头速度为 300 mm/s300\ \text{mm/s}300 mm/s。
- 目标分析谐波为 4 倍频。
- 已由上节计算得到 fmax≈2121.2 Hzf_{max}\approx2121.2\ \text{Hz}fmax≈2121.2 Hz。
则不同采样率下的判断如下:
| 采样率 fsf_sfs | 是否满足奈奎斯特 | 结论 |
|---|---|---|
| 1600 Hz1600\ \text{Hz}1600 Hz | 否 | 必然混叠,不能用于该工况 |
| 3200 Hz3200\ \text{Hz}3200 Hz | 否 | 可用于较低频谐波,但不足以覆盖本例 4 倍频 |
| 5000 Hz5000\ \text{Hz}5000 Hz | 是 | 满足基础采样要求,适合进一步做频域分析 |
除采样率外,还应关注 FFT 频率分辨率。若采用 fs=3200 Hzf_s = 3200\ \text{Hz}fs=3200 Hz、N=1024N = 1024N=1024 点 FFT,则频率分辨率为:
Δf=fsN=32001024≈3.125 Hz \Delta f = \frac{f_s}{N} = \frac{3200}{1024} \approx 3.125\ \text{Hz} Δf=Nfs=10243200≈3.125 Hz
该量决定了频谱上相邻频点的间距。若目标峰值恰好位于两个频点之间,仅取单点会低估峰值,因此后续必须配合带宽窗口 ΔfBW\Delta f_{BW}ΔfBW 进行局部峰值提取。
3.5 窗函数与 FFT 处理
为减小有限时窗带来的频谱泄漏,采样序列在 FFT 前应施加窗函数。以汉宁窗为例:
wm=0.5(1−cos2πmN−1)(3-4) wm = 0.5\left(1-\cos\frac{2\pi m}{N-1}\right) \tag{3-4} wm=0.5(1−cosN−12πm)(3-4)
对任一轴向加速度序列 amamam,其频域表示为:
X(k)=∑m=0N−1amwme−j2πNkm(3-5) X(k)=\sum_{m=0}^{N-1} amwme^{-j\frac{2\pi}{N}km} \tag{3-5} X(k)=m=0∑N−1amwme−jN2πkm(3-5)
在实际实现中,通常对 X、Y、Z 三轴分别进行 FFT,再在目标频带上提取幅值特征。
3.6 目标频带窗口设置
由于 FFT 频率分辨率有限,且真实系统存在转速波纹和结构频响展宽,因此不宜只读取单个离散频点。设目标中心频率为 fkf_kfk,则可在窗口
fk−ΔfBW, fk+ΔfBW\] \[f_k-\\Delta f_{BW},\\ f_k+\\Delta f_{BW}\] \[fk−ΔfBW, fk+ΔfBW
内提取局部峰值。ΔfBW\Delta f_{BW}ΔfBW 需要同时满足两点:
- 足以覆盖频率漂移和 FFT 栅栏效应。
- 不至于扩展到相邻谐波频段,引入串扰。
更具体地说,带宽窗口之所以要"配合"采样率和 FFT 一起设定,是因为它本质上是在回答两个问题:
- 目标峰值可能偏离理论频点多少?
- 为了不漏掉这个峰值,至少要在理论频点两侧留多宽的搜索余量?
常见的窗口选取逻辑如下:
- 先由采样率和 FFT 点数确定频率分辨率 Δf=fs/N\Delta f = f_s/NΔf=fs/N。
- 再给窗口设定一个不小于若干个频率分辨率的余量,避免单点漏峰。
- 最后检查窗口是否过宽,避免把邻近谐波或寄生峰一起纳入。
例如,若 fs=3200 Hzf_s=3200\ \text{Hz}fs=3200 Hz、N=1024N=1024N=1024,则:
Δf=3.125 Hz \Delta f = 3.125\ \text{Hz} Δf=3.125 Hz
如果只取理论频点一个 bin,那么目标峰值一旦偏在两个频点之间,就可能被低估。一个更稳妥的做法,是至少保留 3 倍频率分辨率作为下限:
ΔfBW,min≈3Δf≈9.4 Hz \Delta f_{BW,min} \approx 3\Delta f \approx 9.4\ \text{Hz} ΔfBW,min≈3Δf≈9.4 Hz
工程上通常会向上取整到 ±10 Hz\pm 10\ \text{Hz}±10 Hz 或 ±20 Hz\pm 20\ \text{Hz}±20 Hz,用于覆盖以下几类误差:
- FFT 栅栏效应导致的单点偏差。
- 电机实际转速波纹造成的频率轻微漂移。
- 结构共振峰本身不是理想尖峰,而是具有一定展宽。
下面给出一个完整示例。假设理论目标频率为 fk=1500 Hzf_k = 1500\ \text{Hz}fk=1500 Hz,FFT 分辨率仍为 3.125 Hz3.125\ \text{Hz}3.125 Hz。若取:
ΔfBW=20 Hz \Delta f_{BW} = 20\ \text{Hz} ΔfBW=20 Hz
则实际搜索区间为:
1480,1520 Hz 1480,1520\ \text{Hz} 1480,1520 Hz
这意味着算法不会只盯住 1500 Hz 单点,而是会在该区间内寻找局部最大值。若真实峰值由于机械漂移落在 1492 Hz 或 1508 Hz,仍能被窗口正确抓到。
但窗口也不能无限放大。设相邻谐波峰分别位于 1500 Hz 和 1600 Hz,则窗口半宽必须满足:
ΔfBW<1600−15002=50 Hz \Delta f_{BW} < \frac{1600-1500}{2} = 50\ \text{Hz} ΔfBW<21600−1500=50 Hz
否则窗口就有可能越过两个峰之间的分界,把邻近谐波一起纳入,导致搜索目标失真。
因此,可以把带宽窗口理解为"围绕理论频点画一个有限宽度的搜索框"。这个搜索框既要足够宽,防止漏掉真实峰值;又要足够窄,防止抓到不该抓的邻近峰。对轻载步进系统,一个常用且易实现的经验范围是:
- 下限不低于 3Δf3\Delta f3Δf。
- 经验值常取 ±10 Hz\pm 10\ \text{Hz}±10 Hz 到 ±30 Hz\pm 30\ \text{Hz}±30 Hz。
- 上限必须小于相邻谐波间距的一半。
3.7 三轴综合振动代价函数
为避免单轴观测带来的方向偏置,本文采用三轴频域幅值的欧几里得范数构建代价函数:
J(ftarget)=maxk∈fk−ΔfBW, fk+ΔfBW∣X(k)∣2+∣Y(k)∣2+∣Z(k)∣2(3-6) J(f_{target}) = \max_{k \in f_k-\\Delta f_{BW},\\ f_k+\\Delta f_{BW}}\sqrt{|X(k)|^2+|Y(k)|^2+|Z(k)|^2} \tag{3-6} J(ftarget)=k∈fk−ΔfBW, fk+ΔfBWmax∣X(k)∣2+∣Y(k)∣2+∣Z(k)∣2 (3-6)
该定义具有两个优点:
- 对传感器安装方向不敏感,具有较好的旋转不变性。
- 能反映空间整体振动水平,避免单轴最优而整机并不最优的情况。
其数据处理过程可进一步表示为:
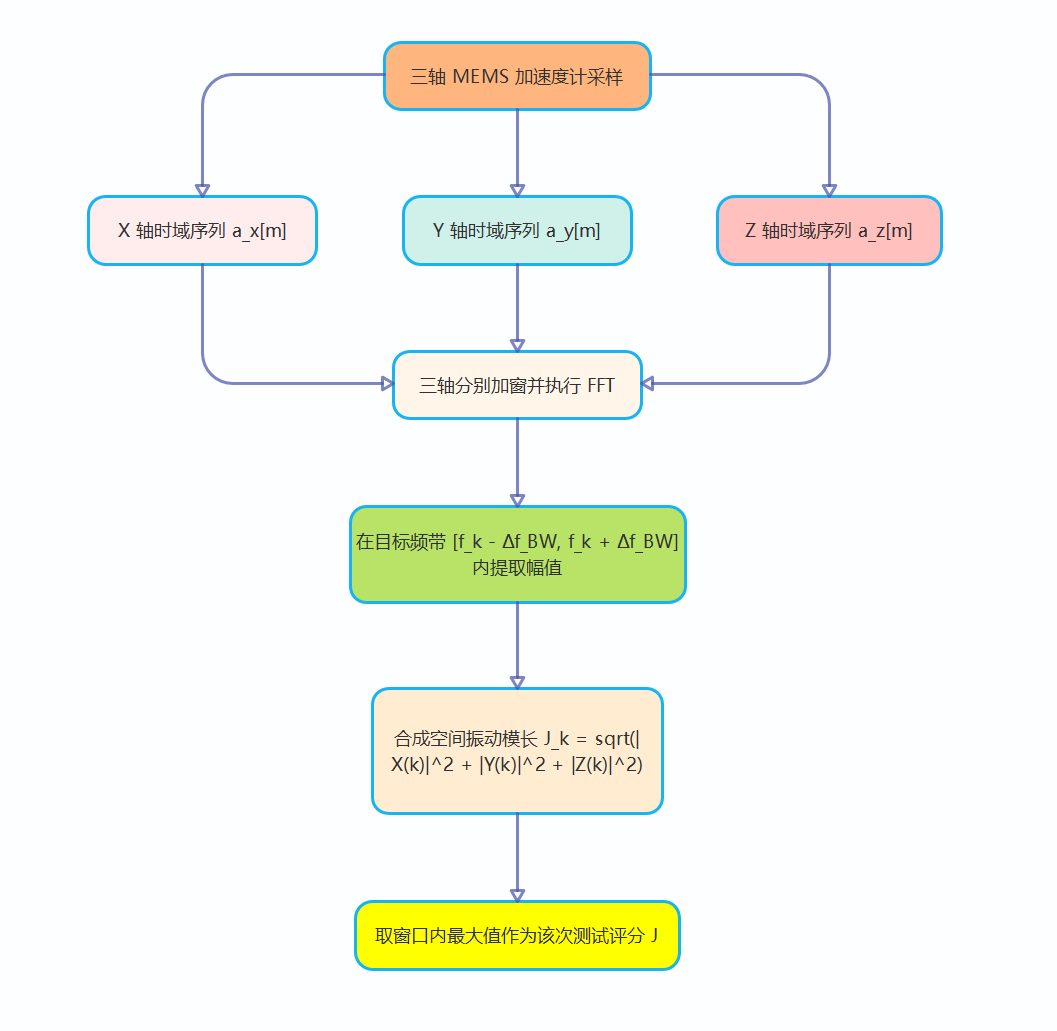
例如,在某次测试中,目标频带内某一点的三轴幅值分别为 ∣X∣=0.8|X|=0.8∣X∣=0.8、∣Y∣=0.6|Y|=0.6∣Y∣=0.6、∣Z∣=0.3|Z|=0.3∣Z∣=0.3,则综合评分为:
J=0.82+0.62+0.32=1.09≈1.044 J = \sqrt{0.8^2+0.6^2+0.3^2} = \sqrt{1.09} \approx 1.044 J=0.82+0.62+0.32 =1.09 ≈1.044
若另一组参数使得三轴幅值变为 0.50.50.5、0.40.40.4、0.20.20.2,则有:
J=0.52+0.42+0.22=0.45≈0.671 J = \sqrt{0.5^2+0.4^2+0.2^2} = \sqrt{0.45} \approx 0.671 J=0.52+0.42+0.22 =0.45 ≈0.671
由于第二组参数对应的 JJJ 更小,因此说明其在空间总体振动抑制上更优。
3.8 本章小结
本章建立了从速度到目标频率、从采样到 FFT、从频域特征到代价函数的完整测量链路。该链路为后续参数搜索提供了可重复、可量化的评价标准。
4. 参数辨识与优化算法
4.1 优化问题定义
给定速度、方向和目标谐波阶次后,需要求解参数对 (A,ϕ)(A,\phi)(A,ϕ),使代价函数 JJJ 最小:
minA,ϕJ(A,ϕ)(4-1) \min_{A,\phi} J(A,\phi) \tag{4-1} A,ϕminJ(A,ϕ)(4-1)
该问题通常是非凸的,且每次评价都需要真实运动和实际采样,因此属于典型的高代价黑盒优化问题。工程上常用两类方法:方案 A 为分步贪心搜索,方案 B 为贝叶斯优化。前者强调实现简单,后者强调全局搜索效率。
4.2 方案 A:分步贪心搜索
方案 A 的核心思想是把二维搜索拆分成两个一维问题:先找相位,再找幅值。这样做的原因是相位对破坏性干涉的影响通常更敏感,先把相位调到接近最优,后续的幅值搜索会更稳定。
4.2.1 第一步:固定幅值,搜索相位
设初始测试幅值为 AinitA_{init}Ainit。在第一步中,算法保持 A=AinitA=A_{init}A=Ainit 不变,只在相位区间内搜索最优的 ϕ\phiϕ。常见做法是先粗扫,再局部细化:
- 以较大步长在 0,2π0,2\\pi0,2π 上扫描,找到若干低谷区域。
- 选择最低谷附近作为局部搜索起点。
- 使用更小步长继续比较,直到相位收敛。
其执行流程可写为:
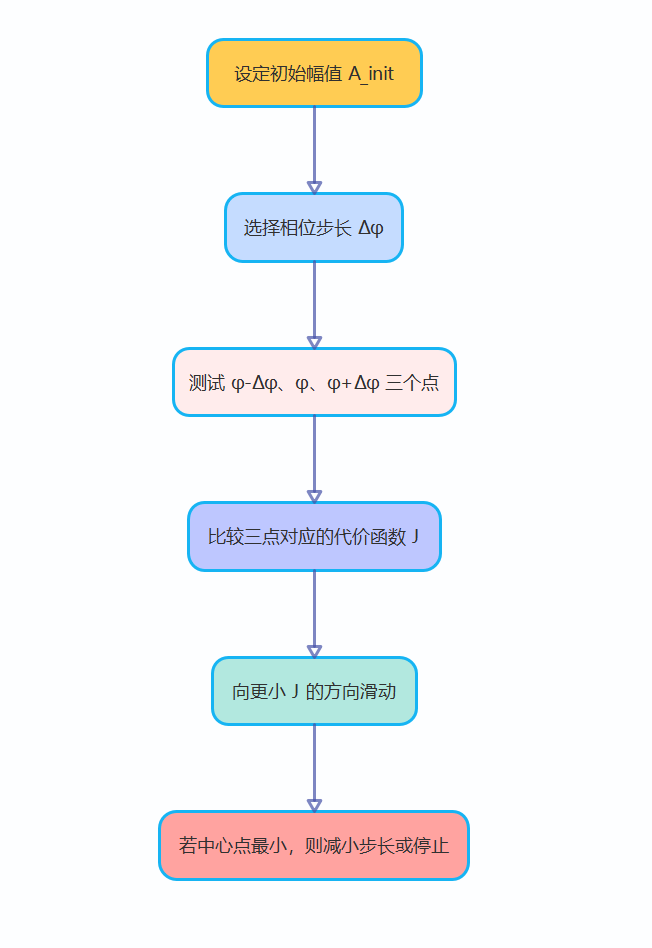
这一步的目标不是立刻得到最终参数对,而是先找到一个足够接近反相抵消条件的相位值 ϕopt\phi_{opt}ϕopt。
4.2.2 第二步:固定相位,搜索幅值
当 ϕopt\phi_{opt}ϕopt 确定后,算法进入第二步。此时相位保持不变,只沿幅值方向搜索 AAA。搜索逻辑与相位完全一致,只是搜索变量换成了补偿幅值:
- 固定 ϕ=ϕopt\phi = \phi_{opt}ϕ=ϕopt。
- 测试 A−ΔAA-\Delta AA−ΔA、AAA、A+ΔAA+\Delta AA+ΔA 三个点。
- 若左侧或右侧更优,则向对应方向滑动。
- 当中心点成为局部最小值时,得到 AoptA_{opt}Aopt。
从物理意义上看,若相位已经接近最优,则改变幅值就是在判断"补偿过小、刚好合适还是补偿过大"。因此这一阶段通常比相位搜索更容易收敛。
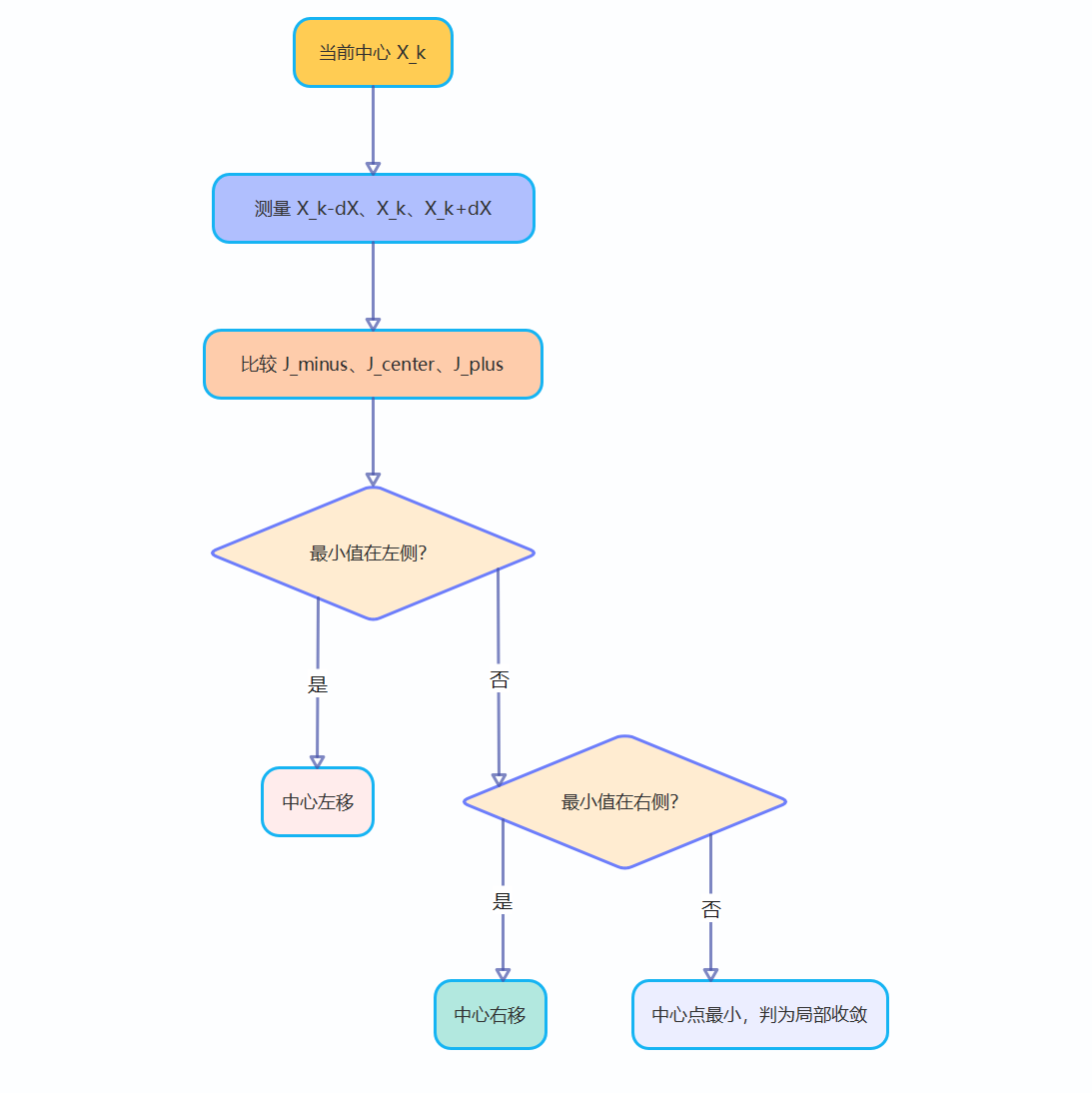
4.2.3 STEP_SLIDE 的三点滑动机制
无论优化变量是 ϕ\phiϕ 还是 AAA,底层都可以统一用三点滑动法实现。设当前搜索中心为 XkX_kXk,步长为 dXdXdX,则测试三点:
- Xk−dX→JminusX_k-dX \rightarrow J_{minus}Xk−dX→Jminus
- Xk→JcenterX_k \rightarrow J_{center}Xk→Jcenter
- Xk+dX→JplusX_k+dX \rightarrow J_{plus}Xk+dX→Jplus
其判据如下:
- 若 JminusJ_{minus}Jminus 最小,说明更优点在左侧。
- 若 JplusJ_{plus}Jplus 最小,说明更优点在右侧。
- 若 JcenterJ_{center}Jcenter 最小,说明当前已落入局部谷底。
可以将它理解为"离散版梯度下降",只不过不显式计算导数,而是直接通过三次真实测量判断下降方向。
4.2.4 方案 A 的工程例子
假设某一速度点下,当前固定幅值为 A=30A=30A=30,搜索相位。若测试结果为:
- ϕ=0∘→J=10.0\phi=0^\circ \rightarrow J=10.0ϕ=0∘→J=10.0
- ϕ=10∘→J=9.2\phi=10^\circ \rightarrow J=9.2ϕ=10∘→J=9.2
- ϕ=−10∘→J=10.5\phi=-10^\circ \rightarrow J=10.5ϕ=−10∘→J=10.5
由于右侧点最小,说明更优相位在正方向。随后继续测试 20∘20^\circ20∘、30∘30^\circ30∘ 直到 90∘90^\circ90∘ 附近。如果测得:
- ϕ=90∘→J=4.0\phi=90^\circ \rightarrow J=4.0ϕ=90∘→J=4.0
- ϕ=100∘→J=4.2\phi=100^\circ \rightarrow J=4.2ϕ=100∘→J=4.2
则可判断最优相位位于 90∘90^\circ90∘ 附近。再固定该相位搜索幅值。若依次得到:
- A=40→J=3.8A=40 \rightarrow J=3.8A=40→J=3.8
- A=50→J=2.6A=50 \rightarrow J=2.6A=50→J=2.6
- A=60→J=2.0A=60 \rightarrow J=2.0A=60→J=2.0
- A=70→J=2.4A=70 \rightarrow J=2.4A=70→J=2.4
则说明最优幅值位于 A=60A=60A=60 附近,最终得到参数对 (Aopt,ϕopt)=(60,90∘)(A_{opt},\phi_{opt})=(60,90^\circ)(Aopt,ϕopt)=(60,90∘)。
方案 A 的优点是计算量低、容易下沉到 MCU;缺点是如果初始点靠近伪局部极小值,就可能收敛到局部最优而不是全局最优。
4.3 方案 B:贝叶斯优化
当系统具备上位机算力时,可采用贝叶斯优化对 (A,ϕ)(A,\phi)(A,ϕ) 联合求解。与方案 A 不同,方案 B 不先拆分变量,而是把二维参数空间整体看作一个待搜索平面,再用代理模型预测哪些区域最值得继续测试。
4.3.1 基本流程
贝叶斯优化通常包含以下四步:
- 先在参数空间内选少量点做初始测试。
- 用这些真实样本建立代理模型,例如高斯过程模型。
- 用采集函数在"去已知低谷附近继续细找"和"去未知区域继续探索"之间做平衡。
- 选择新的测试点,执行真实测量,再更新模型。
其流程可以概括为:
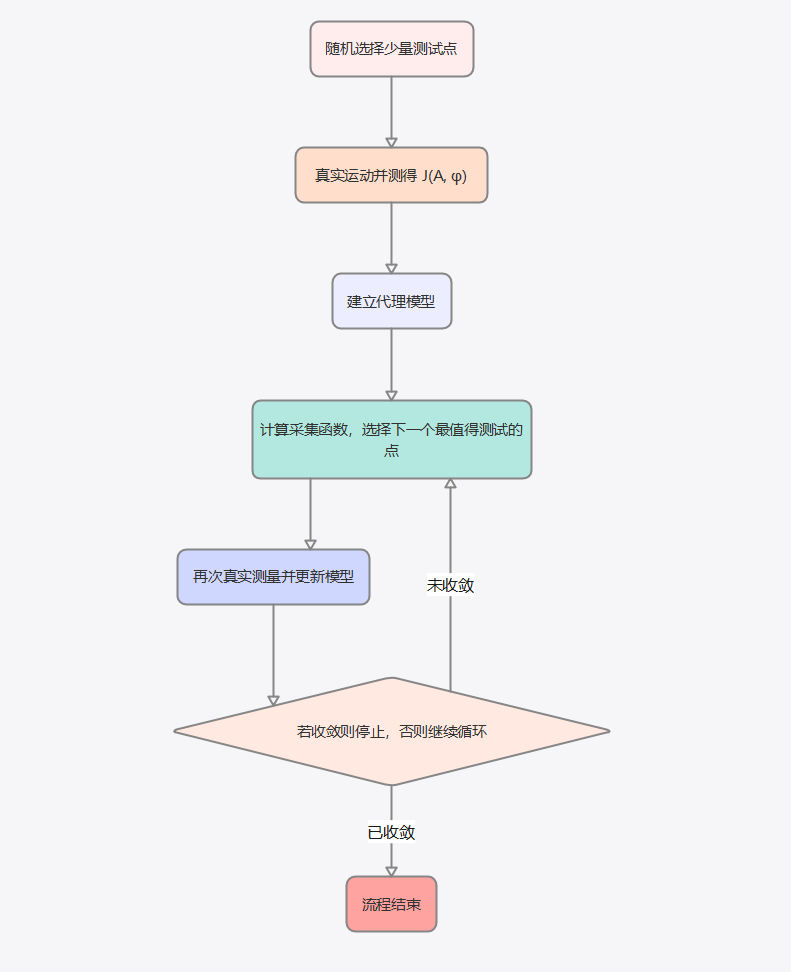
这种方法的关键优势在于,每一次新测试都不是盲试,而是利用已有样本信息做"最有价值的一次试探"。
4.3.2 方案 B 的工程例子
仍以上节的同一速度点为例,假设真实最优点位于 (60,90∘)(60,90^\circ)(60,90∘),但系统并不知道。贝叶斯优化可能先随机选取三组样本:
- (0,0∘)→J=10.0(0,0^\circ) \rightarrow J=10.0(0,0∘)→J=10.0
- (100,180∘)→J=15.0(100,180^\circ) \rightarrow J=15.0(100,180∘)→J=15.0
- (50,−90∘)→J=5.5(50,-90^\circ) \rightarrow J=5.5(50,−90∘)→J=5.5
此时模型会认为第三个点附近较优,但右上区域样本极少、不确定性很高。采集函数综合"低均值"和"高方差"后,可能选择 (55,80∘)(55,80^\circ)(55,80∘) 作为下一次测试点。若真实测得:
(55,80∘)→J=2.5 (55,80^\circ) \rightarrow J=2.5 (55,80∘)→J=2.5
则模型会迅速把低谷区域收缩到该点附近。随后再测试:
(60,90∘)→J=2.0 (60,90^\circ) \rightarrow J=2.0 (60,90∘)→J=2.0
即可定位真正最优点。和方案 A 相比,方案 B 往往能用更少的测试次数避开伪局部极小值,但前提是系统具备更高的软件复杂度和计算资源。
4.4 两类方法的工程比较
| 比较项 | 方案 A:分步贪心搜索 | 方案 B:贝叶斯优化 |
|---|---|---|
| 搜索变量处理 | 先相位后幅值,分两步 | 幅值与相位联合搜索 |
| 计算资源 | 低 | 中到高 |
| 实现复杂度 | 低 | 高 |
| 对初值敏感性 | 高 | 低 |
| 局部最优风险 | 较高 | 较低 |
| 物理测试次数 | 中等 | 通常更少 |
| 典型部署位置 | MCU 本地标定 | 上位机辅助标定 |
| 适用场景 | 快速、低成本、可接受局部解 | 追求更高精度和更少试次 |
4.5 本章小结
本章将参数辨识归纳为非凸黑盒优化问题,并给出了两类典型解法。方案 A 适合嵌入式控制器上的低成本实现,方案 B 更适合上位机参与的高效全局标定。对而言,可以把两者理解为"简单但可能卡在局部谷底"和"更聪明但实现更复杂"这两类典型工程取舍。
5. 全速域标定与参数插值
5.1 离散速度节点标定
由于不同速度会激发不同频段的结构模态,单一参数对无法覆盖整个速度范围。因此,应在多个速度节点分别完成参数标定。例如,对速度集合
V={±50, ±100, ±150, ..., ±300} mm/s \mathcal{V}=\{\pm 50,\ \pm100,\ \pm150,\ \dots,\ \pm300\}\ \text{mm/s} V={±50, ±100, ±150, ..., ±300} mm/s
中的每个点,分别求得对应的最优参数 (Aopt,ϕopt)(A_{opt},\phi_{opt})(Aopt,ϕopt),并形成带方向信息的查找表。
一个适合教学和实现的离散打点流程如下:
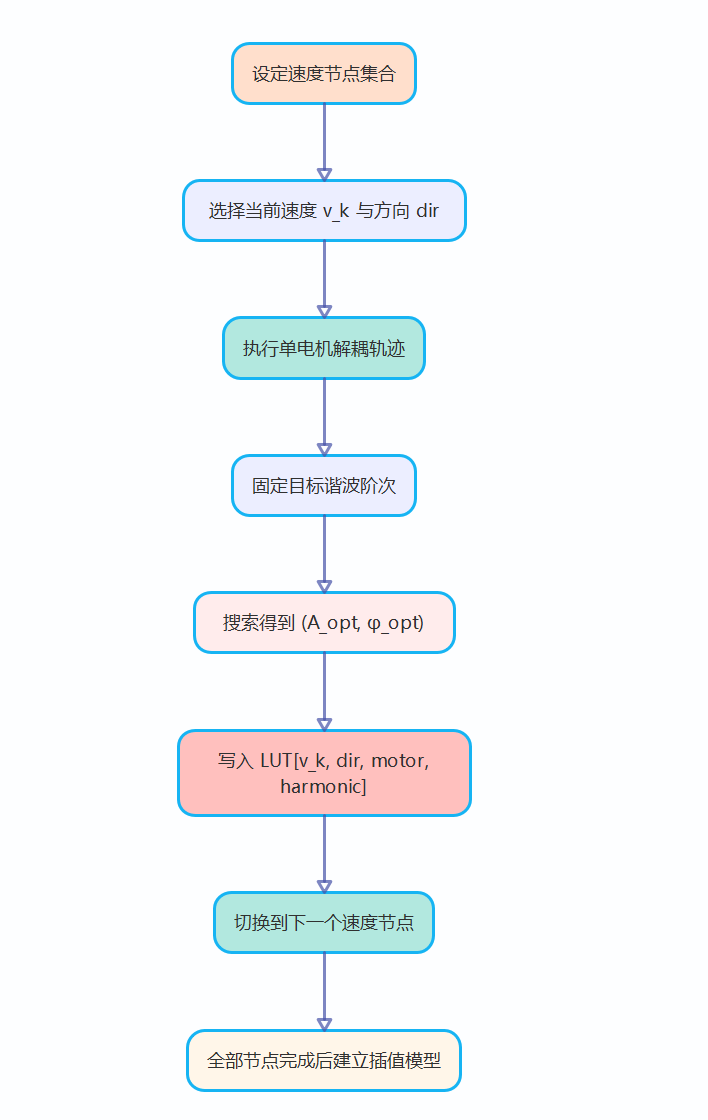
这样得到的不是单个最优点,而是一张随速度和方向变化的参数地图。在线运行时,控制器从这张地图上读取或插值出当前所需补偿量。
5.2 方法 A:一阶线性插值
当实际运行速度 vvv 位于相邻节点 vk,vk+1v_k,v_{k+1}vk,vk+1 之间时,可先采用一阶线性插值。该方法默认参数在两个已知节点之间近似线性变化,优点是实现简单,适合 MCU 实时运算。
α=v−vkvk+1−vk,α∈0,1(5-1) \alpha = \frac{v-v_k}{v_{k+1}-v_k},\qquad \alpha\in0,1 \tag{5-1} α=vk+1−vkv−vk,α∈0,1(5-1)
A(v)=(1−α)Ak+αAk+1(5-2) A(v)=(1-\alpha)A_k+\alpha A_{k+1} \tag{5-2} A(v)=(1−α)Ak+αAk+1(5-2)
ϕ(v)=ϕk+α(ϕk+1−ϕk)(5-3) \phi(v)=\phi_k+\alpha(\phi_{k+1}-\phi_k) \tag{5-3} ϕ(v)=ϕk+α(ϕk+1−ϕk)(5-3)
其执行步骤可以概括为:先找到相邻速度节点,再计算权重 α\alphaα,最后分别对幅值与相位做线性过渡。该方法实现最简单,但在节点交界处导数不连续,动态性能一般。
5.3 方法 B:最小二乘全局拟合
若希望以较少参数描述整段速度范围,可对幅值或相位分别拟合多项式。该方法的思路不是"通过每一个点",而是"寻找整体误差最小的一条平滑曲线"。例如:
A(v)=p0+p1v+p2v2+⋯+pMvM(5-4) A(v)=p_0+p_1v+p_2v^2+\cdots+p_Mv^M \tag{5-4} A(v)=p0+p1v+p2v2+⋯+pMvM(5-4)
通过最小化残差平方和:
minp0,...,pM∑i=1K(A(vi)−Ameasured(vi))2(5-5) \min_{p_0,\dots,p_M}\sum_{i=1}^{K}\left(A(v_i)-A_{measured}(v_i)\right)^2 \tag{5-5} p0,...,pMmini=1∑K(A(vi)−Ameasured(vi))2(5-5)
得到全局拟合系数。若采用一阶拟合 y=kv+by = kv + by=kv+b,则斜率和截距可由下式求得:
k=n∑viyi−∑vi∑yin∑vi2−(∑vi)2 k = \frac{n\sum v_iy_i - \sum v_i\sum y_i}{n\sum v_i^2-(\sum v_i)^2} k=n∑vi2−(∑vi)2n∑viyi−∑vi∑yi
b=∑yi−k∑vin b = \frac{\sum y_i-k\sum v_i}{n} b=n∑yi−k∑vi
其中,yiy_iyi 可以表示幅值数据,也可以表示相位数据。该方法计算平滑,但不一定穿过所有标定点,可能牺牲局部精度。若系统参数随速度变化较平缓,它可以显著压缩存储量;若真实曲线存在局部陡变,则可能出现欠拟合。
5.4 方法 C:三次样条插值
若要求插值结果经过所有测点,同时在节点处保持较高平滑性,可采用三次样条插值。对区间 vk,vk+1v_k,v_{k+1}vk,vk+1 构造:
Sk(v)=ak+bk(v−vk)+ck(v−vk)2+dk(v−vk)3(5-6) S_k(v)=a_k+b_k(v-v_k)+c_k(v-v_k)^2+d_k(v-v_k)^3 \tag{5-6} Sk(v)=ak+bk(v−vk)+ck(v−vk)2+dk(v−vk)3(5-6)
并在拼接节点上满足函数值、一阶导数和二阶导数连续。若采用自然边界条件,则端点二阶导数取零。对于只有 3 个等距节点的教学示例,样条求解可以简化为先求二阶导数参数 M1,M2,M3M_1,M_2,M_3M1,M2,M3,再代回分段公式求目标点的函数值。该方法通常比线性插值更平滑,也比高阶全局多项式更稳定,因此更适合作为工程实现方案。
5.5 相位解卷绕处理
相位是模 2π2\pi2π 变量,直接拟合或插值可能在 000 与 2π2\pi2π 的边界产生跳变。因此在方法 B 和方法 C 中,通常都应先进行解卷绕:
ϕunwrap(k)=ϕunwrap(k−1)+wrapToPi(ϕmeasured(k)−ϕunwrap(k−1))(5-7) \phi_{unwrap}(k)=\phi_{unwrap}(k-1)+\operatorname{wrapToPi}\left(\phi_{measured}(k)-\phi_{unwrap}(k-1)\right) \tag{5-7} ϕunwrap(k)=ϕunwrap(k−1)+wrapToPi(ϕmeasured(k)−ϕunwrap(k−1))(5-7)
拟合完成后再对输出取模还原。该步骤对相位拟合和插值的稳定性十分关键。
5.6 三种方法的演算实例
设已标定得到三组数据:
| 速度 vvv | 幅值 AAA | 相位 ϕ\phiϕ |
|---|---|---|
| 100 mm/s100\ \text{mm/s}100 mm/s | 50 | 30∘30^\circ30∘ |
| 150 mm/s150\ \text{mm/s}150 mm/s | 80 | 70∘70^\circ70∘ |
| 200 mm/s200\ \text{mm/s}200 mm/s | 100 | 120∘120^\circ120∘ |
若当前运行速度为 130 mm/s130\ \text{mm/s}130 mm/s,下面分别演示方法 A、B、C 的求解过程。
演算 1:方法 A
线性插值权重为:
α=130−100150−100=0.6 \alpha = \frac{130-100}{150-100}=0.6 α=150−100130−100=0.6
因此幅值与相位分别为:
A(130)=50+0.6×(80−50)=68 A(130)=50+0.6\times(80-50)=68 A(130)=50+0.6×(80−50)=68
ϕ(130)=30∘+0.6×(70∘−30∘)=54∘ \phi(130)=30^\circ+0.6\times(70^\circ-30^\circ)=54^\circ ϕ(130)=30∘+0.6×(70∘−30∘)=54∘
结论是:方法 A 得到 A(130)=68A(130)=68A(130)=68、ϕ(130)=54∘\phi(130)=54^\circϕ(130)=54∘。它最容易实现,但相邻区间拼接时会形成折线。
演算 2:方法 B
为了便于手工计算,设采用一阶全局拟合 y=kv+by = kv + by=kv+b。下面分别对幅值和相位求拟合直线。
第一步,先处理幅值数据 (100,50)(100,50)(100,50)、(150,80)(150,80)(150,80)、(200,100)(200,100)(200,100)。令 n=3n=3n=3,则:
∑vi=100+150+200=450 \sum v_i = 100+150+200 = 450 ∑vi=100+150+200=450
∑vi2=1002+1502+2002=72500 \sum v_i^2 = 100^2+150^2+200^2 = 72500 ∑vi2=1002+1502+2002=72500
∑Ai=50+80+100=230 \sum A_i = 50+80+100 = 230 ∑Ai=50+80+100=230
∑viAi=100×50+150×80+200×100=37000 \sum v_iA_i = 100\times50 + 150\times80 + 200\times100 = 37000 ∑viAi=100×50+150×80+200×100=37000
代入上面的斜率与截距公式,可得:
kA=3×37000−450×2303×72500−4502=111000−103500217500−202500=750015000=0.5 k_A = \frac{3\times37000 - 450\times230}{3\times72500 - 450^2} = \frac{111000 - 103500}{217500 - 202500} = \frac{7500}{15000} = 0.5 kA=3×72500−45023×37000−450×230=217500−202500111000−103500=150007500=0.5
bA=230−0.5×4503=53≈1.67 b_A = \frac{230 - 0.5\times450}{3} = \frac{5}{3} \approx 1.67 bA=3230−0.5×450=35≈1.67
因此幅值拟合直线为:
A(v)≈0.5v+1.67 A(v) \approx 0.5v + 1.67 A(v)≈0.5v+1.67
代入 v=130v=130v=130,得到:
A(130)≈0.5×130+1.67=66.67 A(130) \approx 0.5\times130 + 1.67 = 66.67 A(130)≈0.5×130+1.67=66.67
第二步,再处理相位数据 (100,30∘)(100,30^\circ)(100,30∘)、(150,70∘)(150,70^\circ)(150,70∘)、(200,120∘)(200,120^\circ)(200,120∘)。此时:
∑ϕi=30+70+120=220 \sum \phi_i = 30+70+120 = 220 ∑ϕi=30+70+120=220
∑viϕi=100×30+150×70+200×120=37500 \sum v_i\phi_i = 100\times30 + 150\times70 + 200\times120 = 37500 ∑viϕi=100×30+150×70+200×120=37500
代入同样的公式,有:
kϕ=3×37500−450×22015000=112500−9900015000=0.9 k_{\phi} = \frac{3\times37500 - 450\times220}{15000} = \frac{112500 - 99000}{15000} = 0.9 kϕ=150003×37500−450×220=15000112500−99000=0.9
bϕ=220−0.9×4503=−61.67 b_{\phi} = \frac{220 - 0.9\times450}{3} = -61.67 bϕ=3220−0.9×450=−61.67
因此相位拟合直线为:
ϕ(v)≈0.9v−61.67 \phi(v) \approx 0.9v - 61.67 ϕ(v)≈0.9v−61.67
代入后有:
ϕ(130)≈0.9×130−61.67=55.33∘ \phi(130) \approx 0.9\times130 - 61.67 = 55.33^\circ ϕ(130)≈0.9×130−61.67=55.33∘
方法 B 的特点是结果整体平滑,但它不保证经过全部原始测点,因此更适合曲线总体趋势稳定、且希望降低存储量的场景。
演算 3:方法 C
若采用三次样条插值,则会在区间 100,150100,150100,150 上构造一段三次多项式,并保证与相邻区间在一阶、二阶导数上连续。为了能够手工跟算,这里采用 3 个等距节点、自然边界条件的最简情形。
第一步,定义等距步长:
h=150−100=50 h = 150-100 = 50 h=150−100=50
自然边界条件意味着:
M1=0,M3=0 M_1 = 0, \qquad M_3 = 0 M1=0,M3=0
对 3 个等距节点,内部节点的二阶导数满足:
M1+4M2+M3=6h2(y1−2y2+y3) M_1 + 4M_2 + M_3 = \frac{6}{h^2}(y_1 - 2y_2 + y_3) M1+4M2+M3=h26(y1−2y2+y3)
第二步,先对幅值数据 50,80,10050,80,10050,80,100 求 M2M_2M2。有:
y1−2y2+y3=50−2×80+100=−10 y_1 - 2y_2 + y_3 = 50 - 2\times80 + 100 = -10 y1−2y2+y3=50−2×80+100=−10
4M2=62500(−10)=−0.024 4M_2 = \frac{6}{2500}(-10) = -0.024 4M2=25006(−10)=−0.024
M2=−0.006 M_2 = -0.006 M2=−0.006
第三步,定义目标点在区间 100,150100,150100,150 上的左右权重:
λ=150−13050=0.4,t=130−10050=0.6 \lambda = \frac{150-130}{50} = 0.4, \qquad t = \frac{130-100}{50} = 0.6 λ=50150−130=0.4,t=50130−100=0.6
于是样条函数可写为:
SA(130)=M1h26λ3+M2h26t3+(A1−M1h26)λ+(A2−M2h26)t S_A(130)=M_1\frac{h^2}{6}\lambda^3 + M_2\frac{h^2}{6}t^3 + \left(A_1-M_1\frac{h^2}{6}\right)\lambda + \left(A_2-M_2\frac{h^2}{6}\right)t SA(130)=M16h2λ3+M26h2t3+(A1−M16h2)λ+(A2−M26h2)t
因为 M1=0M_1=0M1=0,且
M2h26=−0.006×25006=−2.5 M_2\frac{h^2}{6} = -0.006\times\frac{2500}{6} = -2.5 M26h2=−0.006×62500=−2.5
所以:
SA(130)=(−2.5)(0.6)3+50(0.4)+(80+2.5)(0.6) S_A(130)=(-2.5)(0.6)^3 + 50(0.4) + (80+2.5)(0.6) SA(130)=(−2.5)(0.6)3+50(0.4)+(80+2.5)(0.6)
SA(130)=−2.5×0.216+20+82.5×0.6=−0.54+20+49.5=68.96 S_A(130)= -2.5\times0.216 + 20 + 82.5\times0.6 = -0.54 + 20 + 49.5 = 68.96 SA(130)=−2.5×0.216+20+82.5×0.6=−0.54+20+49.5=68.96
第四步,对相位数据 30∘,70∘,120∘30^\circ,70^\circ,120^\circ30∘,70∘,120∘ 做同样处理。此时:
y1−2y2+y3=30−2×70+120=10 y_1 - 2y_2 + y_3 = 30 - 2\times70 + 120 = 10 y1−2y2+y3=30−2×70+120=10
4M2ϕ=62500(10)=0.024 4M_2^{\phi} = \frac{6}{2500}(10) = 0.024 4M2ϕ=25006(10)=0.024
M2ϕ=0.006 M_2^{\phi} = 0.006 M2ϕ=0.006
进一步有:
M2ϕh26=0.006×25006=2.5 M_2^{\phi}\frac{h^2}{6} = 0.006\times\frac{2500}{6} = 2.5 M2ϕ6h2=0.006×62500=2.5
所以相位样条值为:
Sϕ(130)=2.5(0.6)3+30(0.4)+(70−2.5)(0.6) S_{\phi}(130)=2.5(0.6)^3 + 30(0.4) + (70-2.5)(0.6) Sϕ(130)=2.5(0.6)3+30(0.4)+(70−2.5)(0.6)
Sϕ(130)=2.5×0.216+12+67.5×0.6=0.54+12+40.5=53.04∘ S_{\phi}(130)= 2.5\times0.216 + 12 + 67.5\times0.6 = 0.54 + 12 + 40.5 = 53.04^\circ Sϕ(130)=2.5×0.216+12+67.5×0.6=0.54+12+40.5=53.04∘
因此,方法 C 的结果为:
A(130)=68.96,ϕ(130)=53.04∘ A(130)=68.96, \qquad \phi(130)=53.04^\circ A(130)=68.96,ϕ(130)=53.04∘
该结果的价值在于,它不仅接近原始测点趋势,而且在速度连续变化时具有更平滑的一阶、二阶导数特性。
三种方法的比较
| 方法 | 是否经过全部测点 | 平滑性 | 实现难度 | 适用场景 |
|---|---|---|---|---|
| 方法 A:线性插值 | 是 | 一般 | 低 | MCU 实时计算、快速验证 |
| 方法 B:全局拟合 | 否 | 高 | 中 | 参数压缩、总体趋势建模 |
| 方法 C:三次样条 | 是 | 高 | 中 | 在线控制、兼顾精度与平滑性 |
5.7 本章小结
本章说明了为什么必须进行全速域离散标定,并比较了三类常用过渡方法。综合精度、平滑性与实现复杂度,三次样条插值通常是更均衡的工程选择。
6. 工程实现建议
6.1 标定流程建议
为保证标定结果可复现,建议采用以下流程:
- 固定传感器安装位置和安装方向。
- 按架构选择单电机解耦轨迹。
- 对每个速度节点分别进行正向和反向标定。
- 每个测试点重复采样多次,并取统计稳定值。
- 对异常点进行复测,而不是直接参与插值。
6.2 在线运行流程
在线运行时,控制器可按照以下顺序工作:
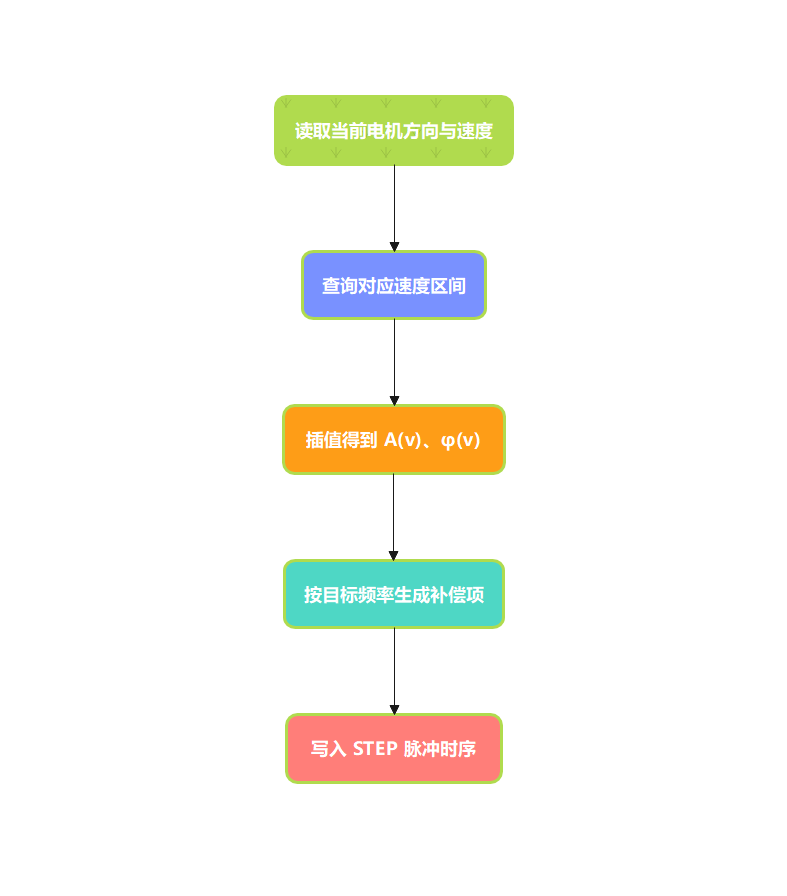
该流程适合在主控固件中以查表加轻量插值的方式实现,实时开销较低。
6.3 参数存储与维护
建议将正反向参数、不同电机参数以及不同谐波阶次参数分开存储,避免查询逻辑混乱。若设备经过以下操作,应考虑重新标定:
- 更换电机、驱动器或皮带轮。
- 调整皮带张力或导轨预紧。
- 明显改变平台负载。
- 机架结构件拆装后重新组装。
6.4 误差来源与调试建议
工程调试中常见误差来源包括:
- 传感器安装不牢,导致高频响应失真。
- 采样率不足,引起混叠。
- 解耦轨迹选择不当,导致多电机串扰。
- 速度节点过稀,导致在线补偿过渡不准。
- 相位插值未解卷绕,造成跨界跳变。
因此,调试优先级通常应为:先保证测量链路可信,再优化搜索策略,最后优化插值模型。
6.5 本章小结
本章从落地实施角度给出了标定、存储、在线调用与调试建议。对于多数开环步进平台,可靠的测量与清晰的参数管理往往比复杂算法更重要。
7. 方案评估与结论
7.1 与闭环 FOC 谐波补偿的比较
| 比较项 | 本文方法 | 典型闭环 FOC 补偿 |
|---|---|---|
| 控制对象 | STEP 脉冲时序 | 电流环或转矩环 |
| 依赖硬件 | 低 | 高 |
| 实施位置 | 运动指令发送端 | 驱动内部闭环 |
| 适用系统 | 开环步进平台 | 伺服或高性能闭环系统 |
| 全速域覆盖能力 | 依赖多速度节点标定和插值,可覆盖常用速度范围 | 依赖闭环反馈,可在连续速度范围内实时调节 |
| 实时性 | 在线查表和调制开销低,但参数更新主要依赖离线模型 | 在线补偿能力强,但要求控制器和采样链路具备较高实时带宽 |
| 在线适应能力 | 一般 | 较强 |
本文方法的优势在于硬件成本低、部署门槛低、可兼容大量现有开源控制平台;不足在于全速域覆盖主要依赖离线速度节点密度,实时更新能力弱于 FOC 类闭环系统。换言之,本文方法更像"先标定、后调用"的前馈方案,而 FOC 更像"边运行、边修正"的在线反馈方案。
7.2 工程局限性
本文方案的主要限制如下:
- 补偿参数依赖离线标定,难以完全应对长期漂移。
- 全速域标定时间较长,特别是在双向、多电机、多谐波条件下。
- 对高加速度瞬态工况,静态速度节点插值无法完全描述真实动态响应。
- 若系统已经具备高带宽闭环控制,则本文方法的收益可能下降,甚至与原有控制环冲突。
7.3 结论
本文围绕开环步进系统的谐波噪声问题,构建了一套基于步进脉冲相位调制的前馈降噪方法。通过建立谐波机理模型、设计三轴振动测量与频域评价方法、引入参数辨识算法,并结合全速域标定与插值策略,形成了从理论到工程实现的完整技术链路。
从工程角度看,该方法特别适合硬件预算有限、但希望显著改善高速运行噪声的运动平台。若后续能够结合在线状态估计、自适应更新或更精细的动态模型,其应用范围和稳定性仍有进一步提升空间。