当下,AI正从虚拟交互迈入物理交互,具身智能成为最热赛道。想让机器人拥有媲美人类的操作能力,高质量的接触式交互数据是核心基石。
但许多团队深陷困境:纯视觉数据无法捕捉力触觉信息、多模态难以同步、采集与部署脱节......这些问题严重拖慢算法迭代。
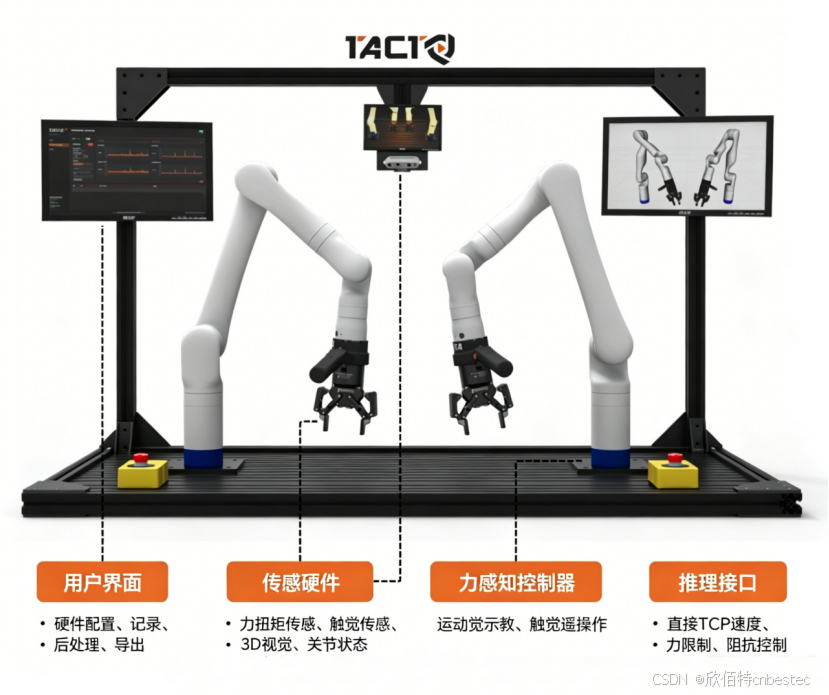
瑞士Bota Systems近日推出的TACTO一体化物理AI平台,以「点击配置 - 采集数据 - 推理部署」三步闭环,融合力觉、触觉、视觉多模态感知,将机器人打造成台真正的Physical AI数据引擎。
一、三步极简流程,打通物理AI全链路
TACTO 主打 CLICK-COLLECT-INFER 全流程体系,无需复杂二次开发,工程师可专注算法与业务本身,大幅缩短落地周期。
✅ CLICK 可视化配置,上手零门槛

通过浏览器端操作界面完成硬件调试、采集模式设置、参数配置。录制、后处理、数据导出全部在统一界面完成,减少环境搭建与格式整理的部署工作。
✅ COLLECT 多 模态 采集,产出黄金数据集
Kinova Gen3机械臂------专属Bota六维力传感器套件
数据采集是物理 AI 的核心环节,也是 TACTO 的核心优势。平台内置专业力控控制器,支持三种主流采集模式,同步收录机器人状态(关节位置/速度/力矩、TCP力/力矩)、指尖触觉、3D视觉等,实现高精度时序同步。
- 触觉遥操作:操作员远程操控时可实时接收环境接触反馈,适合高危环境、多机器人协同、人机在环训练。
- 拖动示教 :手动拖拽机械臂即可复刻动作,同步记录位置与力控数据,相同 任务 采集效率 对比 传统逐点示教 , 提升 约 10倍 。
- 指尖触觉采集:捕捉视觉无法识别的微力、滑移等细节,赋能精细抓取与灵巧手操作。
✅ INFER 灵活推理,数据落地一步到位
力感知VLA + BOTA力传感器 | 具身触觉智能实战演示
完成数据采集后,平台提供灵活的推理接口,可直接部署 VLA、扩散策略等主流机器人学习模型。自带末端速度控制、接触力限制、自适应阻抗等功能,开箱即用,真正实现 "采完数据,就能上线模型"。
二、硬核传感硬件,筑牢数据品质底线
物理AI数据的价值,首先取决于力觉信号的真实性与可重复性。TACTO的数据底座来自Bota自研的高性能力触觉传感硬件:

- 六维力/力矩传感器:在TCP端提供高精度、低噪声的力觉数据,官方标称精度/分辨率达<0.1N级,能够清晰捕捉"刚接触"、"压紧"、"滑移临界"等关键时刻的力变化。
- 指尖触觉传感器:灵敏度达<0.01N级,可感知微小的接触力与滑移趋势------这在精密抓取、易碎品操作中是纯视觉完全无法获取的信息。
- 高带宽低延迟:传感器链路支持最高8kHz级采样率,确保动态接触过程中的力信号不被丢失或滞后。
同时平台具备超强兼容性,即插即用适配 Franka、Kinova、优傲、史陶比尔等十余款主流机器人与夹爪,无需额外改造,快速对接现有设备。

三、完善软件生态,科研工业双向适配
在软件层面,平台全面兼容 Python、C++、ROS2 等主流开发工具,搭配负载补偿、力控算法库,覆盖模仿学习、柔顺控制、人机交互等主流研究方向。所有数据可添加文本、音频语义标注,无缝对接各类 AI 训练管线。
四、全场景落地,覆盖科研与工业两大赛道
凭借全链路能力,TACTO 平台在不同场景中都发挥着重要价值:
科研学术场景
适配高校、AI 实验室的课题研究,大幅降低多模态数据集制作成本,助力模仿学习、强化学习等物理 AI 方向的论文与算法迭代。
工业自动化场景
可应用于精密零件装配 、危化 / 辐射等高危环境远程作业、易碎品柔性分拣、产线工艺快速复刻等场景,用高质量数据驱动机器人完成高难度物理交互任务。
五、核心价值总结
纵观整个方案,TACTO 精准解决了物理 AI 行业的核心痛点:
- 数据提质:力、触觉、视觉多模态同步采集,补齐纯视觉数据短板,还原真实物理交互;
- 效率翻倍:多样化采集模式让数采效率提升 10 倍,快速积累优质数据集;
- 门槛降低:即插即用软硬件 + 可视化操作,不懂深度力控开发也能快速上手;
- 链路闭环:从配置、采数、处理到模型部署一站式完成,加速物理 AI 商业化落地。
未来,AI 定义机器人将成为行业常态,而 TACTO 无疑是物理 AI 开发者不可或缺的得力工具。
欢迎关注 "欣佰特科技 " ,持续为大家带来 "具身智能领域 "前沿技术及应用!详情可邮件咨询++++sales@cnbestec.com++++