说明:本文根据软控深圳电气公开产品资料整理,定位为工业自动化产品学习与选型参考。实际项目以厂家最新技术资料、样本和现场测试结果为准。
在自动化设备里,运动控制往往是整机性能的"底层骨架":伺服轴能不能稳定同步、现场总线实时性够不够、上位机和控制器之间协作是否顺畅,都会直接影响设备节拍、精度和可维护性。
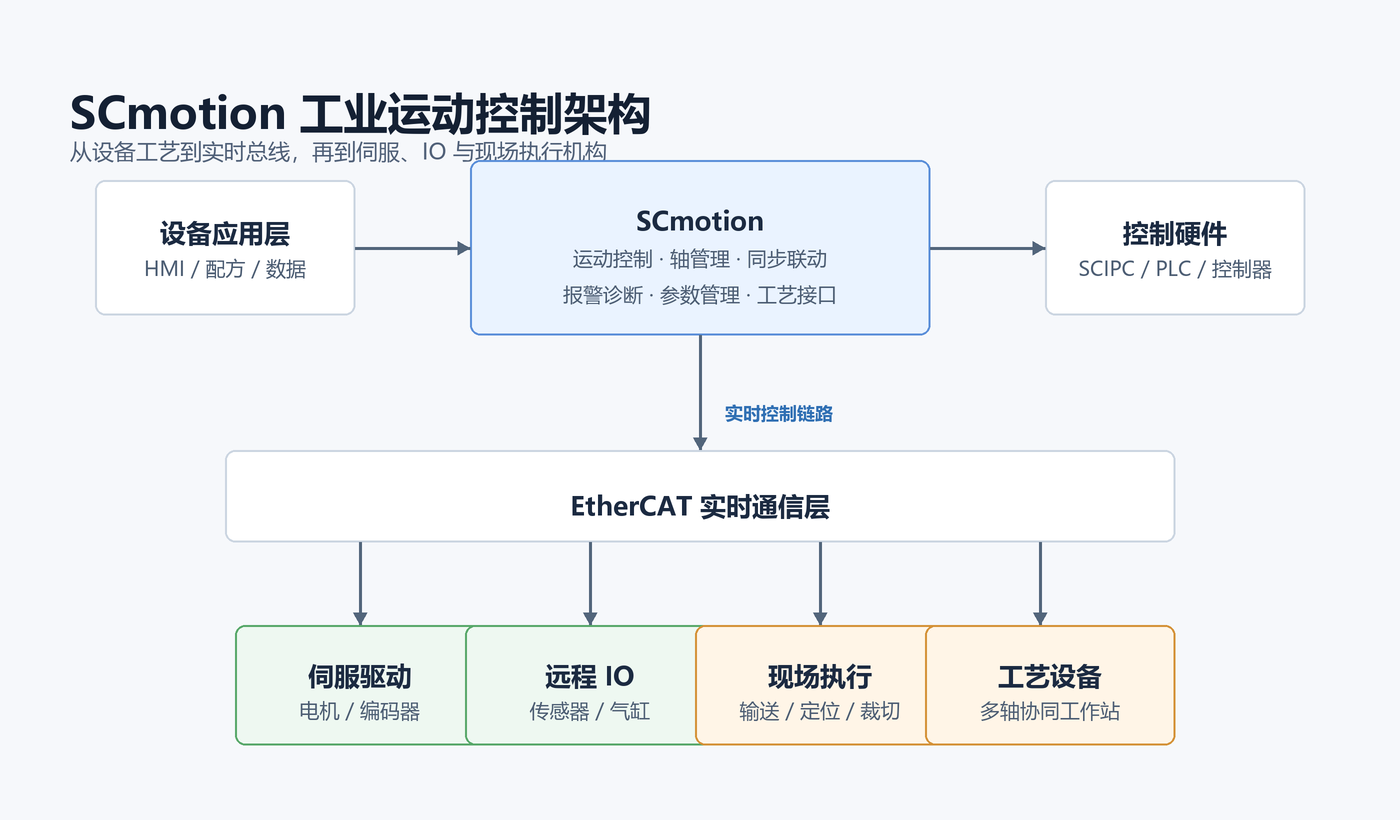
软控深圳电气的 SCmotion 可以理解为一套面向工业设备控制的软件平台。它通常不会单独存在,而是与 SCIPC 工业控制平台、PLC/运动控制器、EtherCAT IO、伺服驱动与现场执行机构 组合使用,形成从控制算法、实时通信到设备动作执行的完整链路。

1. SCmotion 解决的是什么问题?
传统设备控制里,经常会遇到几类典型矛盾:
- 设备轴数越来越多,单轴调试容易,多轴同步和节拍优化变难;
- 控制逻辑、运动逻辑、人机交互分散在不同系统里,后期维护成本高;
- 现场 IO、伺服、视觉、传感器等模块越来越多,通信实时性和稳定性要求更高;
- 工艺变化频繁,设备软件需要能快速调整,而不是每次都大改控制程序。
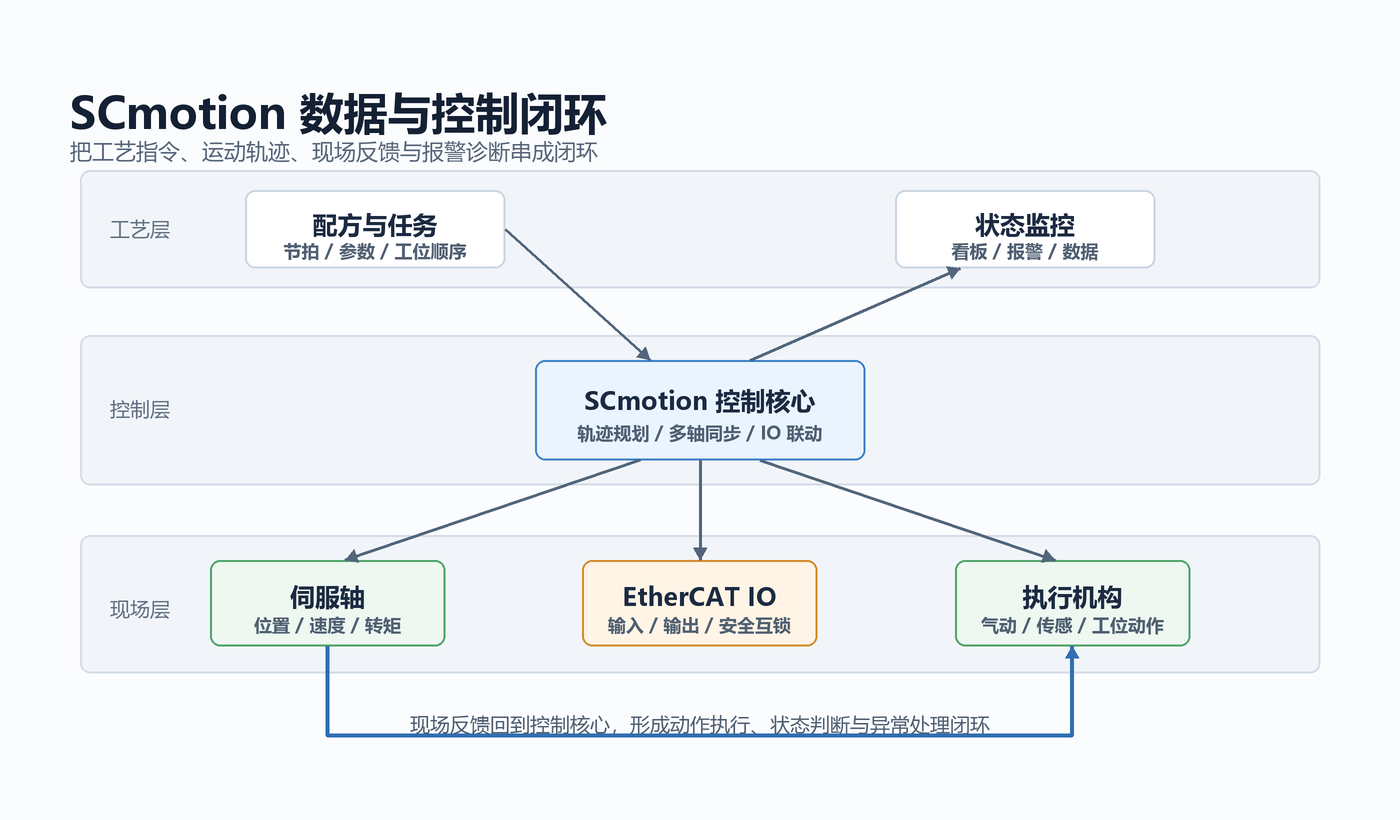
SCmotion 的价值就在于把运动控制相关能力平台化:通过统一的软件环境和实时控制能力,把设备中的轴控制、插补、同步、IO 联动、报警诊断、参数管理等能力组织起来,让设备开发从"堆功能"转向"搭平台"。
2. 从系统层看:SCmotion 在设备里处于什么位置?
一个典型设备控制系统可以拆成四层:
| 层级 | 典型内容 | 关注点 |
|---|---|---|
| 设备应用层 | HMI、工艺配方、状态监控、数据记录 | 易用性、工艺适配、运维效率 |
| 控制软件层 | SCmotion、控制逻辑、运动控制算法 | 多轴协同、实时控制、逻辑组织 |
| 实时通信层 | EtherCAT 总线、远程 IO、驱动通信 | 周期稳定、低延迟、可扩展 |
| 执行层 | 伺服驱动、电机、气缸、传感器、执行机构 | 精度、响应、可靠性 |
在这个结构里,SCmotion 更接近"控制软件层"的核心组件。它向上承接设备工艺逻辑和人机界面,向下通过实时总线和控制硬件连接 IO、伺服轴和执行机构。
3. 为什么工业现场偏爱 EtherCAT + 运动控制平台?
对于多轴设备来说,通信周期的稳定性非常关键。EtherCAT 的优势在于可以用较高效率完成多个从站的数据交换,适合伺服轴、远程 IO、编码器、传感器等现场模块的统一接入。
SCmotion 与 EtherCAT IO、运动控制器组合时,设备开发者通常能获得几个直接收益:
- 轴与 IO 更容易联动:运动动作、传感器触发、气缸动作可以放在统一节拍下协调;
- 扩展更清晰:增加轴数或 IO 点位时,系统结构更容易保持一致;
- 调试链路更短:总线状态、轴状态、报警信息和参数配置可以围绕统一平台展开;
- 实时性更可控:相比普通上位机轮询式控制,实时控制链路更适合高速设备。
4. 典型应用场景
SCmotion 这类运动控制平台,适合出现在对节拍、轨迹和同步要求较高的设备中,例如:
- 轮胎、橡胶、化工等行业的自动化生产装备;
- 多轴伺服联动设备,例如输送、定位、裁切、贴合、搬运、检测联动;
- 需要配方切换和工艺参数管理的连续生产设备;
- 需要上位机、PLC、IO、伺服驱动共同协作的非标自动化设备;
- 对稳定运行、报警诊断和后期维护有要求的产线设备。
这里需要注意:SCmotion 并不是简单替代某一个 PLC 或某一个伺服驱动。更合理的理解是,它帮助设备厂把运动控制和现场控制能力整合成可复用的平台。
5. 对设备厂的实际意义
从设备厂角度看,运动控制平台的意义不只是"能让电机转起来",而是帮助整机软件形成可复用资产。
5.1 缩短开发周期
标准化的轴控制、IO 联动、参数管理和诊断逻辑可以复用,减少每台设备从零写控制程序的工作量。
5.2 提升设备一致性
相同平台、相同通信架构、相同调试方法,有助于降低不同项目之间的软件差异,让交付和售后更稳定。
5.3 方便工艺迭代
当设备需要调整节拍、动作顺序、同步关系或配方参数时,平台化软件比零散逻辑更容易维护。
5.4 强化故障定位
运动控制系统常见问题包括轴报警、总线异常、IO 信号不到位、参数错误等。统一平台能让故障信息更集中,减少现场排查时间。
6. 选型和导入时建议重点关注什么?
如果准备在项目里评估 SCmotion,建议从以下几个维度看,而不是只看单点参数。
| 评估项 | 建议关注的问题 |
|---|---|
| 轴数与同步 | 当前轴数、未来扩展轴数、多轴同步精度要求 |
| 通信架构 | EtherCAT 从站数量、IO 点位、总线周期、拓扑规划 |
| 控制硬件 | SCIPC、PLC、运动控制器与现场设备的匹配关系 |
| 工艺复杂度 | 是否需要插补、电子凸轮、同步跟随、配方切换 |
| 调试维护 | 是否支持清晰的报警诊断、参数备份、状态监控 |
| 现场环境 | 抗干扰、温度、布线、接地、柜内空间和运维习惯 |
对于新项目,建议先做一个最小闭环验证:选取 1 到 2 个关键工位,验证总线通信、伺服控制、IO 联动、报警诊断和节拍表现。通过后再扩展到整机或整线,会比一开始全量铺开更稳妥。
7. 一个简化的项目导入流程
- 梳理设备动作流程:明确每个工位、轴、IO、传感器和安全互锁关系。
- 规划控制架构:确定 SCIPC/PLC/运动控制器、EtherCAT 从站和执行层设备。
- 建立基础通信:完成 EtherCAT 拓扑、从站识别、IO 映射和伺服参数配置。
- 实现关键运动:先做核心轴动作和多轴同步,再补充辅助动作。
- 接入工艺逻辑:加入配方、节拍、报警、权限和状态监控。
- 做现场验证:重点测试异常恢复、断电重启、极限工况和连续运行稳定性。
8. 总结
SCmotion 的核心价值不在于某一个单独功能,而在于把工业设备里的运动控制、实时通信、IO 联动和调试诊断组织成一个更清晰的平台。对于多轴设备、复杂工艺设备和需要长期维护的产线来说,这类平台能帮助设备厂提升开发效率、设备一致性和现场可维护性。
如果项目本身已经涉及多轴同步、EtherCAT 总线、配方切换和复杂 IO 联动,那么在前期方案阶段就把 SCmotion 作为控制平台进行评估,会比后期遇到节拍和维护问题后再补救更主动。
建议标签 :工业自动化 运动控制 EtherCAT PLC 软控SCmotion 设备控制