从无序三维点云拟合三维曲线:研究进展综述
领域 : 计算机图形学 / 计算机视觉 / 几何处理
关键词: 无序点云、三维曲线拟合、曲线骨架提取、深度学习、参数化重建
目录
- 4.1 参数曲线拟合 (B-Spline / NURBS)
- 4.2 移动最小二乘法 (MLS)
- 4.3 [RANSAC 方法](#RANSAC 方法)
- 4.4 霍夫变换 (Hough Transform)
- 4.5 曲线骨架提取
- 4.6 基于优化的方法
- 5.1 边缘点检测方法
- 5.2 端到端参数曲线提取
- 5.3 神经隐式表示 (Neural Implicit)
- 5.4 [CAD 逆向工程方法](#CAD 逆向工程方法)
1. 摘要
从无序三维点云中拟合三维曲线(3D curve fitting from unorganized point clouds)是计算机图形学、计算机视觉和几何处理领域的核心问题之一。其目标是从一个没有明确拓扑连接关系的离散三维点集中,重建出连续、光滑、结构化的曲线表示(如 B-Spline、NURBS、分段线性曲线等)。该问题在 CAD 逆向工程(reverse engineering)、文化遗产数字化保护(HBIM)、电力线巡检、医学血管建模、机器人路径规划等大量实际应用中扮演关键角色。
核心难点在于:(1) 无序点云缺少明确的几何拓扑信息;(2) 输入数据常伴有严重噪声、异常值和遮挡缺失;(3) 自由形态曲线的拓扑复杂多样,难以用统一模型描述;(4) 需要同时满足高精度重建和计算效率的平衡。
近年来,技术路线正经历从传统几何方法 (B-Spline/NURBS 拟合、RANSAC、Hough 变换、骨架提取)到深度学习驱动方法(边缘检测网络、神经隐式表示、端到端参数曲线重建)的重大范式转移。本报告系统梳理了截至 2026 年上半年的研究进展,涵盖五十余篇核心文献,从方法论、应用场景和开源生态三个维度进行全面综述。
2. 问题定义与核心挑战
2.1 问题形式化定义
设输入为无序三维点集 P = { p i ∈ R 3 } i = 1 N \mathcal{P} = \{p_i \in \mathbb{R}^3\}_{i=1}^{N} P={pi∈R3}i=1N,目标是:
- 识别 (Recognition):判断曲线属于何种类型(如直线、圆弧、螺旋线、样条曲线等)
- 重建 (Reconstruction) :输出一条或多条连续曲线 C ( t ) : 0 , 1 → R 3 \mathcal{C}(t): 0,1 \rightarrow \mathbb{R}^3 C(t):0,1→R3,在某种度量下最佳逼近输入点集
- 参数化 (Parameterization):为曲线赋予有意义的参数表示(如控制点、节点向量等)
2.2 核心挑战
| 挑战 | 具体影响 |
|---|---|
| 无序性 (Unorganized) | 缺少邻接关系、连接顺序、方向信息 → 需从几何分布推断拓扑 |
| 噪声与异常值 | 扫描设备误差、环境干扰 → 简单最小二乘失效 |
| 数据缺失 (Occlusion) | 自遮挡或扫描盲区 → 曲线不完整 |
| 拓扑未知性 | 曲线可能分叉、交叉、形成闭合环 → 单一模板失效 |
| 采样不均匀 | 扫描视角导致局部密度差异 → 各向异性误差 |
| 多曲线共存 | 一根电线杆上多条电力线交错 → 需同时分割与拟合 |
| 尺度差异 | 树干 (米级) 与细枝 (毫米级) 并存 → 骨架收缩畸变 |
3. 技术方法分类总览
本报告将现有方法分为两大范式、六个子类:
从无序三维点云拟合三维曲线
├── 传统几何方法 (Traditional)
│ ├── 参数曲线拟合 (B-Spline/NURBS Fitting)
│ ├── 局部逼近 (MLS, Moving Least Squares)
│ ├── 随机采样一致性 (RANSAC)
│ ├── 霍夫变换 (Hough Transform)
│ ├── 曲线骨架提取 (Skeletonization)
│ └── 基于优化的方法 (Geometric Optimization)
│
└── 深度学习方法 (Deep Learning)
├── 边缘点检测网络 (Edge Detection)
├── 端到端参数曲线重建 (End-to-End)
├── 神经隐式表示 (Neural Implicit)
└── 混合分析-神经方法 (Hybrid Analytic-Neural)4. 传统方法
4.1 参数曲线拟合 (B-Spline / NURBS)
4.1.1 基本原理
B-Spline 和 NURBS(非均匀有理 B 样条)是工业界 CAD/CAM 的实际标准。核心思想是通过最小化点到曲线的距离平方和来优化控制点:
min P j ∑ i = 1 N ∥ p i − C ( t i ) ∥ 2 \min_{P_j} \sum_{i=1}^N \| p_i - \mathcal{C}(t_i) \|^2 Pjmini=1∑N∥pi−C(ti)∥2
其中 C ( t ) = ∑ j N j , k ( t ) P j \mathcal{C}(t) = \sum_j N_{j,k}(t) P_j C(t)=∑jNj,k(t)Pj, N j , k ( t ) N_{j,k}(t) Nj,k(t) 为 B 样条基函数。
4.1.2 关键工作
- Dimitrov & Golparvar-Fard (2016) 12:提出面向 HBIM 的 NURBS 曲面/曲线拟合全流程管线,从点云分割到最终 NURBS 输出,可处理含噪声和不完整数据。
- Ivan et al. (2025) 3:专门针对 2D/3D 扫描点云在历史建筑信息建模(HBIM)中的曲线拟合,提出"目标逼近"策略,通过分析点云特征来优化曲线选择。
4.1.3 优势与局限
- 优势:数学表达精确、可导、无缝对接 CAD 系统、参数可控
- 局限:需要已知节点向量和曲线阶数;对噪声敏感;难以处理复杂拓扑(分叉、环)
4.2 移动最小二乘法 (MLS)
4.2.1 基本原理
MLS 是经典最小二乘的局部化改进。不在全局域上用单一多项式逼近,而是在每个查询点 x x x 处做局部加权拟合:
f ( x ) = min β ∑ i w ( ∥ p i − x ∥ ) ⋅ ( y i − Φ ( p i ) T β ) 2 f(x) = \min_{\beta} \sum_i w(\|p_i - x\|) \cdot (y_i - \Phi(p_i)^T \beta)^2 f(x)=βmini∑w(∥pi−x∥)⋅(yi−Φ(pi)Tβ)2
其中 w ( ⋅ ) w(\cdot) w(⋅) 为紧支撑权函数(如高斯核、Wendland 函数)。
4.2.2 在曲线拟合中的应用
- 点云平滑与重采样 :PCL 库中
pcl::MovingLeastSquares用于法线估计改善和平滑。 - Zhang et al. (2025) 4 的系统综述总结了 MLS 的七大类改进方案,包括自适应带宽选择、各向异性权重、鲁棒 M-估计等。
- 曲线投影:MLS 曲面/曲线的隐式定义特性使其天然适用于点到曲线的迭代投影(如 Alexa et al. 2001 的经典工作)。
4.2.3 优势与局限
- 优势:局部自适应性好、无需全局参数化、鲁棒
- 局限:不能直接产生参数曲线输出;紧支撑半径选择敏感;计算量大(每点需单独求解局部最小二乘)
4.3 RANSAC 方法
4.3.1 基本原理
RANSAC(RANdom SAmple Consensus)是一种鲁棒参数估计框架:随机采样最小点集拟合候选模型 → 统计内点数量 → 迭代选择最优模型。
4.3.2 在三维曲线拟合中的应用
- pyRANSAC-3D 5:开源实现,支持从点云中拟合平面、长方体、圆柱体等基本形状(注:当前主流 RANSAC 库主要针对面状 和体状 原语,曲线专用 RANSAC 相对较少)。
- Efficient RANSAC (Schnabel et al.):经典的 Efficient RANSAC 算法能高速提取多种基本形状,可作为曲线拟合的预处理分割步骤。
- 电力线方向:多篇研究先使用 RANSAC 提取直线段,再用悬链线模型拟合 6。
4.3.3 优势与局限
- 优势:极度鲁棒(可容忍高达 50% 的异常值)、无需初始值、概念简单
- 局限:仅适合参数少的简单曲线模型(直线、圆);复杂曲线参数空间维度高导致组合爆炸
4.4 霍夫变换 (Hough Transform)
4.4.1 基本原理
霍夫变换将曲线检测问题转化为参数空间中的峰值搜索问题:每个数据点对参数空间中的所有可能参数组合"投票",参数空间中累计最高区域对应最可能的曲线参数。
4.4.2 三维空间曲线 Hough 变换的最新进展
Raffo & Biasotti (2024) 7 系统性地将 Hough 变换扩展到三维空间曲线识别与逼近,提出三种方法:
| 方法 | 识别能力 | 逼近精度 | 先验需求 | 计算时间 |
|---|---|---|---|---|
| 方法一:投影到回归平面 | ✓ | --- | 需要 | 5s |
| 方法二:全局空间曲线 | ✓ | ★★ | 需要 | 13s |
| 方法三:分段多项式曲线 | ✗ | ★★★ | 不需要 | 51s |
方法一(基于投影):将三维点投影到回归平面降维为二维曲线识别,再从二维结果映射回三维。适合可展平曲线,精度最低。
方法二(全局空间曲线):直接在三维空间使用螺旋线、网球缝线曲线等空间曲线族进行 Hough 识别。提出了 Type I(已知解析表示的经典空间曲线)和 Type II(由抛物面与柱面相交生成的曲线族),后者极大扩展了可识别曲线的种类。
方法三(分段多项式空间曲线):放弃全局模板,将轮廓 PCA 分割为子段后分别用三次多项式逼近两个正交投影,再重组为 G1 连续的分段空间曲线。精度最高(MFE=0.0096),且完全不需要先验知识。
4.4.3 其他 Hough 相关工作
- Dalitz et al. (2017) 8:提出迭代三维直线 Hough 变换 (
hough-3d-lines),在 RANSAC 之前先检测大致方向,Python 包hough3d9 可用。
4.4.4 优势与局限
- 优势:全局最优保证、鲁棒、对异常值不敏感
- 局限:参数空间维度爆炸(O(M^d))、需要参数空间离散化精度权衡、高维空间峰值搜索困难
4.5 曲线骨架提取
曲线骨架(curve skeleton)是三维形状的一维中线表示,天然形成"三维曲线"。
4.5.1 拉普拉斯收缩法 (Laplacian-Based Contraction, LBC)
Cao et al. (2010) 10 是该领域的奠基性工作。核心思想是迭代求解线性系统收缩点云直至收敛为骨架:
W L L W H \] P ′ = \[ 0 W H P \] \\begin{bmatrix} W_L L \\\\ W_H \\end{bmatrix} P' = \\begin{bmatrix} 0 \\\\ W_H P \\end{bmatrix} \[WLLWH\]P′=\[0WHP
其中 L L L 为拉普拉斯矩阵(余切权), W L W_L WL 和 W H W_H WH 分别为收缩力与吸引力对角权重矩阵。
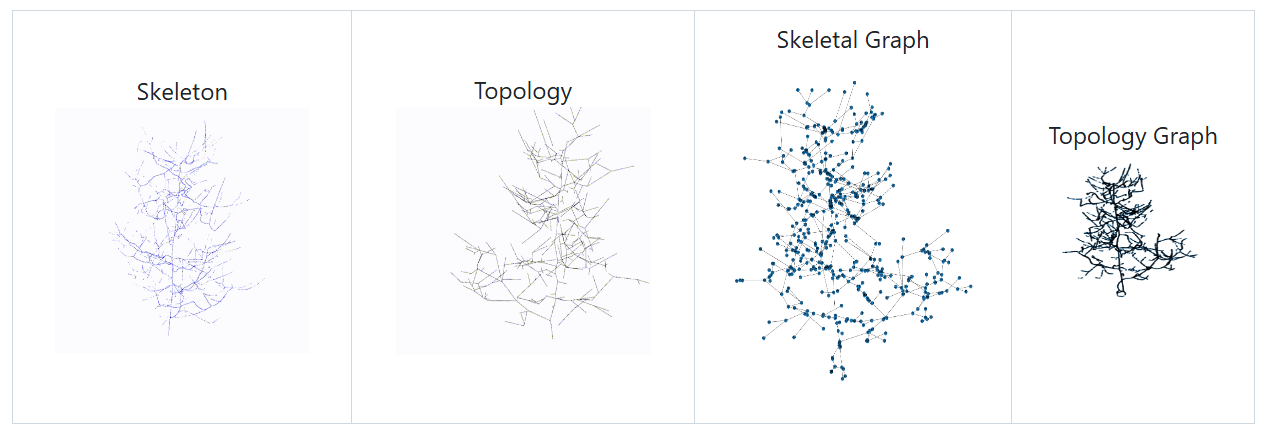
PC-Skeletor 11 是该方法的 Python 开源实现,提供:
LBC(标准拉普拉斯收缩骨架化)S-LBC(语义拉普拉斯收缩,引入语义标签改善粗细差异显著结构的收缩质量)- 输出包括:收缩点云、骨架图 (networkx)、拓扑结构 (LineSet)
局限性:当主干与分支直径差异大时,细分支过度收缩导致拓扑失真;含孔洞结构产生错误拓扑连接。S-LBC 通过语义权重部分缓解了该问题。
4.5.2 L1 中轴骨架 (L1-Medial Skeleton)
Huang et al. (2013) 12 提出基于 L1 中轴的骨架提取,利用 L1 范数的稀疏性自然产生细线状骨架,尤其擅长处理含噪声的点云。PC-Skeletor 计划集成此方法(尚未实现)。
4.5.3 混合骨架提取
Lian et al. (2020) 13:通过混合收缩与聚类策略从点云提取曲线骨架,基于截面质心集合定义曲线骨架表达。
保特征的骨架提取算法 (2023) 14:针对含噪声点云,提出特征保持的骨架提取策略,特别关注尖锐特征的处理。
4.5.4 管状结构中心线提取
- DeformCL (CVPR 2025) 15:提出基于可变形中心线的三维血管提取方法,直接从三维医学图像中预测连续中心线表示,避免了传统像素级分割的断裂和假阳性问题。
- One-stage Multitask (2025) 16:单阶段多任务网络同时完成血管分割和中心线提取。
- Semi-Automatic Correction (2025) 17:通过变分优化半自动校正管状结构骨架。
4.6 基于优化的方法
4.6.1 最小二乘优化
经典的三维参数曲线拟合通过最小化残差平方和实现:
min θ ∑ i = 1 N d ( p i , C θ ) 2 \min_{\theta} \sum_{i=1}^N d(p_i, \mathcal{C}_\theta)^2 θmini=1∑Nd(pi,Cθ)2
- 多项式曲线:直接求解线性最小二乘(三维坐标分别参数化)
- Bézier 曲线:通过 Bernstein 基函数线性拟合控制点
- 样条曲线:需同时优化控制点和节点向量 → 非线性优化问题(Gauss-Newton / Levenberg-Marquardt)
开源库:ALGLIB 18 提供 C++/C#/Java 的全面曲线曲面拟合算法。
4.6.2 约束优化
- 电力线悬链线拟合 6:2019-2023 年系列工作,使用物理约束(悬链线方程)从 LiDAR 点云中拟合电力线。提出高效的悬链线最近点查找算法和链式拟合策略。
- 高速公路曲线重建 (2023) 19:利用强化学习算法同时拟合多条高速公路曲线,将曲线检测建模为序列决策问题。
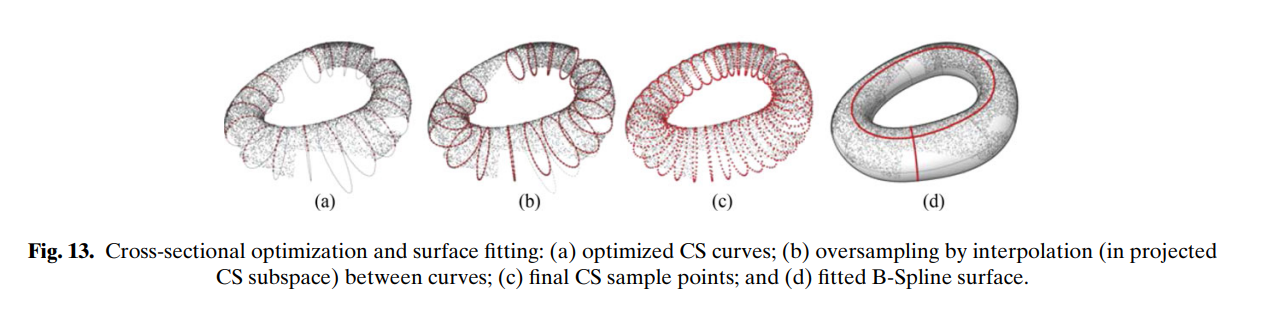
- 图引导 B-Spline 曲面重建 (2025) 20:基于图字典引导的 B-Spline 曲面拟合,可处理变分辨率点云。
4.6.3 优势与局限
- 优势:数学严密、可提供置信区间、易于融入先验约束
- 局限:需要良好的初始估计、局部最优问题、对异常值敏感(需配合鲁棒损失函数)
5. 深度学习方法
5.1 边缘点检测方法
深度学习方法首先将曲线拟合问题分解为"先检测边缘点,再拟合曲线"的两阶段流程。
5.1.1 EC-Net (ECCV 2018)
Yu et al. (2018) 21 提出第一个基于深度学习的点云上采样与边缘保持网络:
- 在 PU-Net 基础上引入边缘距离回归损失和边缘损失
- 将"点到最近边缘的距离"作为回归目标 → 间接识别边缘点
- 局限性:仅输出边缘点得分,不提供曲线连接关系
5.1.2 EDC-Net (2021)
Capsule Network 方法 22:引入胶囊网络(Capsule Network)进行点云边缘检测,利用胶囊的矢量表示天然捕获几何部件间的姿态关系,鲁棒性优于传统 CNN 方法。
5.1.3 PIE-Net & PCEDNet
后续工作(PIE-Net、PCEDNet 等)将边缘检测表述为分类任务:每个点判断是否为边缘点。关键改进包括多尺度特征提取和注意力机制。
5.1.4 DEF (SIGGRAPH 2022)
Matveev et al. (2022) 23 提出 Deep Estimators of Features,是当前边缘检测方向的 SOTA:
- 从采样形状中预测到最近特征线的距离场
- 首个可扩展到大规模点云的方法:在局部 patch 上估计距离场后融合全局结果
- 输出距离场 → 提取等值线 → B-Spline 曲线拟合获得参数化结果
- 自然适应复杂 3D 模型和大规模含噪点云
5.2 端到端参数曲线提取
这类方法直接输出参数曲线表示,跳过了显式的边缘点检测步骤。
5.2.1 NerVE (CVPR 2023) --- 最具代表性的工作
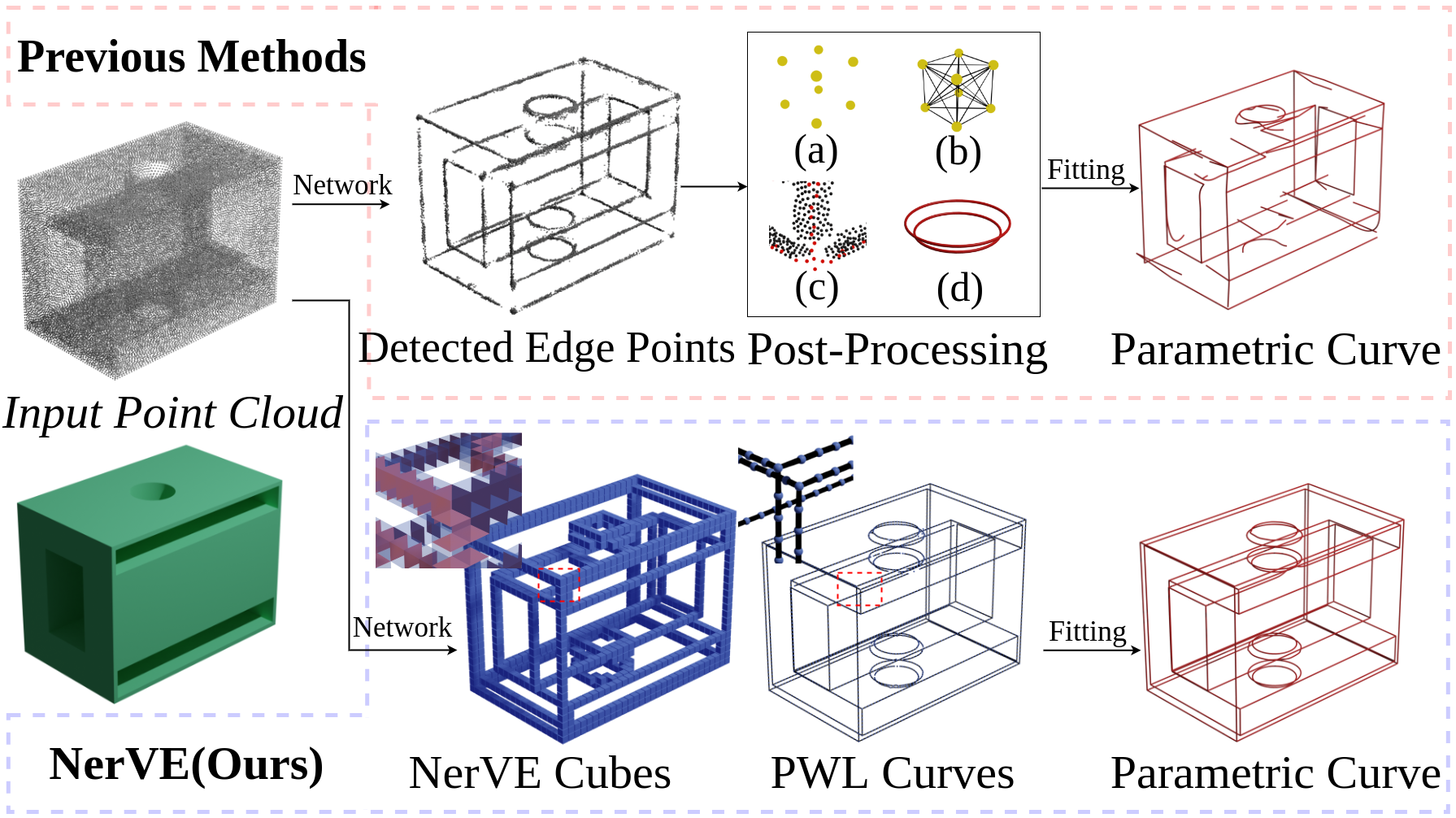
Du et al. (2023) 24 提出 Neural Volumetric Edges,是该领域的突破性工作:
核心思想:
- 将连续三维曲线离散化到规则体积网格 中,每个立方体存储三个属性:
- 边缘占用 (edge occupancy o o o) --- 该体素是否包含曲线
- 边缘方向 (edge direction e e e) --- 曲线穿过体素的方向向量
- 边缘点位置 (point position p p p) --- 曲线在体素内的截断中点
网络架构:
- 编码器:简化的 PointNet++ 模块(点卷积/1D Conv)+ 简化的 3D CNN 模块(体积卷积)
- 融合:平均池化连接两种卷积输出,提供特征网格
- 解码器:基于 MLP 的独立属性预测头
后处理流程:
- NerVE 体素 → 图搜索提取 PWL(分段线性)曲线
- 拓扑校正模块修复断裂与错误连接
- 现成样条拟合算法生成最终参数曲线(B-Spline)
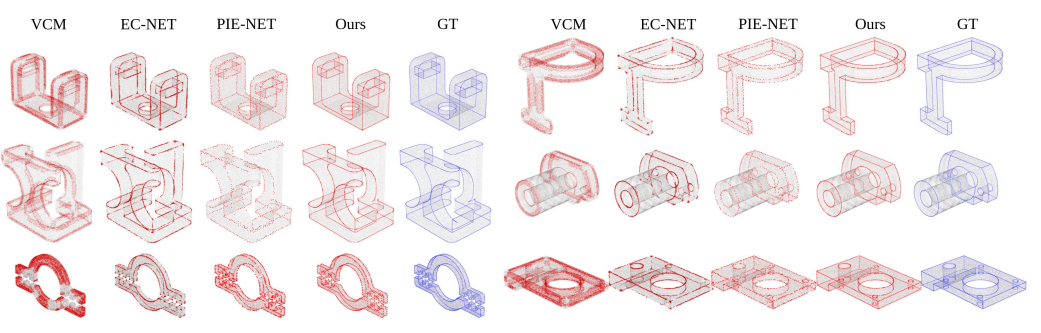
实验结果:
- 在 ABC 数据集上达到参数曲线提取的 SOTA
- 显著超越此前基于关键点拟合的方法
- 可处理包括开曲线、闭曲线、交叉曲线在内的多种拓扑
5.2.2 三维参数化线框提取 (2021)
基于距离场的方法 25:处理标量距离场(表示点到最近尖锐特征的距离),从中提取参数化线框。先于 DEF 和 NerVE,是从距离场提取曲线的早期探索。
5.3 神经隐式表示 (Neural Implicit)
5.3.1 概览
神经隐式表示用神经网络 f θ ( x ) f_\theta(x) fθ(x) 编码三维形状的隐式函数(如符号距离函数 SDF 或占据场 Occupancy),曲线通过提取其 f θ ( x ) = 0 f_\theta(x) = 0 fθ(x)=0 的等值面或等值线获得。
5.3.2 相关进展
- 含尖锐特征的隐式曲线重建 (2025) 26:最新工作,专攻编码尖锐特征的隐式表示。提出在光滑区域和尖锐特征区域使用不同策略,解决神经隐式表示模糊化尖锐边缘的问题。
- 曲率引导的神经隐式 (2025) 27:引入曲率信息增强神经隐式表面重建质量,可间接改善曲线/边缘提取。
- ANIR (2025) 28:自适应神经隐式表示,将形状分解为多个局部隐式模块,支持高质量形状重建。
5.3.3 优势与局限
- 优势:表示能力极强、连续可微、自然支持任意拓扑
- 局限:训练时间长、从隐式场中精确提取曲线仍具挑战性(等值面粗糙度、拓扑噪声)
5.4 CAD 逆向工程方法
CAD 模型的逆向工程是从点云中重建 B-Rep(边界表示)或 CSG(构造实体几何),其中包含参数曲线的显式提取。
5.4.1 ComplexGen (SIGGRAPH 2022)
- 从点云数据重建 B-Rep 格式的 CAD 表示
- 核心创新:将 B-Rep 建模为"链复形"(chain complex),通过生成式图神经网络同时预测面和边的拓扑关系
- 输出包含参数曲线(边)和参数曲面(面)的完整 CAD 模型
5.4.2 Point2CAD (CVPR 2024) --- 最新 SOTA
Liu et al. (2024) 29 来自 ETH Zurich / PRS:
- 混合分析-神经重建方案:弥合分割点云与结构化 CAD 模型之间的鸿沟
- 可与不同分割骨干网络灵活组合
- 关键创新 :提出新型自由曲面神经隐式表示用于表面拟合阶段
- 在 ABC 基准数据集上刷新 SOTA
5.4.3 该方向的意义
虽然 CAD 逆向工程的整体目标是重建三维模型(面+边+顶点),但其边重建模块本质上就是从无序点云中提取三维参数曲线,因此该方向的方法学进展直接惠及曲线拟合任务。
6. 应用领域
6.1 CAD/CAM 逆向工程
| 场景 | 输入 | 输出 | 代表方法 |
|---|---|---|---|
| 机械零件扫描 | 激光扫描点云 | B-Rep CAD 模型 | Point2CAD, ComplexGen |
| 工业设计 | 手持扫描仪点云 | NURBS 曲面+边曲线 | DEF, 传统 NURBS 拟合 |
| 3D 打印修复 | 破损物体扫描 | 参数化边+面 | EC-Net, NerVE |
6.2 电力线巡检与重建
- 输入:无人机 LiDAR 点云(含大规模、多线交错、复杂悬链线形态)
- 方法:先 RANSAC/深度学习分割 → 悬链线方程拟合 6
- 最新进展 (2026) 3031:深度学习直接点云电力线提取 + 自动三维重建
- 关键挑战:多点云线相互交错、风致摆动导致悬链线形变
6.3 医学影像 ------ 管状结构分析
- 血管中心线:DeformCL (CVPR 2025) 15 用可变形中心线端到端提取血管拓扑
- 气道树建模:支气管树的骨架提取 → 辅助手术导航
- 神经元追踪:共聚焦显微镜点云 → 神经元轴突/树突曲线重建
- 关键挑战:直径从数微米到数厘米不等、树状拓扑复杂、数据噪声大
6.4 文化遗产数字化 (HBIM)
- 历史建筑建模:从地面激光扫描(TLS)点云中提取柱廊、拱门、雕花的参数曲线 3
- 碎片拼接:通过识别陶瓷碎片的曲线轮廓参数 → 判断是否属于同一器物 → 霍夫变换方法的天然应用
- 关键挑战:点云密度不均匀、风化磨损导致曲线边缘模糊
6.5 道路与交通基础设施
- 高速公路曲线重建 (2023) 19:基于强化学习的多曲线同时拟合
- 铁轨检测:从车载 LiDAR 中提取钢轨中心线
- 隧道断面提取:环形点云 → 椭圆/圆形拟合 → 变形监测
6.6 农业与林业
- 果树骨架提取:PC-Skeletor 的 S-LBC 最初就是为樱桃树骨架化开发的 32
- 作物表型分析:从田间激光扫描提取植株三维结构 → 枝干曲线 → 生物量估算
7. 开源工具与数据集
7.1 核心开源库
| 工具 | 语言 | 功能 | 链接 |
|---|---|---|---|
| PCL | C++ | 全面的点云处理库,包含 MLS 平滑、法线估计 33 | pointclouds.org |
| Open3D | C++/Python | 现代 3D 数据处理,可视化强大,点云 I/O | open3d.org |
| CGAL | C++ | 计算几何算法库,含 Surface Reconstruction | cgal.org |
| CloudCompare | C++/GUI | 点云比较与处理,插件丰富 | cloudcompare.org |
| PC-Skeletor | Python | 点云曲线骨架提取(LBC + S-LBC)11 | github.com/meyerls/pc-skeletor |
| pyRANSAC-3D | Python | RANSAC 三维基本体拟合 5 | github.com/leomariga/pyRANSAC-3D |
| hough3d | Python | 迭代三维直线 Hough 检测 9 | pypi.org/project/hough3d |
| ALGLIB | C++/C#/Java | 全面的曲线曲面拟合算法库 18 | alglib.net |
| Learning3D | Python | 深度学习点云处理库 34 | github.com/vinits5/learning3d |
7.2 深度学习开源实现
| 方法 | 发表 | 代码地址 |
|---|---|---|
| DEF | SIGGRAPH 2022 | github.com/artonson/def |
| EC-Net | ECCV 2018 | (论文源码) |
| DeformCL | CVPR 2025 | github.com/barry664/DeformCL |
| Point2CAD | CVPR 2024 | github.com/prs-eth/point2cad |
| ComplexGen | SIGGRAPH 2022 | (论文源码) |
| NerVE | CVPR 2023 | dongdu3.github.io/projects/2023/NerVE/ |
7.3 标准数据集
| 数据集 | 规模 | 内容 | 适用任务 |
|---|---|---|---|
| ABC | 100 万+ CAD 模型 | 机械零件、参数化 B-Rep | 边缘检测、曲线提取、CAD 重建 |
| ShapeNet | 5 万+ 模型 | 常见物体点云 | 语义分割、分类 |
| ModelNet40 | 12,311 模型 | 40 类标准物体 | 分类基准 |
| ScanNet | 1,513 场景 | 真实室内 RGB-D | 场景级重建 |
| Semantic3D | 40 亿+ 点 | 大规模室外 LiDAR | 语义分割、线段提取 |
| 电力线 LiDAR | 场景依赖 | 无人机扫描输电线走廊 | 电力线提取与悬链线拟合 |
8. 方法对比分析
8.1 综合对比表
| 维度 | 传统 NURBS | MLS | RANSAC | Hough | 骨架提取 | 深度学习 |
|---|---|---|---|---|---|---|
| 精度 | ★★★★ | ★★☆ | ★★★ | ★★★ | ★★☆ | ★★★★★ |
| 鲁棒性 | ★★☆ | ★★★ | ★★★★★ | ★★★★ | ★★★ | ★★★★ |
| 拓扑通用性 | ★★ | ★★★ | ★★ | ★★ | ★★★★ | ★★★★★ |
| 输出参数曲线 | ✓ | ✗ | 部分 | ✓ | ✗ | ✓ |
| 计算效率 | ★★★★ | ★★ | ★★★ | ★★ | ★★★ | ★★ |
| 先验需求 | 高 | 低 | 中 | 高 | 低 | 低 |
| 训练需要 | 否 | 否 | 否 | 否 | 否 | 是 |
| 泛化能力 | ★★ | ★★★ | ★★ | ★★ | ★★★ | ★★★★ |
| 处理复杂曲线 | 中 | 中 | 差 | 中 | 好 | 最好 |
| 可解释性 | 高 | 高 | 高 | 高 | 高 | 低 |
8.2 选型建议
需求?
|
┌────────────────────────┼────────────────────────┐
↓ ↓ ↓
已知曲线类型 未知曲线类型 需要工业级输出
(直线/圆/螺旋线) (自由形态/复杂拓扑) (B-Rep / STEP)
│ │ │
↓ ↓ ↓
RANSAC / Hough 深度学习方法 Point2CAD /
(快速+可解释) NerVE / DEF / 神经隐式 ComplexGen
│
是否需要参数?
┌────┴────┐
↓ ↓
是 否
│ │
↓ ↓
NerVE / 骨架提取
DEF (PC-Skeletor)8.3 实验精度参考 (霍夫变换三种方法对比)
在统一测试环境下 (i7 1.3GHz, MATLAB):
| 方法 | 平均拟合误差 (MFE) | 计算时间 |
|---|---|---|
| 投影回归平面 + HT | 0.0129 | 5s |
| 全局空间曲线 HT | 0.0116 | 13s |
| 分段多项式空间曲线 HT | 0.0096 | 51s |
分段多项式方法精度最高但速度最慢,投影方法最快但精度最低。这是经典的精度-效率权衡。
9. 未来研究方向
9.1 方法论展望
- 大模型/基础模型赋能
- 类似于 NLP 和 2D 视觉,三维基础模型(如 Point-E、3D-LLM)可能从根本上改变曲线重建范式
- 预训练 → 零样本曲线提取的可行性探索
- 概率化与不确定性量化
- 当前方法多为确定性输出,缺乏对拟合可信度的估计
- 贝叶斯深度学习 / 神经过程 → 输出曲线的后验分布
- 多源融合曲线重建
- 融合 RGB 图像 + LiDAR + 结构光 → 互补信息提升曲线重建质量
- 深度学习多模态 point cloud 配准 → 曲线特征作为桥梁
- 实时/在线曲线拟合
- 面向机器人导航和 AR 应用的低延迟需求
- 边缘计算 + 轻量网络 + 增量式曲线更新
- 拓扑感知曲线提取
- 正确识别和处理曲线的分叉、环、交叉点仍是一个开放问题
- 结合拓扑数据分析 (TDA) 和图神经网络 (GNN)
- 可解释的深度学习曲线重建
- 目前深度学习方法的"黑盒"特性在工程应用中面临信任挑战
- 结合几何先验的可解释模块 (如 NerVE 将输出约束在体素网格内)
9.2 工程落地挑战
- 大规模点云处理:航空 LiDAR 单次飞行可产生数十亿点,现有深度学习方法的 batch 处理面临内存瓶颈
- 跨域泛化:在 ABC 数据集上训练的模型能否直接迁移到医学点云 → 域自适应研究
- 标准化评估:缺乏统一的曲线拟合精度评估基准(不同论文使用不同度量)
10. 参考文献
1 Dimitrov A, Golparvar-Fard M. Non-Uniform B-Spline Surface Fitting from Unordered 3D Point Clouds for As-Built Modeling. Computer-Aided Civil and Infrastructure Engineering, 2016.
2 Dimitrov A, Golparvar-Fard M. Non-Uniform B-Spline Surface Fitting from Unordered 3D Point Clouds. ScienceDirect, 2016.
3 Ivan M, et al. Fitting Curves to Point Clouds: Targeted Approximation in HBIM Applications. Journal for Geometry and Graphics, 2025.
4 Zhang W. Moving Least Squares Method and its Improvement: A Systematic Review. 2025.
5 Mariga L. pyRANSAC-3D: A Python Tool for Fitting Primitive Shapes in 3D Point Clouds. GitHub, 2022.
6 Reconstruction of Power Lines from Point Clouds. arXiv:2201.12499 , 2022; Springer LNCS, 2023.
7 Raffo A, Biasotti S. Extending the Hough Transform to Recognize and Approximate Space Curves in 3D Models. Computer Aided Geometric Design, 2024.
8 Dalitz C, et al. Iterative Hough Transform for 3D Line Detection. GitHub, 2017.
9 hough3d Python Library. PyPI, 2024.
10 Cao J, et al. Point Cloud Skeletons via Laplacian-Based Contraction. IEEE SMI, 2010.
11 Meyer L. PC-Skeletor: Skeletonization of 3D Point Clouds. GitHub/PyPI, 2023.
12 Huang H, et al. L1-Medial Skeleton of Point Cloud. ACM SIGGRAPH, 2013.
13 Lian Z, et al. Curve Skeleton Extraction From 3D Point Clouds Through Hybrid Contraction and Clustering. Computer Graphics Forum, 2020.
14 保特征的点云骨架提取算法. 图学学报, 2023.
15 DeformCL: Deformable Centerline-based 3D Vessel Extraction. CVPR 2025.
16 The Robust Vessel Segmentation and Centerline Extraction: One-stage Deep Learning Approach. MDPI J. Imaging, 2025.
17 Semi-Automatic Correction of 3D Tubular Structure Skeletons via Variational Optimization. ACM, 2025.
18 ALGLIB: Curve and Surface Fitting Library. alglib.net.
19 3D Highway Curve Reconstruction from Mobile LiDAR Point Clouds. ISPRS Archives, 2023.
20 Graph-based Point Cloud Surface Reconstruction using B-Splines. arXiv:2509.16050, 2025.
21 Yu L, et al. EC-Net: an Edge-aware Point set Consolidation Network. ECCV, 2018.
22 EDC-Net: Edge Detection Capsule Network for 3D Point Clouds. Applied Sciences, 2021.
23 Matveev A, et al. DEF: Deep Estimation of Sharp Geometric Features in 3D Shapes. ACM SIGGRAPH, 2022.
24 Du D, et al. NerVE: Neural Volumetric Edges for Parametric Curve Extraction from Point Cloud. CVPR, 2023.
25 3D Parametric Wireframe Extraction Based on Distance Fields. arXiv:2107.06165, 2021.
26 Implicit Curve Reconstruction with Sharp Features. Computers & Graphics, 2025.
27 Enhancing Surface Neural Implicits with Curvature-Guided Training. Springer LNCS, 2025.
28 ANIR: Adaptive Neural Implicit Representation for 3D Shape Reconstruction. CAGD, 2025.
29 Liu Y, Obukhov A, Wegner J D, Schindler K. Point2CAD: Reverse Engineering CAD Models from 3D Point Clouds. CVPR, 2024.
30 Extraction of Power Line Based on Point Cloud by Using Deep Learning. IEEE, 2024.
31 Automated Power Line Recognition and 3D Reconstruction. Frontiers in Energy Research, 2026.
32 Meyer L, et al. CherryPicker: Semantic Skeletonization and Topological Reconstruction of Cherry Trees. arXiv:2304.04708, 2023.
33 PCL: Point Cloud Library. pointclouds.org.
34 Learning3D: A Modern Library for Deep Learning on 3D Point Clouds Data. GitHub.