正交性
a)大地图
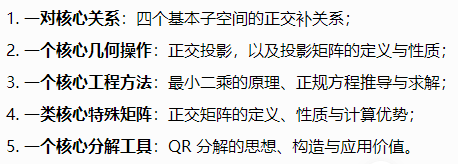
1)全章主线:以正交性为核心线索,从向量正交升级到子空间正交,赋予上章抽象的向量空间可计算的几何结构。以此为基础推导正交投影、最小二乘法,解决无解超定方程组的最优近似问题。再通过标准正交基、正交矩阵大幅简化计算、提升数值稳定性。最后给出正交化构造方法(格拉姆-施密特)与矩阵分解(QR分解),实现理论工具闭环,衔接后续的特征值、SVD等核心内容。
2)节链思路
3)本章重点
正交空间与子空间
a)本节背景:前两章解决了线性结构问题(向量空间、基、四个基本子空间、逆矩阵)。但存在三个核心问题:
1)普通线性无关基对应斜坐标系,坐标求解、矩阵运算复杂度高;
2)无法处理工程中普遍存在的超定无解方程组;
3)未知四个基本子空间的几何位置关系。
b)正交基
1)正交基定义:若一组基中任意两个向量都相互垂直,则称这组基为正交基。
2)标准正交基(最优基)定义:正交+单位长度。
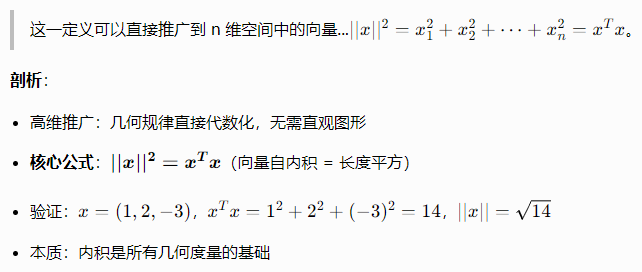
3)n维向量长度与矩阵表示
c)正交向量
1)勾股定理向向量模长推广

2)内积(点积)定义

3)内积符号与向量夹角的关系

4)向量长度与零向量特性

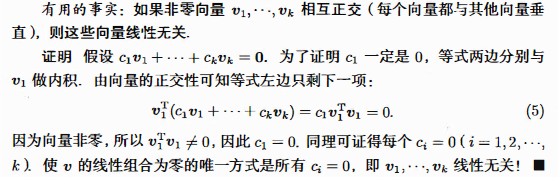
5)正交非零向量组的线性无关性
6)标准正交积

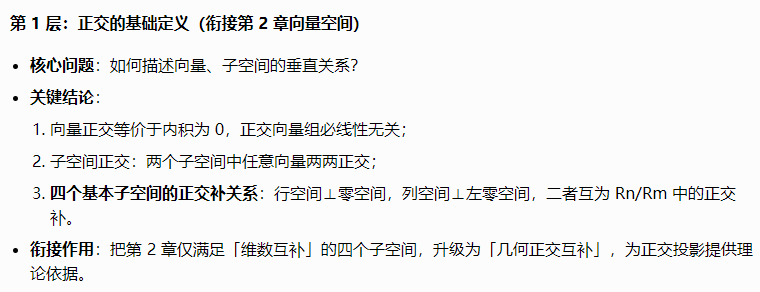
d)正交子空间
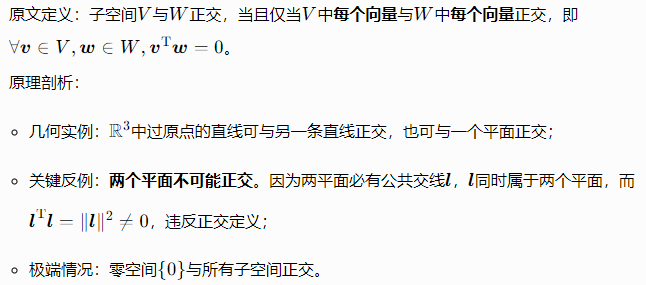
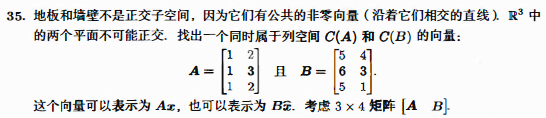
1)本小节背景:本节是正交向量向子空间的推广,解决两个子空间整体垂直的判定与性质问题。通过引入R3中直线、平面的直观几何,纠正了垂直平面即正交子空间的直觉错误,最终建立正交性的基本定理。
2)正交子空间的定义
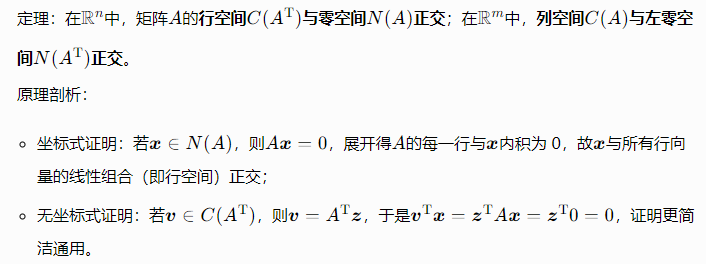
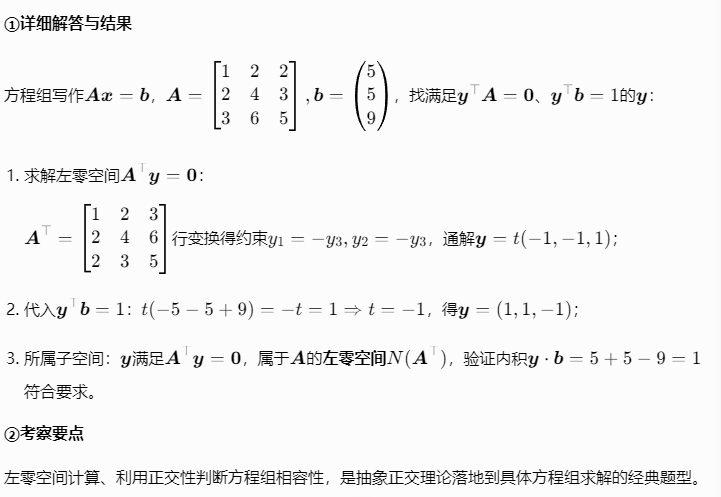
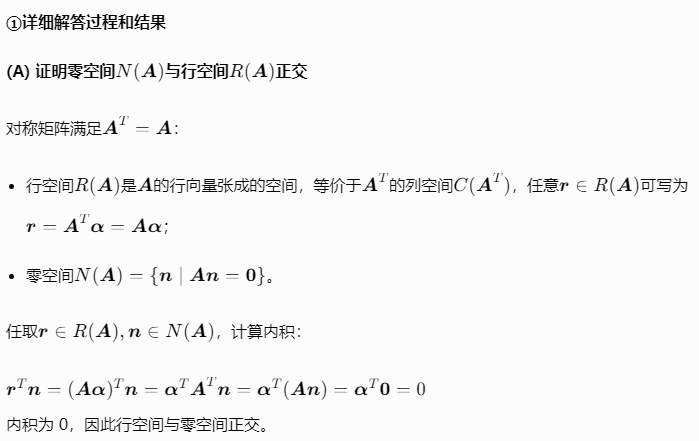
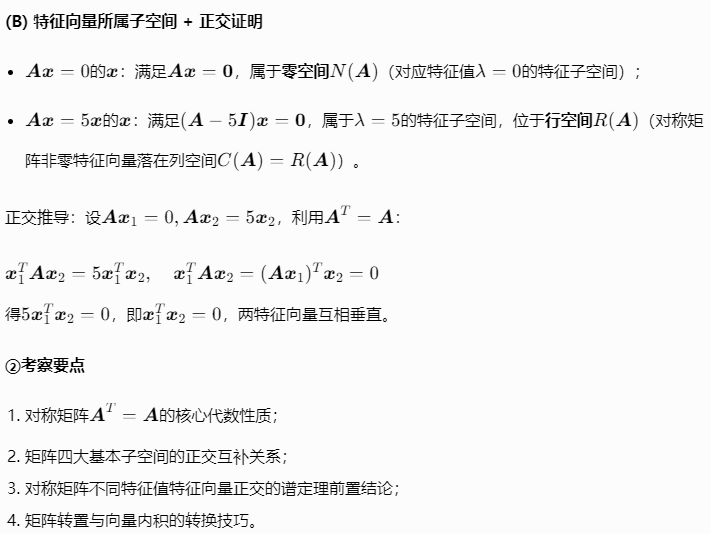
3)正交性基本定理
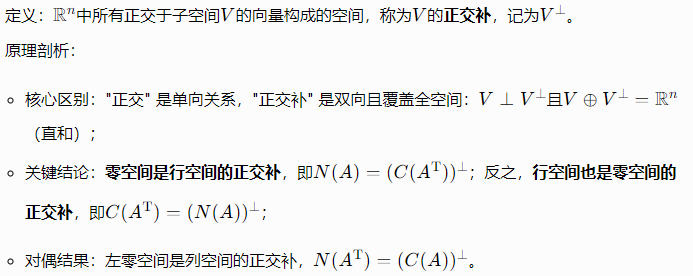
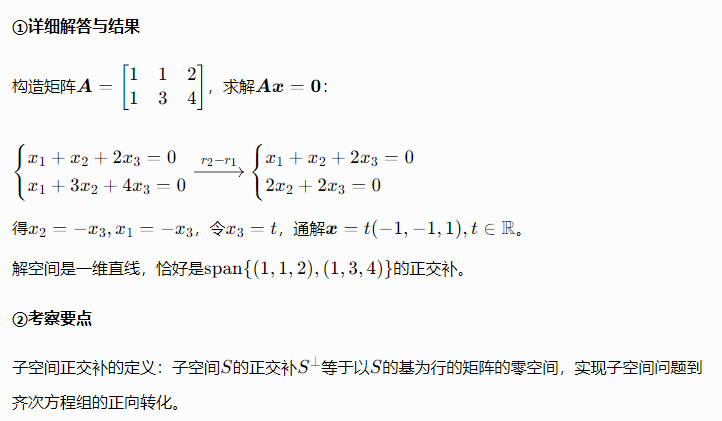
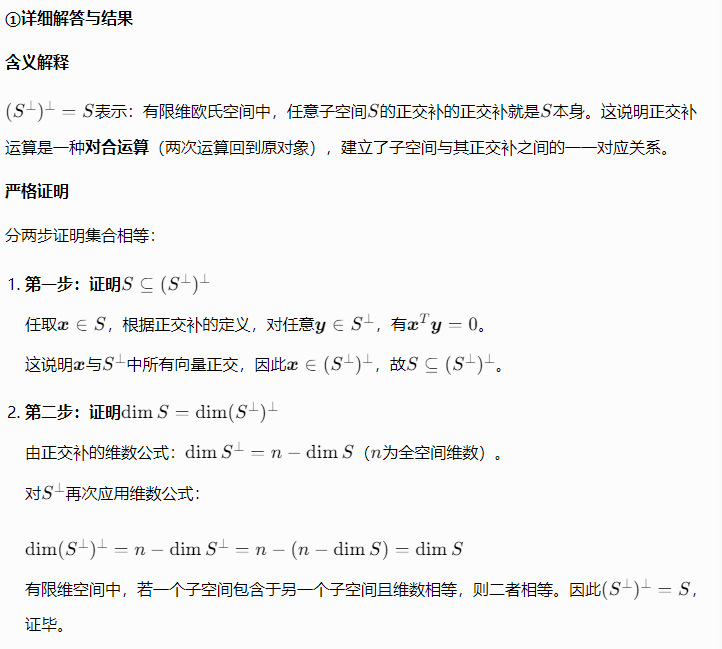
4)正交补的定义和性质
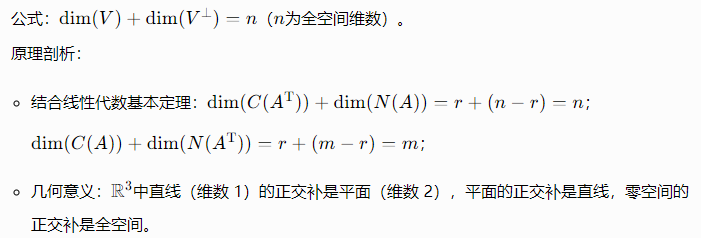
5)维数互补公式
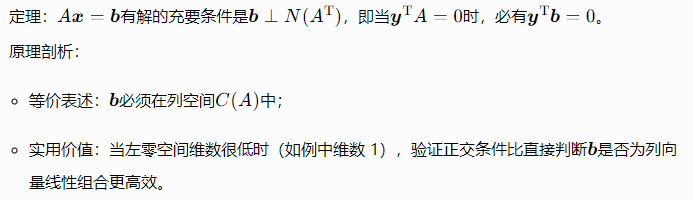
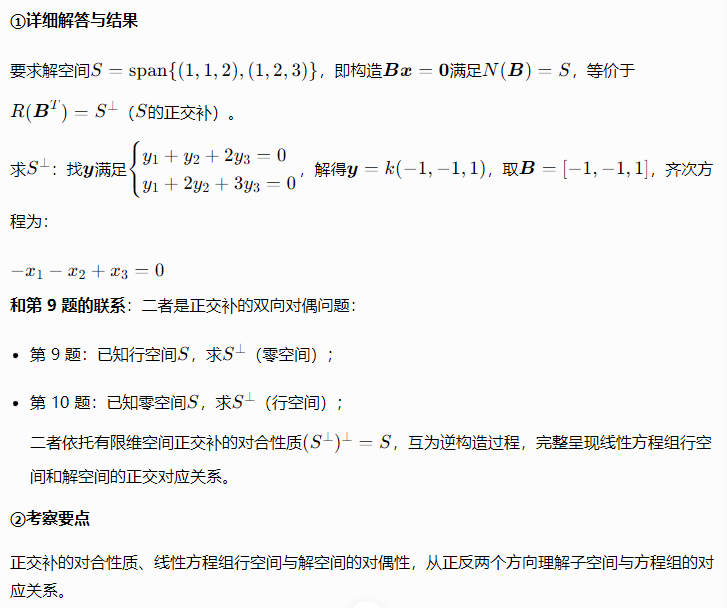
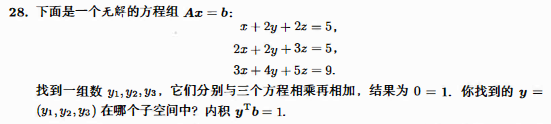
6)线性方程组可解性的正交条件
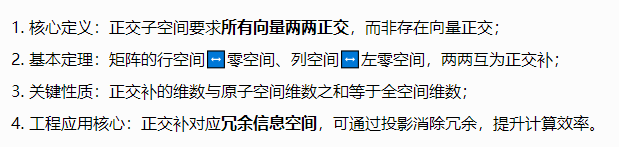
7)总结
e)矩阵和子空间
1)本小节背景:本节是正交子空间与线性代数基本定理的深化,理清了正交子空间与正交补的本质区别,揭示了矩阵乘法的真正数学作用,并引出不可逆矩阵的替代-伪逆矩阵。本内容是投影理论、最小二乘、寄异值分解的前置知识,同时也是FPGA设计网络中权重稀疏化、前向传播加速、反向传播伪逆计算的核心数学依据。
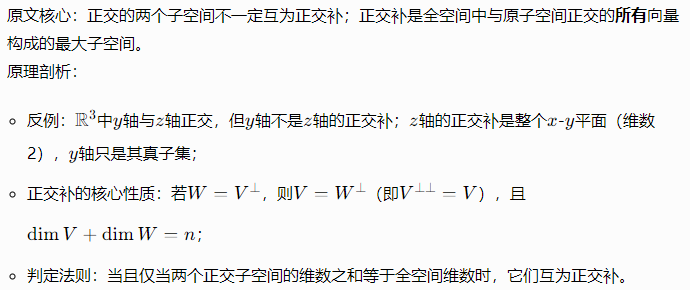
2)正交子空间和正交补的本质区别
3)空间的正交分解定理
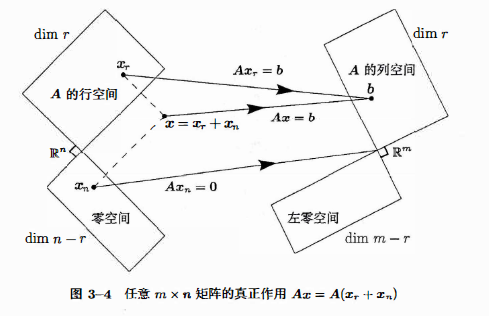
4)矩阵乘法的本质
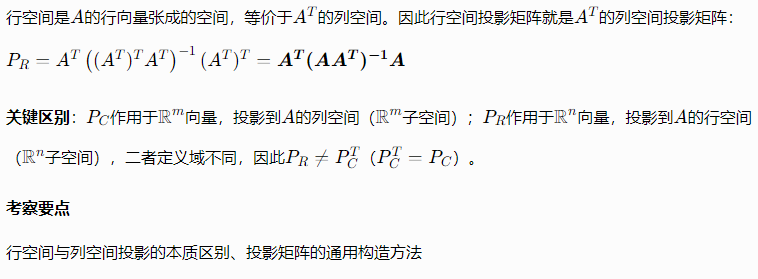
5)行空间到列空间的可逆性

6)转置与伪逆矩阵
7)总结
f)习题补充
1)

2)

3)

4)

5)
6)

7)

8)
9)

10)
夹角余弦和直线上的投影
a)本节背景:本节是欧式内积空间从正交性判定到正交投影应用的关键节点。之前我们讨论了用内积刻画向量夹角、判定正交性,也讨论了正交矩阵的旋转变换性质。本节是利用正交约束解决欧式空间最优逼近问题,即给定向量b与子空间S,求解S中离b距离最近的点(正交投影点)。这直接推导出最小二乘法,是测绘数据拟合、神经网络特征处理的底层数学基础。
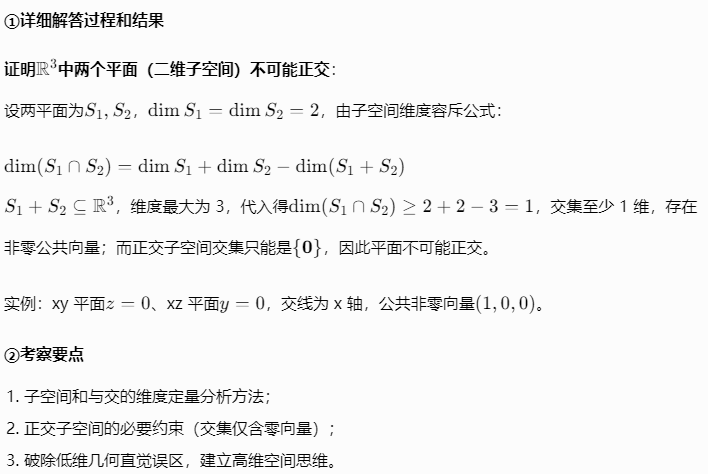
b)内积与夹角余弦
1)本小节背景:内积是线性代数中连接代数运算与几何直观的核心桥梁。在低维空间中,我们可以通过几何观察直接得到向量的夹角,但在高维空间中,不存在直观的几何夹角,必须通过代数定义的内积来量化两个向量的方向相似性。本节从二维的几何直观出发,推导出n维空间通用的夹角余弦公式,为后续正交投影、最小二乘、特征分解等核心内容打基础。
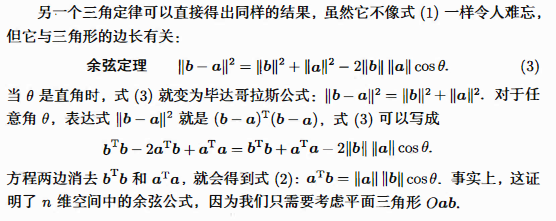
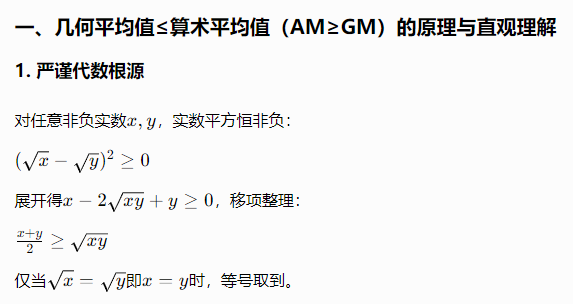
2)二维情形的三角函数推导
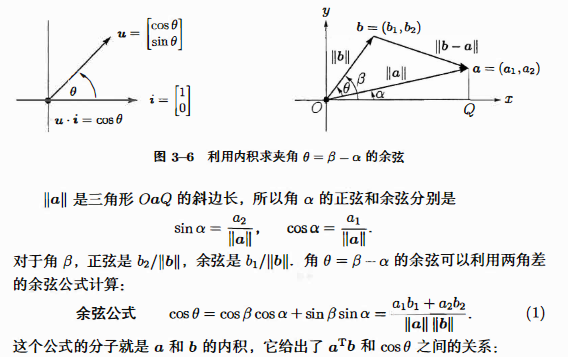

3)余弦定理代数推导
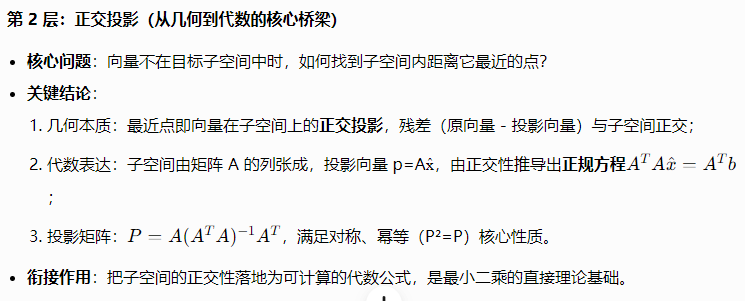
c)直线上的投影
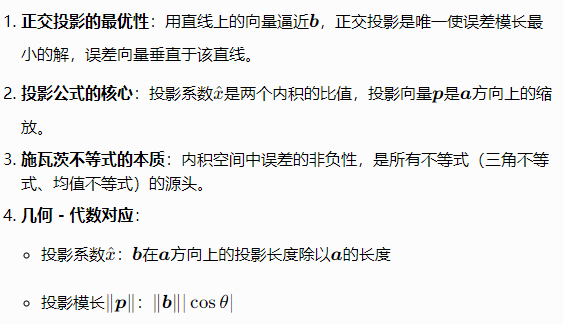
1)本小节背景:本节是内积的第一个核心应用,解决线性代数中最基础的最优近似问题。用给定直线上的向量p去逼近任意向量b,如何让误差最小?这个问题是最小二乘法、正交分解、降维算法的基础。在高维空间中,无法直观判断最近点,但正交投影给出了唯一且通用的代数解法。
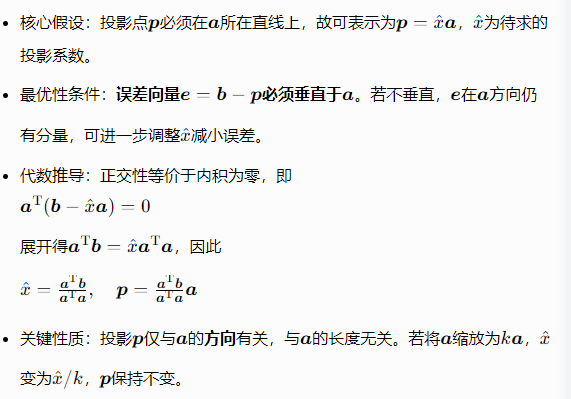
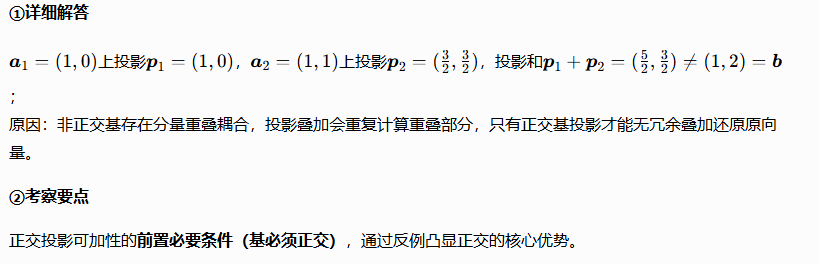
2)投影的几何约束与公式推导
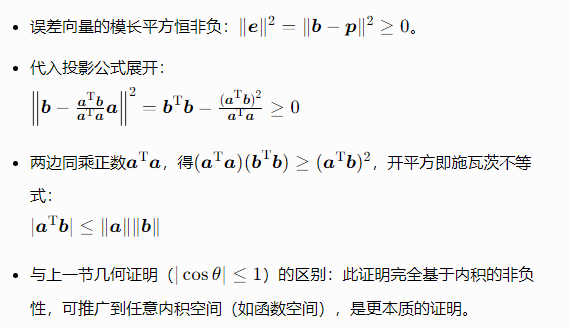
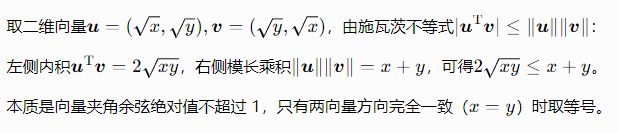
3)施瓦茨不等式本质证明
4)总结
d)秩为1的投影矩阵
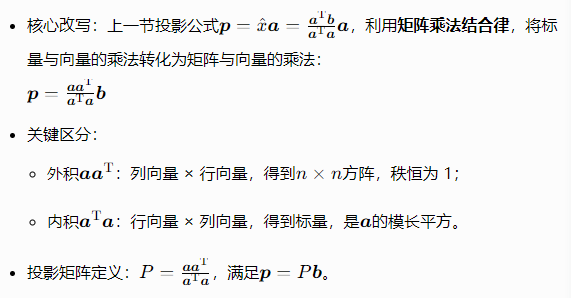
1)本小节背景:上面我们得到了向量在直线上投影的向量表达式,但线性代数的核心是线性变换的矩阵表示。将投影到某条直线这个线性操作封装为一个矩阵P,使得对任意向量b的投影都能统一写成p=Pb。这是单个向量运算到批量线性变换的飞跃。将几何直观转换为代数运算,为后续子空间投影、最小二乘法、PCA降维提供了矩阵框架。
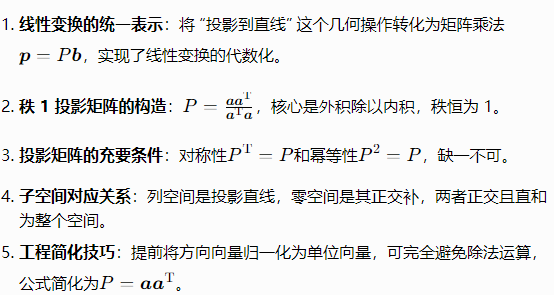
2)从向量投影到矩阵投影
3)投影矩阵的两个核心性质(充要条件)
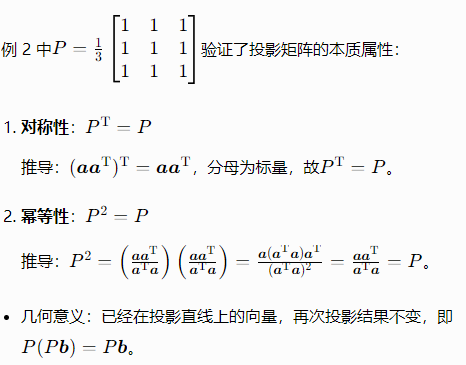
4)投影矩阵的子空间结构
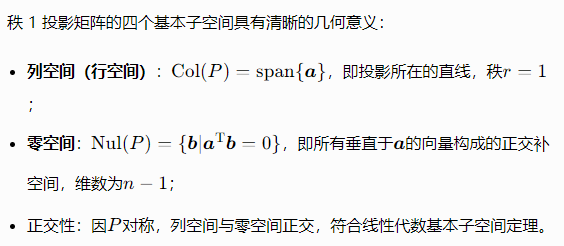
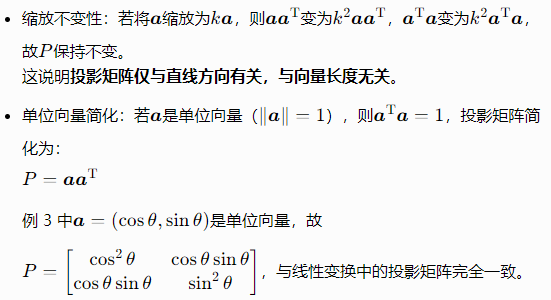
5)缩放不变性与单位向量简化
6)总结
e)内积的转置
1)本小节背景:之前我们对转置的理解停留在元素层面的操作定义,但这并没有揭示其本质。本小节通过内积给出转置的抽象代数定义,将转置与线性变换的伴随算子联系起来。这一定义是转置更本质的刻画。是后续正交矩阵、最小二乘法、神经网络反向传播等核心内容的数学基础。
2)转置的表层定义
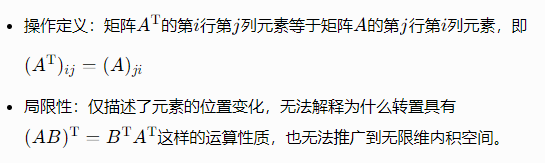
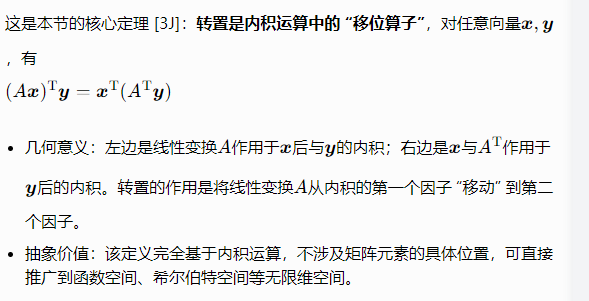
3)转置的本质定义(内积伴随)
4)转置和逆
f)补充
1)

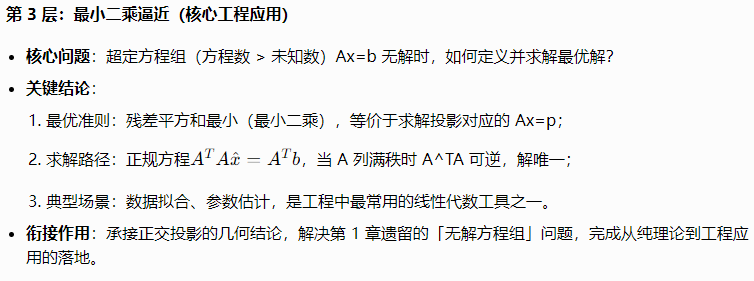
投影与最小二乘法
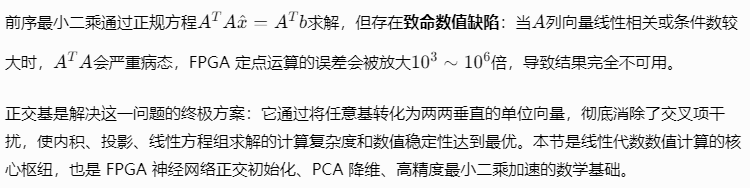
a)本节背景:传统高斯消元求解Ax=b的前提是b落在矩阵A的列空间C(A)内,仅当方程数量≤未知数、观测无噪声时大概率能满足该条件。但实际场景中存在大量超定方程组(观测方程数m远大于待求参数数n),测量噪声会让b偏离C(A),系统不相容无精确解。最小二乘法跳出求精确解的框架,寻找使整体偏差最小的近似解,是数据拟合、机器学习参数求解的基础方法。
b)
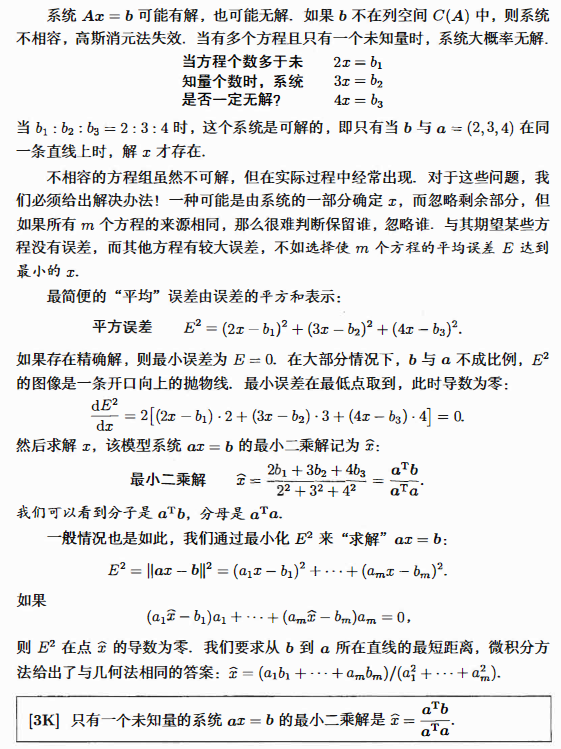
c)多变量的最小二乘问题
1)本小节背景:单变量最小二乘是将向量投影到1维直线,而工程中绝大多数问题是多参数拟合。
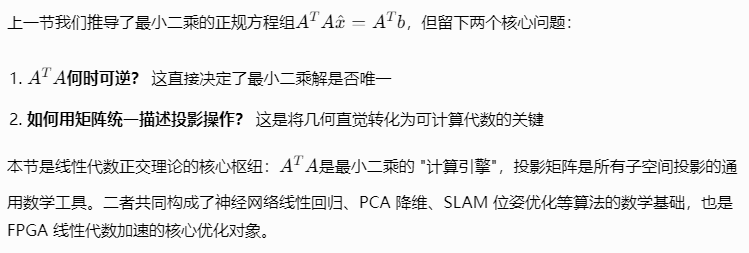
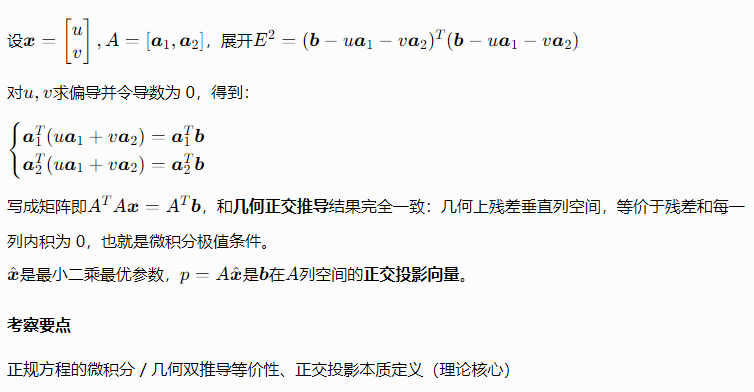
2)核心本质:正交投影
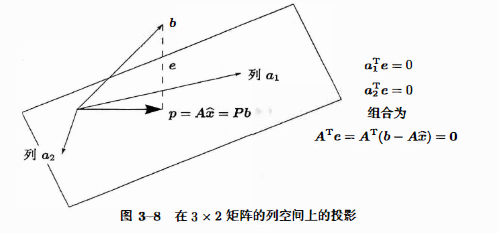
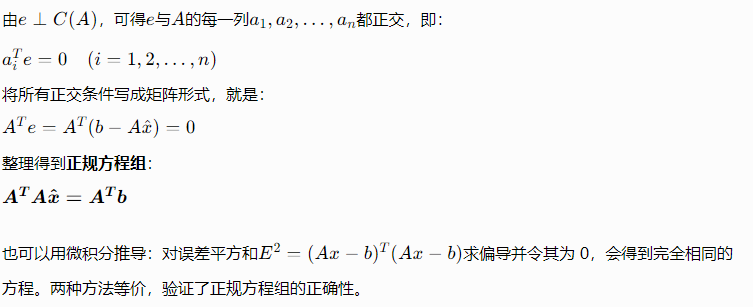
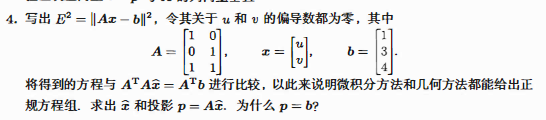
3)正规方程组推导
4)
5)投影矩阵与投影运算
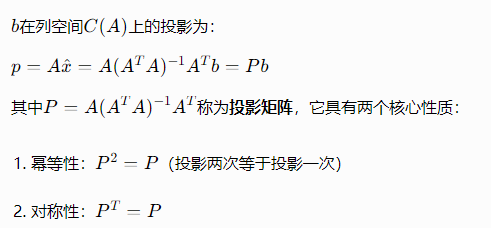
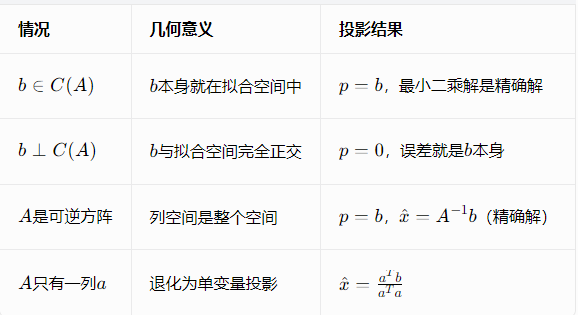
6)四个核心结论
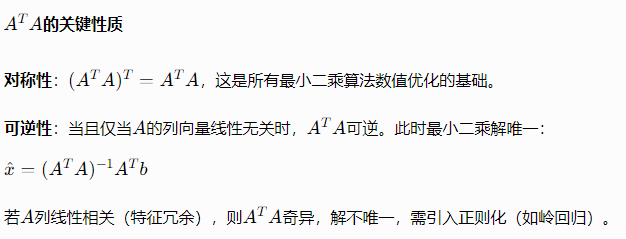
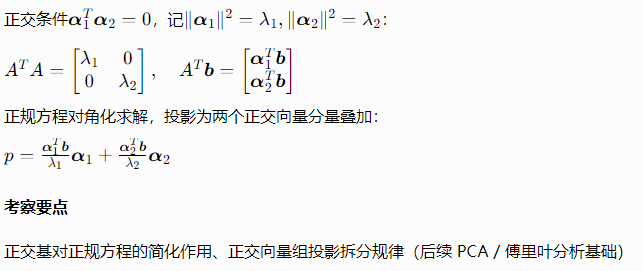
d)向量积矩阵和投影矩阵
1)本小节背景
2)向量积矩阵
①
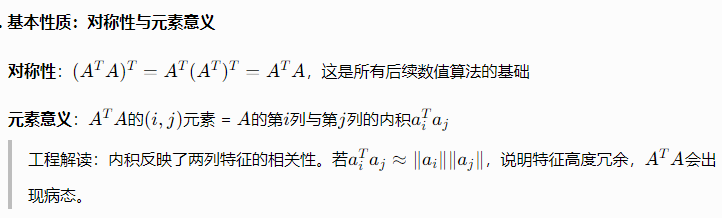
②
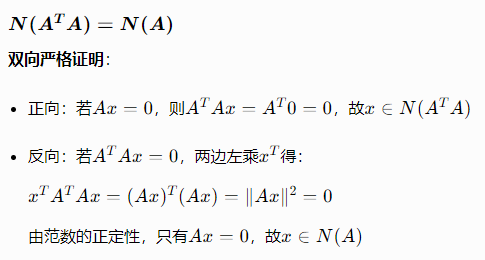
③

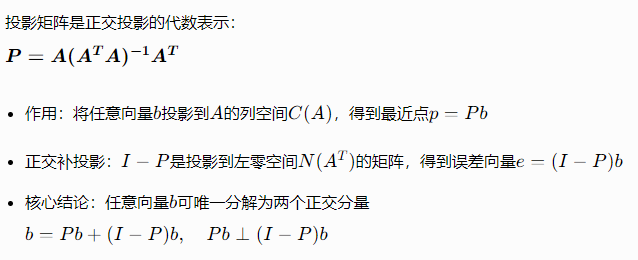
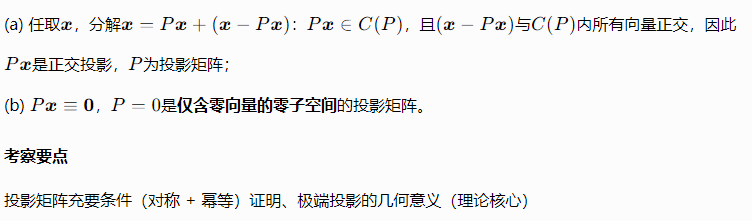
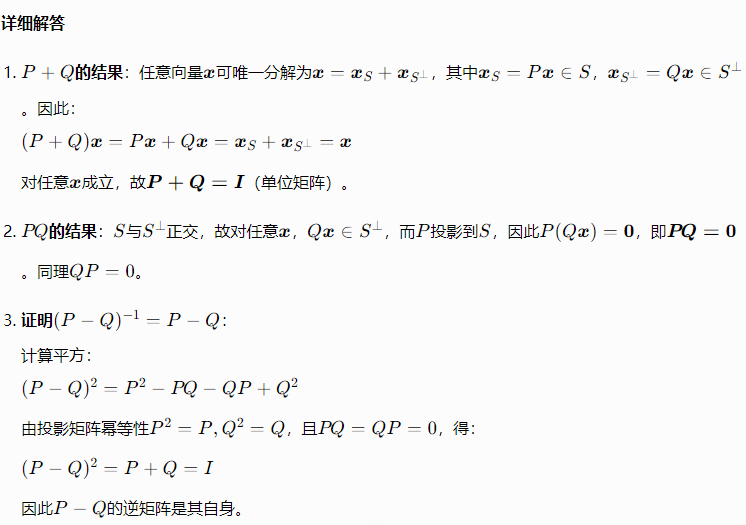
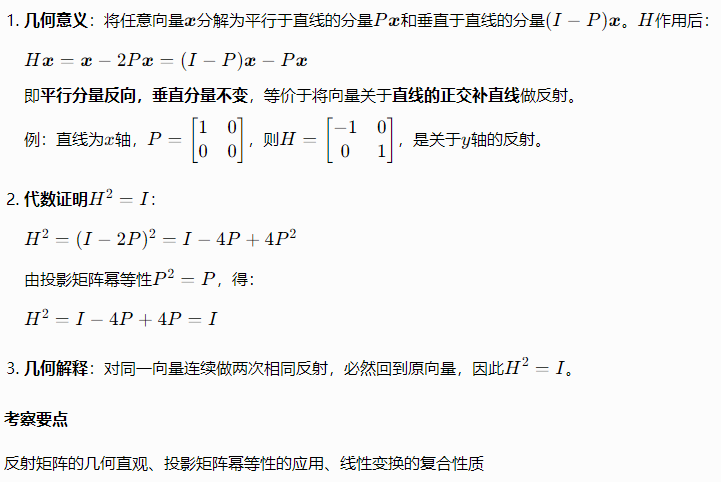
3)投影矩阵
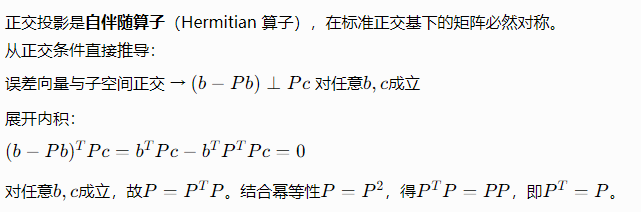
①定义与几何意义
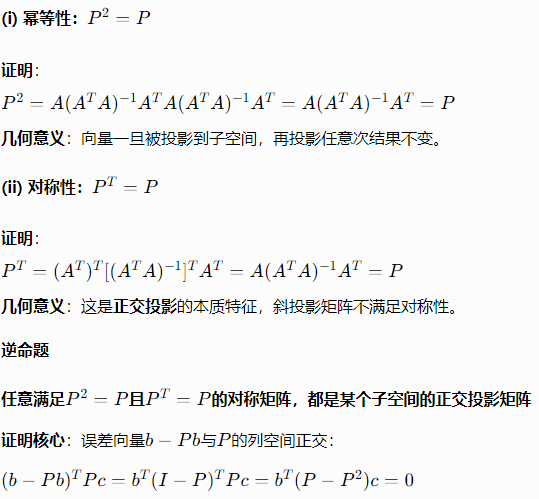
②两个基本性质(投影矩阵的身份证)
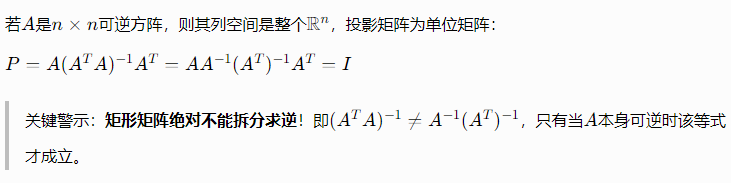
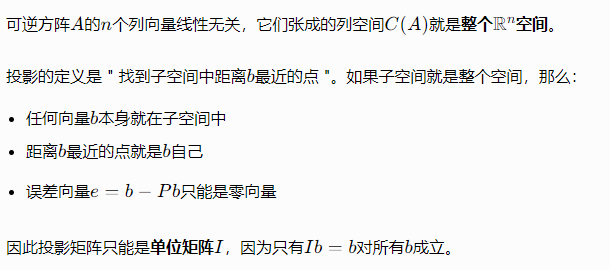
③可逆方阵投影
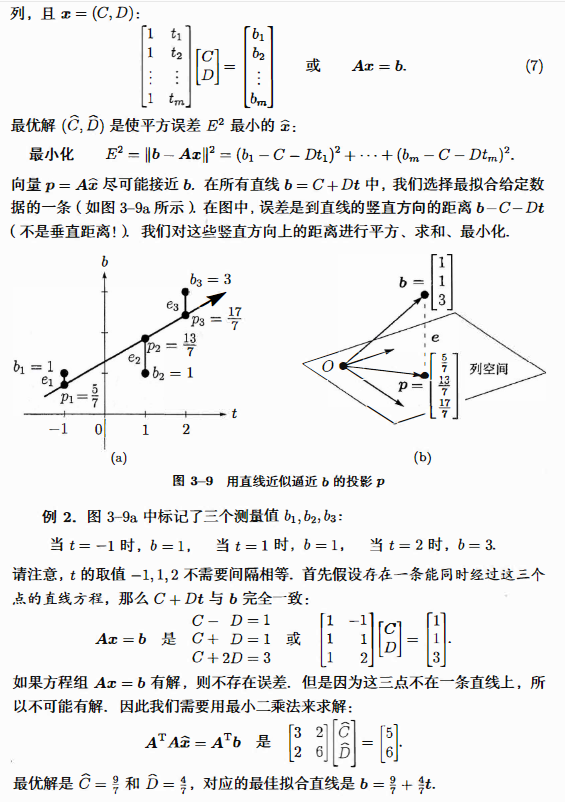
e)数据的最小二乘拟合
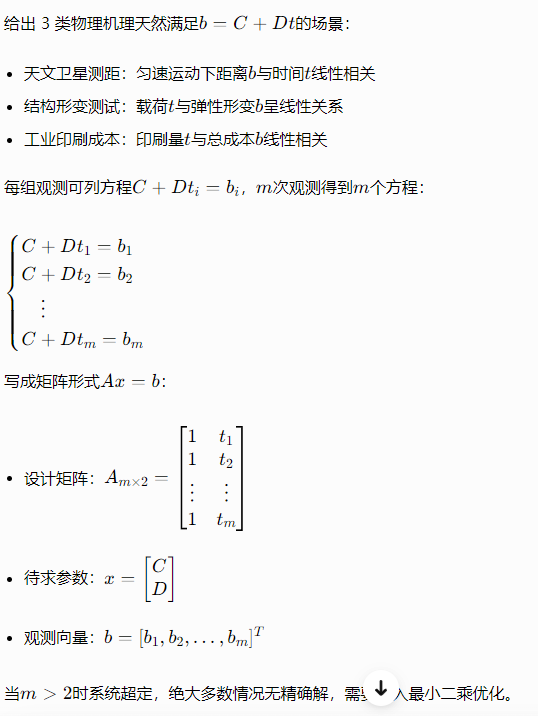
1)本小节背景:工业场景经常出现单自变量线性观测任务,自变量t可精准测量且无明显噪声,因变量b受测量干扰,会采集m组(ti,bi)数据,形成超定方程组,传统高斯消元无精确解。最小二乘直线拟合通过最小化因变量方向的残差平方和,得到最优直线b=C+Dt,是一元线性回归的基础形式,也可扩展适配可线性化的非线性模型。
2)线性建模与超定方程组构建
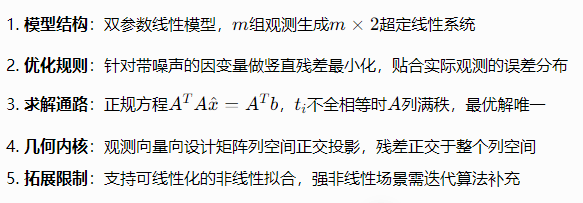
3)优化准则、矩阵求解、几何本质
4)通用正规方程与模型拓展

5)方法适用边界

6)总结
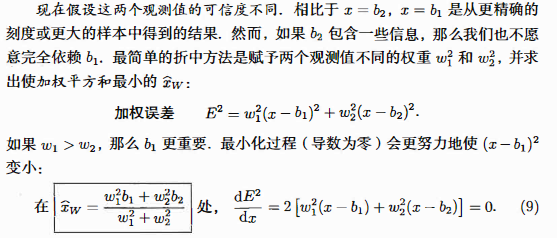
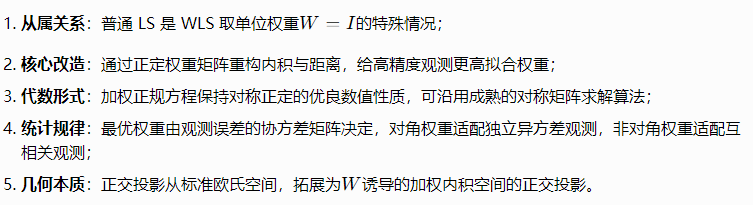
f)加权最小二乘法
1)本小节背景:普通最小二乘法默认所有观测测量精度一致,对残差赋予均等权重。实际工程中不同观测可信度存在差异,高精度传感器数据应该占有更高话语权、噪声波动大的观测需降低权重。观测还可能存在互相关性,此时普通最小二乘结果会出现偏差、方差偏大的问题。加权最小二乘通过权重矩阵量化观测可靠性,改造误差度量与投影规则,得到统计更优的拟合结果,是广义最小二乘的理论基础。
2)普通最小二乘基准
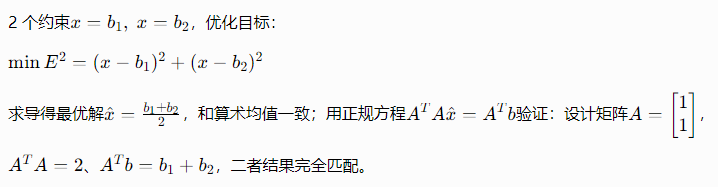
3)引入加权优化
3)推广到一般的超定系统

4)权重的统计学最优取值

5)方法边界

6)总结
g)补充
1)
2)

3)

4)

5)

6)

正交基与格拉姆-施密特正交化
a)本节背景
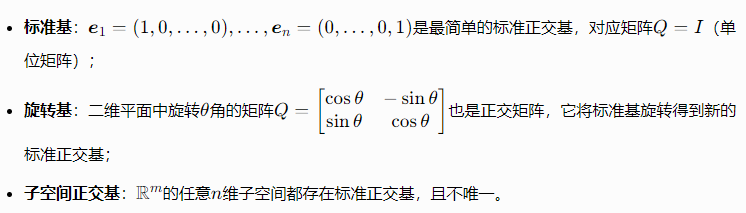
1)正交基和标准正交基的定义
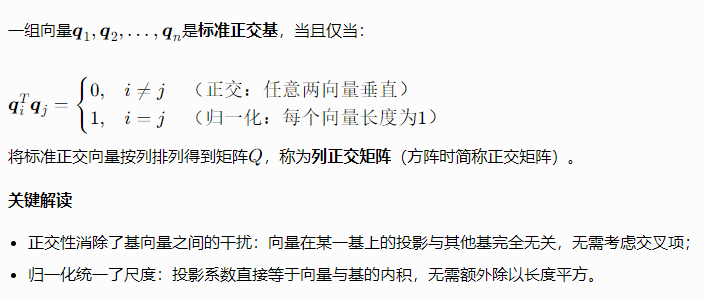
2)标准正交基的例子与存在性
b)正交矩阵
1)本小节背景
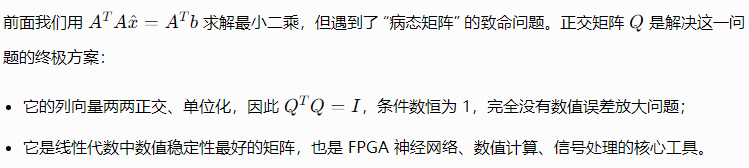
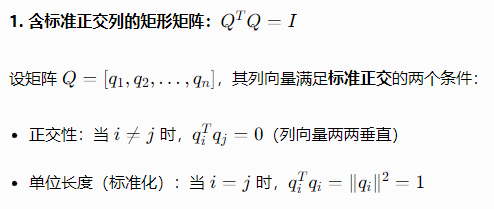
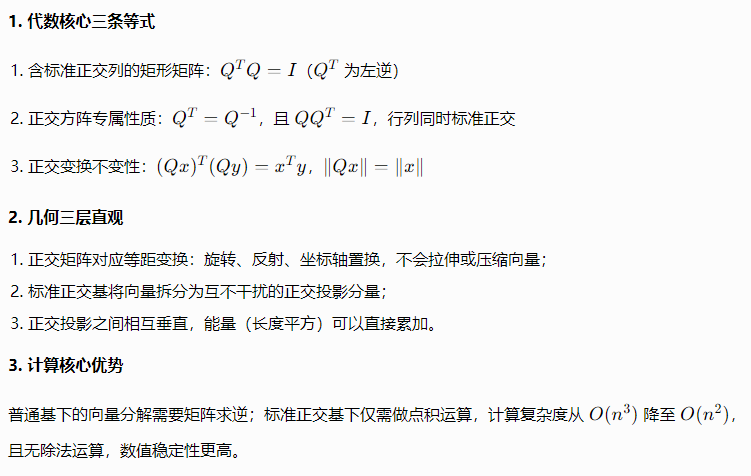
2)标准正交列与正交矩阵定义

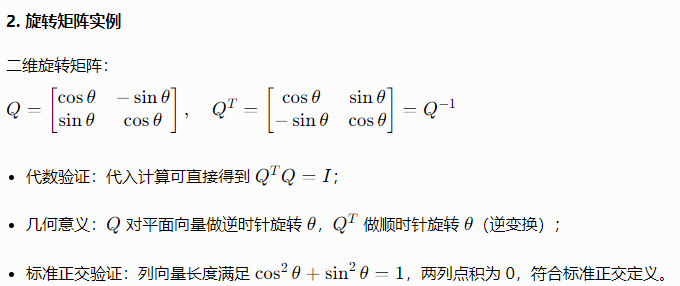
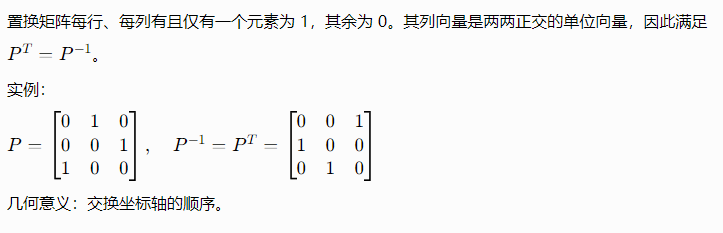
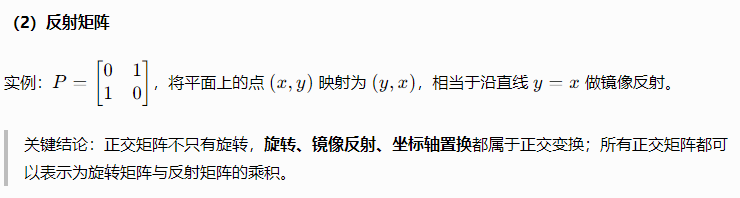
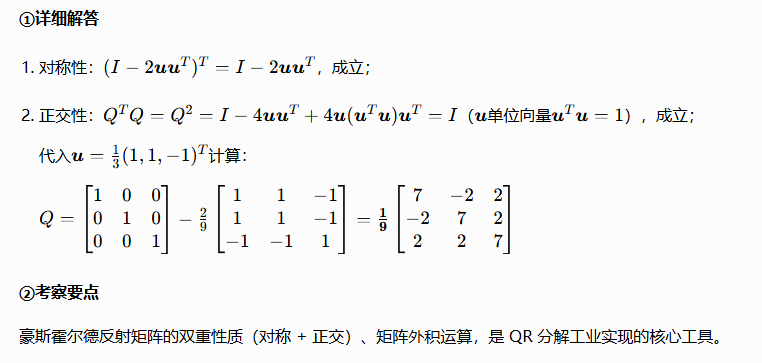
3)两类典型正交方阵
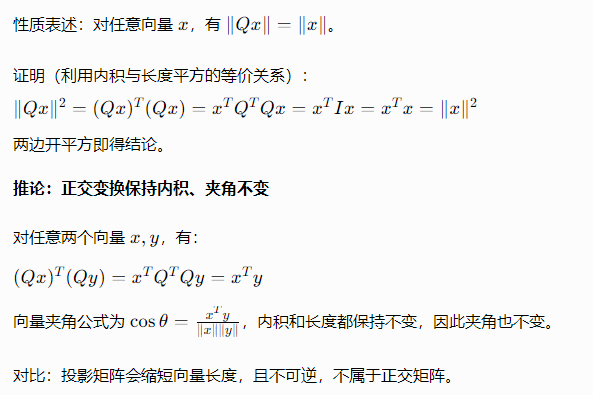
4)正交矩阵核心性质:正交变换保持向量长度不变
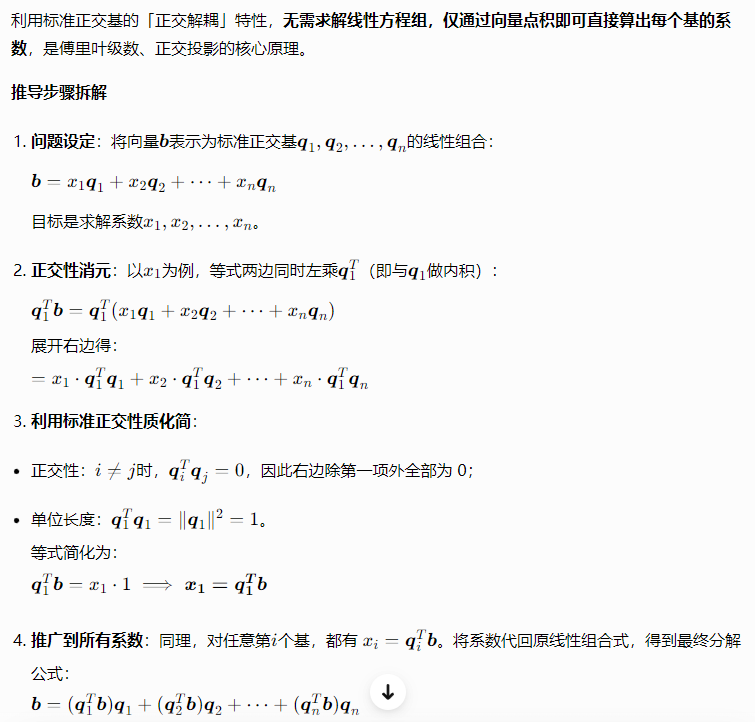
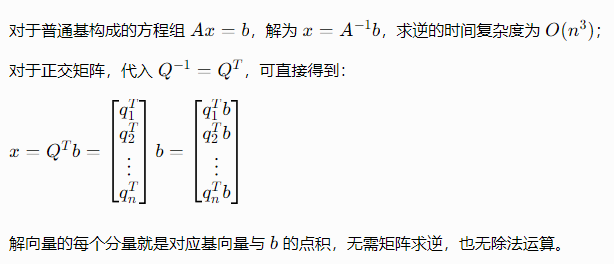
5)标准正交基下的向量分解公式
6)线性方程组Qx=b求解
7)正交投影的毕达哥拉斯公式

8)重要推论:方阵列正交等价于行标准正交
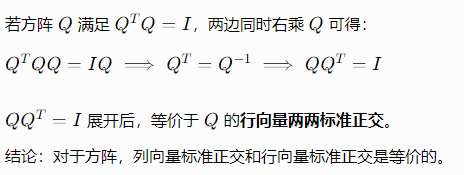
9)总结
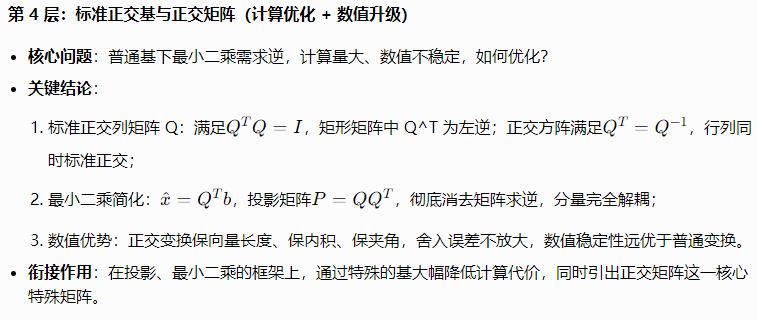
c)具有标准正交列的矩形矩阵
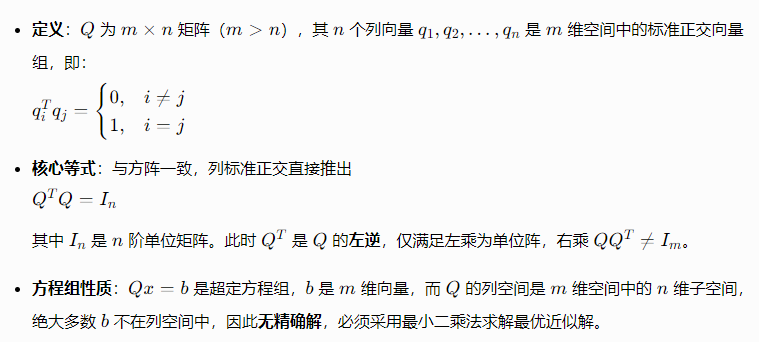
1)本小节背景:上面讨论了正交方阵(m=n),但工程中超定线性方程组(m>n)更普遍,如数据拟合、参数估计、信号重建等场景,Ax=b通常不存在精确解,只能寻求最小二乘意义下的最优近似解。
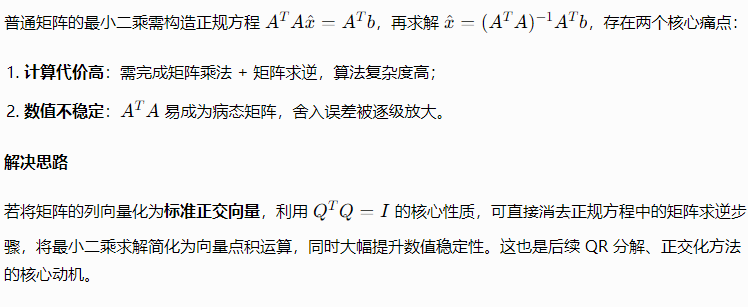
2)矩形标准正交矩阵的定义与左逆性质
3)标准正交列下的最小二乘简化
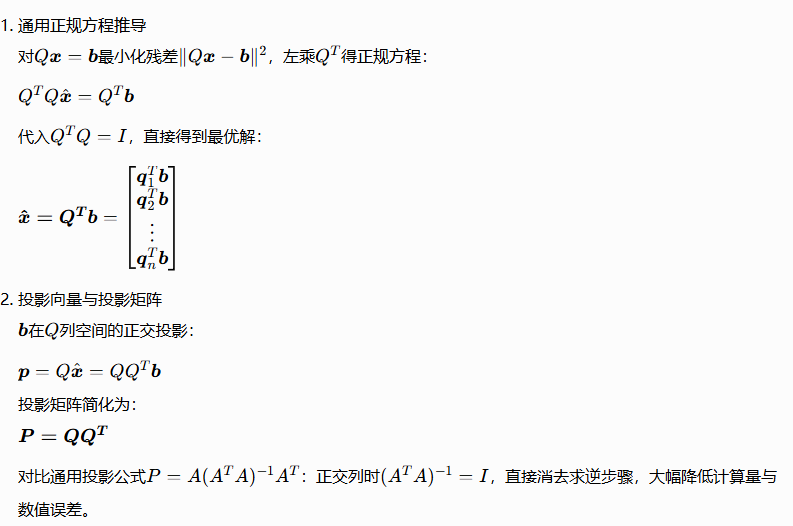
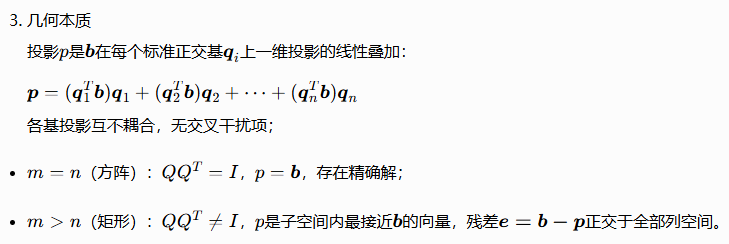
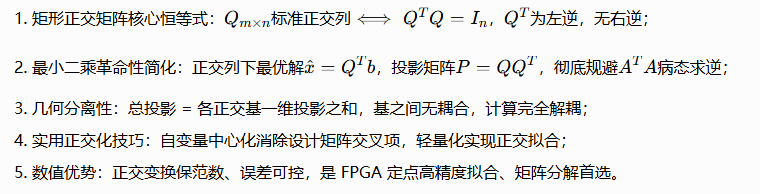
4)总结
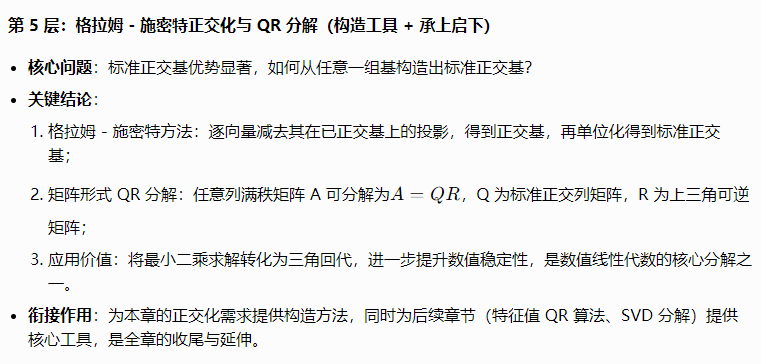
d)格拉姆-施密特正交化过程
1)本小节背景
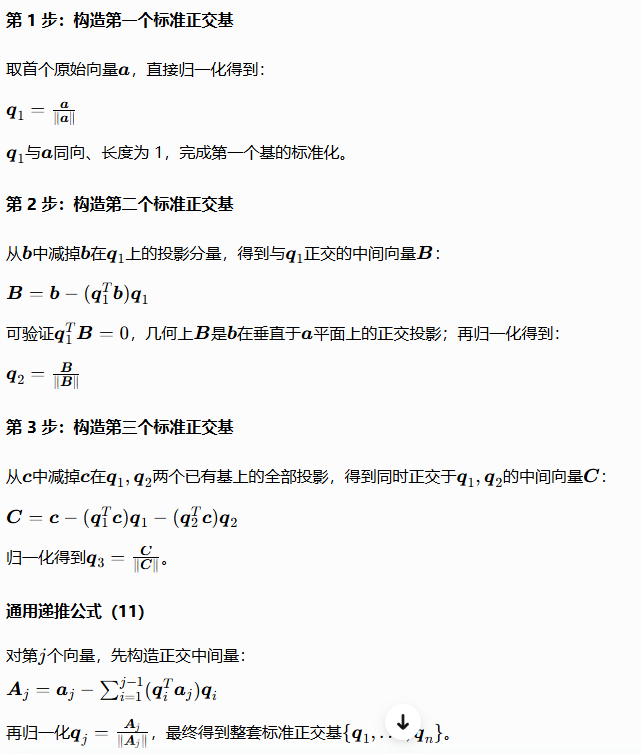
2)

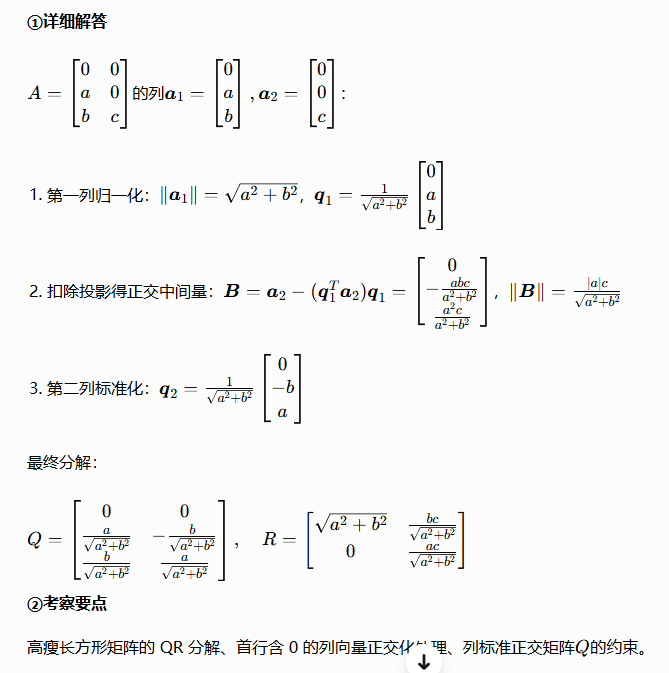
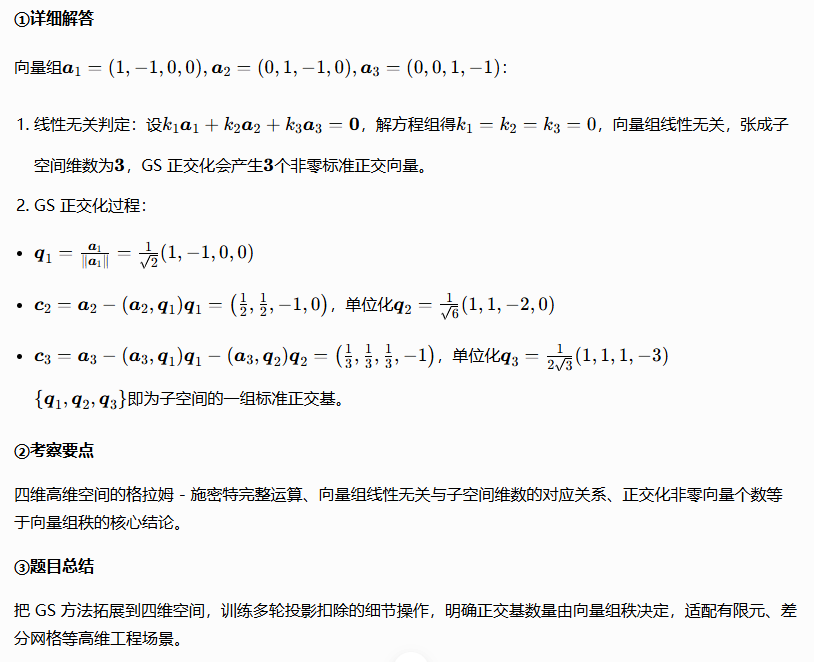
3)经典GS递推
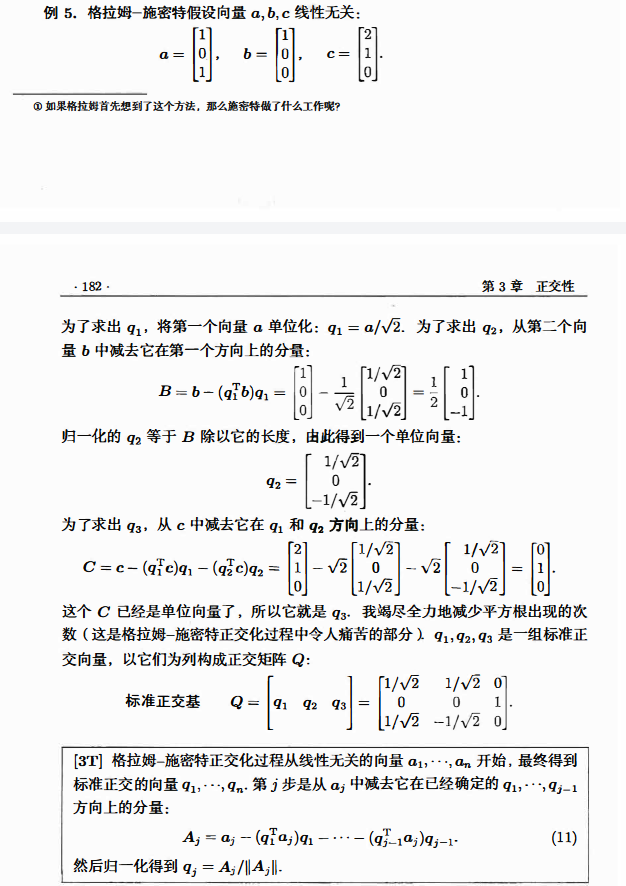
→示例
4)GS优化

5)总结
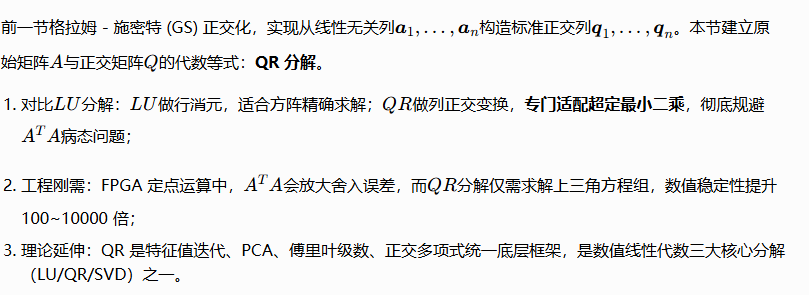
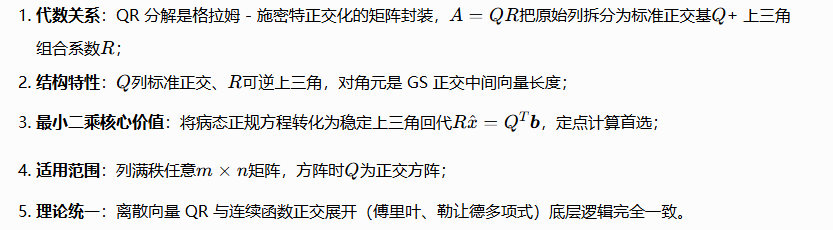
d)QR分解
1)本小节背景
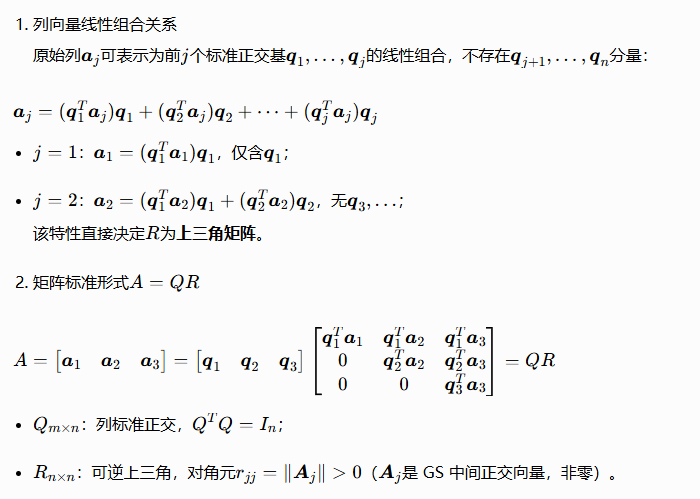
2)QR分解构造逻辑与矩阵形式
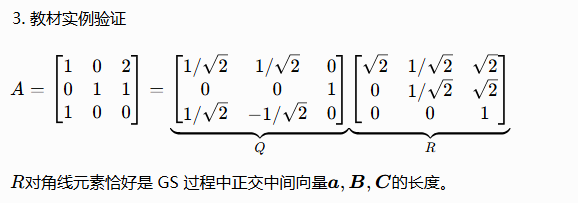
→例子
3)LU分解和QR分解对比

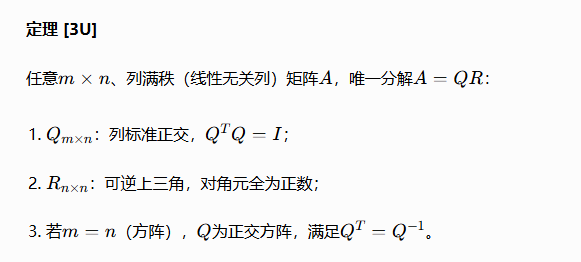
4)核心定义与最小二乘简化推导
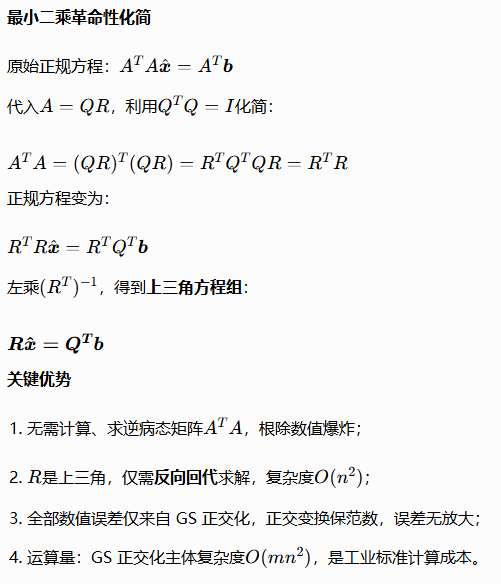
5)正交思想扩展到函数空间
6)总结
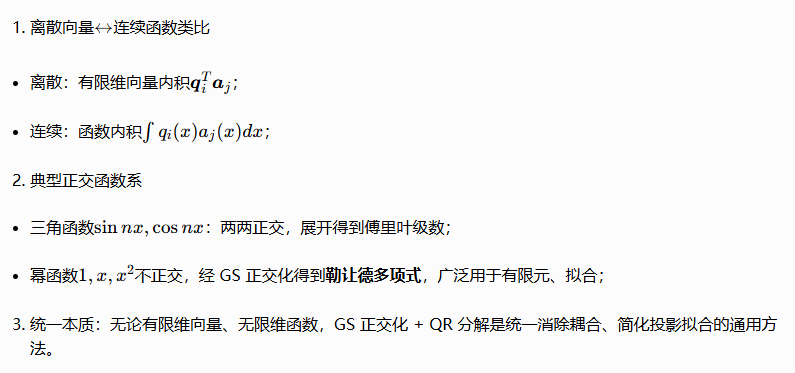
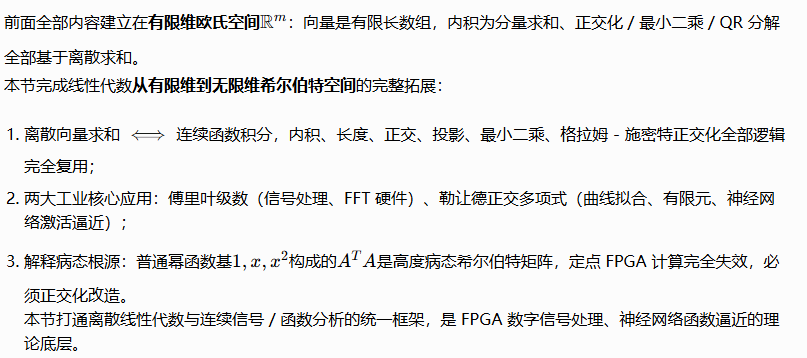
e)函数空间与傅里叶级数
1)本小节背景
2)概述
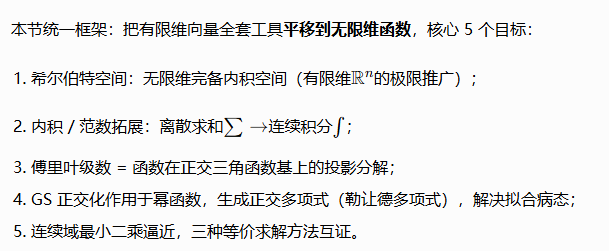
3)希尔伯特空间(无限维序列空间)
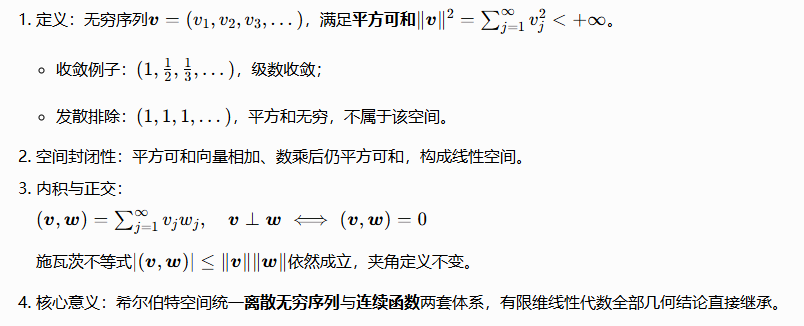
4)函数希尔伯特空间:积分替代求和
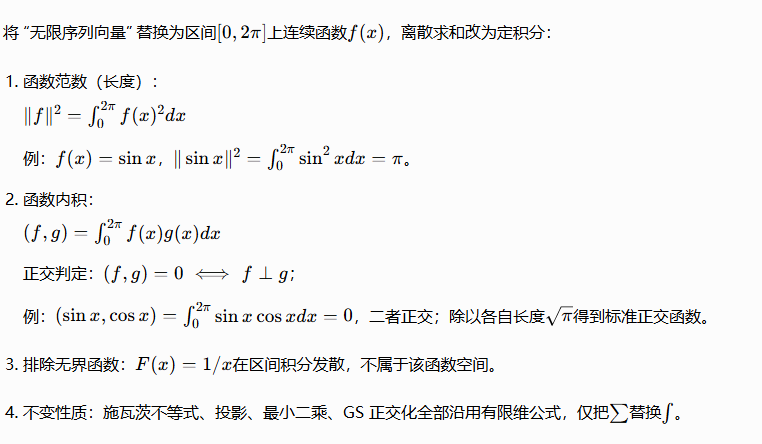
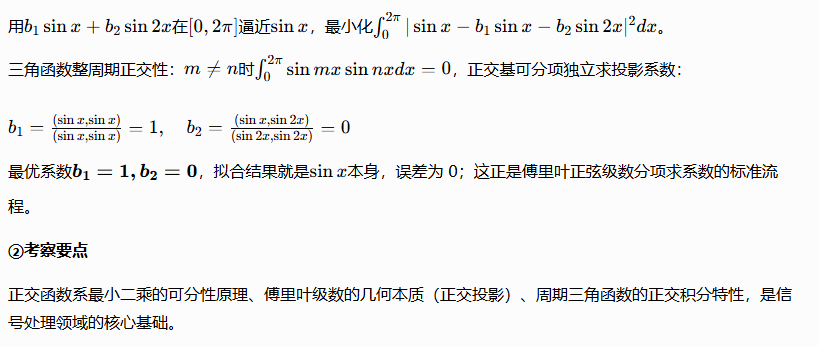
5)傅里叶级数(函数在正交三角函数基上的投影)
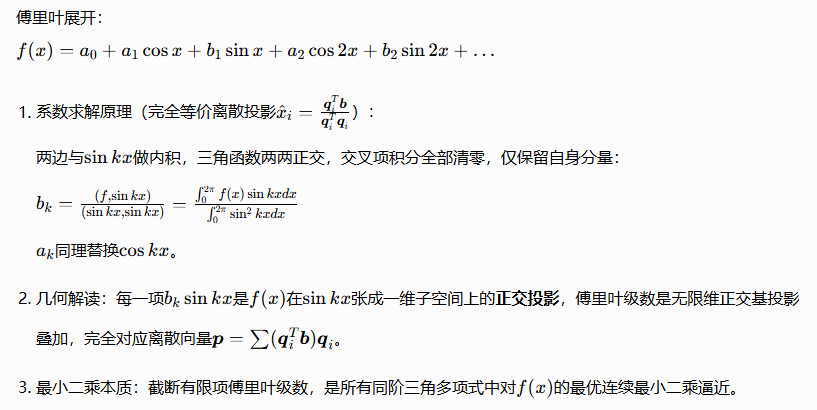
6)幂函数基的病态与格拉姆-施密特正交化(勒让德多项式)
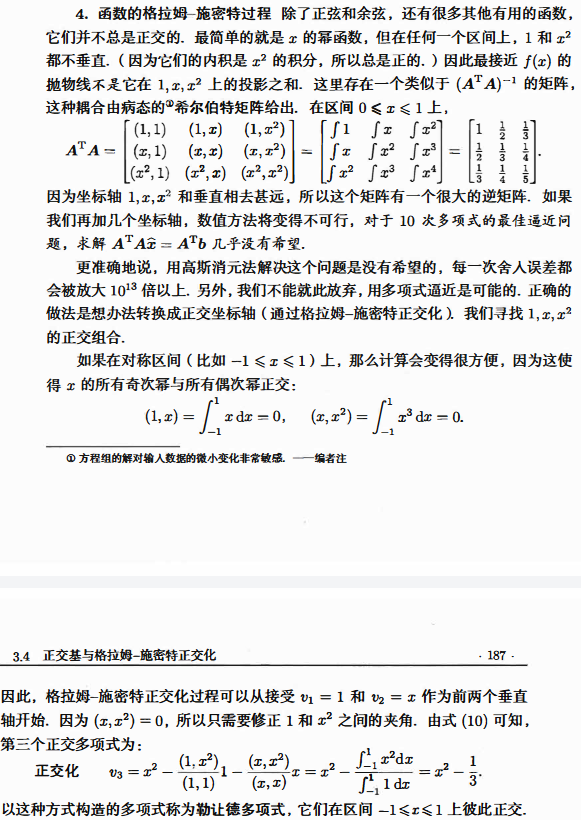
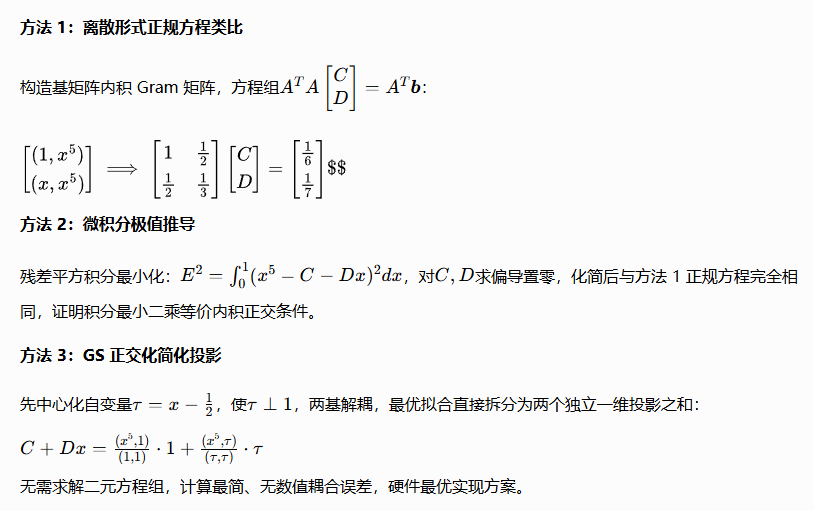
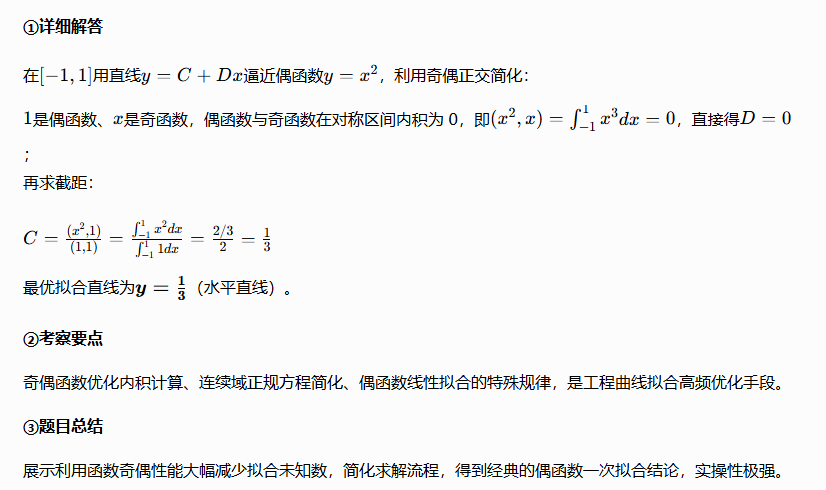
7)连续域最小二乘拟合三种等价方法
f)补充
1)


2)

3)

4)
5)
6)

7)

快速傅里叶变换
a)小地图
b)概述
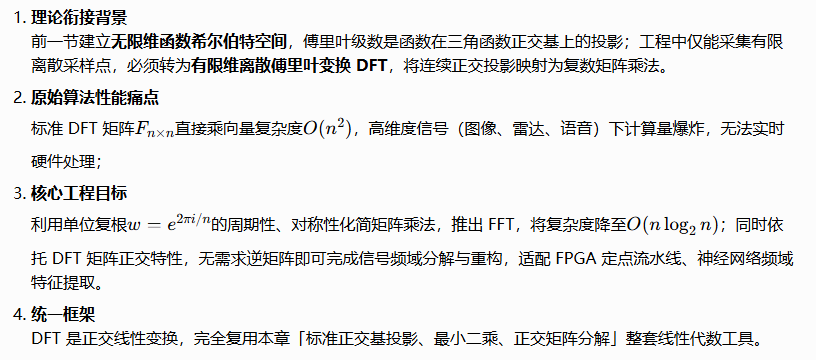
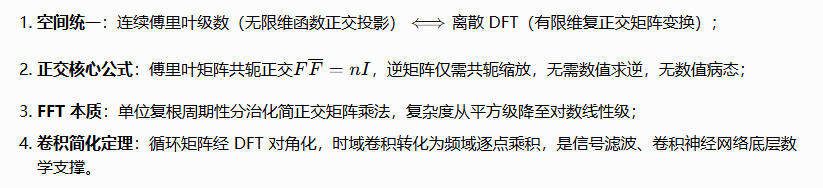
1)傅里叶级数→离散DFT
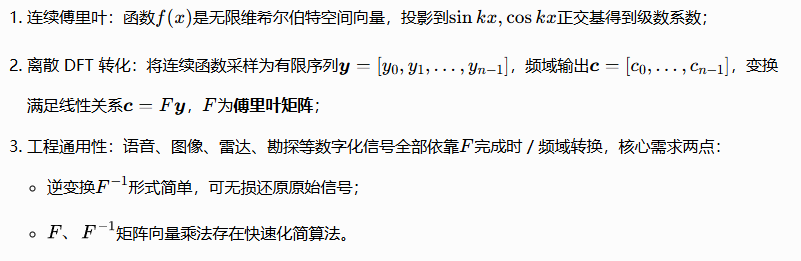
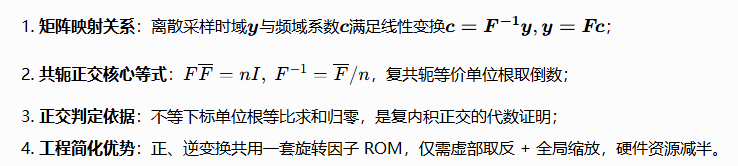
2)傅里叶矩阵F的正交共轭核心性质
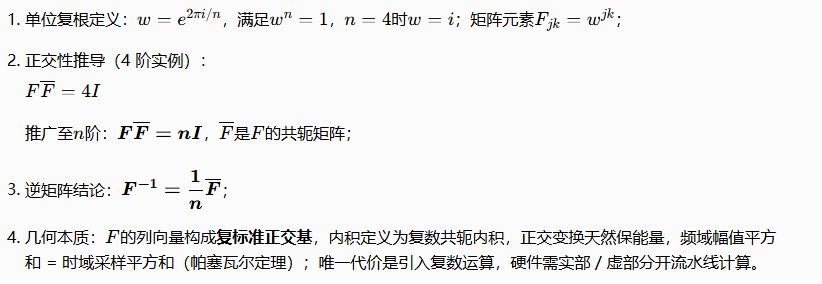
3)FFT复杂度突破与循环矩阵对角化
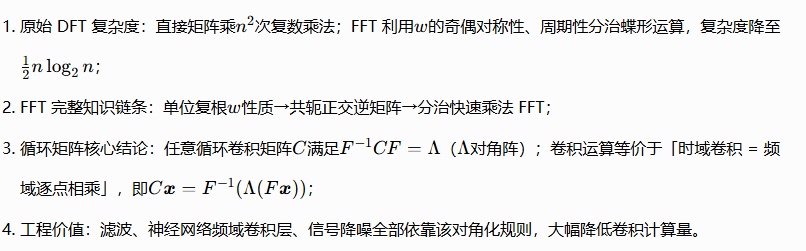
4)总结
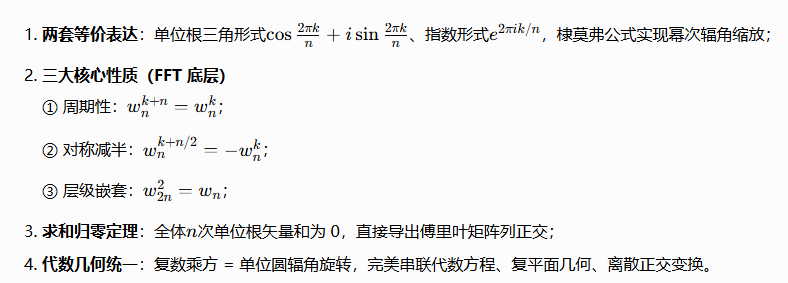
c)复数单位根
1)本小节背景
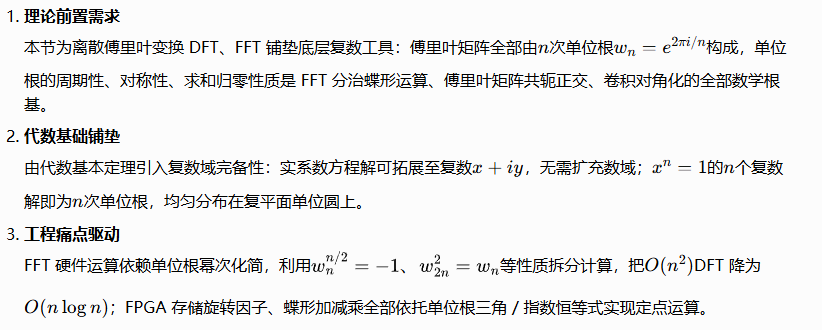
2)代数基本定理与低次单位根实例
3)棣莫弗公式与欧拉公式核心恒等式
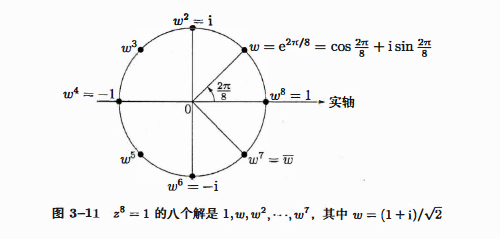
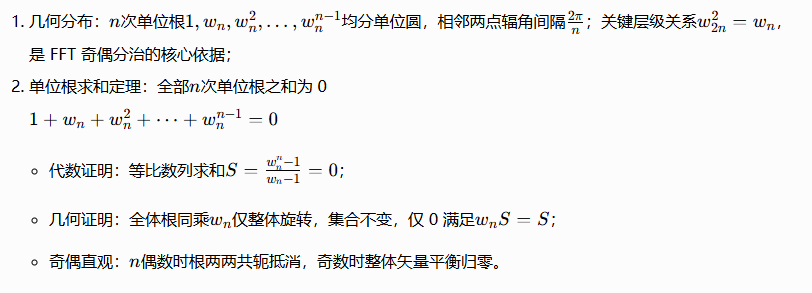
4)单位根几何分布、核心求和性质
5)总结
d)傅里叶矩阵及其逆矩阵
1)本小节背景
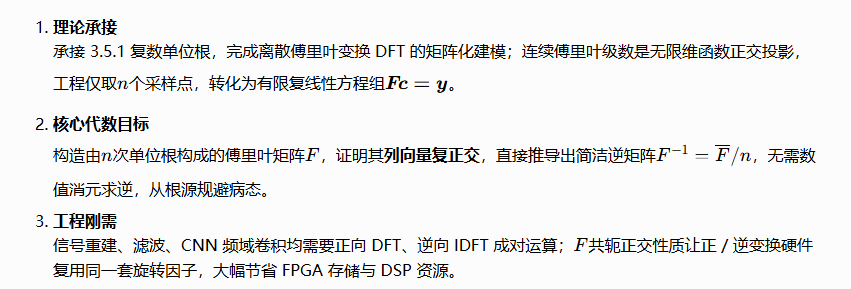
2)离散DFT方程组建模
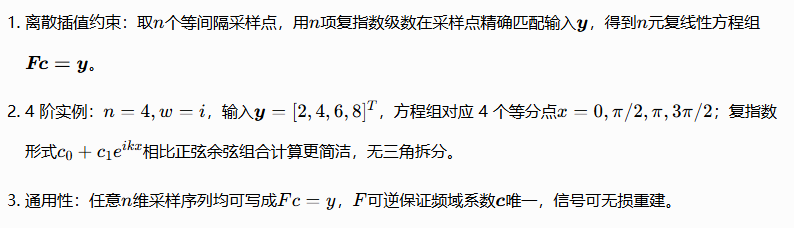
3)傅里叶矩阵标准形式与逆矩阵构造
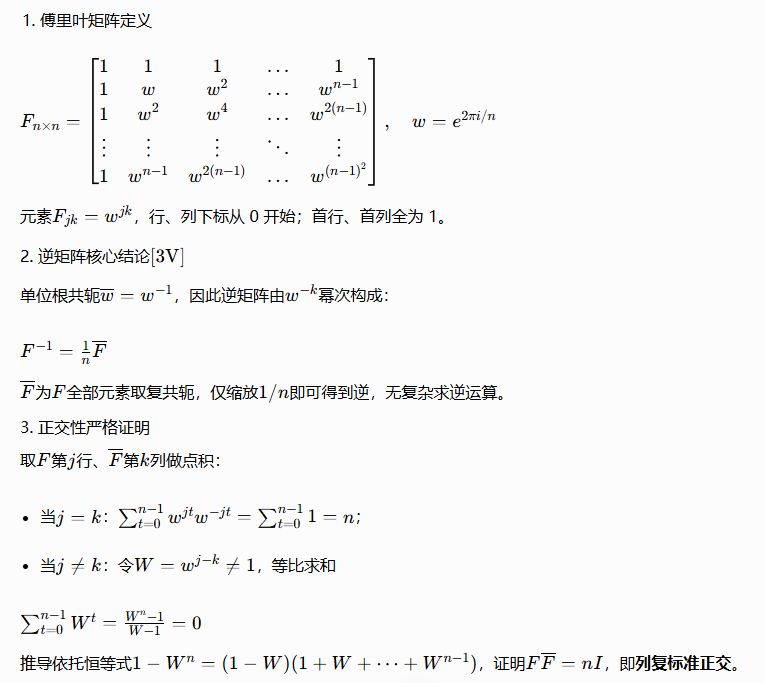

4)总结
e)快速傅里叶变换概述
1)本小节背景
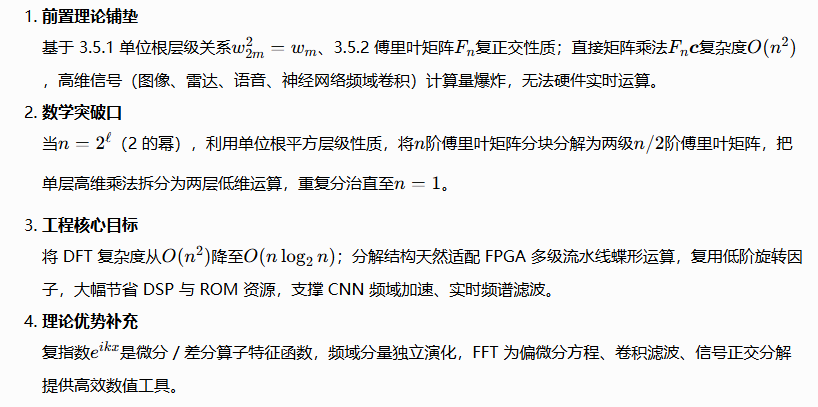
2)单位根层级关系与复杂度对比
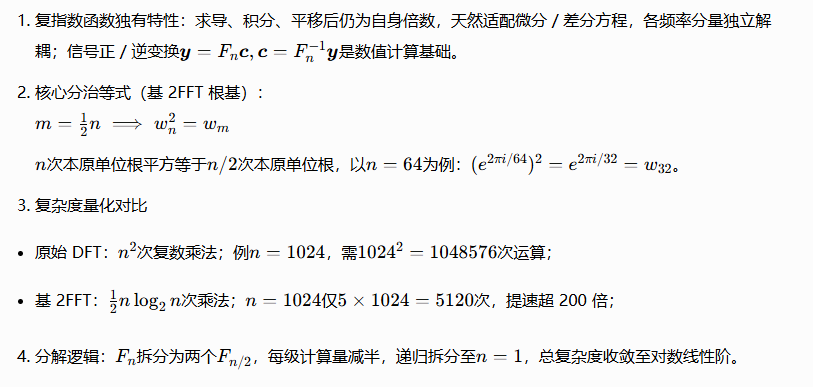
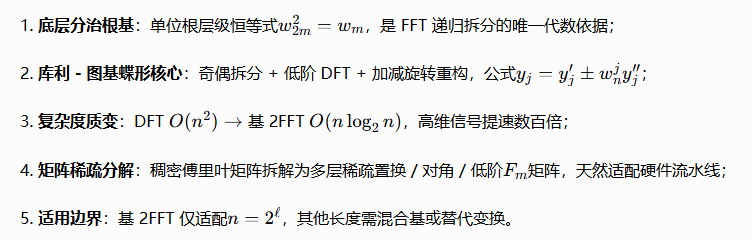
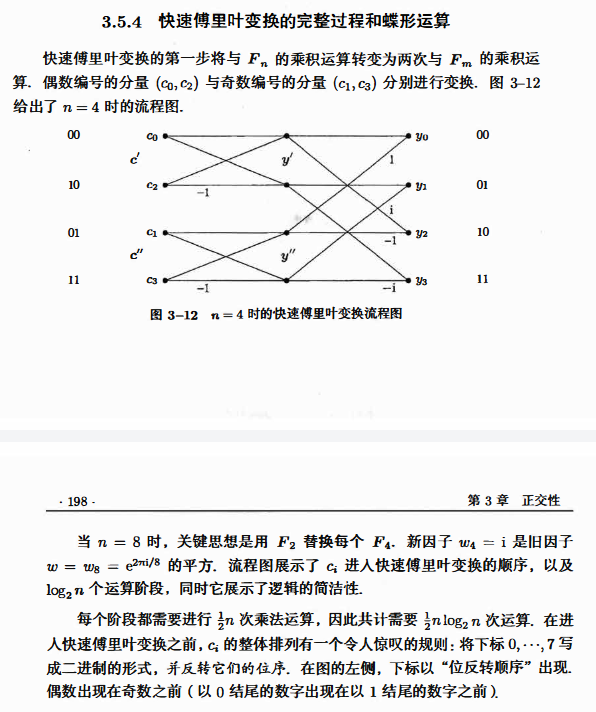
3)基2FFT分治重构公式(库利 - 图基算法核心)
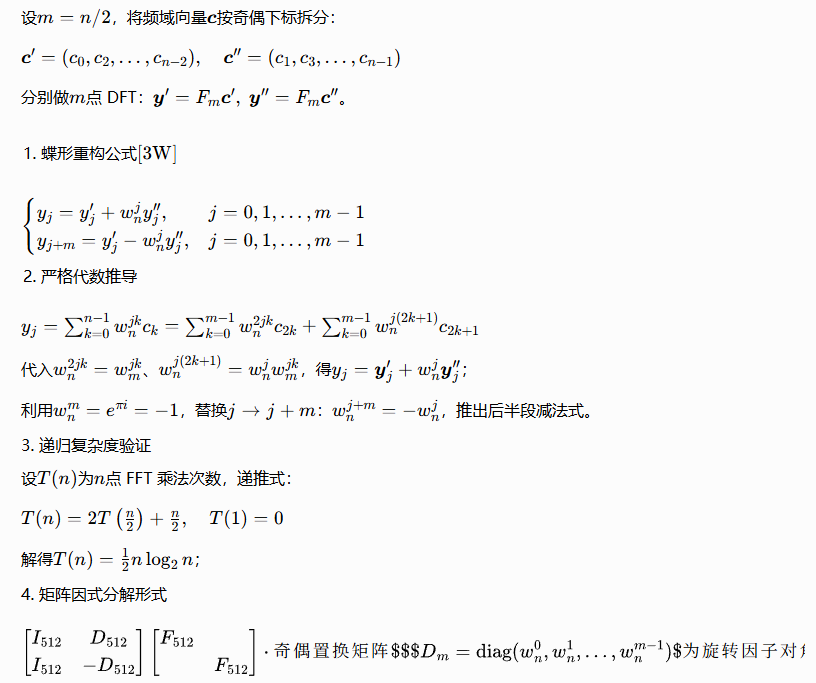
4)4阶实例与傅里叶矩阵完整分解
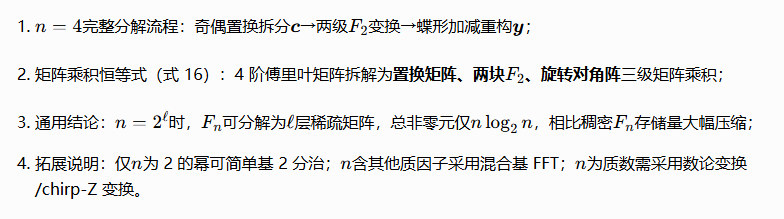
5)总结
e)
神经网络的最优化

神经网络的参数和变量
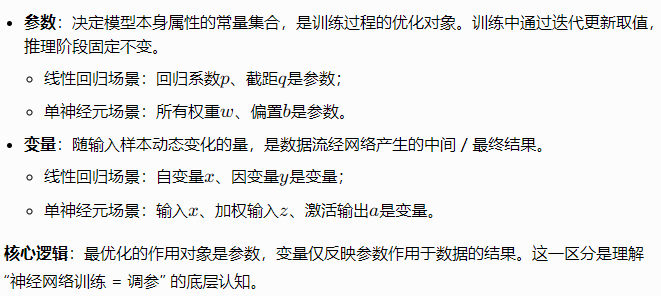
a)参数与变量的定义
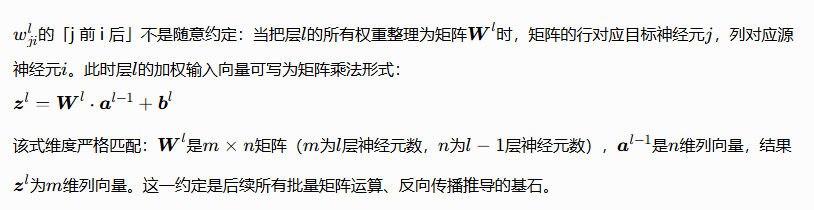
b)标准符号规则
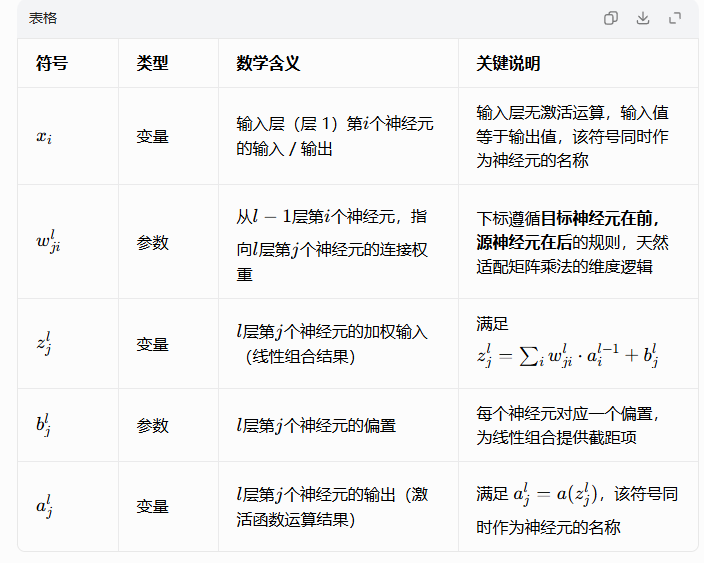
c)变量值的表示方法
1)
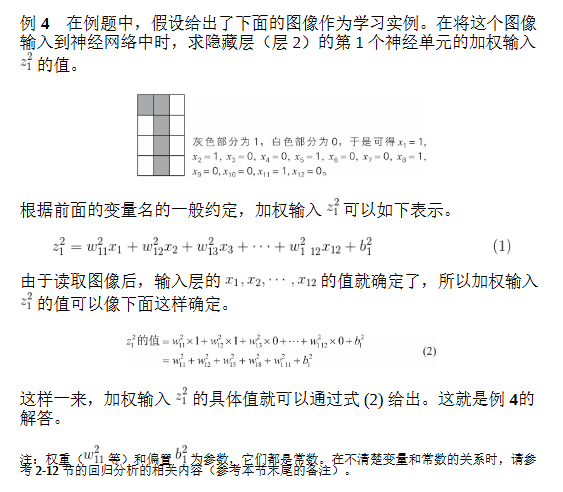
2)
神经网络的变量的关系式
a)小地图
b)输入层的关系式
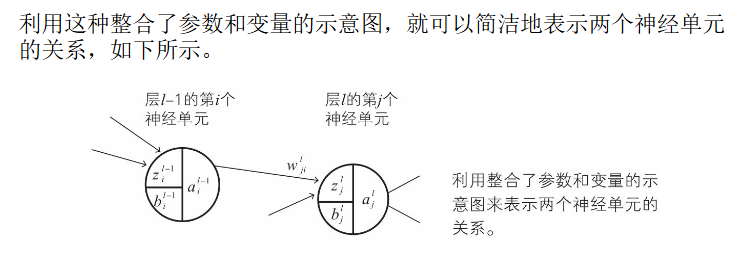
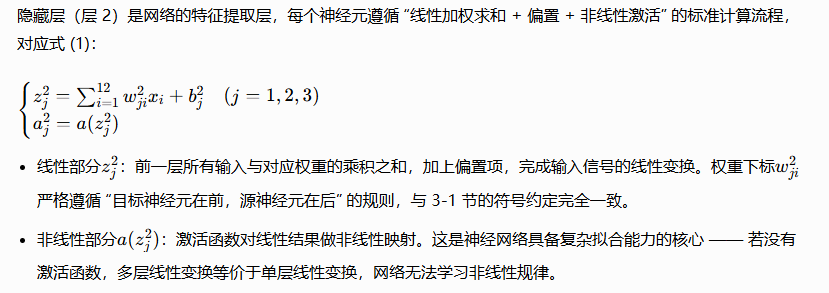
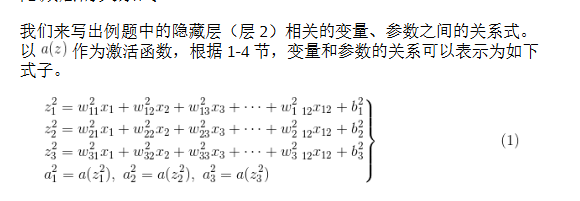
c)隐藏层的关系式
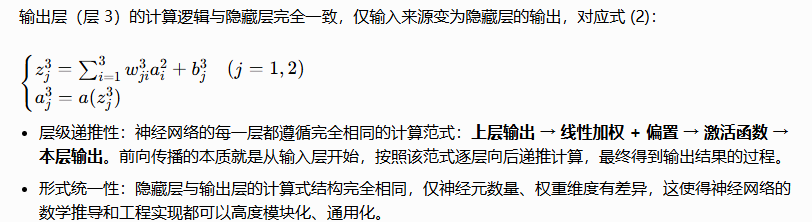
d)输出层的关系式
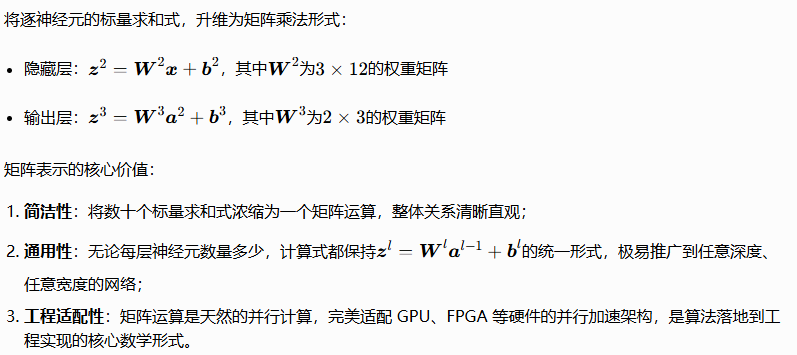
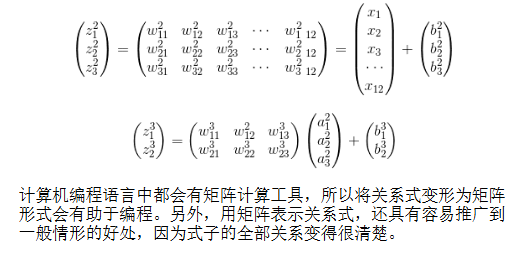
e)矩阵形式表示
学习数据和正解
a)小地图

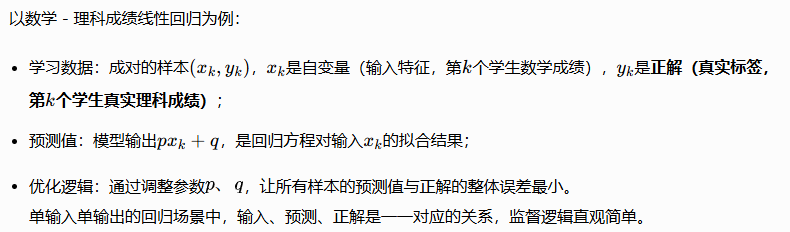
b)回归分析场景:学习数据与正解的基础范式
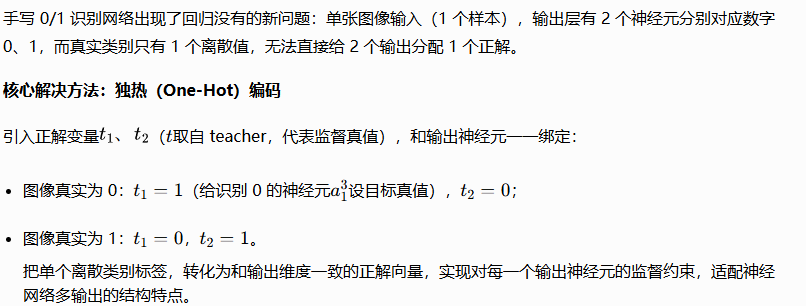
c)神经网络场景:多输出结构的正解编码方案
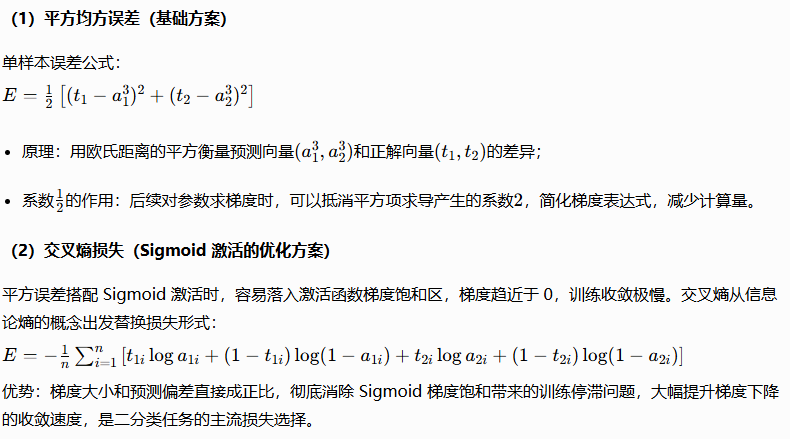
d)两类误差损失函数的数学逻辑
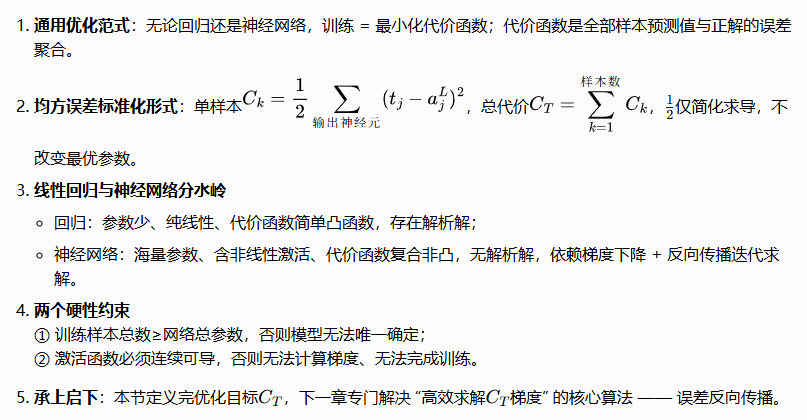
神经网络的代价函数
a)小地图
b)核心定义:学习 = 最优化,代价函数 = 优化目标函数

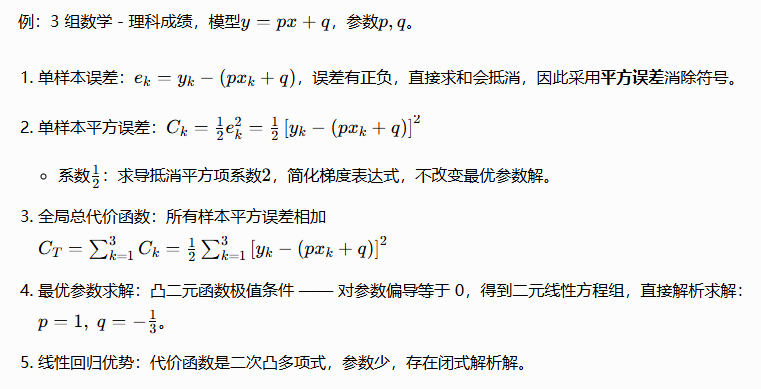
c)回归分析案例:线性模型代价函数(可解析求解)
d)范式统一:回归与神经网络优化逻辑完全等价
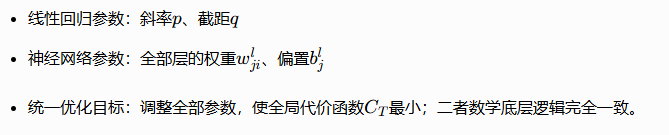
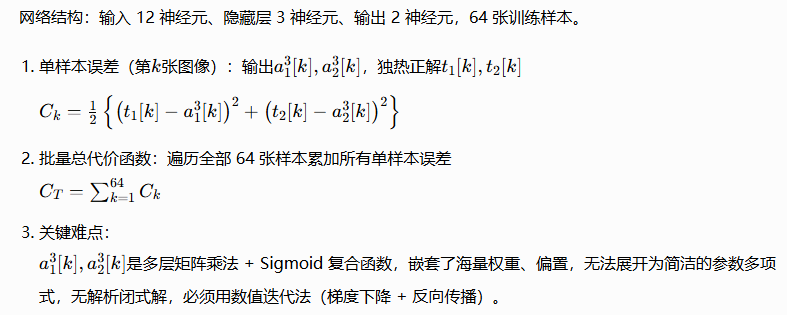
e)多层神经网络代价函数推导(手写 0/1 识别网络)
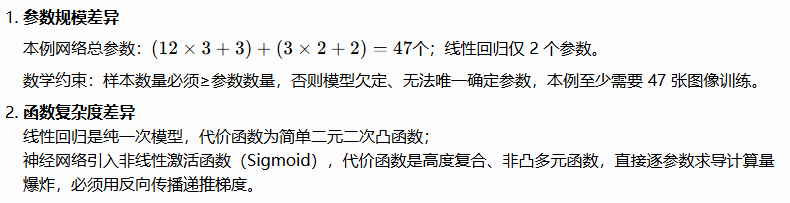
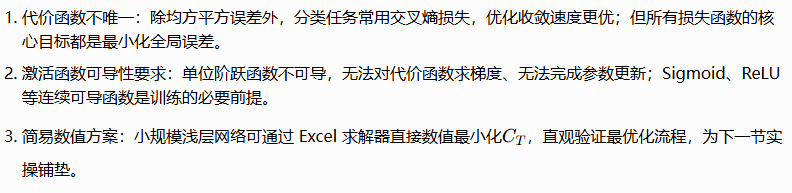
f)神经网络 vs 线性回归两大核心差异
g)补充
h)总结