人形机器人系统架构与调度
配套框图:
一、图中内容提取
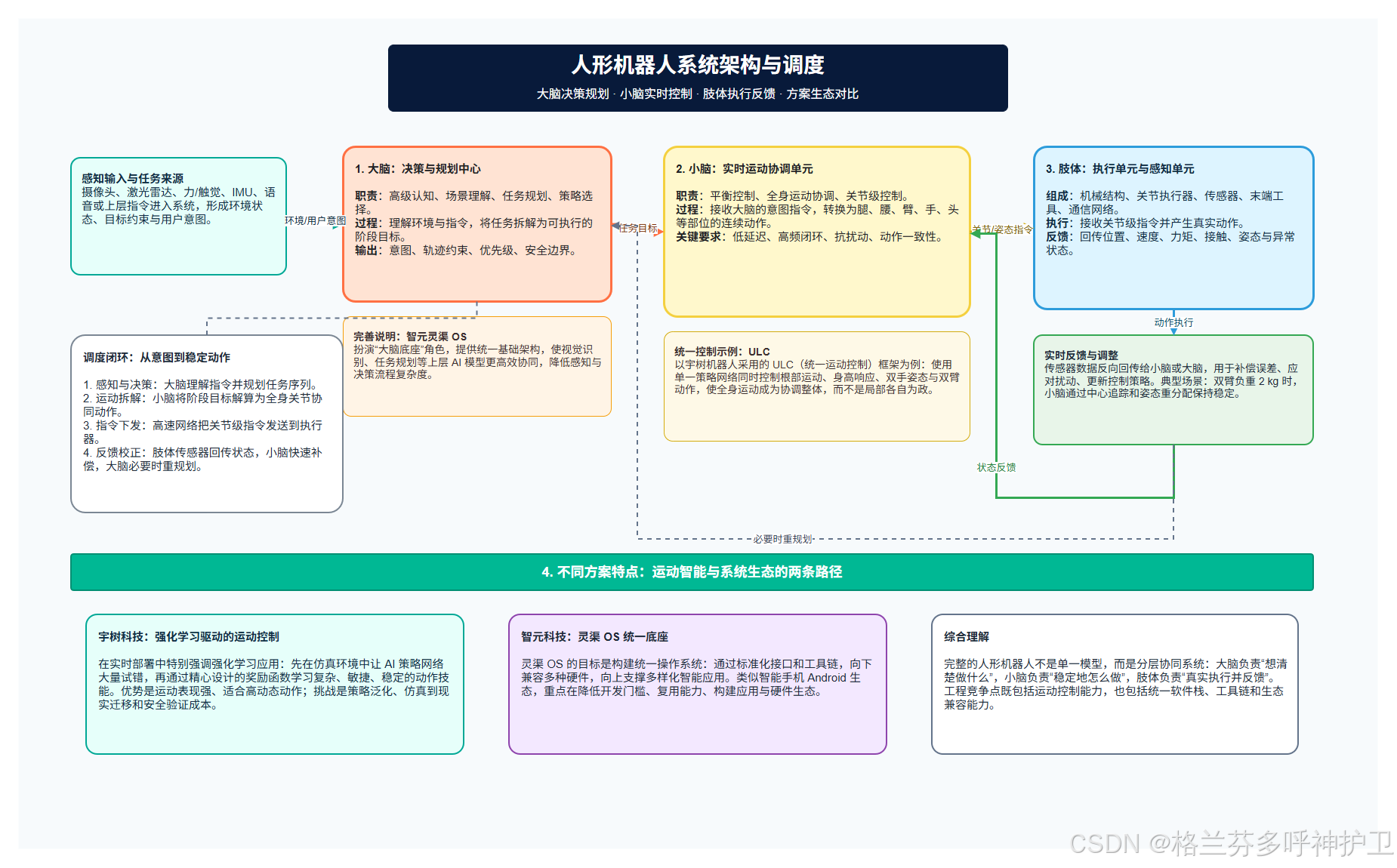
原图围绕"人形机器人系统架构与调度"展开,核心分为四部分:
-
大脑:决策与规划中心
大脑是机器人的智能核心,负责高级认知、任务规划、环境理解和任务拆解。摄像头、激光雷达等传感器提供环境信息,大脑接收指令后进行感知理解、目标生成和任务规划。
-
小脑:实时运动协调功能单元
小脑负责运动协调与平衡控制,接收大脑发出的意图指令,并将其转化为全身各关节的具体动作。以宇树机器人的 ULC 统一运动控制框架为例,小脑可协调根部运动、身高响应、双手姿态、双臂动作等,使机器人整体动作一致。
-
肢体:执行单元与感知单元
肢体包括机械结构、传感器、执行器和通信网络,是小脑指令的最终执行单元。其工作流程包括感知与决策、运动拆解、指令下发与执行、实时反馈与调整。
-
不同方案特点
宇树科技更强调强化学习在运动控制中的应用,通过仿真训练和奖励函数学习复杂稳定动作;智元科技的灵渠 OS 更强调统一操作系统和生态底座,通过标准化接口兼容多种硬件并支撑多样化智能应用。
二、完善后的系统理解
人形机器人可以理解为一个分层闭环系统:
- 大脑回答"做什么":识别环境、理解任务、规划步骤、设定目标和安全约束。
- 小脑回答"怎么稳定地做":把大脑的意图转化为实时运动控制,处理平衡、抗扰动和全身协同。
- 肢体负责"真实执行并反馈":执行器完成动作,传感器持续回传状态,形成闭环修正。
因此,人形机器人的关键不是单点模型能力,而是感知、决策、控制、执行、反馈之间的低延迟协同。
三、调度闭环
- 感知与决策:大脑理解用户指令和环境状态,生成任务序列与初步运动目标。
- 运动拆解:小脑接收目标,通过统一控制框架解算全身关节协同动作。
- 指令下发与执行:关节级指令通过高速网络发送给执行器,肢体完成实际动作。
- 实时反馈与调整:传感器回传位置、速度、力矩、接触、姿态等信息,小脑快速补偿,大脑在必要时重新规划。
四、方案对比
| 方案 | 侧重点 | 优势 | 挑战 |
|---|---|---|---|
| 宇树科技 | 强化学习与实时运动控制 | 高动态动作能力强,适合复杂敏捷运动 | 仿真到现实迁移、策略泛化、安全验证成本较高 |
| 智元科技 | 灵渠 OS 与统一软件生态 | 降低开发门槛,统一接口,便于硬件兼容和应用生态构建 | 需要长期积累工具链、开发者生态和跨硬件适配能力 |
五、简洁结论
人形机器人架构的本质是"大脑-小脑-肢体"的协同闭环:大脑负责智能决策,小脑负责实时控制,肢体负责执行与反馈。宇树科技代表偏运动智能的路线,智元科技代表偏系统生态的路线,两者共同指向更通用、更稳定、更易开发的人形机器人平台。