当数据有限时,把物理定律"写进"神经网络,让模型学会"按规矩办事"。
一、研究背景:盾构沉降预测为什么需要 PINN?
城市地铁建设中,盾构隧道施工不可避免地会引起地表沉降。准确预测沉降量对工程安全至关重要------沉降过大可能导致建筑物开裂、管线损坏,甚至地面塌陷。
传统做法依赖 Verruijt-Booker(1996)弹性解析解来描述横向沉降槽的形态,利用经验公式估算隧道开挖引起的地层损失参数。然而,这些物理参数(如径向位移因子和椭圆化位移因子)的演化规律往往需要大量历史监测数据来校准。
纯数据驱动神经网络(DNN)虽然能拟合已有数据,却存在一个致命的工程难题:外推能力差。当盾构机推进到训练数据覆盖范围之外的开挖阶段时,DNN 的预测误差会急剧放大,这对工程预警而言是不可接受的。
物理信息神经网络(Physics-Informed Neural Network, PINN) 提供了一种优雅的解决方案:将物理定律作为"硬约束"嵌入模型架构,使模型在数据稀缺的情况下依然遵守物理规律。本文通过一个经过科学构造的合成案例,展示了 PINN 在盾构沉降外推预测中的压倒性优势。
二、技术路线与算法架构
2.1 整体研究路线
#mermaid-svg-WkH2PUAprthESiYy{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}@keyframes edge-animation-frame{from{stroke-dashoffset:0;}}@keyframes dash{to{stroke-dashoffset:0;}}#mermaid-svg-WkH2PUAprthESiYy .edge-animation-slow{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 50s linear infinite;stroke-linecap:round;}#mermaid-svg-WkH2PUAprthESiYy .edge-animation-fast{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 20s linear infinite;stroke-linecap:round;}#mermaid-svg-WkH2PUAprthESiYy .error-icon{fill:#552222;}#mermaid-svg-WkH2PUAprthESiYy .error-text{fill:#552222;stroke:#552222;}#mermaid-svg-WkH2PUAprthESiYy .edge-thickness-normal{stroke-width:1px;}#mermaid-svg-WkH2PUAprthESiYy .edge-thickness-thick{stroke-width:3.5px;}#mermaid-svg-WkH2PUAprthESiYy .edge-pattern-solid{stroke-dasharray:0;}#mermaid-svg-WkH2PUAprthESiYy .edge-thickness-invisible{stroke-width:0;fill:none;}#mermaid-svg-WkH2PUAprthESiYy .edge-pattern-dashed{stroke-dasharray:3;}#mermaid-svg-WkH2PUAprthESiYy .edge-pattern-dotted{stroke-dasharray:2;}#mermaid-svg-WkH2PUAprthESiYy .marker{fill:#333333;stroke:#333333;}#mermaid-svg-WkH2PUAprthESiYy .marker.cross{stroke:#333333;}#mermaid-svg-WkH2PUAprthESiYy svg{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;}#mermaid-svg-WkH2PUAprthESiYy p{margin:0;}#mermaid-svg-WkH2PUAprthESiYy .label{font-family:"trebuchet ms",verdana,arial,sans-serif;color:#333;}#mermaid-svg-WkH2PUAprthESiYy .cluster-label text{fill:#333;}#mermaid-svg-WkH2PUAprthESiYy .cluster-label span{color:#333;}#mermaid-svg-WkH2PUAprthESiYy .cluster-label span p{background-color:transparent;}#mermaid-svg-WkH2PUAprthESiYy .label text,#mermaid-svg-WkH2PUAprthESiYy span{fill:#333;color:#333;}#mermaid-svg-WkH2PUAprthESiYy .node rect,#mermaid-svg-WkH2PUAprthESiYy .node circle,#mermaid-svg-WkH2PUAprthESiYy .node ellipse,#mermaid-svg-WkH2PUAprthESiYy .node polygon,#mermaid-svg-WkH2PUAprthESiYy .node path{fill:#ECECFF;stroke:#9370DB;stroke-width:1px;}#mermaid-svg-WkH2PUAprthESiYy .rough-node .label text,#mermaid-svg-WkH2PUAprthESiYy .node .label text,#mermaid-svg-WkH2PUAprthESiYy .image-shape .label,#mermaid-svg-WkH2PUAprthESiYy .icon-shape .label{text-anchor:middle;}#mermaid-svg-WkH2PUAprthESiYy .node .katex path{fill:#000;stroke:#000;stroke-width:1px;}#mermaid-svg-WkH2PUAprthESiYy .rough-node .label,#mermaid-svg-WkH2PUAprthESiYy .node .label,#mermaid-svg-WkH2PUAprthESiYy .image-shape .label,#mermaid-svg-WkH2PUAprthESiYy .icon-shape .label{text-align:center;}#mermaid-svg-WkH2PUAprthESiYy .node.clickable{cursor:pointer;}#mermaid-svg-WkH2PUAprthESiYy .root .anchor path{fill:#333333!important;stroke-width:0;stroke:#333333;}#mermaid-svg-WkH2PUAprthESiYy .arrowheadPath{fill:#333333;}#mermaid-svg-WkH2PUAprthESiYy .edgePath .path{stroke:#333333;stroke-width:2.0px;}#mermaid-svg-WkH2PUAprthESiYy .flowchart-link{stroke:#333333;fill:none;}#mermaid-svg-WkH2PUAprthESiYy .edgeLabel{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-WkH2PUAprthESiYy .edgeLabel p{background-color:rgba(232,232,232, 0.8);}#mermaid-svg-WkH2PUAprthESiYy .edgeLabel rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-WkH2PUAprthESiYy .labelBkg{background-color:rgba(232, 232, 232, 0.5);}#mermaid-svg-WkH2PUAprthESiYy .cluster rect{fill:#ffffde;stroke:#aaaa33;stroke-width:1px;}#mermaid-svg-WkH2PUAprthESiYy .cluster text{fill:#333;}#mermaid-svg-WkH2PUAprthESiYy .cluster span{color:#333;}#mermaid-svg-WkH2PUAprthESiYy div.mermaidTooltip{position:absolute;text-align:center;max-width:200px;padding:2px;font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:12px;background:hsl(80, 100%, 96.2745098039%);border:1px solid #aaaa33;border-radius:2px;pointer-events:none;z-index:100;}#mermaid-svg-WkH2PUAprthESiYy .flowchartTitleText{text-anchor:middle;font-size:18px;fill:#333;}#mermaid-svg-WkH2PUAprthESiYy rect.text{fill:none;stroke-width:0;}#mermaid-svg-WkH2PUAprthESiYy .icon-shape,#mermaid-svg-WkH2PUAprthESiYy .image-shape{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-WkH2PUAprthESiYy .icon-shape p,#mermaid-svg-WkH2PUAprthESiYy .image-shape p{background-color:rgba(232,232,232, 0.8);padding:2px;}#mermaid-svg-WkH2PUAprthESiYy .icon-shape .label rect,#mermaid-svg-WkH2PUAprthESiYy .image-shape .label rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-WkH2PUAprthESiYy .label-icon{display:inline-block;height:1em;overflow:visible;vertical-align:-0.125em;}#mermaid-svg-WkH2PUAprthESiYy .node .label-icon path{fill:currentColor;stroke:revert;stroke-width:revert;}#mermaid-svg-WkH2PUAprthESiYy :root{--mermaid-font-family:"trebuchet ms",verdana,arial,sans-serif;} Verruijt-Booker 解析解
合成监测数据生成
训练/测试数据划分
训练纯数据DNN
训练硬约束PINN
外推性能对比评估
可视化分析与结论
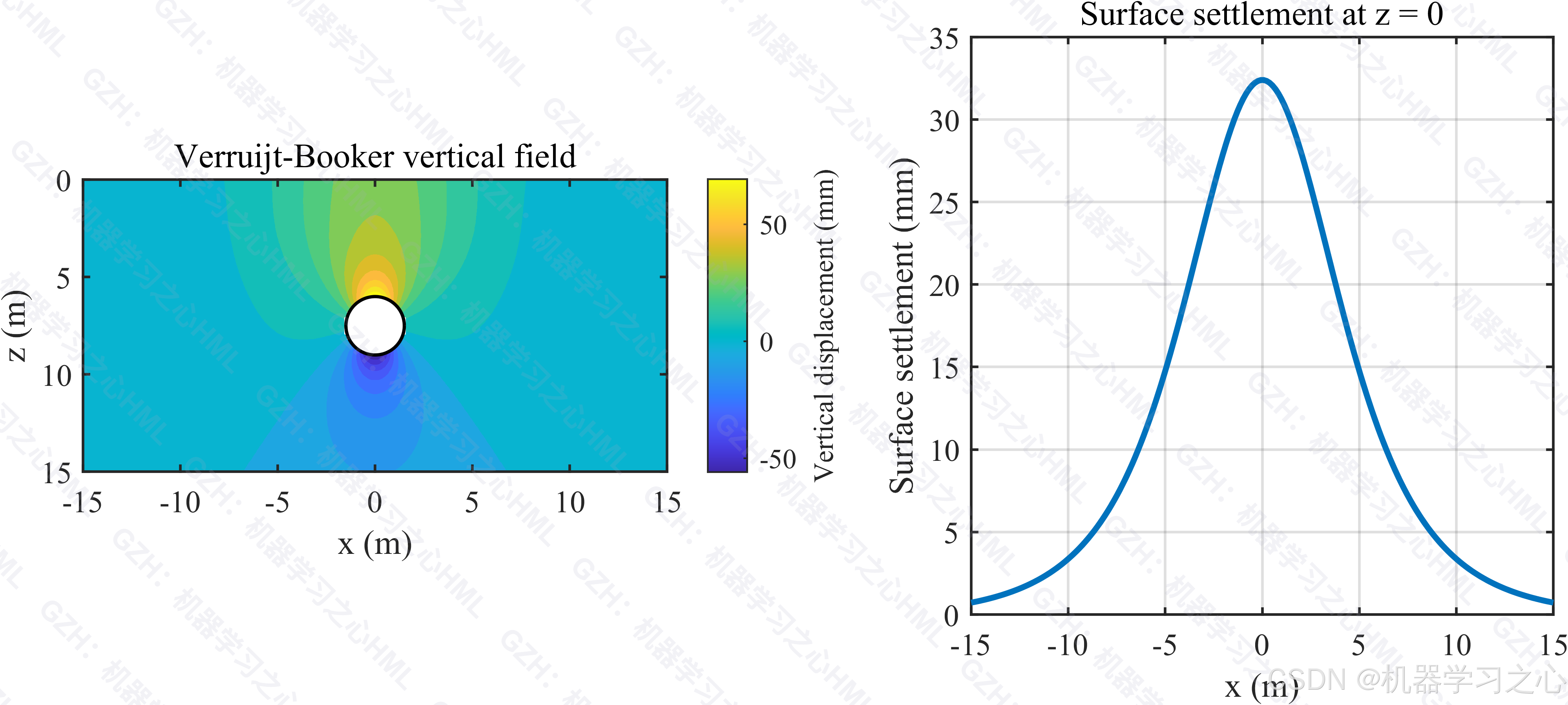
2.2 核心物理公式:Verruijt-Booker 沉降解
隧道开挖引起的地表沉降由两部分变形机制叠加而成:
uz(x,z=0)=2⋅ur⋅r3⋅m+1m⋅hx2+h2−2⋅ue⋅r3⋅h(x2−h2)(x2+h2)2 u_z(x, z=0) = 2 \cdot u_r \cdot r^3 \cdot \frac{m+1}{m} \cdot \frac{h}{x^2 + h^2}- 2 \cdot u_e \cdot r^3 \cdot \frac{h(x^2 - h^2)}{(x^2 + h^2)^2} uz(x,z=0)=2⋅ur⋅r3⋅mm+1⋅x2+h2h−2⋅ue⋅r3⋅(x2+h2)2h(x2−h2)
其中:
m=11−2ν m = \frac{1}{1-2\nu} m=1−2ν1
| 符号 | 物理含义 | 单位 |
|---|---|---|
| uzu_zuz | 地表竖向位移 | m |
| uru_rur | 径向位移因子(均匀收缩 δ) | m |
| ueu_eue | 椭圆化位移因子(椭圆化 ε) | m |
| rrr | 隧道半径 | m |
| hhh | 隧道轴线埋深 | m |
| ν\nuν | 土体泊松比 | 无量纲 |
| xxx | 距隧道轴线的水平距离 | m |
最终沉降值:s=1000⋅uzs = 1000 \cdot u_zs=1000⋅uz(转换为毫米,正值表示下沉)。
2.3 PINN 模型设计:硬物理约束 + 小参数学习
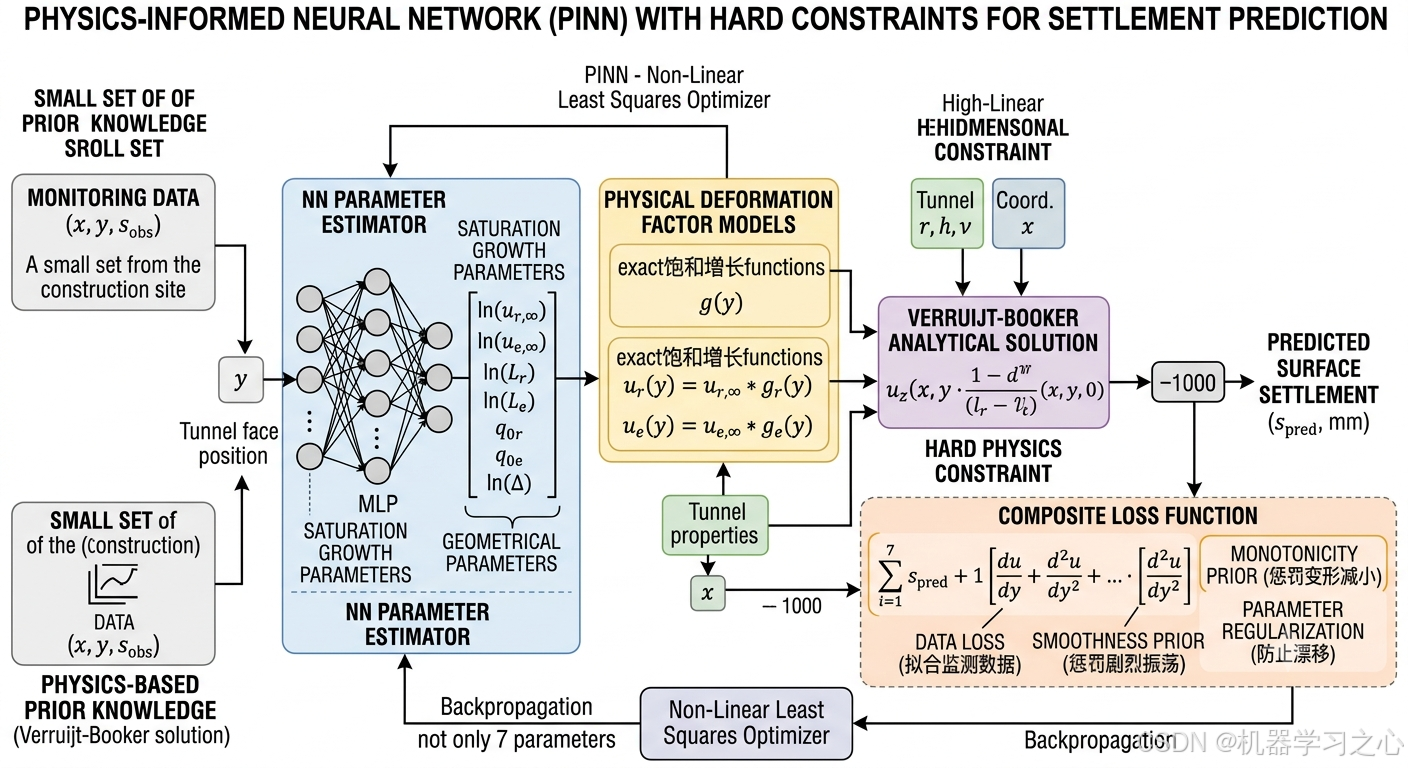
与传统 PINN 不同,本研究采用 "硬物理约束"(Hard Physics Constraint) 策略:神经网络不直接输出沉降值,而是输出 Verruijt-Booker 方程的物理参数------位移因子 ur(y)u_r(y)ur(y) 和 ue(y)u_e(y)ue(y),然后通过解析公式严格计算沉降。
位移因子演化模型采用饱和增长函数:
g(y)=g0+(1−g0)⋅1−exp(−max(y+Δ,0)L) g(y) = g_0 + (1-g_0) \cdot \left1 - \\exp\\left(-\\frac{\\max(y+\\Delta, 0)}{L}\\right)\\right g(y)=g0+(1−g0)⋅1−exp(−Lmax(y+Δ,0))
ur(y)=ur,∞⋅gr(y),ue(y)=ue,∞⋅ge(y) u_r(y) = u_{r,\infty} \cdot g_r(y), \quad u_e(y) = u_{e,\infty} \cdot g_e(y) ur(y)=ur,∞⋅gr(y),ue(y)=ue,∞⋅ge(y)
其中 yyy 为掌子面到监测断面的距离。该函数具有以下物理特征:
- 非负初始值 :掌子面到达前已开始变形(g0>0g_0 > 0g0>0)
- 单调递增:随掌子面远离,变形逐渐增大
- 渐近饱和 :当 y→∞y \to \inftyy→∞ 时 g(y)→1g(y) \to 1g(y)→1,变形趋于稳定
PINN 共有 7 个可训练参数:
| 参数 | 含义 | 约束方式 |
|---|---|---|
| ln(ur,∞)\ln(u_{r,\infty})ln(ur,∞) | 径向位移渐近值对数 | exp\expexp 确保正值 |
| ln(ue,∞)\ln(u_{e,\infty})ln(ue,∞) | 椭圆化位移渐近值对数 | exp\expexp 确保正值 |
| ln(Lr)\ln(L_r)ln(Lr) | 径向饱和增长特征长度对数 | exp\expexp 确保正值 |
| ln(Le)\ln(L_e)ln(Le) | 椭圆化特征长度对数 | exp\expexp 确保正值 |
| q0rq_{0r}q0r | 径向初始值的 logit | sigmoid → (0.05, 0.90) |
| q0eq_{0e}q0e | 椭圆化初始值的 logit | sigmoid → (0.05, 0.90) |
| ln(Δ)\ln(\Delta)ln(Δ) | 纵向偏移量对数 | exp\expexp 确保正值 |
2.4 复合损失函数
PINN 的优化目标由四部分残差加权组成:
L=∥spred−sobsσdata∥2⏟数据残差+w1⋅∥d2udy2∥2⏟光滑性先验+w2⋅∥min(dudy,0)∥2⏟单调性先验+w3⋅∥p∥2⏟参数正则化 \mathcal{L} = \underbrace{\left\|\frac{s_{\text{pred}} - s_{\text{obs}}}{\sigma_{\text{data}}}\right\|^2}{\text{数据残差}}+ w_1 \cdot \underbrace{\left\|\frac{d^2u}{dy^2}\right\|^2}{\text{光滑性先验}}+ w_2 \cdot \underbrace{\left\|\min\left(\frac{du}{dy}, 0\right)\right\|^2}{\text{单调性先验}}+ w_3 \cdot \underbrace{\|p\|^2}{\text{参数正则化}} L=数据残差 σdataspred−sobs 2+w1⋅光滑性先验 dy2d2u 2+w2⋅单调性先验 min(dydu,0) 2+w3⋅参数正则化 ∥p∥2
- 数据残差:拟合监测数据
- 光滑性先验:惩罚位移因子曲线的剧烈振荡(物理上应光滑演化)
- 单调性先验:只惩罚位移因子减小的情况(物理上变形应单调增长)
- 参数正则化:弱 L2 约束,防止参数漂移到非物理区域
2.5 DNN 基线模型
作为对比,纯数据驱动 DNN 采用标准多层感知机(MLP)架构:
输入层: [x, y] → 隐藏层1: 6个神经元(tanh) → 隐藏层2: 6个神经元(tanh) → 输出层: 1个神经元(线性)共计 67 个可训练参数,使用与 PINN 相同的非线性最小二乘优化器(lsqnonlin)训练,并采用 Z-score 标准化预处理。
三、参数设定与实验配置
3.1 隧道几何与地质力学参数
| 参数 | 数值 | 说明 |
|---|---|---|
| 隧道半径 rrr | 3.5 m | 典型地铁盾构隧道 |
| 轴线埋深 hhh | 31.0 m | 参考伦敦盾构案例 |
| 泊松比 ν\nuν | 0.20 | 典型砂土/硬黏土 |
| 杨氏模量 EEE | 15.0 MPa | 用于参考 |
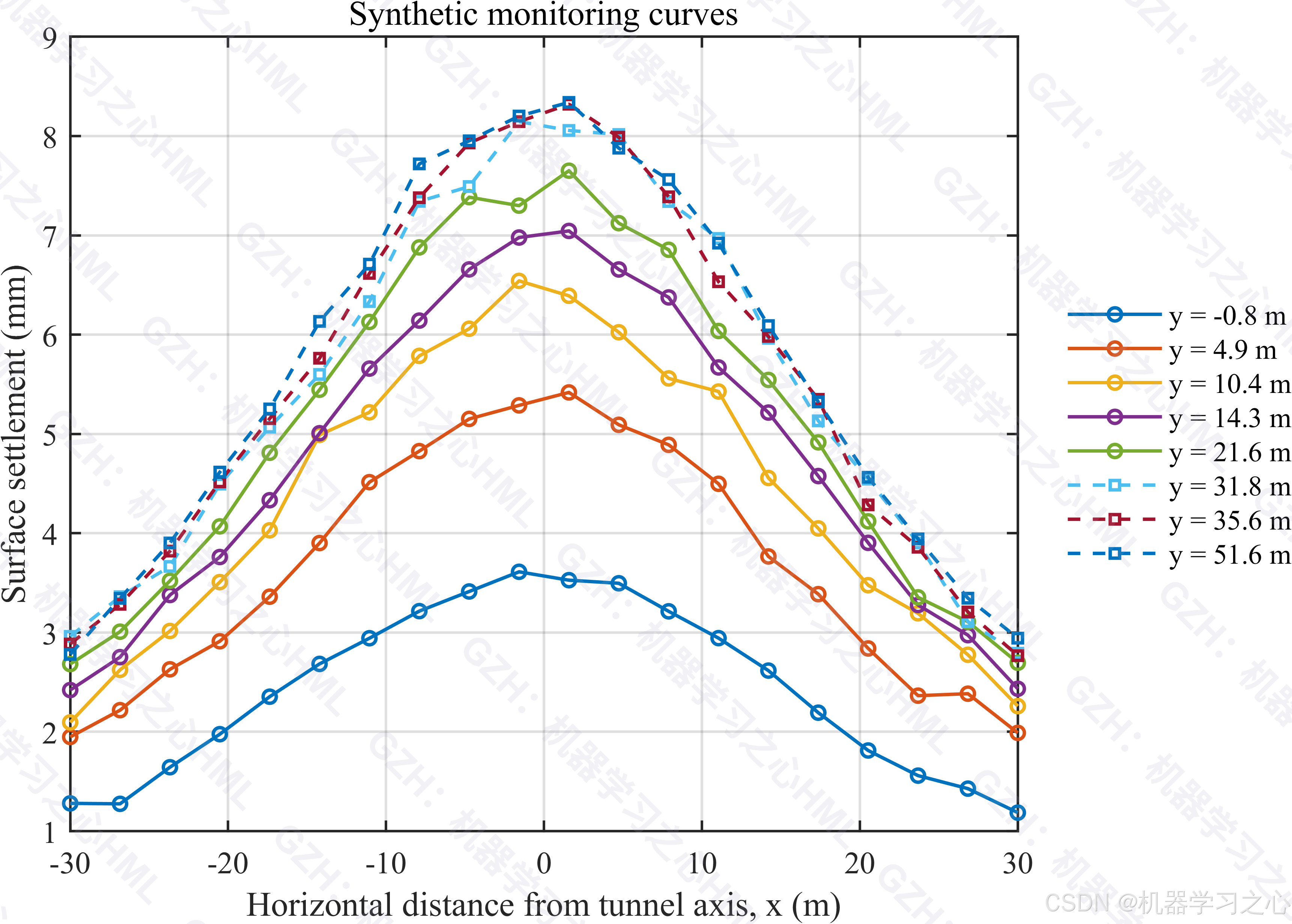
3.2 监测数据配置
| 配置项 | 设定 |
|---|---|
| 横向监测点 | -30 m 至 30 m,等间距 20 个点 |
| 纵向掌子面位置 | 8 个开挖阶段:-0.8, 4.9, 10.4, 14.3, 21.6, 31.8, 35.6, 51.6 m |
| 总数据点数 | 160(20×8) |
| 训练集 | 前 5 个阶段(y ≤ 21.6 m),共 100 点 |
| 测试集 | 后 3 个阶段(y > 21.6 m),共 60 点 |
| 观测噪声 | 异方差高斯噪声:σ=0.06+0.012⋅s\sigma = 0.06 + 0.012 \cdot sσ=0.06+0.012⋅s mm |
3.3 优化器配置
| 配置项 | PINN | DNN |
|---|---|---|
| 优化算法 | lsqnonlin(非线性最小二乘) |
lsqnonlin |
| 最大迭代次数 | 220 | 180 |
| 参数数量 | 7 | 67 |
| 参数初始化 | 物理引导初值 | 随机初始化(σ=0.25\sigma=0.25σ=0.25) |
3.4 运行环境
- 编程平台: MATLAB R2024a+
- 核心依赖 : Optimization Toolbox(
lsqnonlin求解器) - 运行时间: < 5 秒(CPU 单核)
- 随机种子 : 固定为
20260619(Mersenne Twister),确保结果可复现
四、实验结果与分析
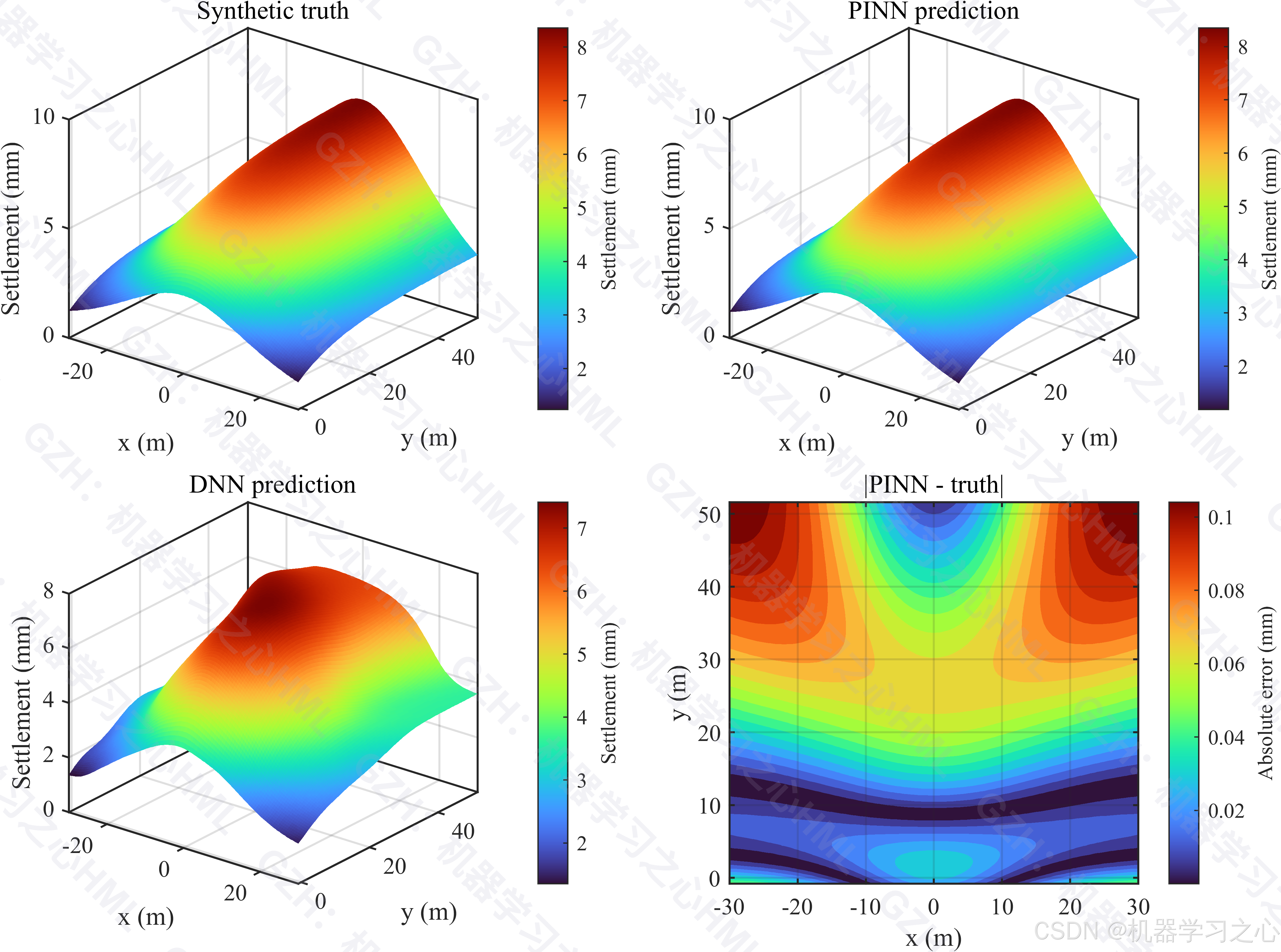
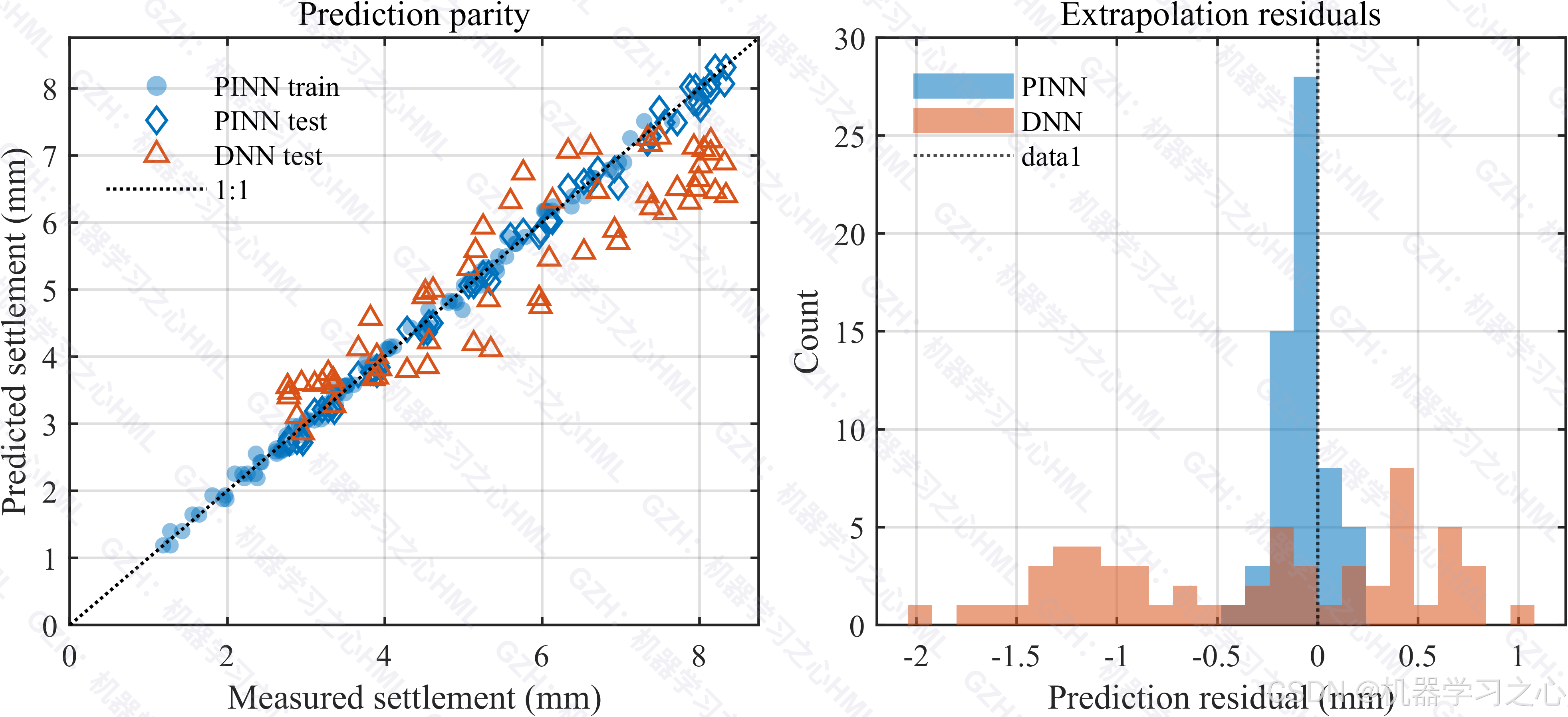
4.1 整体外推性能对比
| 指标 | PINN | DNN |
|---|---|---|
| RMSE (均方根误差) | 0.14 mm | 0.85 mm |
| MAE (平均绝对误差) | 0.12 mm | 0.72 mm |
| MAPE (平均百分比误差) | 2.28% | 12.61% |
| R² (决定系数) | 0.9940 | 0.7881 |
PINN 在所有指标上全面碾压 DNN。尤其值得注意的是:PINN 的 RMSE(0.14 mm)已经接近测量噪声水平(~0.06-0.12 mm),说明模型已将监测数据中可提取的物理信息几乎完全捕获;而 DNN 的误差高达 0.85 mm,是 PINN 的 6 倍。
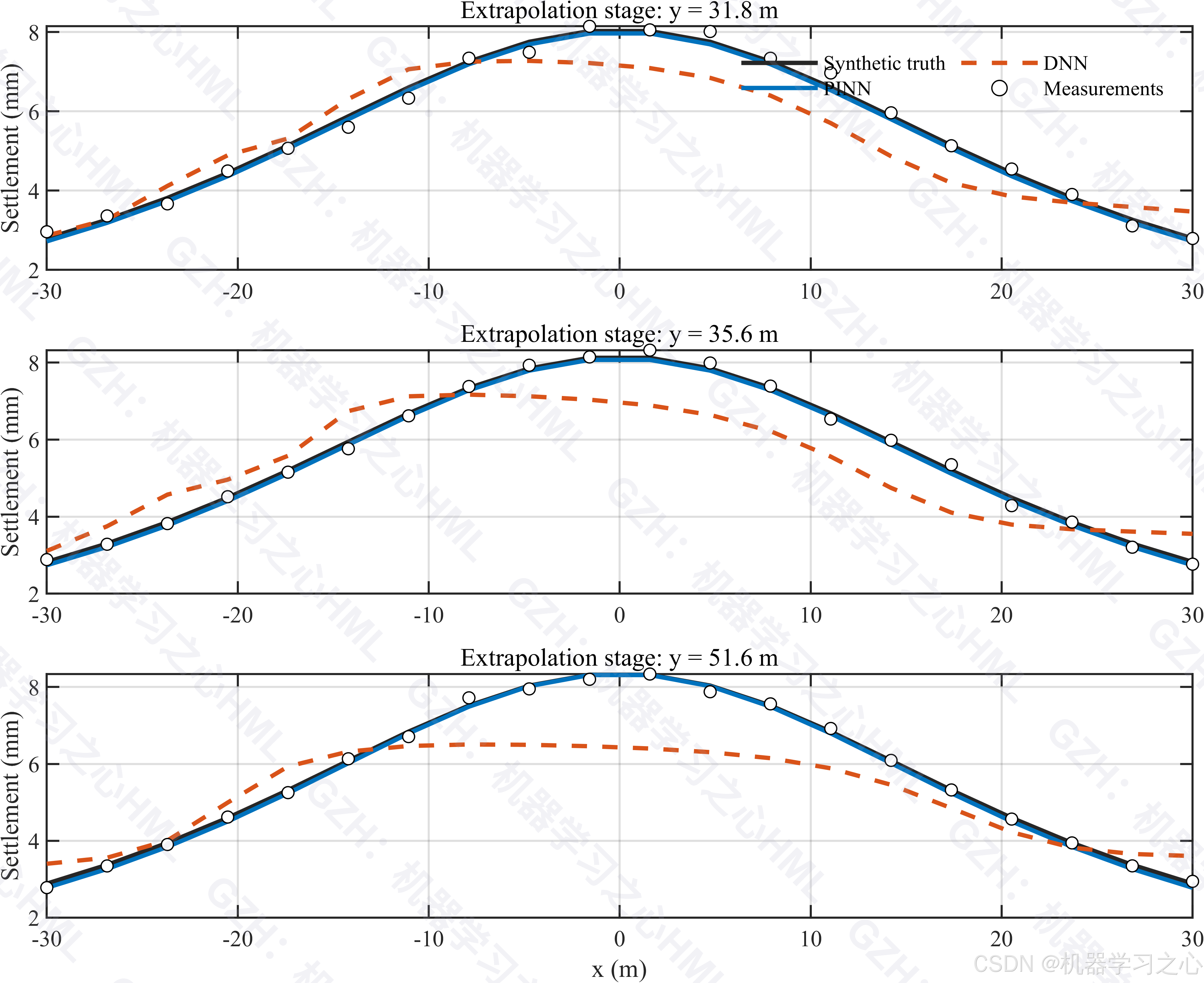
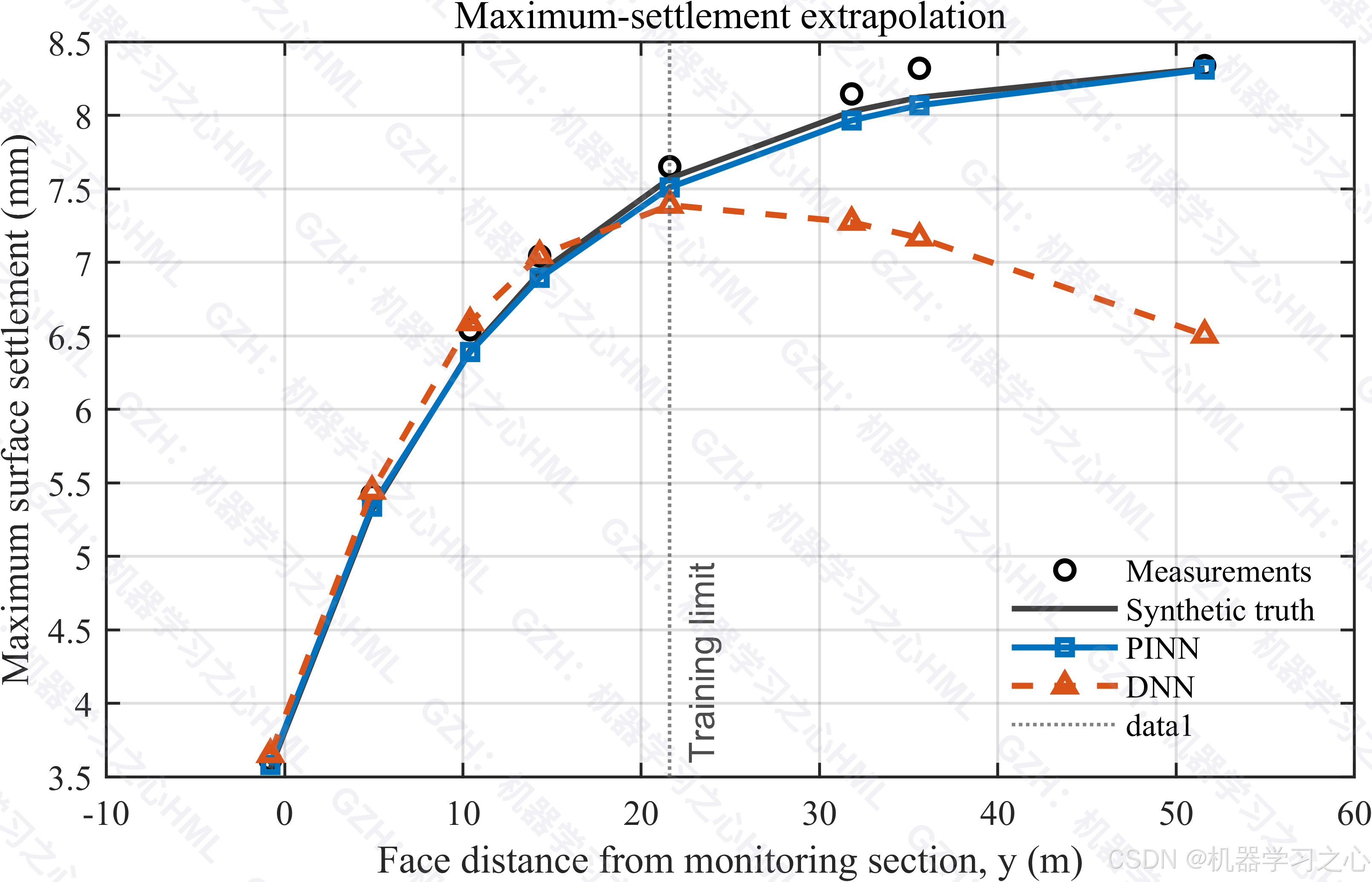
4.2 逐阶段最大沉降对比
| 掌子面距离 y (m) | 数据集 | 观测值 (mm) | PINN (mm) | DNN (mm) | PINN 误差% | DNN 误差% |
|---|---|---|---|---|---|---|
| -0.8 | 训练 | 3.61 | 3.58 | 3.65 | 0.84 | 1.15 |
| 4.9 | 训练 | 5.42 | 5.34 | 5.44 | 1.47 | 0.49 |
| 10.4 | 训练 | 6.54 | 6.39 | 6.59 | 2.31 | 0.75 |
| 14.3 | 训练 | 7.04 | 6.90 | 7.05 | 2.12 | 0.05 |
| 21.6 | 训练 | 7.65 | 7.51 | 7.39 | 1.84 | 3.42 |
| 31.8 | 外推 | 8.15 | 7.97 | 7.27 | 2.21 | 10.71 |
| 35.6 | 外推 | 8.32 | 8.07 | 7.17 | 3.02 | 13.87 |
| 51.6 | 外推 | 8.34 | 8.31 | 6.51 | 0.31 | 21.98 |
关键发现:
- 在训练域内(前 5 个阶段),DNN 和 PINN 表现接近,最大误差均控制在 4% 以内
- 一旦进入外推域(后 3 个阶段),DNN 迅速崩溃------在 y = 51.6 m 处误差高达 22%,严重低估沉降量
- PINN 在外推域保持稳定:即使在最远端 y = 51.6 m,误差仅为 0.31%
4.3 为什么 DNN 外推失败?
DNN 的外推失败源于其本质缺陷:它是一个纯数据驱动的黑箱映射 f(x,y)→sf(x, y) \to sf(x,y)→s。当 (x,y)(x, y)(x,y) 超出训练数据覆盖范围时,神经网络的非线性外推完全不受控制------它可能产生与物理规律完全矛盾的预测(例如,本应继续增大的沉降被错误地预测为减小)。
而 PINN 通过 Verruijt-Booker 方程的硬约束,将外推问题转化为位移因子的饱和增长外推------由于饱和增长函数本身就是单调、有界、渐近的,PINN 的外推天然遵守物理规律。
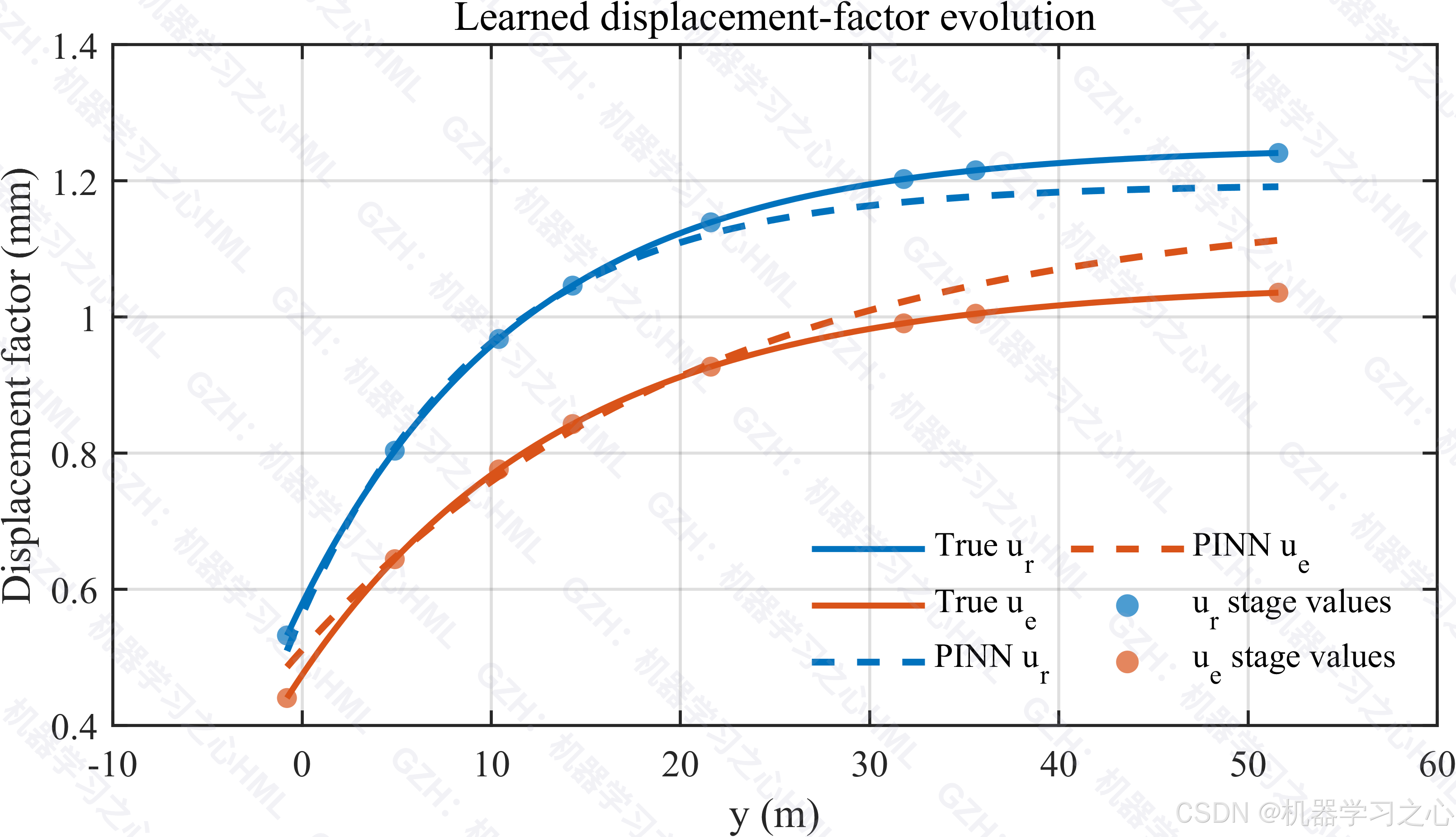
五、位移因子演化曲线的物理洞察
PINN 学习到的位移因子曲线揭示了一个关键的物理现象:
- 径向收缩(uru_rur) 和 椭圆化变形(ueu_eue) 具有不同的演化速率和渐近幅值------两种变形模式并非同步发展
- 位移因子在盾构掌子面到达监测断面之前 即开始增长(初始值 g0≈0.3g_0 \approx 0.3g0≈0.3 左右),反映了"掌子面前方先行沉降"的工程现象
- 变形增长在掌子面离开约 30-40 m 后趋于饱和,与工程实践中"沉降稳定距离约为 2-3 倍隧道直径"的经验规律一致
这些物理洞察是纯数据驱动模型无法提供的------因为它们来自于 PINN 将物理规律编码进模型架构的设计。
六、应用场景与工程价值
6.1 适用场景
| 场景 | PINN 适用性 | 说明 |
|---|---|---|
| 施工早期沉降预警 | ⭐⭐⭐⭐⭐ | 利用少量早期数据即可准确预测远期最大沉降 |
| 盾构参数实时优化 | ⭐⭐⭐⭐ | 预测沉降敏感区的地层响应,指导盾构参数调整 |
| 多断面联合预测 | ⭐⭐⭐⭐ | 模型可扩展至多个监测断面的联合校准 |
| 缺少历史数据的工程 | ⭐⭐⭐⭐⭐ | 物理先验使模型在数据稀缺时依然可靠 |
| 极端工况外推 | ⭐⭐⭐ | 物理约束提供安全性保证,但需结合工程判断 |
6.2 工程优势
- 数据效率极高:仅需 7 个参数(vs. DNN 的 67 个),极大降低了过拟合风险
- 物理可解释性:每个参数都有明确的物理含义,工程师可以理解和验证
- 外推安全性:物理约束确保外推结果不会出现非物理预测
- 计算轻量:CPU 单核 < 5 秒完成训练,可集成到实时监控系统
- 噪声鲁棒:即使在含噪观测数据上,PINN 也能有效提取物理信号
6.3 局限性与未来方向
- 当前模型假设地层为均质各向同性弹性介质------对于复杂地层(层状土、各向异性),需要扩展物理模型
- 位移因子的演化仅建模为掌子面距离的函数,未考虑盾构施工参数(推进速度、土仓压力、注浆量等)的实时影响
- 未来可将施工参数纳入模型,构建 Operation-aware PINN,实现更精细的施工控制
七、总结
本研究通过一个严谨的合成案例,系统展示了物理信息神经网络(PINN)在盾构隧道地表沉降预测中的核心优势:
将物理定律编码进模型架构,而非仅依赖数据拟合,是提升工程 AI 外推可靠性的关键路径。
7 个物理参数的 PINN 在外推域上的表现全面超越了 67 个参数的黑箱 DNN------这一结果清晰地表明:在工程 AI 中,"知道规则"比"记住答案"重要得多。
本文实验代码基于 MATLAB 实现,关键算法步骤包括:(1)Verruijt-Booker 弹性解析解的数值实现;(2)合成监测数据的科学生成与噪声建模;(3)硬物理约束 PINN 的饱和增长参数化设计;(4)复合损失函数中数据残差与物理先验的加权平衡;(5)基于非线性最小二乘的参数优化流程。全部结果可复现,随机种子固定为 20260619。