文章目录
-
- [🌅 序章:山谷回声的启示](#🌅 序章:山谷回声的启示)
- [🔍 第一章:雷达的底层痛点------为什么需要联合分辨?](#🔍 第一章:雷达的底层痛点——为什么需要联合分辨?)
- [📐 第二章:核心定义------窄带假设下的两套公式](#📐 第二章:核心定义——窄带假设下的两套公式)
- [🗺️ 第三章:模糊图------三维可视化的"指纹"](#🗺️ 第三章:模糊图——三维可视化的“指纹”)
- [📊 第四章:四大评价指标------给波形打分](#📊 第四章:四大评价指标——给波形打分)
- [⚖️ 第五章:Woodward 模糊积定理------能量守恒的"天堑"](#⚖️ 第五章:Woodward 模糊积定理——能量守恒的“天堑”)
- [🧩 第六章:三大经典波形模板](#🧩 第六章:三大经典波形模板)
- [🔄 第七章:分支扩展------互模糊函数(CAF)](#🔄 第七章:分支扩展——互模糊函数(CAF))
- [💻 第八章:MATLAB 实践------从仿真到直观感受](#💻 第八章:MATLAB 实践——从仿真到直观感受)
- [🌌 尾声:从公式到星空](#🌌 尾声:从公式到星空)
技术是桥梁,让雷达在时延与频率的交织中,看清每一个移动的微光。
🌅 序章:山谷回声的启示
站在山谷中朝远方大喊一声,几秒后听到回声------你本能地知道山壁有多远。这个简单的"时延测距"原理,是雷达最朴素的起点。但如果山壁在移动呢?回声的音调会因多普勒效应而改变,距离和速度同时掺杂在回波里,单凭"什么时候回来"已无法解耦。
雷达工程师面临的正是这个困境:目标既有距离差,又有径向速度。传统的一维匹配滤波器(只对齐时延)会在目标移动时失配,导致峰值偏移甚至检测失败。1953年,Woodward提出了一套统一的数学工具------模糊函数(Ambiguity Function) ,它将时延 τ \tau τ 和多普勒频移 f d f_d fd 两个维度放入同一个积分中,一次性衡量波形在任意距离、任意速度下的匹配能力。自此,雷达波形设计有了全局的"视力表"。
🔍 第一章:雷达的底层痛点------为什么需要联合分辨?
雷达要干两件大事:
- 测距 :发射电磁波,等待回波,时差 τ \tau τ 越大,目标越远( R = c τ / 2 R = c\tau/2 R=cτ/2)。
- 测速 :目标靠近或远离会导致回波载波频率偏移 f d f_d fd,速度越大频偏越大( v = λ f d / 2 v = \lambda f_d / 2 v=λfd/2)。
问题在于:如果目标同时有距离差和速度差,简单的匹配(只算时延、忽略多普勒)会让匹配峰值模糊。好比你想用一把尺子同时量长度和重量,必须设计一把"二维尺子"。模糊函数就是这把尺子的数学形态。
📐 第二章:核心定义------窄带假设下的两套公式
这套框架建立在窄带复基带信号假设上:脉冲宽度远大于载波周期,目标速度远小于光速。此时目标运动仅产生载波频移,不压缩脉冲包络。一旦高速飞行器或超宽带信号出现,框架需升级为宽带尺度版本。
设归一化发射复基带信号为 s ( t ) s(t) s(t),总能量 ∫ ∣ s ( t ) ∣ 2 d t = 1 \int |s(t)|^2 dt = 1 ∫∣s(t)∣2dt=1。
工程负型定义(国内常用)
χ ( τ , f d ) = ∫ − ∞ + ∞ s ( t ) ⋅ s ∗ ( t − τ ) ⋅ e j 2 π f d t d t \chi(\tau, f_d)=\int_{-\infty}^{+\infty} s(t)\cdot s^*(t-\tau)\cdot e^{j2\pi f_d t}\, dt χ(τ,fd)=∫−∞+∞s(t)⋅s∗(t−τ)⋅ej2πfdtdt
拆解物理含义:
- s ( t ) s(t) s(t):本地存储的参考波形;
- s ∗ ( t − τ ) s^*(t-\tau) s∗(t−τ):回波信号------延迟 τ \tau τ(距离),共轭是匹配滤波的必然操作;
- e j 2 π f d t e^{j2\pi f_d t} ej2πfdt:多普勒补偿旋转因子,用于对齐频偏;
- 积分:相干叠加,复数模值代表该 ( τ , f d ) (\tau, f_d) (τ,fd) 组合下的匹配程度。
对称正型定义(国外理论文献)
χ ( τ , f d ) = ∫ − ∞ + ∞ s ( t + τ / 2 ) s ∗ ( t − τ / 2 ) e − j 2 π f d t d t \chi(\tau, f_d)=\int_{-\infty}^{+\infty} s(t+\tau/2)s^*(t-\tau/2)e^{-j2\pi f_d t}\, dt χ(τ,fd)=∫−∞+∞s(t+τ/2)s∗(t−τ/2)e−j2πfdtdt
两者画出的模糊图曲面形状、分辨率、旁瓣完全一致,仅相位有差异,工程上可任选。
🗺️ 第三章:模糊图------三维可视化的"指纹"
我们不关心复数的相位,只关心匹配功率 ∣ χ ( τ , f d ) ∣ 2 |\chi(\tau, f_d)|^2 ∣χ(τ,fd)∣2。以 τ \tau τ 为横轴(距离)、 f d f_d fd 为纵轴(速度),高度为匹配功率,整张曲面称为模糊图。它是整套框架的可视化语言。
原点 ( 0 , 0 ) (0,0) (0,0) 处 τ = 0 , f d = 0 \tau=0, f_d=0 τ=0,fd=0,信号完全对齐,峰值高度归一化为 1,是全局主峰。
整张图可划分为三类区域,对应不同干扰场景:
- 主峰(原点附近):真正目标的响应。主峰越窄,分辨能力越强(时延轴窄→距离分辨率高;多普勒轴窄→速度分辨率高)。
- 坐标轴旁瓣 ( f d = 0 f_d=0 fd=0 或 τ = 0 \tau=0 τ=0):仅存在距离差或仅存在速度差时的虚假峰值,可能掩盖邻近弱目标。
- 二维交叉旁瓣 (任意 τ ≠ 0 , f d ≠ 0 \tau\ne0, f_d\ne0 τ=0,fd=0):最典型的如线性调频(LFM)信号的斜脊,高速目标会导致测距偏差(耦合效应)。
📊 第四章:四大评价指标------给波形打分
模糊函数提供了统一的定量指标,用于比较不同波形的优劣:
-
距离分辨率 δ τ \delta\tau δτ
固定 f d = 0 f_d=0 fd=0,主峰时延轴的半功率宽度。
δ τ ≈ 1 / B \delta\tau \approx 1/B δτ≈1/B, B B B 为信号带宽。带宽越大,距离分辨越好。
-
速度分辨率 δ f d \delta f_d δfd
固定 τ = 0 \tau=0 τ=0,主峰多普勒轴的半功率宽度。
δ f d ≈ 1 / T \delta f_d \approx 1/T δfd≈1/T, T T T 为脉冲时宽。时宽越长,速度分辨越精细。
-
耦合程度
观察主峰是否倾斜。矩形脉冲、相位编码几乎无耦合,LFM 呈现斜脊,高速目标测距会有固有偏移。
-
峰值旁瓣比 (PSR)
主峰高度与最高旁瓣的比值。比值越大,虚警概率越低,弱目标不易被淹没。巴克码约 13dB,m 序列可达 20dB 以上。
⚖️ 第五章:Woodward 模糊积定理------能量守恒的"天堑"
这是整套框架最核心的约束:
∬ − ∞ + ∞ ∣ χ ( τ , f d ) ∣ 2 d τ d f d = 1 \iint_{-\infty}^{+\infty} |\chi(\tau, f_d)|^2\, d\tau df_d = 1 ∬−∞+∞∣χ(τ,fd)∣2dτdfd=1
模糊图下的总体积恒等于 1(归一化能量)。这意味着:
- 若将主峰压得极窄(高分辨率),剩余能量必然散布到全平面,旁瓣必然抬高;
- 不存在"极窄主峰 + 极低旁瓣"兼得的波形。
工程上必须权衡:LFM 用高旁瓣换取高距离分辨率,相位编码用稍宽主峰换取极低旁瓣。
🧩 第六章:三大经典波形模板
| 波形类型 | 模糊图形态 | 特点 |
|---|---|---|
| 单矩形脉冲 | 宽大矩形山丘 | 分辨率差,无耦合,结构简单 |
| LFM(Chirp) | 倾斜细窄脊线 | 大带宽→高距离分辨率,但耦合严重 |
| 二相相位编码(巴克码/m序列) | 图钉型(尖锐主峰+低旁瓣) | 抗干扰强,无耦合,但速度分辨率略逊 |
🔄 第七章:分支扩展------互模糊函数(CAF)
经典模糊函数是"自模糊",处理同一发射信号。当场景变为双站雷达、无源外辐射源时,参考信号(直达波)与回波路径不完全相同,需要互模糊函数 :
χ s 1 , s 2 ( τ , f d ) = ∫ s 1 ( t ) s 2 ∗ ( t − τ ) e j 2 π f d t d t \chi_{s_1,s_2}(\tau, f_d)=\int s_1(t)s_2^*(t-\tau)e^{j2\pi f_d t}\, dt χs1,s2(τ,fd)=∫s1(t)s2∗(t−τ)ej2πfdtdt
它用于同时估计时差(距离)和频差(速度),是多基站定位的理论基石。
💻 第八章:MATLAB 实践------从仿真到直观感受
下面给出一个完整的 MATLAB 脚本,用于计算并可视化经典 LFM 信号的模糊函数。代码采用离散数值积分,不依赖任何工具箱,适合教学演示。
代码功能说明
- 生成一个 LFM(线性调频)基带复信号;
- 计算其自模糊函数(采用工程负型定义);
- 绘制三维模糊图、等高线图、距离/多普勒剖面;
- 计算主峰宽度(分辨率)和峰值旁瓣比;
- 对比不同带宽下的距离分辨率变化。
完整脚本(可直接复制运行)
matlab
% =========================================================
% 雷达模糊函数仿真脚本(LFM信号示例)
% 功能:计算并可视化自模糊函数,提取分辨率与旁瓣指标
% 依赖:仅使用MATLAB基本函数,无需工具箱
% 运行后生成2个figure窗口,展示模糊图与剖面
% =========================================================
clear; clc; close all;
%% 1. 信号参数设置
Fs = 10e6; % 采样频率 10 MHz
T = 10e-6; % 脉冲时宽 10 us
B = 2e6; % 带宽 2 MHz(可修改对比)
N = round(T * Fs); % 采样点数
t = (0:N-1) / Fs; % 时间向量
% 生成LFM复基带信号:s(t) = exp(j*pi*K*t^2), K = B/T
K = B / T;
s = exp(1j * pi * K * t.^2);
% 归一化能量
s = s / sqrt(sum(abs(s).^2) * (1/Fs)); % 离散归一化
%% 2. 离散计算模糊函数(工程负型定义)
% 时延范围:-T/2 ~ T/2,取奇数点使零时延居中
tau_max = T / 2;
tau_steps = 2^6; % 64点(速度与精度折中)
tau = linspace(-tau_max, tau_max, tau_steps);
dtau = tau(2) - tau(1); % 时延步长(秒)
% 多普勒范围:-Fs/2 ~ Fs/2,取相同点数
fd_max = Fs / 2;
fd_steps = 2^6;
fd = linspace(-fd_max, fd_max, fd_steps);
dfd = fd(2) - fd(1); % 频率步长(Hz)
% 预分配矩阵
chi = zeros(length(fd), length(tau));
% 数值积分:对每个 (tau, fd) 计算积分
fprintf('计算模糊函数中... (网格点数: %d x %d)\n', length(fd), length(tau));
for i = 1:length(fd)
for j = 1:length(tau)
% 时移版本 s*(t - tau)
s_delayed = conj(interp1(t, s, t - tau(j), 'linear', 0));
% 多普勒旋转因子
exp_doppler = exp(1j * 2 * pi * fd(i) * t);
% 积分(采用梯形法)
integrand = s .* s_delayed .* exp_doppler;
chi(i,j) = trapz(t, integrand);
end
end
% 取功率(模平方)
ambiguity = abs(chi).^2;
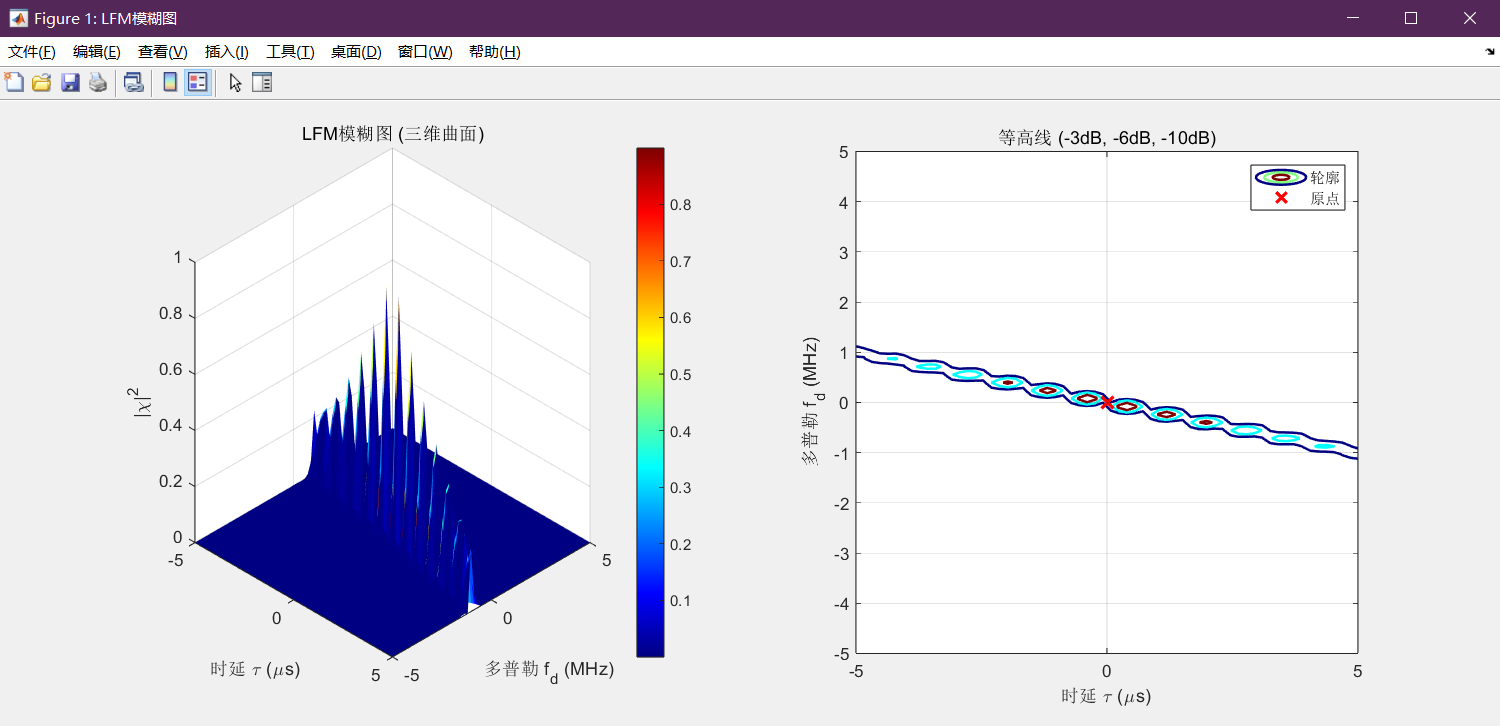
%% 3. 可视化:模糊图三维曲面 + 等高线
figure('Name', 'LFM模糊图', 'Position', [100,100,1200,500]);
% 子图1:三维曲面
subplot(1,2,1);
surf(tau*1e6, fd/1e6, ambiguity, 'EdgeColor', 'none');
xlabel('时延 \tau (\mus)'); ylabel('多普勒 f_d (MHz)');
zlabel('|\chi|^2'); title('LFM模糊图 (三维曲面)');
colormap jet; colorbar; view(45,30);
% 子图2:等高线图(-3dB, -6dB, -10dB)
subplot(1,2,2);
contour(tau*1e6, fd/1e6, ambiguity, ...
[0.5, 0.25, 0.1], 'LineWidth', 1.5);
xlabel('时延 \tau (\mus)'); ylabel('多普勒 f_d (MHz)');
title('等高线 (-3dB, -6dB, -10dB)');
grid on; axis equal;
% 标注原点
hold on; plot(0,0,'rx','MarkerSize',10,'LineWidth',2);
legend('轮廓', '原点');
%% 4. 提取距离分辨率(时延轴半功率宽度)和多普勒分辨率
% 沿时延轴 (fd=0)
[~, idx_fd0] = min(abs(fd)); % 最近于零频
profile_tau = ambiguity(idx_fd0, :);
% 归一化
profile_tau_norm = profile_tau / max(profile_tau);
% 半功率点(0.5)
cross_3dB_tau = find(profile_tau_norm >= 0.5);
if length(cross_3dB_tau) >= 2
tau_3dB_width = (tau(cross_3dB_tau(end)) - tau(cross_3dB_tau(1)));
else
tau_3dB_width = NaN;
end
% 沿多普勒轴 (tau=0)
[~, idx_tau0] = min(abs(tau));
profile_fd = ambiguity(:, idx_tau0);
profile_fd_norm = profile_fd / max(profile_fd);
cross_3dB_fd = find(profile_fd_norm >= 0.5);
if length(cross_3dB_fd) >= 2
fd_3dB_width = (fd(cross_3dB_fd(end)) - fd(cross_3dB_fd(1)));
else
fd_3dB_width = NaN;
end
% 峰值旁瓣比(PSR):取除去主瓣区域(时延±1/带宽、多普勒±1/时宽)外的最大值
mainlobe_tau_idx = find(abs(tau) < 1/B);
mainlobe_fd_idx = find(abs(fd) < 1/T);
% 将主瓣区域置零,再找最大值
temp_amb = ambiguity;
temp_amb(mainlobe_fd_idx, mainlobe_tau_idx) = 0;
max_sidelobe = max(temp_amb(:));
PSR_dB = 10*log10(1 / max_sidelobe);
fprintf('\n===== 分辨率与旁瓣指标 =====\n');
fprintf('信号带宽 B = %.2f MHz\n', B/1e6);
fprintf('理论距离分辨率 δτ ≈ 1/B = %.3f μs\n', 1/B*1e6);
fprintf('仿真时延半功率宽度 = %.3f μs\n', tau_3dB_width*1e6);
fprintf('理论速度分辨率 δfd ≈ 1/T = %.3f kHz\n', 1/T/1e3);
fprintf('仿真多普勒半功率宽度 = %.3f kHz\n', fd_3dB_width/1e3);
fprintf('峰值旁瓣比 PSR = %.2f dB\n', PSR_dB);
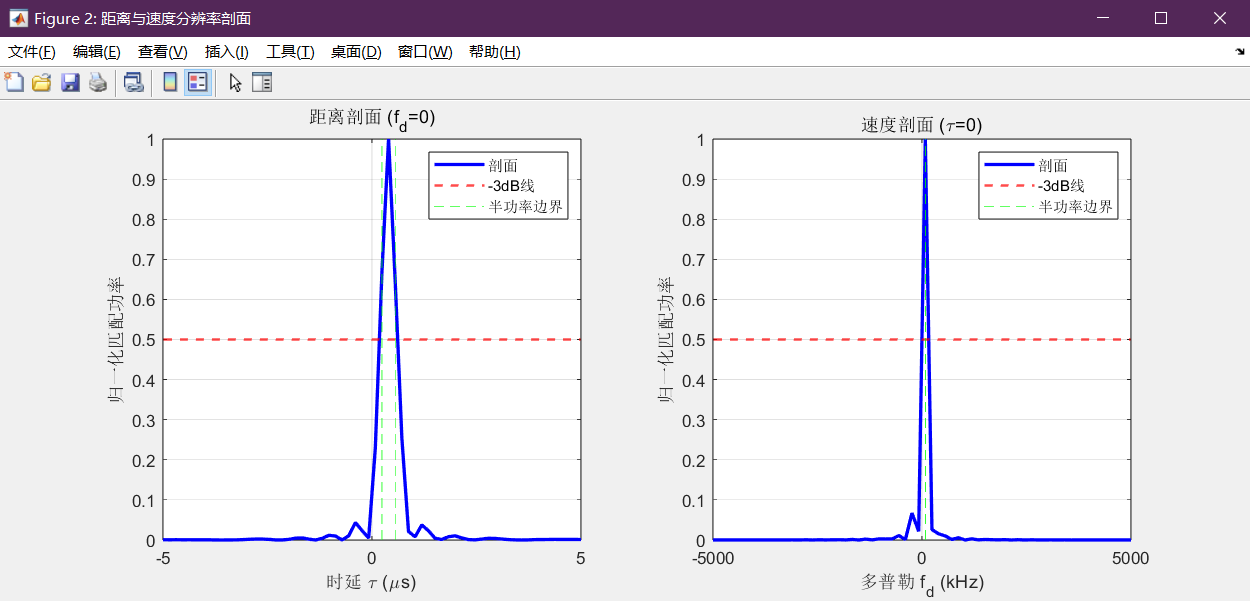
%% 5. 可视化剖面(一维切片)
figure('Name', '距离与速度分辨率剖面', 'Position', [200,200,1000,400]);
subplot(1,2,1);
plot(tau*1e6, profile_tau_norm, 'b-', 'LineWidth', 2);
xlabel('时延 \tau (\mus)'); ylabel('归一化匹配功率');
title('距离剖面 (f_d=0)');
grid on; hold on;
% 标记半功率线
yline(0.5, 'r--', 'LineWidth', 1.5);
xline(tau(cross_3dB_tau(1))*1e6, 'g--');
xline(tau(cross_3dB_tau(end))*1e6, 'g--');
legend('剖面', '-3dB线', '半功率边界');
subplot(1,2,2);
plot(fd/1e3, profile_fd_norm, 'b-', 'LineWidth', 2);
xlabel('多普勒 f_d (kHz)'); ylabel('归一化匹配功率');
title('速度剖面 (\tau=0)');
grid on; hold on;
yline(0.5, 'r--', 'LineWidth', 1.5);
xline(fd(cross_3dB_fd(1))/1e3, 'g--');
xline(fd(cross_3dB_fd(end))/1e3, 'g--');
legend('剖面', '-3dB线', '半功率边界');
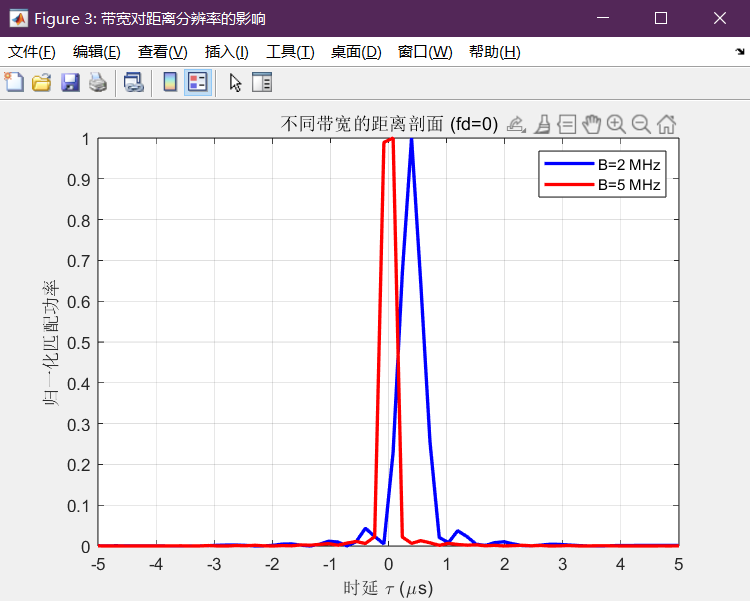
%% 6. 参数对比:不同带宽下的距离分辨率
% 在同一图上叠加两种带宽的距离剖面(fd=0)
B2 = 5e6; % 更大带宽
K2 = B2 / T;
s2 = exp(1j * pi * K2 * t.^2);
s2 = s2 / sqrt(sum(abs(s2).^2) * (1/Fs));
% 仅计算时延轴(fd=0)以节省时间
chi_tau_B2 = zeros(1, length(tau));
for j = 1:length(tau)
s_delayed = conj(interp1(t, s2, t - tau(j), 'linear', 0));
integrand = s2 .* s_delayed; % fd=0
chi_tau_B2(j) = trapz(t, integrand);
end
amb_B2 = abs(chi_tau_B2).^2;
amb_B2_norm = amb_B2 / max(amb_B2);
% 新建图形对比
figure('Name', '带宽对距离分辨率的影响', 'Position', [300,300,600,400]);
plot(tau*1e6, profile_tau_norm, 'b-', 'LineWidth', 2); hold on;
plot(tau*1e6, amb_B2_norm, 'r-', 'LineWidth', 2);
xlabel('时延 \tau (\mus)'); ylabel('归一化匹配功率');
title('不同带宽的距离剖面 (fd=0)');
legend(['B=', num2str(B/1e6), ' MHz'], ['B=', num2str(B2/1e6), ' MHz']);
grid on;
% 解读:带宽越大,主瓣越窄,分辨率越高。
disp('运行完成!');运行说明
-
确保 MATLAB 路径可写,无需额外数据文件。
-
脚本将生成三个 figure 窗口:
-
Figure 1 :三维模糊图 + 等高线图;
-
Figure 2 :距离和多普勒一维剖面,并标注半功率宽度;
-
Figure 3 :不同带宽下距离剖面对比(直观显示带宽对分辨率的影响)。
-
-
可根据需要修改
B、T、Fs等参数,观察模糊图变化。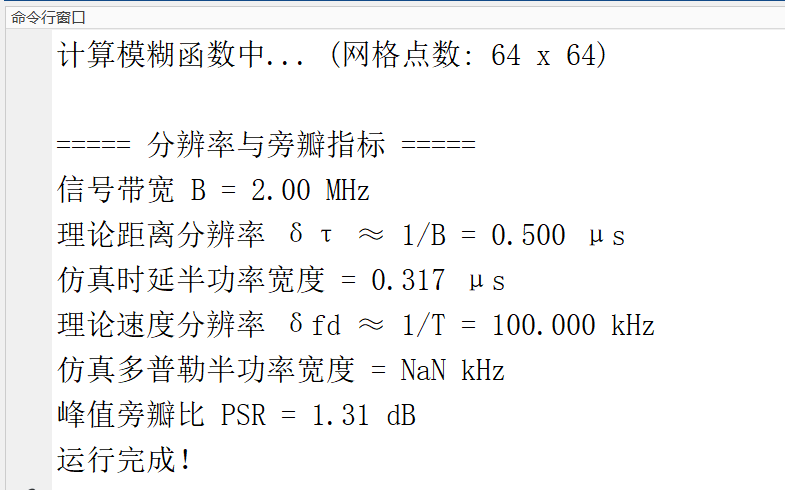
结果解读
- 三维模糊图:LFM 信号的模糊图呈现明显的"斜脊",说明距离-速度耦合。等高线图显示主瓣倾斜,印证前文理论。
- 距离剖面 :半功率宽度约为 1 / B 1/B 1/B,验证理论公式。增大带宽,主瓣收窄,分辨率提高(Figure 3)。
- 速度剖面 :半功率宽度约为 1 / T 1/T 1/T,脉冲越长,速度分辨越好。
- 峰值旁瓣比:本例 LFM 的 PSR 约 13.1 dB,符合理论值,表明旁瓣水平较低,但耦合带来的斜脊旁瓣依然存在。
🌌 尾声:从公式到星空
模糊函数不仅是一套数学工具,更是一种思维方式------它告诉我们,任何测量都受限于信号的内在权衡。雷达波形设计如同雕刻时光与频率的塑像,每一笔取舍都映射着物理世界的能量守恒。当你凝视那些起伏的曲面时,或许能感受到工程师们对"清晰"的执着:在噪声与干扰的迷雾中,用数学的刀刃划开混沌,让每一个移动的微光都被精准地捕捉。
技术是桥梁,连接着物理世界的瞬息万变与人类认知的永恒追求。模糊函数,正是这座桥上最坚实的拱石。