目录
[一、核心控制原理:单片机如何通过 LED 驱动芯片控制 LED 点阵?](#一、核心控制原理:单片机如何通过 LED 驱动芯片控制 LED 点阵?)
[二、带载能力:怎么确定最多能接多少颗 LED?](#二、带载能力:怎么确定最多能接多少颗 LED?)
[三、单片机 IO 口参数:IO 口的电流电压是多少?能直接驱动 LED 吗?](#三、单片机 IO 口参数:IO 口的电流电压是多少?能直接驱动 LED 吗?)
[四、通信方式:单片机常用通信方式有哪些?为什么选 SPI/I2C?](#四、通信方式:单片机常用通信方式有哪些?为什么选 SPI/I2C?)
[五、LED 参数:普通发光二极管的电流电压是多少?](#五、LED 参数:普通发光二极管的电流电压是多少?)
[七、灰度、亮度、功耗:如何控制 LED 的灰度级、亮度和功耗?](#七、灰度、亮度、功耗:如何控制 LED 的灰度级、亮度和功耗?)
速背版本
一、核心控制原理:单片机如何通过 LED 驱动芯片控制 LED 点阵?
单片机通过SPI/I2C 等通信方式 ,把 LED 的亮灭 / 灰度数据发给驱动芯片;驱动芯片接收数据后,通过行 / 列扫描或恒流驱动,按地址选通对应 LED 并输出电流,实现点阵的点亮与显示。
二、带载能力:怎么确定最多能接多少颗 LED?
- 看驱动芯片的总电流 / 通道电流上限,比如单通道最大电流 × 通道数;
- 看电源总功率 / 电流,避免过流导致压降;
- 看扫描方式(静态 / 动态),动态扫描会分摊电流,实际能接的 LED 数量更多。
三、单片机 IO 口参数:IO 口的电流电压是多少?能直接驱动 LED 吗?
- 电压:通常为 3.3V 或 5V(和单片机供电一致);
- 电流:灌 / 拉电流通常只有几 mA~ 几十 mA,远小于 LED 所需电流;
- 结论:不能直接驱动,必须加限流电阻或驱动芯片,否则会烧 IO 口或 LED 亮度不足。
四、通信方式:单片机常用通信方式有哪些?为什么选 SPI/I2C?
- 常用方式:SPI、I2C、UART、1-Wire、CAN 等;
- 选 SPI/I2C 的原因:引脚少、布线简单、速率足够,能高效传输 LED 点阵的显示数据,SPI 速率更高适合高速刷新,I2C 适合低成本多设备扩展。
五、LED 参数:普通发光二极管的电流电压是多少?
- 正向电压(VF):红 / 黄 / 橙约 1.8~2.2V,绿 / 蓝 / 白约 2.8~3.3V;
- 工作电流(IF):典型值5~20mA,最大不超过 30mA,超过会烧毁 LED。
六、驱动芯片电流:驱动芯片输出电流是多少?怎么控制?
- 输出电流:单通道通常几 mA~ 几十 mA,比如常见的恒流驱动芯片单通道可设 5~20mA;
- 控制方式:通过限流电阻、PWM 信号、寄存器配置设置恒流值,或通过调整供电电压间接控制电流。
七、灰度、亮度、功耗:如何控制 LED 的灰度级、亮度和功耗?
- 灰度 / 亮度:通过PWM 占空比调节(亮灭时间比例),占空比越高越亮,也可通过调整驱动电流实现;
- 功耗:由 LED 电流 × 电压 × 占空比决定,降低占空比或电流、关闭不亮的 LED,就能降低整体功耗。
详细解析
前方内容过于基础 + 详细,
请放下你的急性子,耐着性子慢慢啃。
囫囵吞枣的话,知识点会 "消化不良",看了也白看哦😜
一、核心控制原理:单片机如何通过LED驱动芯片控制 LED 点阵?
1.整体架构(必背) 单片机不直接驱动 LED,采用 "三层分离" 架构,分工明确: 指令层 :单片机通过 SPI、I2C、类 I2C、UART 等串行通信方式,向驱动芯片发送配置指令和显示数据。
驱动层:驱动芯片收到指令后,内部解析并控制行、列通路的通断,实现 LED 点亮。
**供电层:**所有 LED 的电能全部来自外部独立 5V 电源,驱动芯片负责恒流输出。
2.具体工作原理,
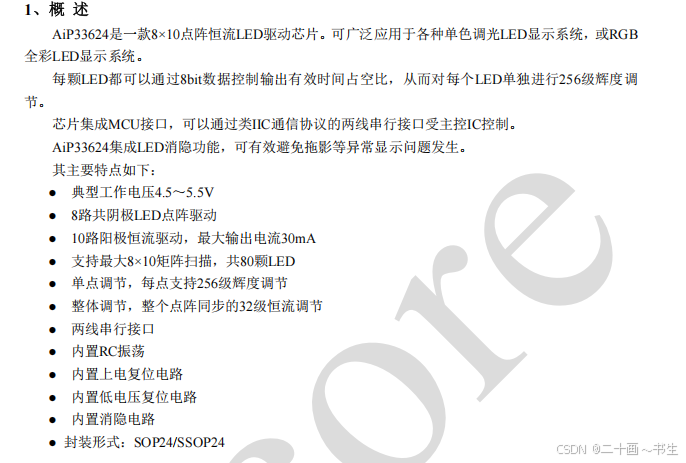
以用过的 AiP33624 共阴极 8×10 点阵驱动芯片为例:
SEG 引脚(10 路):接 LED 阳极,做恒流输出,给 LED 提供稳定工作电流。
GRID 引脚(8 路):接 LED 阴极,做行扫描选通。
采用动态扫描方式:同一时间只有 1 行 GRID 导通,芯片快速切换不同行(每秒几十上百次),利用人眼视觉暂留,看起来整屏都是常亮的。
3.关键补充 1(面试加分:为什么必须用专用 LED 驱动芯片,不直接用单片机 IO 驱动?)
正常情况下不建议单片机 IO 口直接驱动 LED 点阵,使用驱动芯片主要有 5 个原因:
① IO 口带载能力不足:单片机普通 IO、通信引脚电流仅有几毫安,而单颗 LED 工作电流普遍 15~20mA,点阵多灯同时工作时电流更大,直接驱动会烧毁单片机引脚。
② 实现恒流驱动:LED 是电流型器件,电压波动会造成亮度不均、灯珠损坏。专用驱动芯片自带恒流功能,能稳定输出电流,保证所有 LED 亮度一致、延长使用寿命。
③ 节省单片机引脚:8×10 点阵有 80 颗灯,若用单片机 IO 直接控制,需要占用十几甚至几十个引脚;使用驱动芯片仅需 2~4 根通信线,大幅节约引脚资源,简化硬件电路。
④ 实现动态扫描与灰度:驱动芯片内置扫描时序、PWM 调光电路,可自动完成行切换、256 级灰度显示,单片机只需下发数据,不用频繁干预,降低主控负担。
⑤ 提升抗干扰与稳定性:驱动芯片隔离了大功率 LED 回路和单片机信号回路,避免大电流产生的干扰影响主控正常工作,同时芯片自带上电复位、消隐等功能,防止画面乱闪、拖影。
4.关键补充 2
单片机的通信引脚(SCLK、DIN)只传输数字控制信号,电流只有微安级,完全不承担 LED 的功率负载,和 LED 供电回路相互隔离。
二、带载能力:怎么确定最多能接多少颗 LED?
- 计算逻辑(必背)
按优先级取四个限制条件的最小值 ,优先级从高到低: 芯片物理上限 > 输出电流安全上限 > 芯片总功率上限 > 外部电源功率上限
- 逐一拆解
(1)第一限制:芯片物理硬件上限(硬限制,绝对不能超)
- 如AiP33624 固定支持8 行 ×10 列 ,单芯片最大物理带载:
8×10=80颗LED - 可通过寄存器减少有效行数(比如 7 行就是 70 颗),但无法超过 8 行 10 列
(2)第二限制:输出电流安全上限(最关键)
- SEG 单路电流:手册极限 30mA,实际建议≤24mA(留 20% 余量,防止过热)
- GRID 单路总电流:手册极限 300mA,实际建议≤240mA(留 20% 余量)
- 动态扫描核心公式:
单路GRID总电流 = 单路SEG电流 × 列数 - 示例:我们用 15mA / 路 SEG,10 列的话 GRID 总电流 = 15×10=150mA ≤240mA,完全安全
(3)第三限制:芯片总功率上限
- AiP33624 最大总功率损耗 450mW,5V 供电时自身最大电流 90mA
- 只要 SEG 和 GRID 电流不超安全值,总功率必然在范围内,无需额外计算
(4)第四限制:外部 5V 电源功率上限
- 动态扫描误区纠正:不是单颗电流 × 总颗数,而是同一时间只有 1 行亮
- 整屏最大总电流公式:
整屏总电流 = 单路SEG电流 × 列数 - 电源选型:额定电流 ≥ 整屏总电流 × 1.2(留 20% 余量)
- 示例:15mA×10 列 = 150mA,电源选 5V/200mA 以上即可
供学习参考LED驱动芯片手册
- 多芯片扩展
AiP33624 不支持级联,超过 80 颗 LED 时,每颗芯片独立接 80 颗 LED,单片机用多个 IO 口分别控制每颗芯片的通信引脚。
三、单片机 IO 口参数:IO 口的电流电压是多少?能直接驱动 LED 吗?
(以下为列子作为参考学习,不同型号单片机芯片具体以数据手册为主)
1、拉电流与灌电流基础概念
用大白话解释:
- 灌电流:电流从外部流入单片机 IO 口,相当于 IO 口在 "吸电"
- 拉电流:电流从单片机 IO 口流出到外部,相当于 IO 口在 "吐电"
核心结论:绝大多数单片机的灌电流能力远强于拉电流能力,这是行业普遍推荐灌电流驱动 LED 的根本原因。
2、两种 LED 驱动接法详解
- 推荐接法:灌电流驱动(所有单片机通用)
接线顺序(从左到右): 电源正极 (VCC) → LED 长脚 (正极) → LED 短脚 (负极) → 限流电阻 → 单片机 IO 口
- 电流方向:VCC → LED → 电阻 → IO 口(流入单片机)
- 亮灭逻辑:IO 口输出低电平时 LED 亮,输出高电平时 LED 灭
- 优点:驱动能力最强、亮度最高、最安全、兼容性最好
- 不推荐接法:拉电流驱动
接线顺序(从左到右): 单片机 IO 口 → 限流电阻 → LED 长脚 (正极) → LED 短脚 (负极) → 电源负极 (GND)
- 电流方向:IO 口 → 电阻 → LED → GND(流出单片机)
- 亮灭逻辑:IO 口输出高电平时 LED 亮,输出低电平时 LED 灭
- 缺点:驱动能力弱、亮度低、兼容性差,传统 51 单片机几乎无法正常使用
3、灌电流与拉电流核心区别对比
| 对比项目 | 灌电流驱动(推荐) | 拉电流驱动(不推荐) |
|---|---|---|
| 电流方向 | 外部流入 IO 口 | 从 IO 口流出外部 |
| LED 点亮条件 | IO 输出低电平 | IO 输出高电平 |
| 传统 51 单片机能力 | 单 IO 最大 20mA | 单 IO 最大仅 1mA |
| STM32/ESP32 能力 | 单 IO 最大 25-40mA | 单 IO 最大 25-40mA |
| LED 亮度 | 亮度充足且稳定 | 51 单片机几乎不亮,STM32 亮度也偏低 |
| 安全性 | 更高,IO 损坏时不易烧毁 LED | 更低,IO 意外输出高电平时 LED 常亮易烧 |
| 总电流限制 | 更宽松,适合同时驱动多个 LED | 更严格,易超过芯片总电流上限 |
| 兼容性 | 所有单片机、所有颜色 LED 通用 | 仅部分单片机、部分颜色 LED 可用 |
4、优先使用灌电流驱动的 3 个关键原因
- 兼容性无敌:无论使用传统 51 单片机还是 STM32、ESP32 等新型单片机,灌电流接法均能正常工作,更换单片机无需修改电路
- 亮度有保障:传统 51 单片机拉电流仅 1mA,无法点亮 LED;灌电流可达 20mA,可灵活调节 LED 亮度
- 养成通用设计习惯:后续驱动继电器、电机等其他外设时,绝大多数场景也采用灌电流接法,原理完全一致
特别说明:STM32 和 ESP32 的拉电流与灌电流能力相近,但仍建议优先使用灌电流,以养成通用的电路设计习惯。
5、主流单片机 IO 口核心参数(参考)
| 单片机型号 | 供电电压 | 单 IO 最大灌电流 | 单 IO 最大拉电流 | 芯片总电流上限 |
|---|---|---|---|---|
| STC89C52(传统 51) | 5V | 20mA | 1mA | 120mA |
| STM32F103 | 3.3V | 25mA | 25mA | 100mA |
| ESP32 | 3.3V | 40mA | 40mA | 200mA |
| Arduino Uno(ATmega328P) | 5V | 40mA | 40mA | 200mA |
6、IO 口直接驱动 LED 能力判断
前提:普通小功率 LED(大小3mm/5mm)工作电流 2-20mA,必须串联限流电阻!
- 红 / 黄 LED 正向压降:1.8-2.2V
- 绿 LED 正向压降:2.0-2.4V
- 蓝 / 白 LED 正向压降:3.0-3.3V
| 驱动组合 | 能否驱动 | 详细说明 |
|---|---|---|
| 5V 单片机 + 灌电流 | 完全可以 | 所有颜色 LED 均能正常点亮,亮度充足 |
| 5V 单片机 + 拉电流 | 不推荐 | 51 单片机几乎不亮,STM32 亮度偏低 |
| 3.3V 单片机 + 灌电流 | 部分可以 | 红 / 黄 / 绿 LED 正常,蓝 / 白 LED 因电压不足几乎不亮 |
| 3.3V 单片机 + 拉电流 | 不推荐 | 同上,亮度更低 |
限流电阻计算公式(灌电流接法):
R=(供电电压 - LED 正向压降)÷ 工作电流 示例:
5V 供电 + 红色 LED (2V)+LED正常工作电流10mA→ R=(5-2)÷0.01=300Ω,可选用 330Ω 标准电阻
我们需要串联一定的阻值确保芯片不会烧坏,同时LED能够正常点亮
未串联电阻会发生的情况
- 单片机带有过流保护,会主动压低电流,LED 就会亮度不足。
- 单片机没有过流保护,超大电流会直接烧坏芯片引脚。
7、不能直接驱动 LED 的情况
- 大功率 LED(0.5W 以上,工作电流≥150mA)
- 同时驱动多个 LED,总电流超过芯片总电流上限
- 需要超高亮度,单 LED 电流超过 IO 口额定值
以上情况必须使用三极管、MOS 管或 ULN2003 等专用驱动芯片扩展驱动能力。
四、通信方式:单片机常用通信方式有哪些?为什么选 SPI/I2C?
1.通信方式
| 通信方式 | 引脚数 | 特点 | 适用场景 |
|---|---|---|---|
| SPI(串行外设接口) | 4 根(SCK、MOSI、MISO、CS)(简化版 3 根,无 MISO) | 同步串行通信,全双工,速率极高(可达几十 MHz);主从架构,支持多从机(每个从机独立 CS);无内置寻址机制;通信距离短 | 高速板级外设通信:Flash 存储器、LCD/OLED 显示屏、ADC/DAC、摄像头、SD 卡、无线模块 |
| I2C(集成电路总线) | 2 根(SCL、SDA)(需外接上拉电阻) | 同步串行通信,半双工,速率中等(标准 100kbps / 快速 400kbps / 高速 3.4Mbps);支持多主机多从机;每个设备有唯一 7 位 / 10 位地址;内置总线仲裁;引脚极少,布线简单 | 低速板级多设备互联:温度传感器、EEPROM、RTC 实时时钟、触摸屏、音频 Codec、LED 驱动 |
| UART(异步串口) | 2 根(TX、RX) | 最通用,无时钟线,靠波特率同步;一对一通信;支持全双工;通信距离中等(RS232 约 15 米,RS485 可达千米) | 电脑与 MCU 通信、蓝牙 / WiFi 模块通信、GPS 模块、串口调试 |
| 1-Wire 单总线 | 1 根 | 引脚最少,同时传输数据和电源;但速率极慢(约 16kbps);单主多从架构 | 单总线温度传感器(DS18B20)、ID 卡、电池管理芯片 |
| CAN 总线 | 2 根(差分信号:CAN_H、CAN_L) | 异步串行,差分传输,抗干扰能力极强;支持多主多从;自带错误校验和重发机制;通信距离远(最高 10km@5kbps) | 汽车电子(动力系统、底盘控制)、工业自动化、机器人、轨道交通 |
| LIN 总线 | 1 根 | 比 CAN 简单,成本极低;单主多从架构;速率低(最高 20kbps);是 CAN 的低成本补充 | 汽车车身简单外设:车窗、雨刮、座椅调节、车灯控制 |
| 并行总线 | 十几根~几十根 | 速度快(并行传输多位数据);但占用大量 IO 口,布线复杂,抗干扰差,成本高 | 早年打印机、大屏显示、老式 CPU 与内存通信,现已基本被串行总线淘汰 |
补充说明
速率对比:SPI > UART > I2C > CAN > LIN > 1-Wire
引脚成本对比:1-Wire/LIN < I2C/UART/CAN < SPI < 并行总线
抗干扰能力对比:CAN > LIN > UART (RS485) > SPI > I2C > 1-Wire > 并行总线
SPI(4 线,全双工)
MOSI/MISO:一对双向数据通道,MOSI 是主机发数据给外设,MISO 是外设发数据给主机,能同时收发。
SCK/CS:SCK 是主机发的时钟信号,控制传输节奏;CS 是片选线,用来选中当前要通信的外设。
I2C(2 线,半双工)
SCL(时钟线):主机发出的统一节拍信号,所有设备跟着这个节拍同步数据传输。
SDA(数据线):唯一的双向数据通道,地址、命令和数据都在这根线上分时传输。
- 为什么点阵驱动优先选 SPI/I2C?
- 省引脚:SPI 用 3-4 根,I2C 只用 2 根,远少于并行总线
- 支持多设备:一条总线可以挂载多颗驱动芯片,扩展方便
- 速率足够 :SPI 速率快,点阵刷新流畅无闪烁;I2C 适合小尺寸点阵
- 布线简单:线少,PCB 布线更简洁,干扰小
五、LED 参数:普通发光二极管的电流电压是多少?
- 核心参数表(必背)
LED 是电流型器件 ,核心参数是正向工作电流 If,正向压降 Vf 随颜色变化:
表格
| LED 颜色 | 正向压降 Vf(典型值) | 额定工作电流(小功率) | 实际推荐电流 |
|---|---|---|---|
| 红、橙 | 1.8~2.2V | 20mA | 15~18mA |
| 黄、黄绿 | 2.0~2.4V | 20mA | 15~18mA |
| 绿、蓝、白 | 3.0~3.4V | 20mA | 15~18mA |
- 关键说明
- 比如用的0402 贴片白光 LED,正向压降 3.0~3.2V,额定电流 20mA,实际用 15mA(留余量,延长寿命)
- 电压小幅波动会导致电流剧变,所以必须用恒流驱动,不能只用电阻限流
- 超过额定电流后,亮度提升不明显,但光衰会急剧加快,寿命大幅缩短
六、驱动芯片电流:驱动芯片输出电流是多少?怎么控制?
- AiP33624 输出电流参数
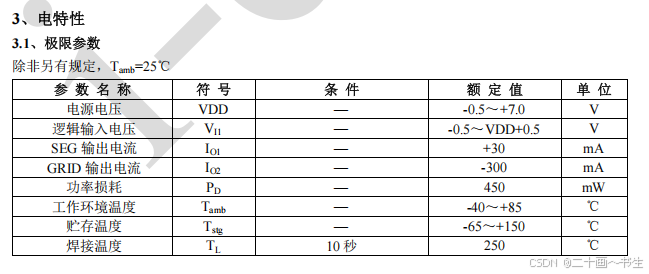
- 极限参数:SEG 单路最大 30mA,GRID 单路最大 300mA(任何情况下不能超过)
- 实际推荐:SEG 10~20mA,GRID ≤240mA(留 20% 安全余量)
- 电流控制方法(必背)
例如:AiP33624 是纯软件恒流芯片,无需外接电阻,通过单片机发指令修改内部寄存器即可,有些驱动芯片是可以通过硬件控制的,具体看数据手册:
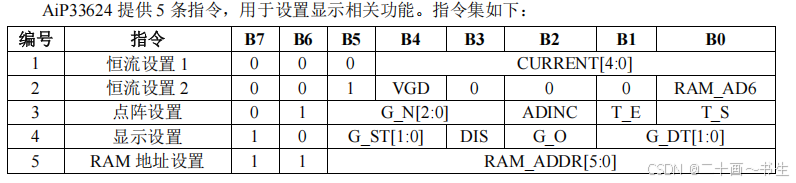
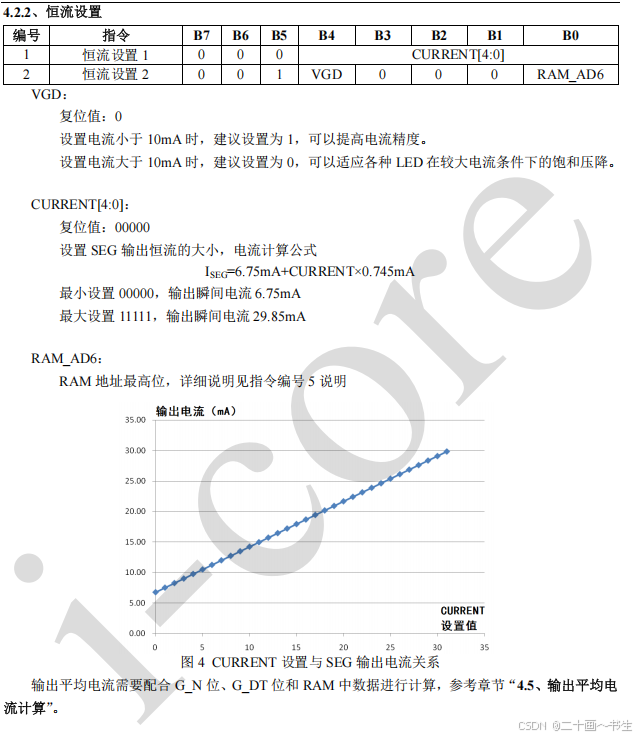
(1)核心公式
\(I_{SEG}=6.75\mathrm{mA} + CURRENT × 0.745\mathrm{mA}\)
CURRENT是 5 位二进制数,范围 0~31(共 32 级)- 上电默认 CURRENT=0,对应输出 6.75mA(LED 很暗,必须手动设置)
(2)配套 VGD 位
- 目标电流<10mA:VGD 设为 1,提高小电流精度
- 目标电流>10mA:VGD 设为 0,适配大电流 LED 特性(我们常规都设 0)
(3)操作步骤
- 单片机发送恒流设置 1 指令,写入计算好的 CURRENT 值
- 发送恒流设置 2 指令,写入 VGD 位
- 指令发送完成后,所有 SEG 通道电流同步更新
(4)示例
要设置 15mA: CURRENT=(15-6.75)÷0.745≈11,二进制 01011,恒流设置 1 指令为 0x0B;VGD 设 0,恒流设置 2 指令为 0x20。
用于参考理解,具体以数据手册为准
七、灰度、亮度、功耗:如何控制 LED 的灰度级、亮度和功耗?
- 灰度级控制(单点亮度调节)
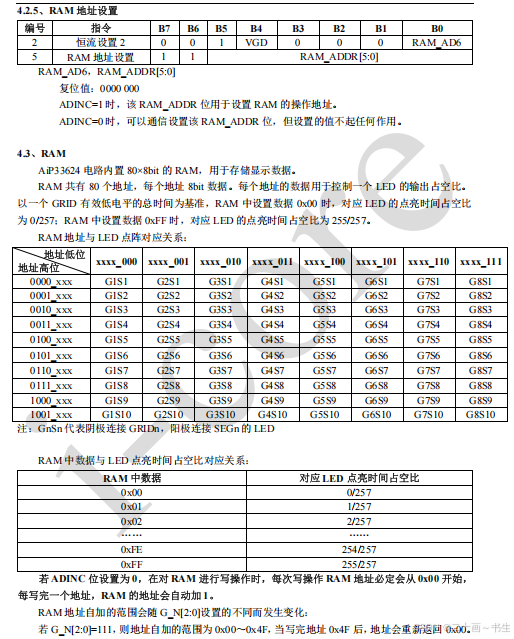
- 调节位置 :芯片内部显示 RAM
- 原理:每个 LED 对应一个 8bit RAM 地址,写入不同数值控制 LED 的点亮时间占空比(PWM 调光)
- 对应关系 :
- 0x00 → 0/257 占空比(熄灭)
- 0xFF → 255/257 占空比(最亮)
- 共 256 级灰度,可实现文字、图形和渐变效果
- 操作方法:设置 ADINC=0(地址自动递增),连续写入 80 个字节的灰度数据即可
- 全局亮度控制(所有 LED 同步调亮 / 调暗)
- 调节位置 :
CURRENT[4:0]寄存器 - 原理:修改所有 SEG 通道的输出电流大小,整体改变整屏亮度
- 区别于灰度:灰度是单个 LED 的占空比调节,全局亮度是所有 LED 的电流调节
- 配合使用:上电先设全局基础亮度,显示内容时用灰度调节单个 LED
- 功耗控制
- 降低单路 SEG 电流:比如从 20mA 降到 15mA,功耗直接降低 25%
- 减少同时点亮的 LED 数量:通过灰度调节降低不必要的亮度
- 优化扫描参数:适当降低扫描频率(不影响视觉效果的前提下)
- 动态扫描功耗公式 :
整屏平均功耗 = 5V × 单路SEG电流 × 列数