1.Simulink仿真结果
2.仿真模块分解
2.1 PI控制器部分
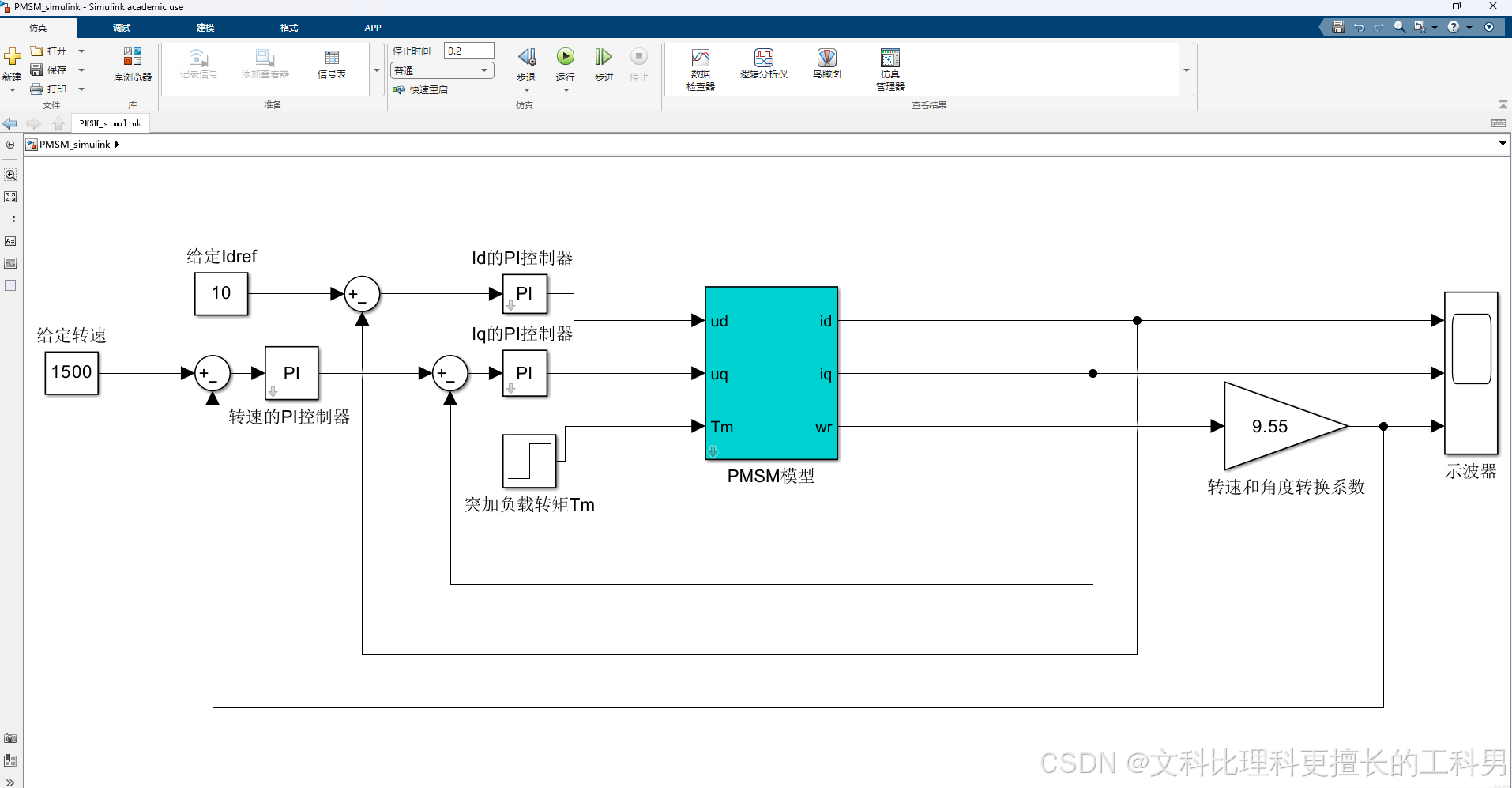
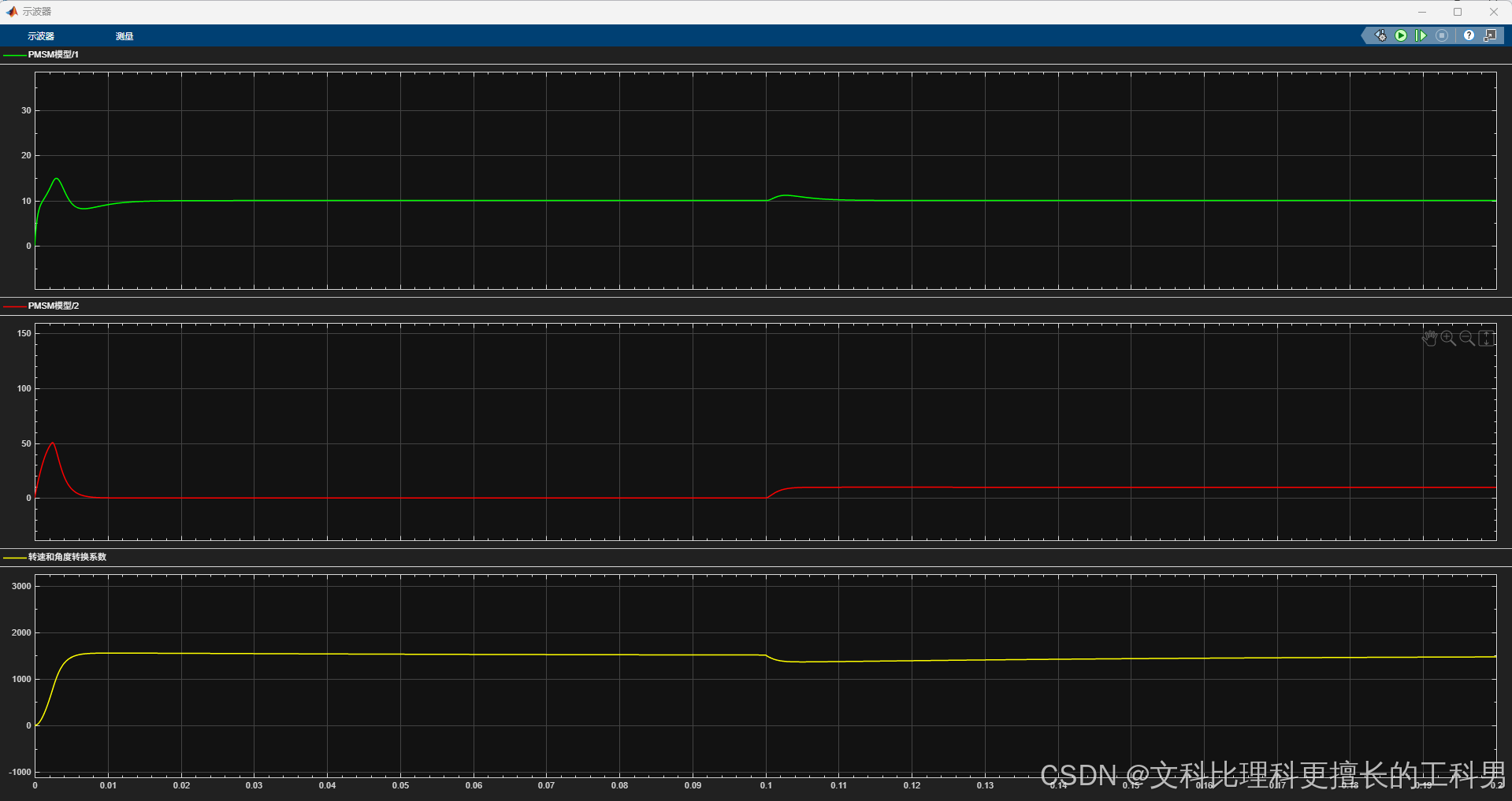
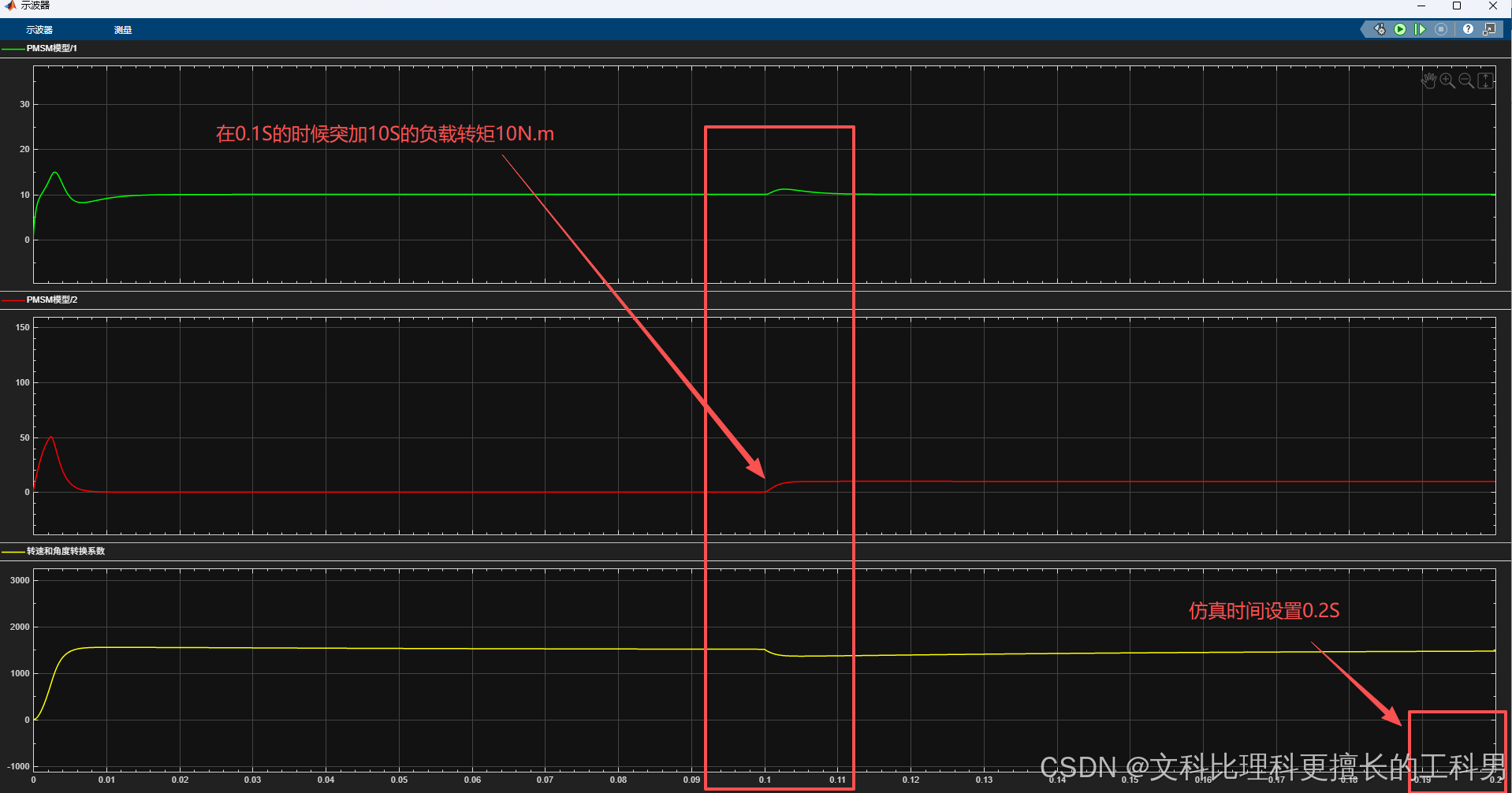
上面的仿真模型一共有个三个PI控制器,分别是转速的PI控制(也就是转速环),电流环两个(Id和Iq),并且设置给定电机转速N=1500RPM,Id=10A,负载转矩TL=10N.m,整个仿真时间是0.2S,在0.1S突加负载转矩,可以从波形看到能够迅速稳定。
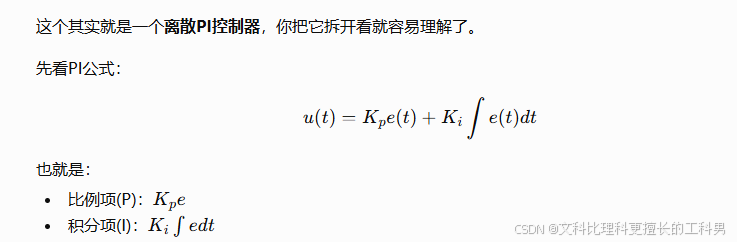
首先是PI控制器的解析,这三个PI控制器内部是一模一样的,只是设置的P和I参数不同。
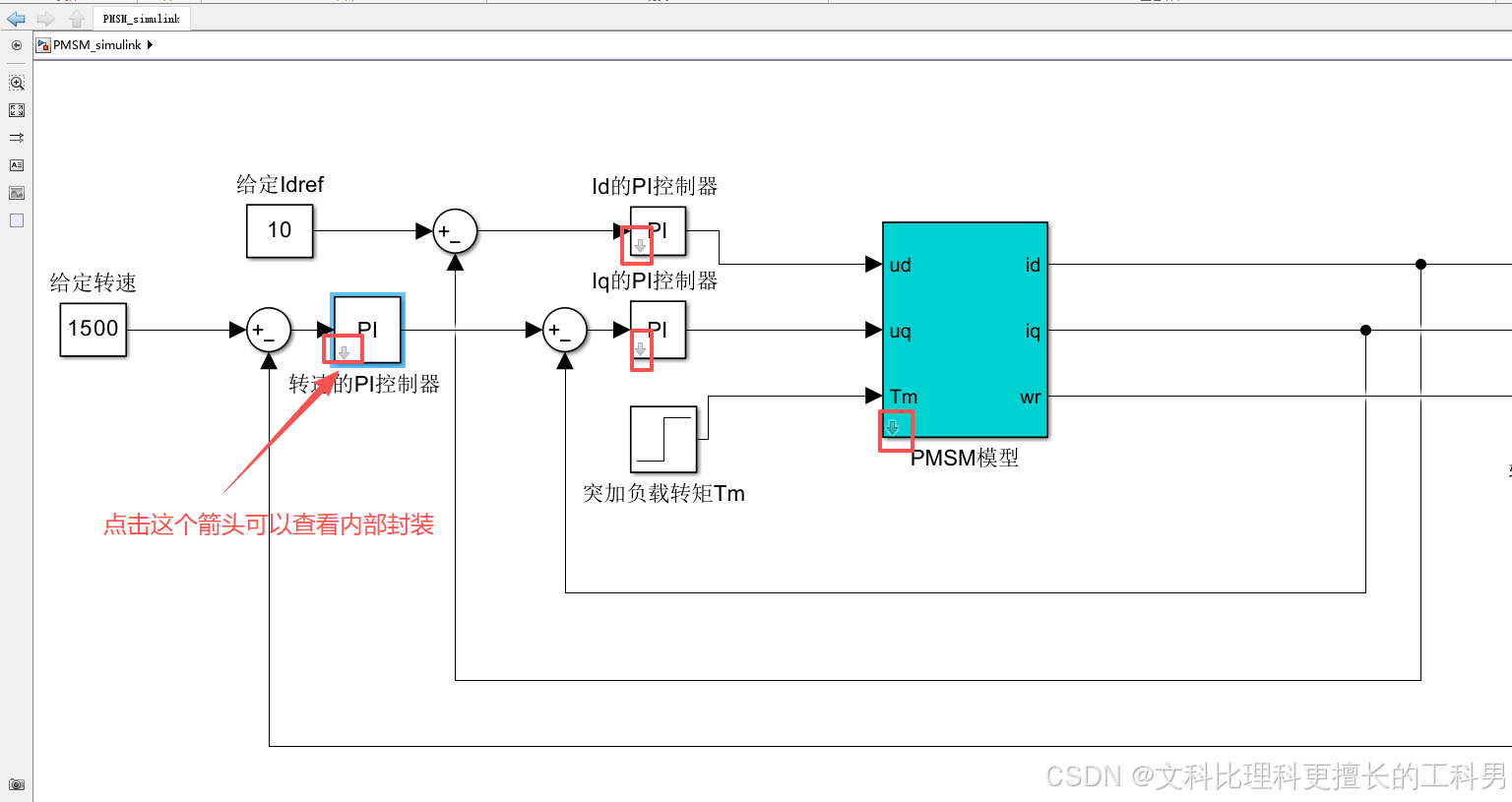
我们以转速PI控制器为例,点击进去后如下图所示
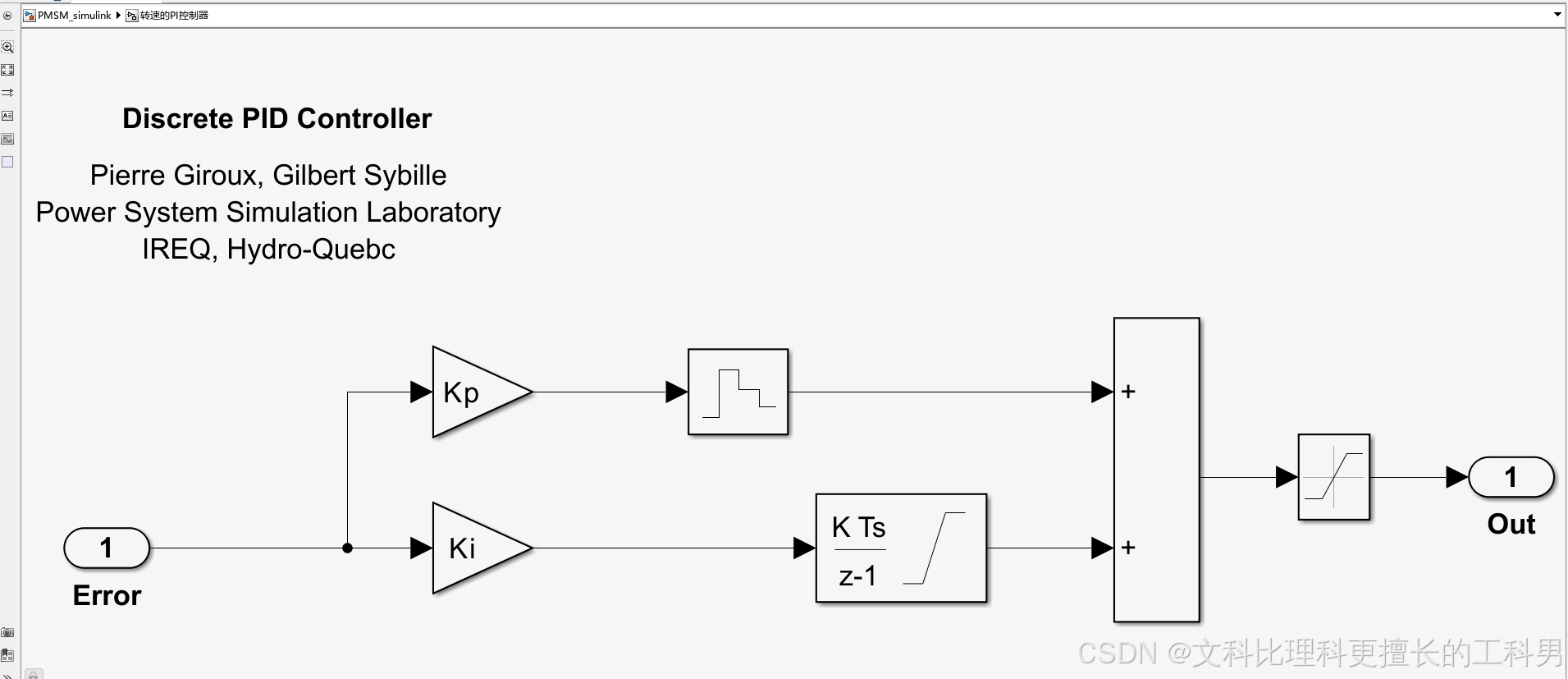
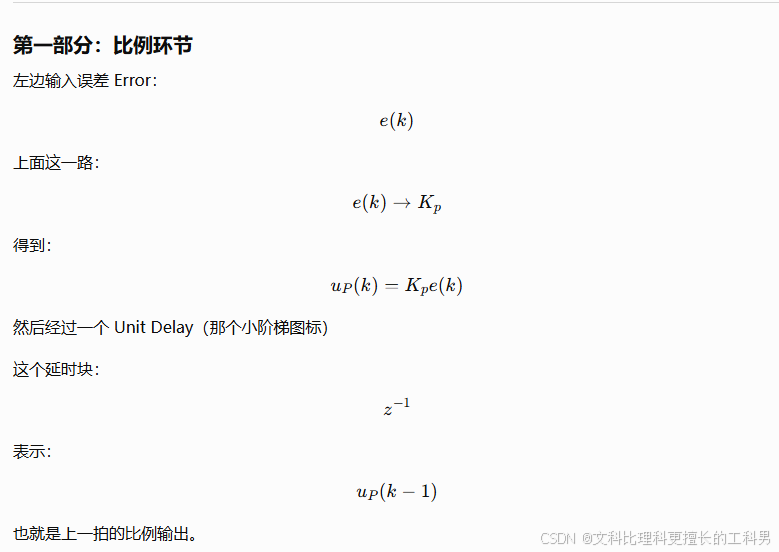

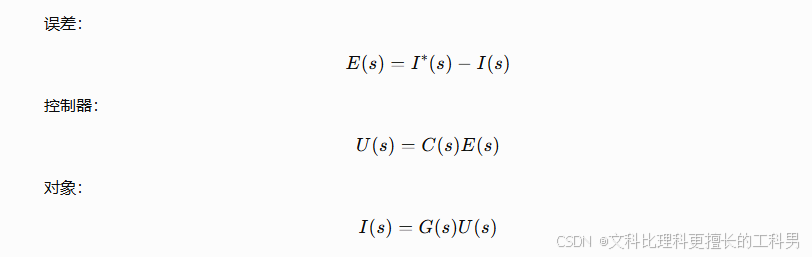
 任何一个模块都需要有输入和输出,转速PI控制器的输入就是给定输入和实际电机转速反馈的差值,即:
任何一个模块都需要有输入和输出,转速PI控制器的输入就是给定输入和实际电机转速反馈的差值,即:

因为这是速度环,所以输出是q轴电流给定值(转矩电流指令):
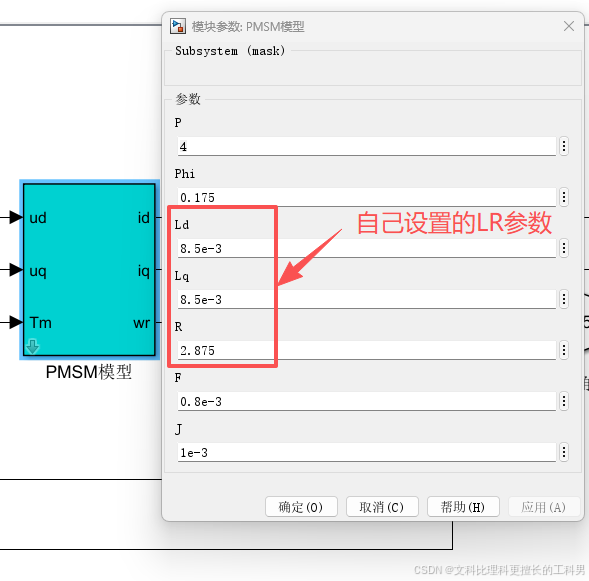
我们这个仿真模型是Ld=Lq,鼠标单击PMSM模型模块
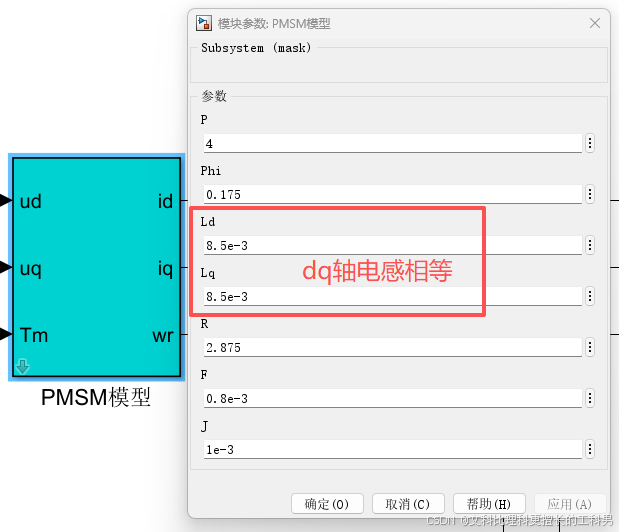
所以属于表贴式PMSM,那么:
2.2 PMSM模块部分
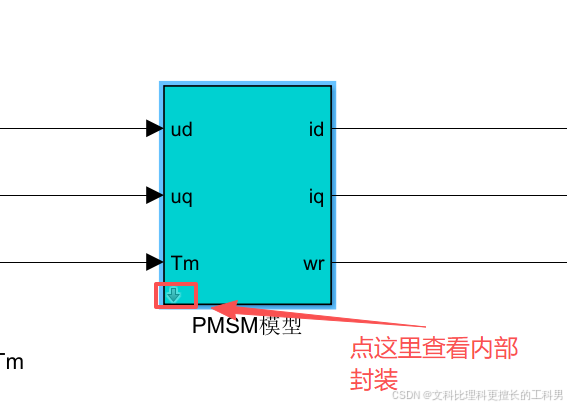
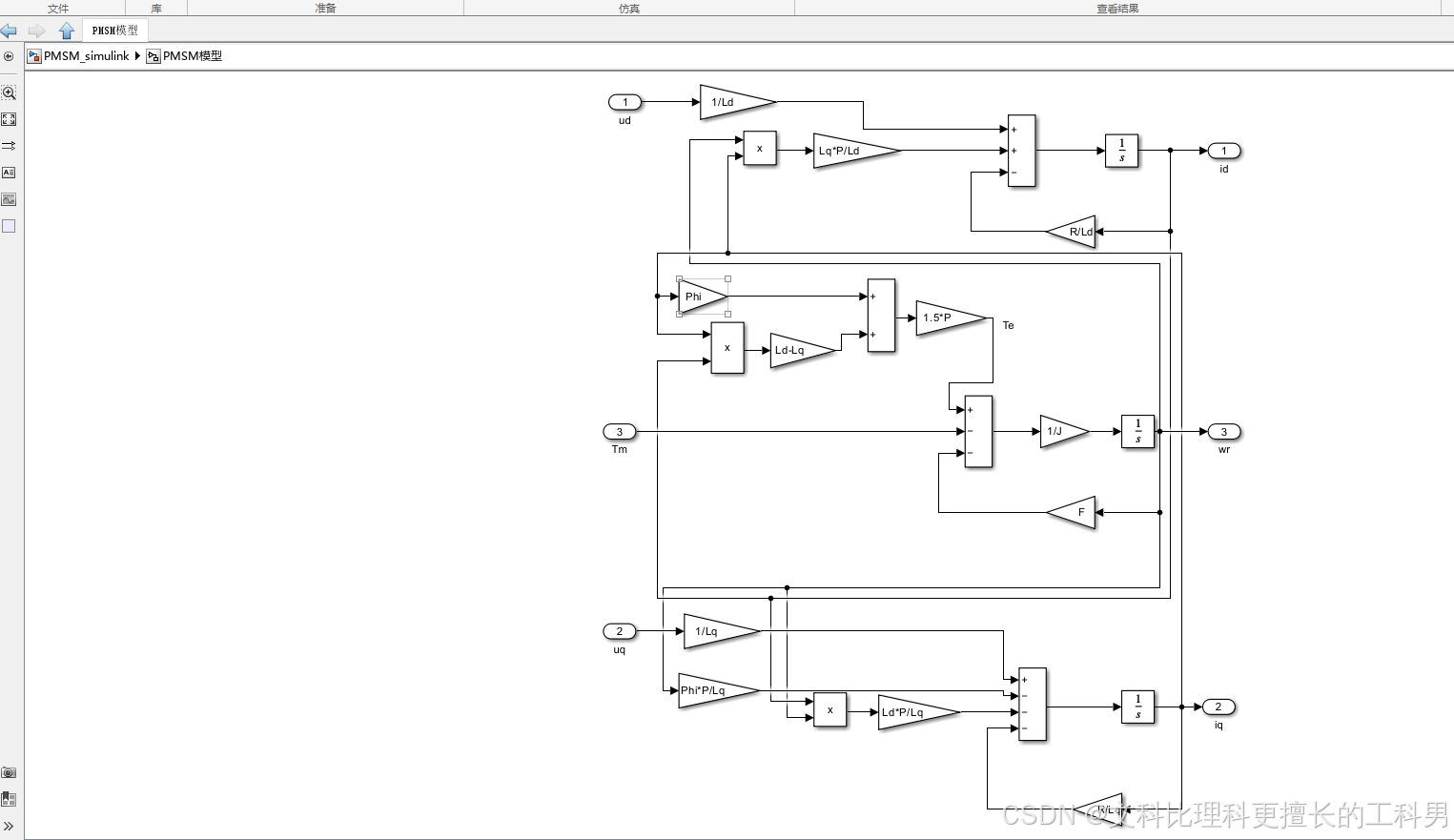
PMSM模块的输入是三个:
Ud:d轴电压
Uq :q轴电压
Tm:机械负载转矩(突加负载)
输出也是三个:
Id:d轴电流
Iq:q轴电流
Wr:转子机械角速度,单位是rad/s(弧度每秒)
对于这个模块的内部其实就是DQ电压方程和电磁转矩方程,在我这这篇博客里做过详细推导
从工程经验角度分析直流无刷电机FOC控制(二)FOC的Clark和Park以及常用方程详细推导_foc三相电流计算位置-CSDN博客
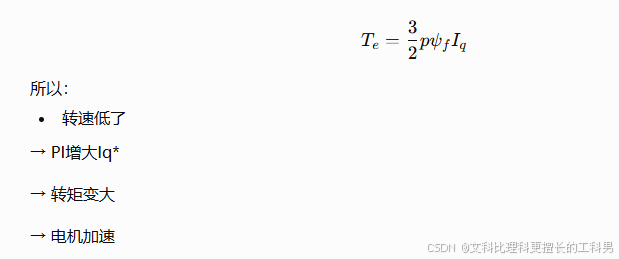
除此之外这个模块的内部还利用了这个关系:
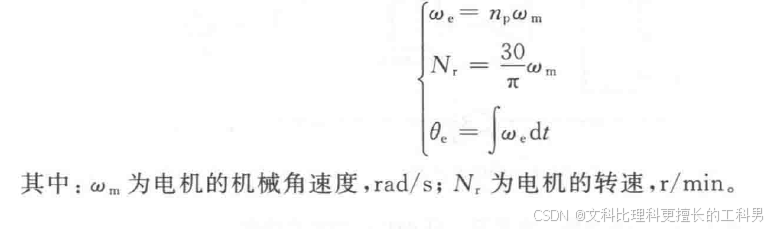
2.3 机械部分
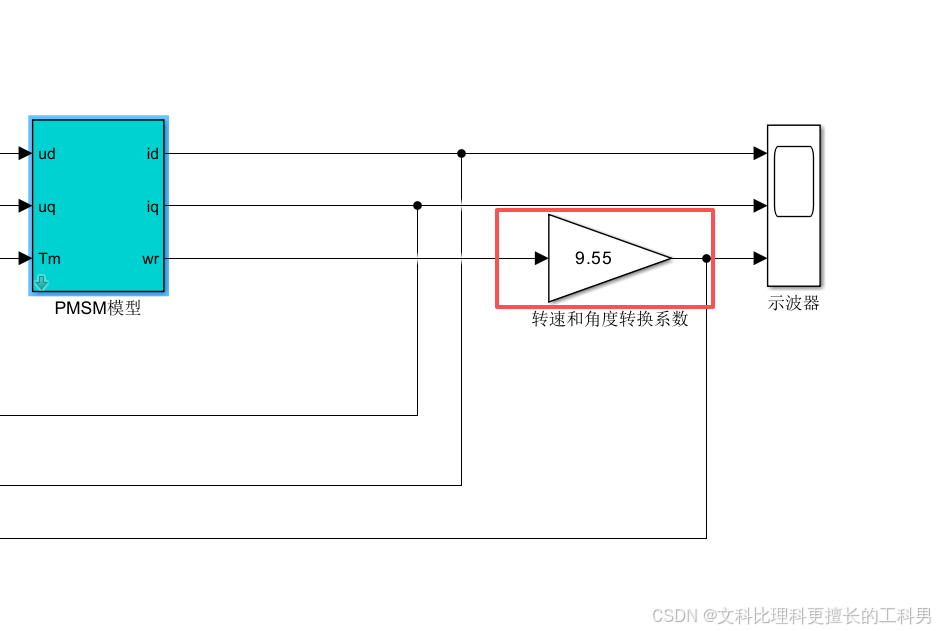
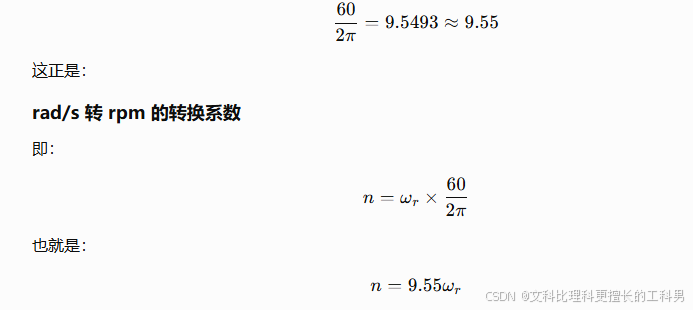
这个模块内部还有一个J和F,其中就是:

这里有个系数是9.55
3.仿真结果分析
3.1 为什么负载转矩是给定阶跃信号而不是其他信号?
那么为什么是加10N.m,就在下图
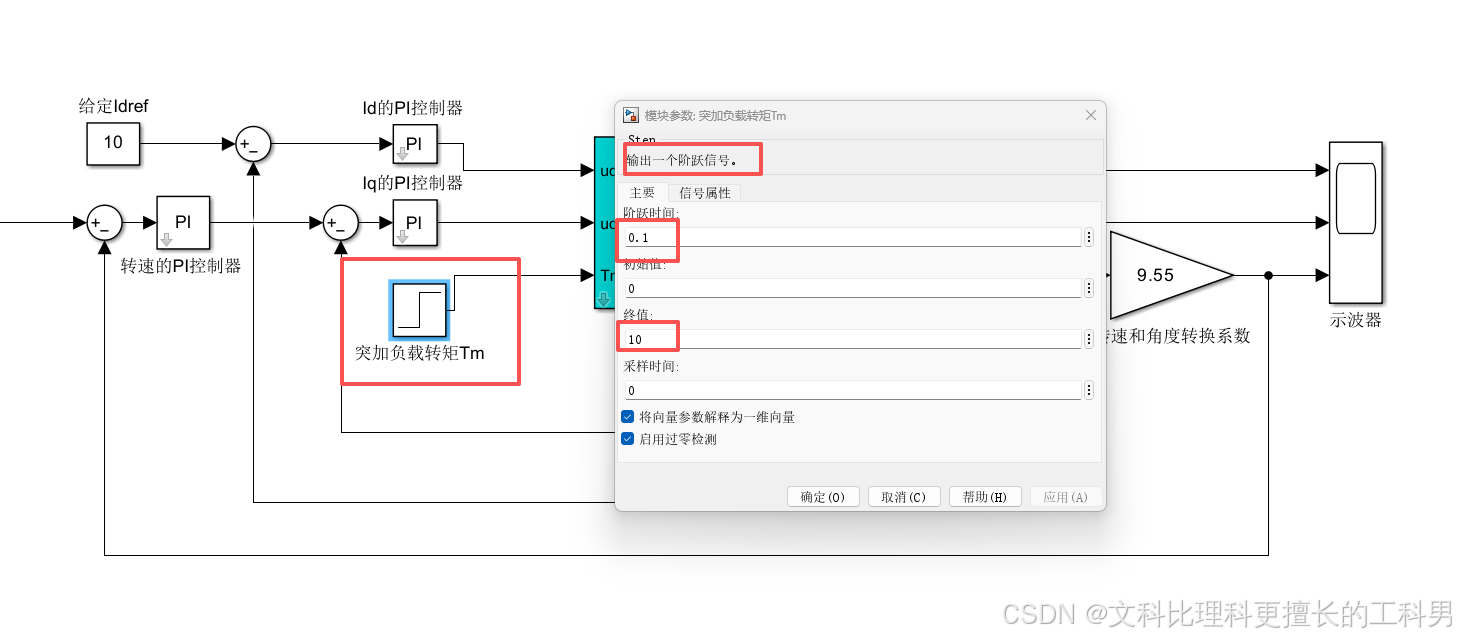
可以看到这个终值就是10,而且是在0.1S处加的,所以就是10N.m
加阶跃信号的目的就是验证速度环+电流环组成的FOC系统,在突然增加负载时,能否把转速重新拉回1500rpm,以及需要多长时间。
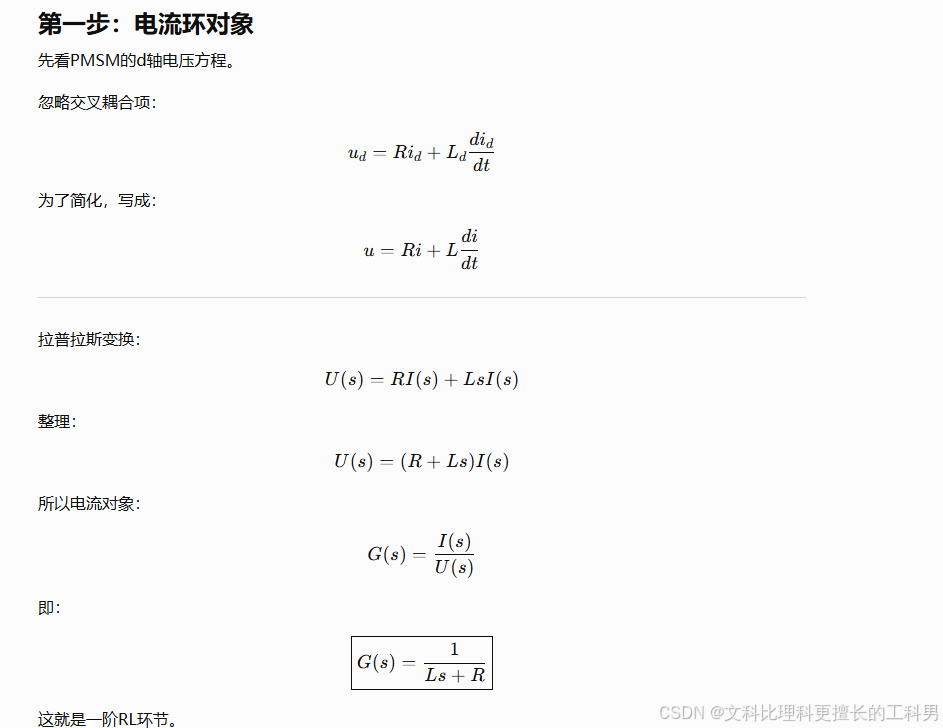
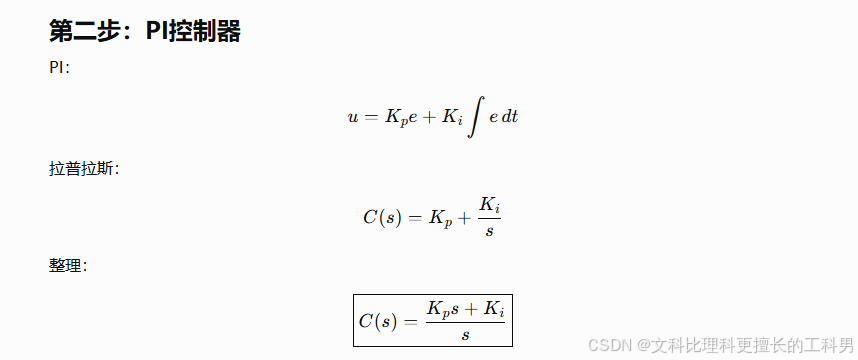
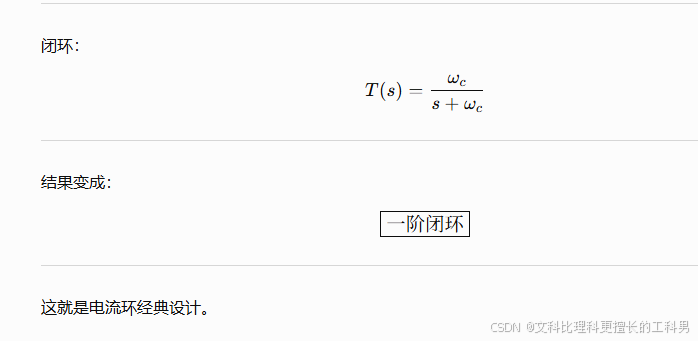
3.2 电机电流环是一阶还是二阶系统?
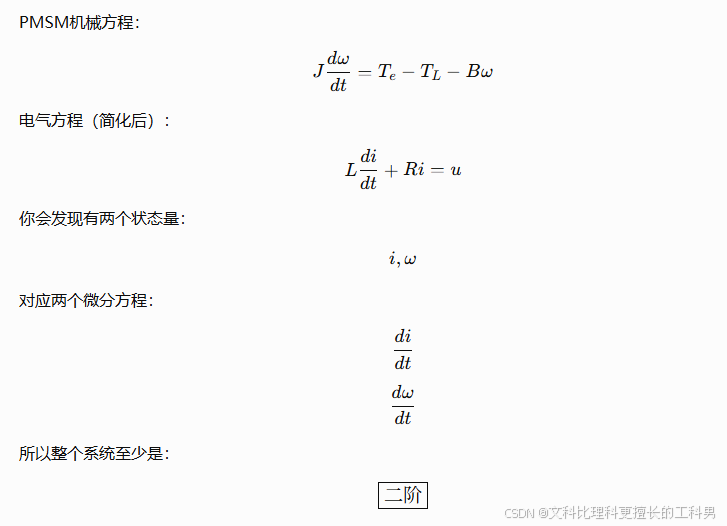


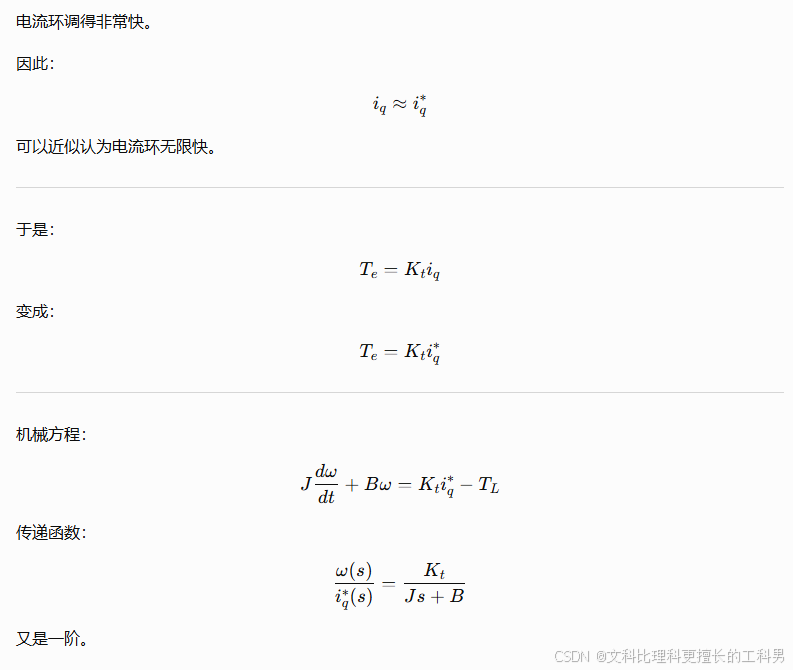
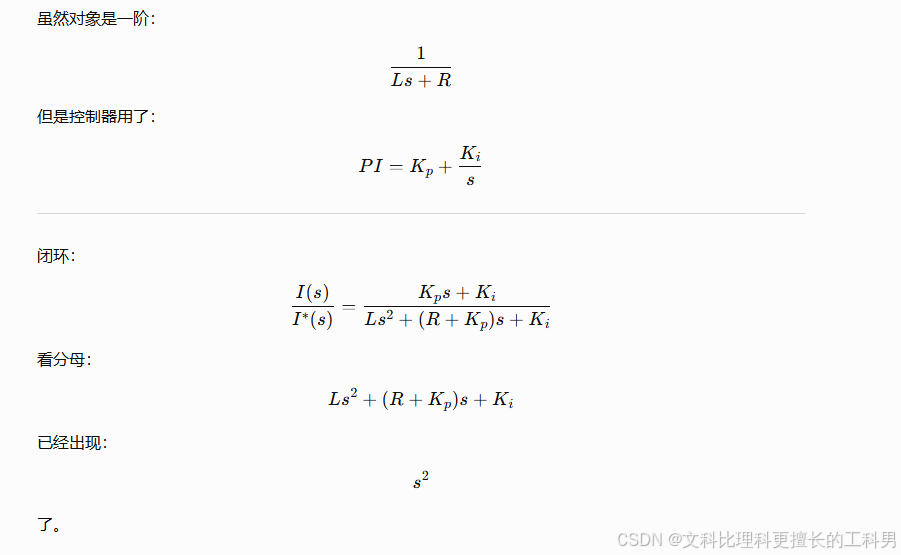

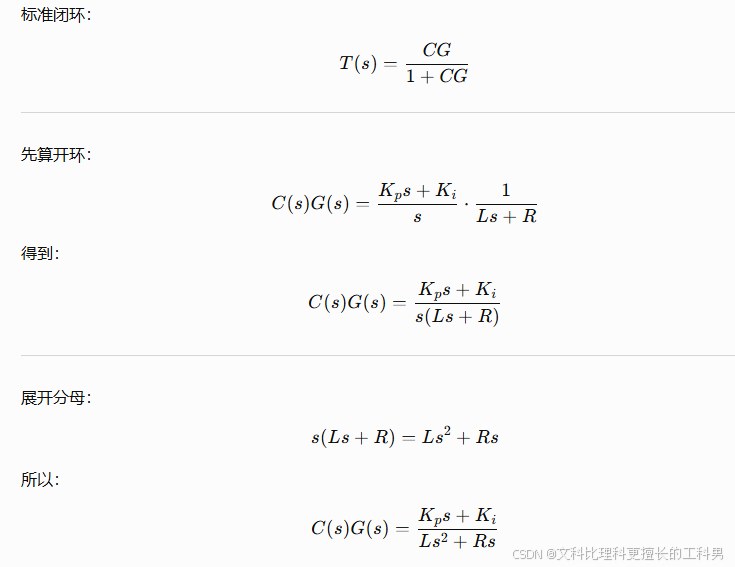
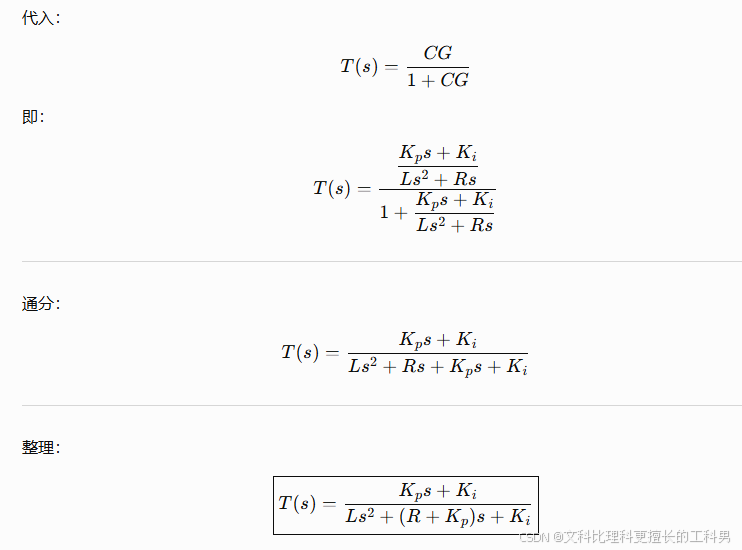
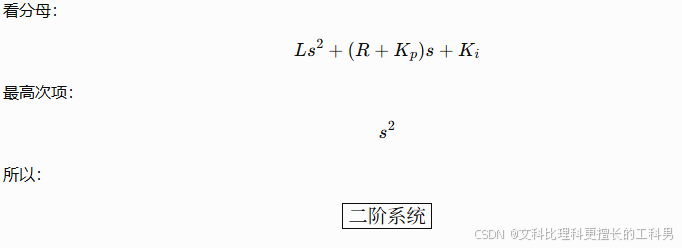
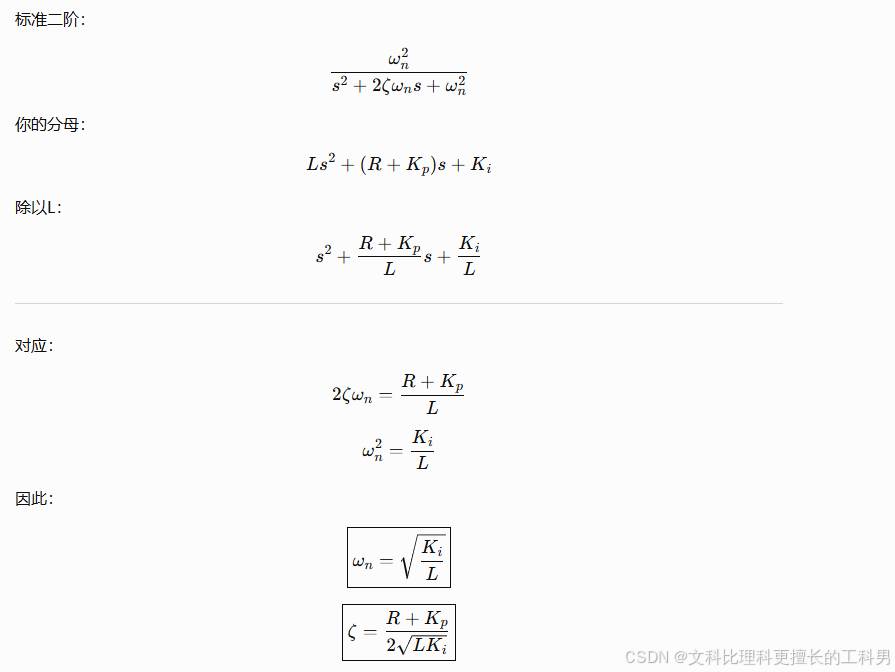
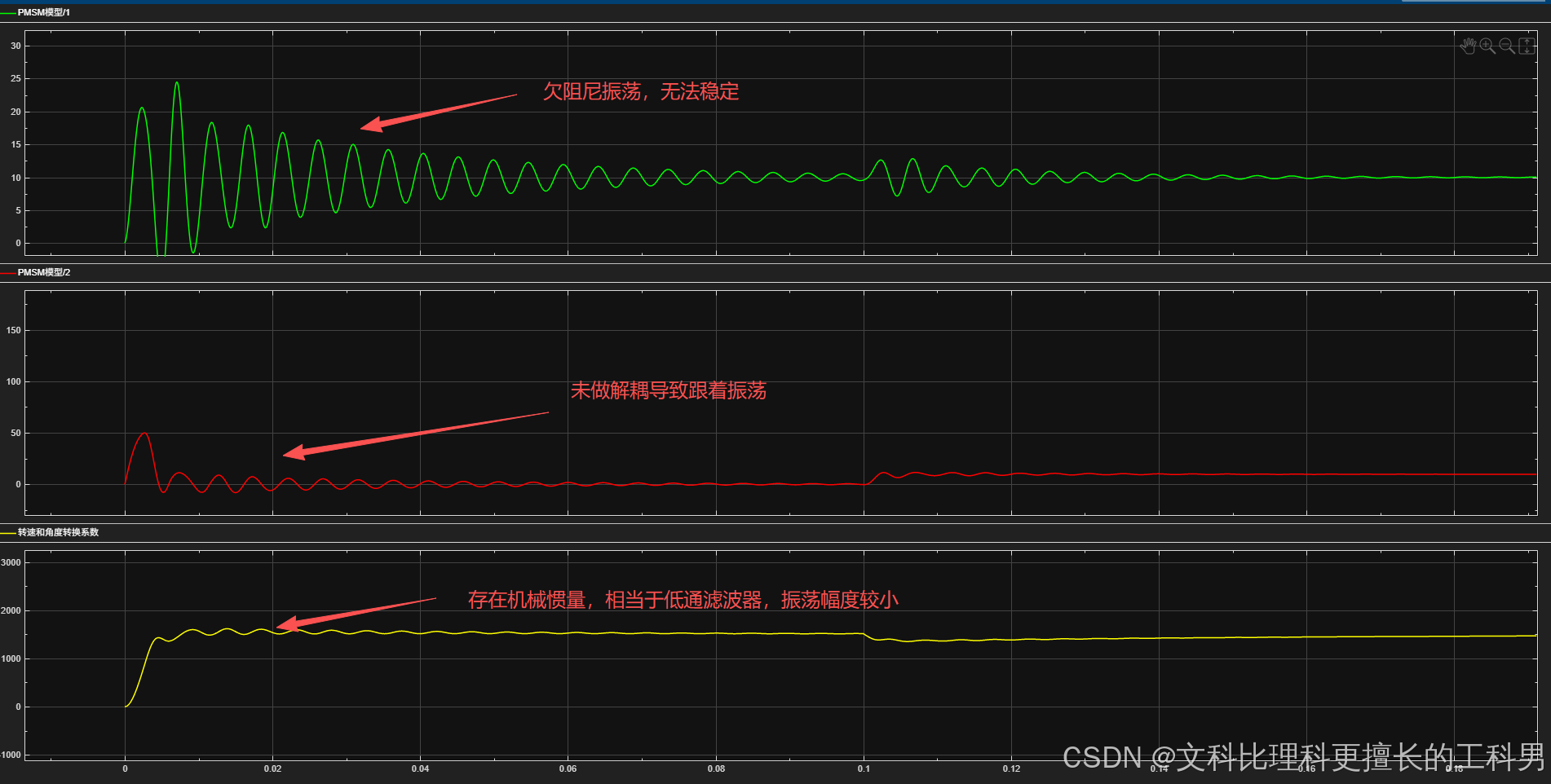
所以会看到Id和iq的波形有一个明显振荡的过程

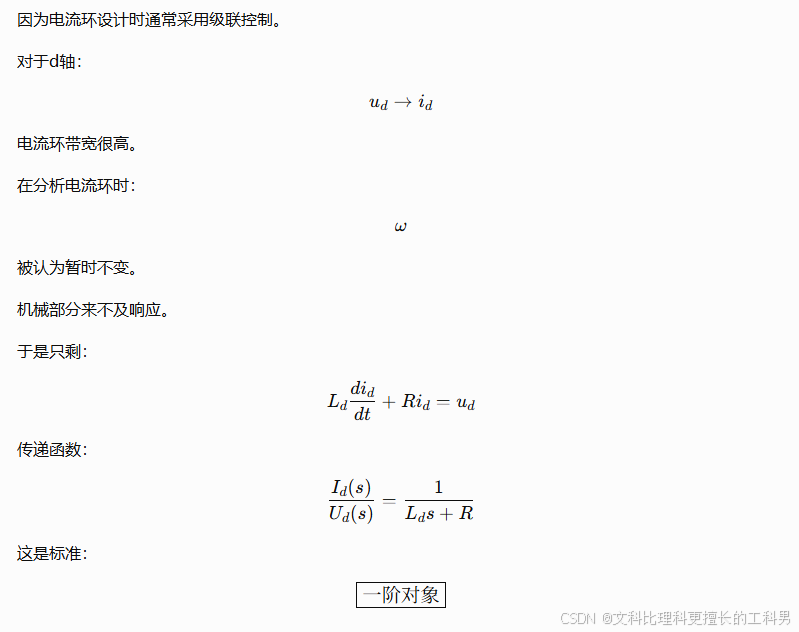
3.3 怎么设计电流环带宽,跟PI参数有关系吗?
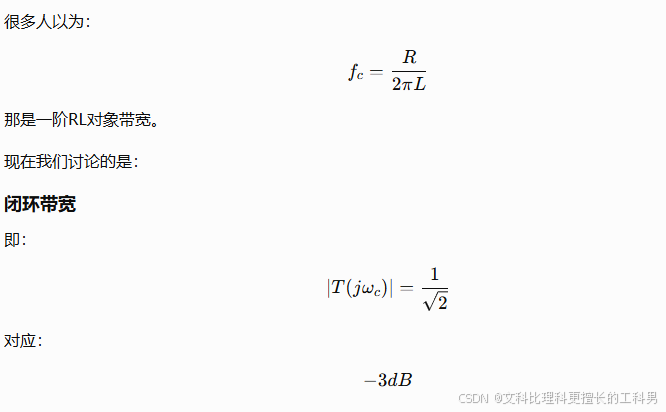
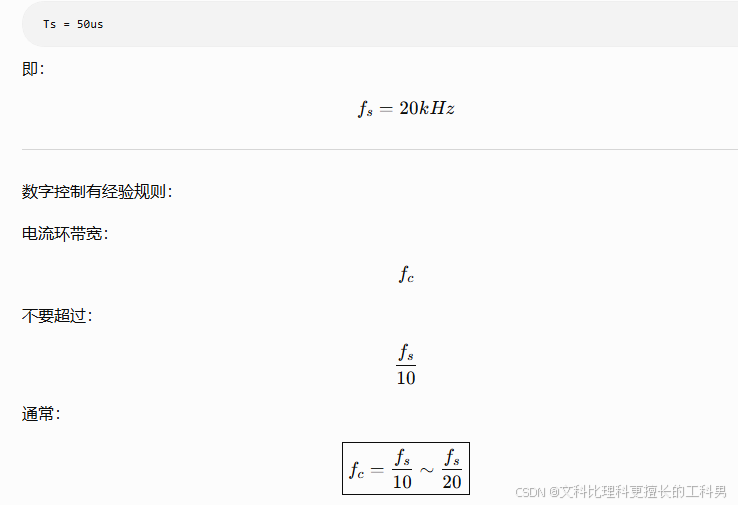
3.3.1 带宽是什么
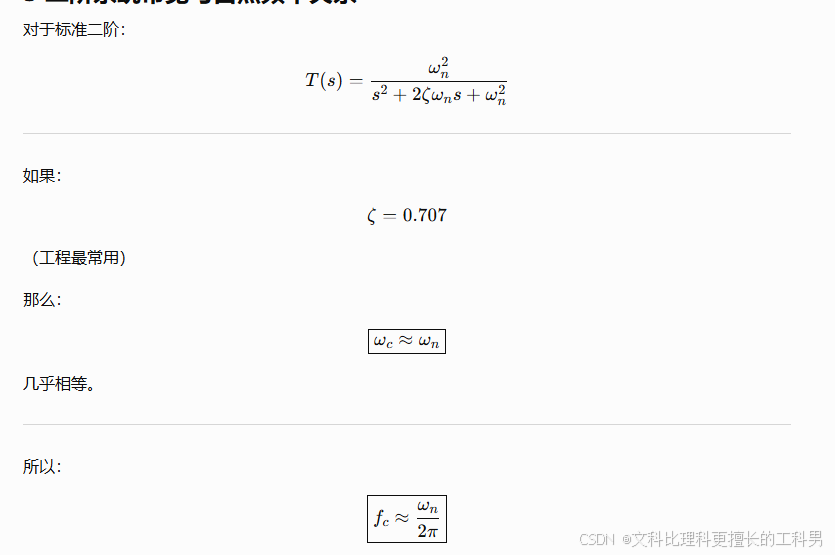
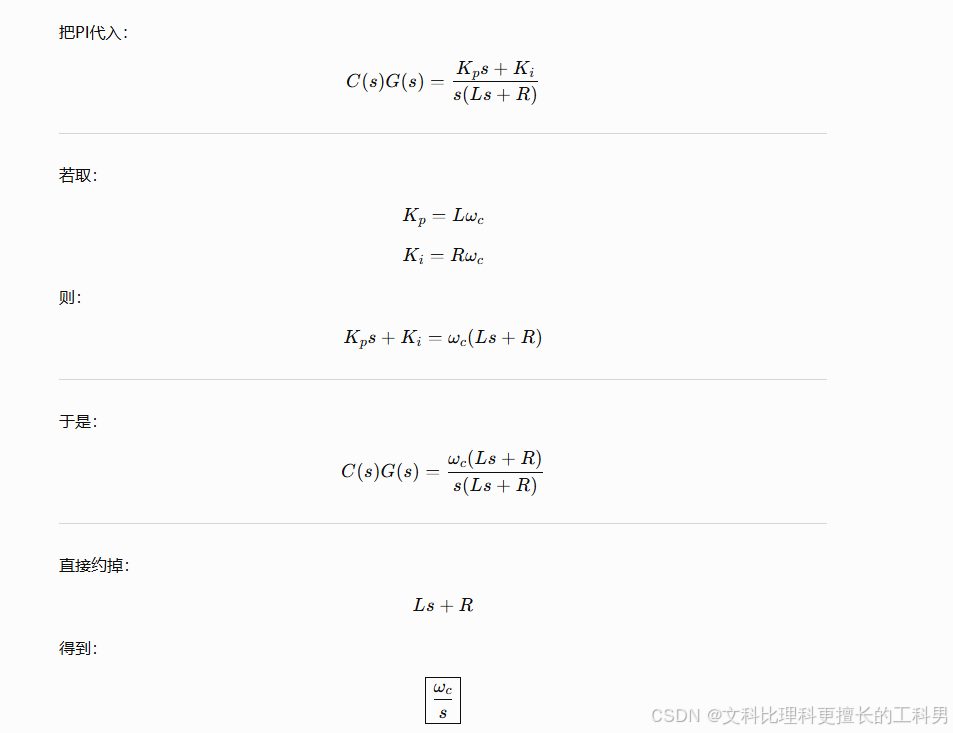
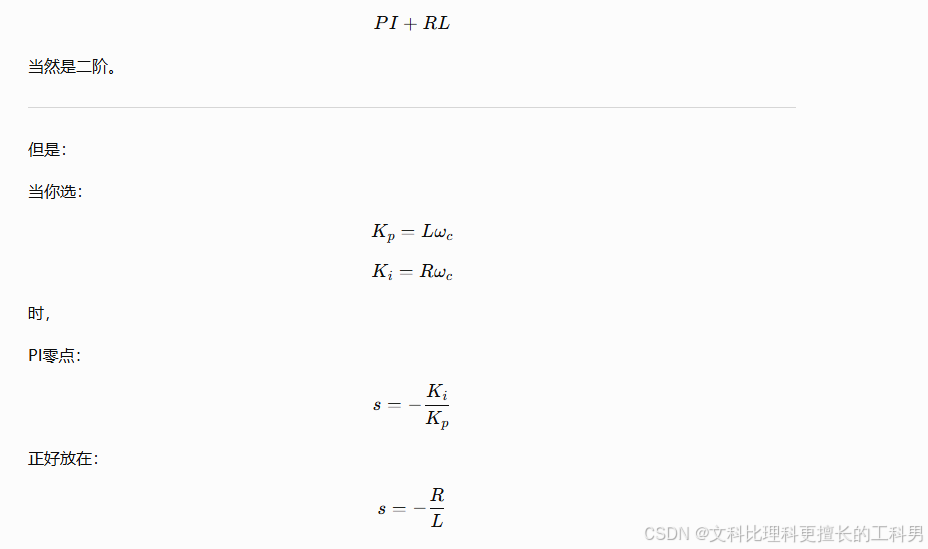
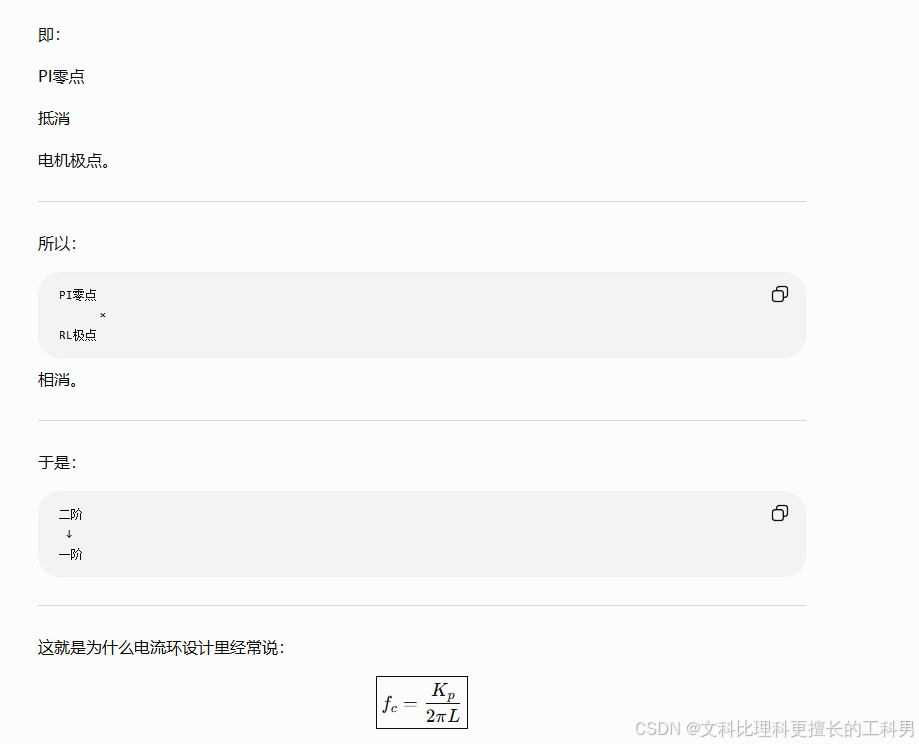

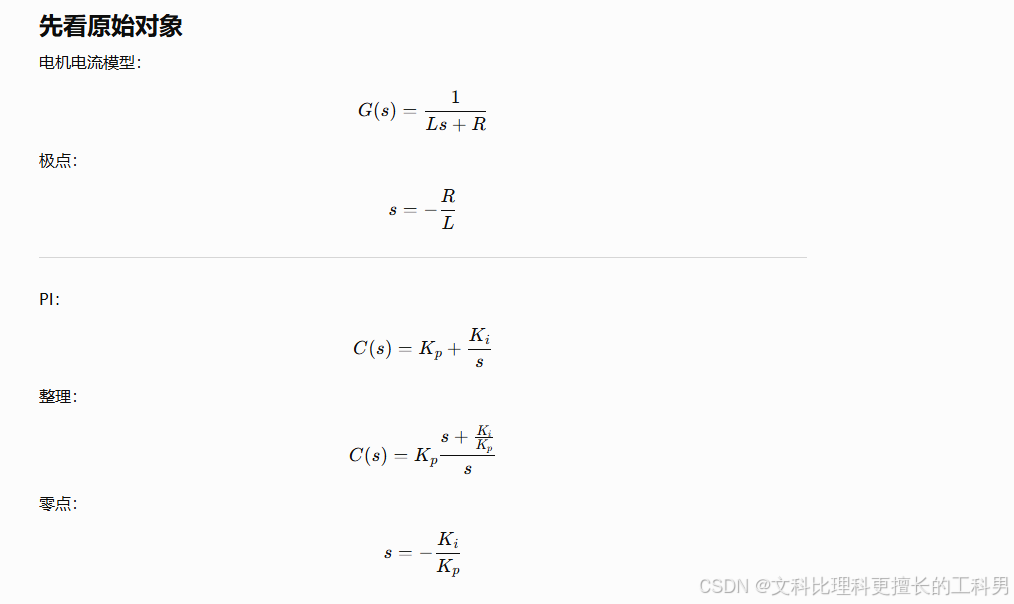
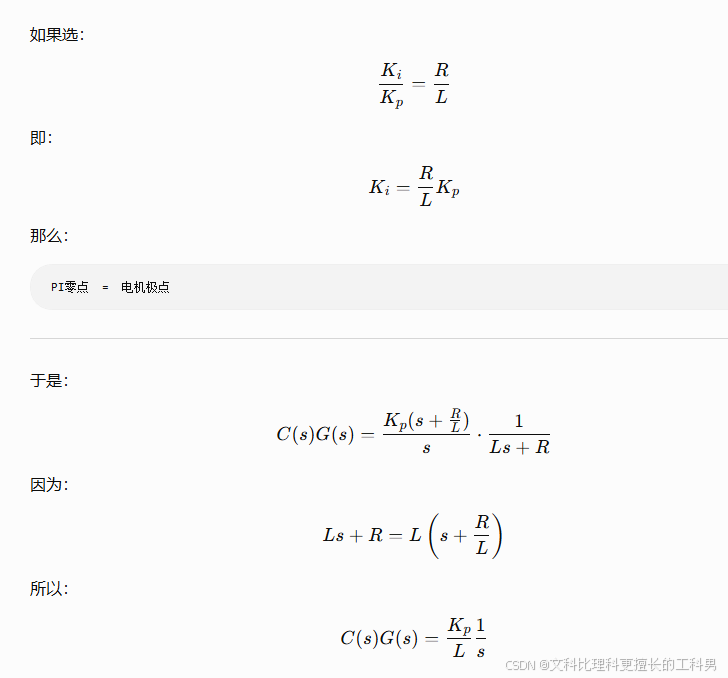
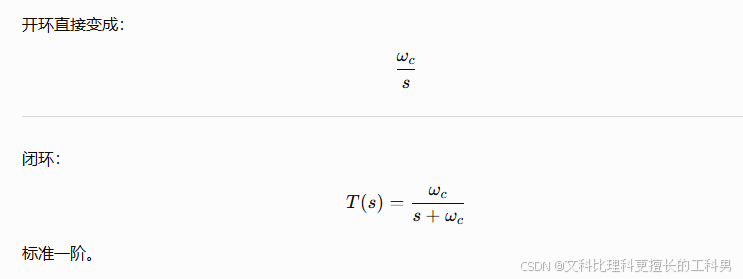

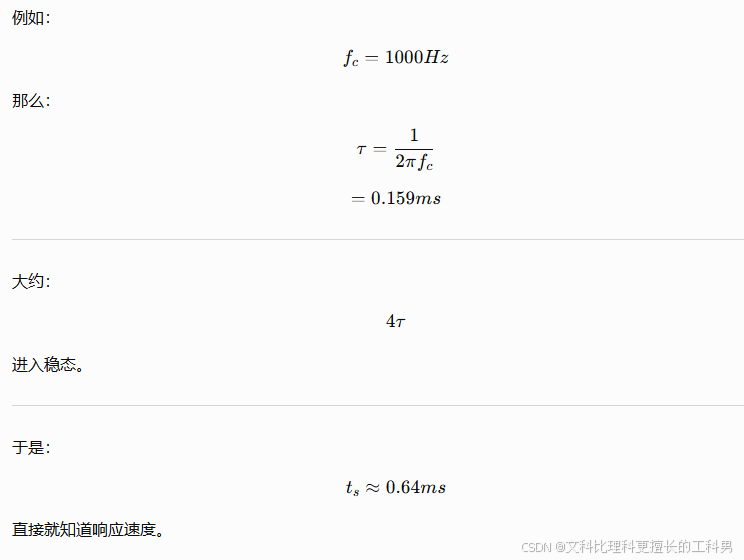
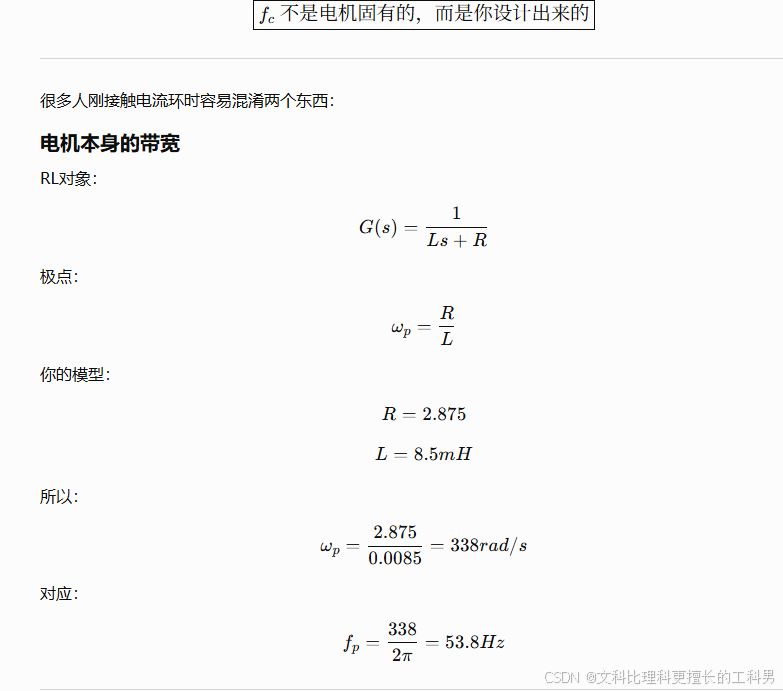
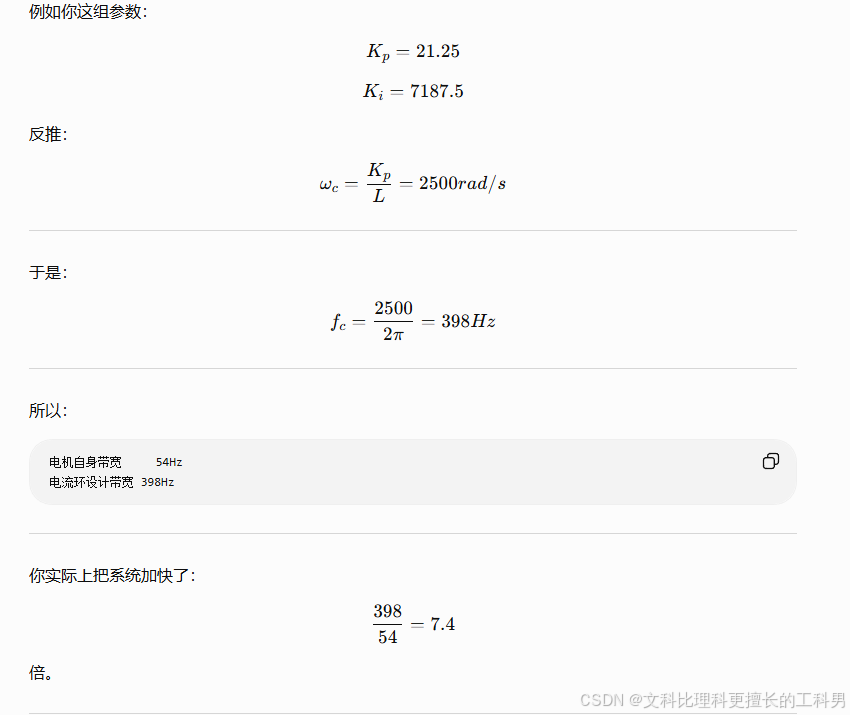
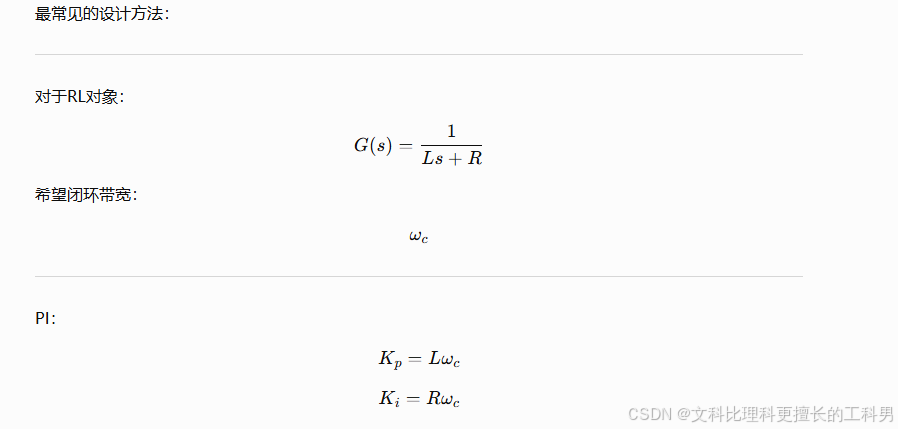
3.3.2 带宽怎么和PI参数对应


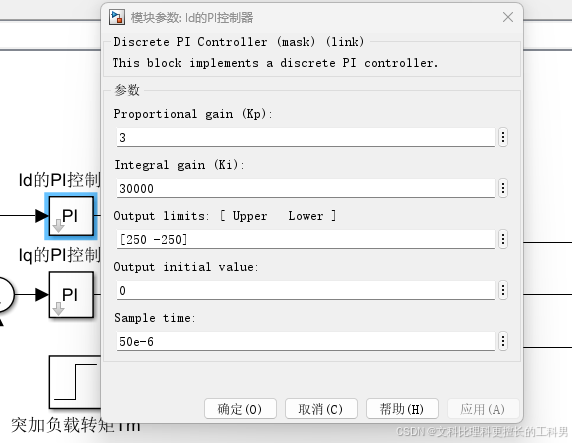
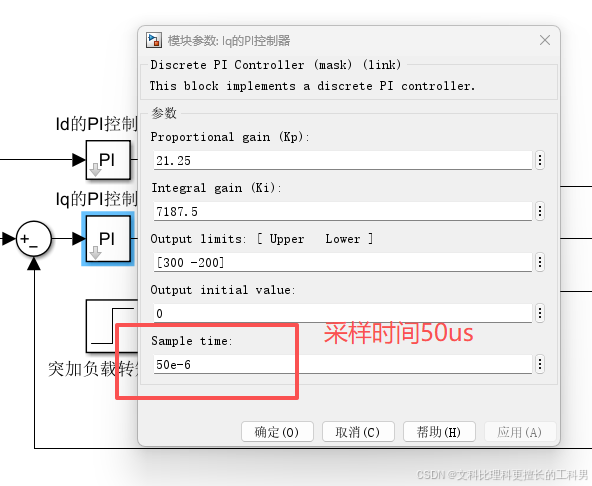
我们的PWM采样频率是20kHz,因为PI控制器的采样时间是50us,

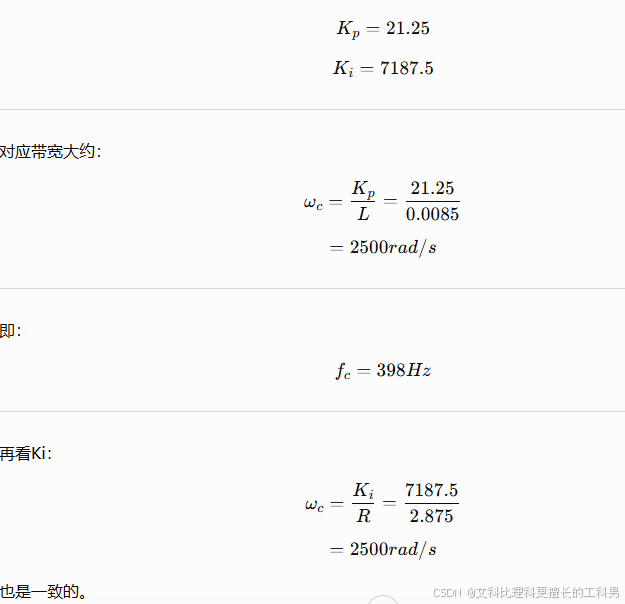
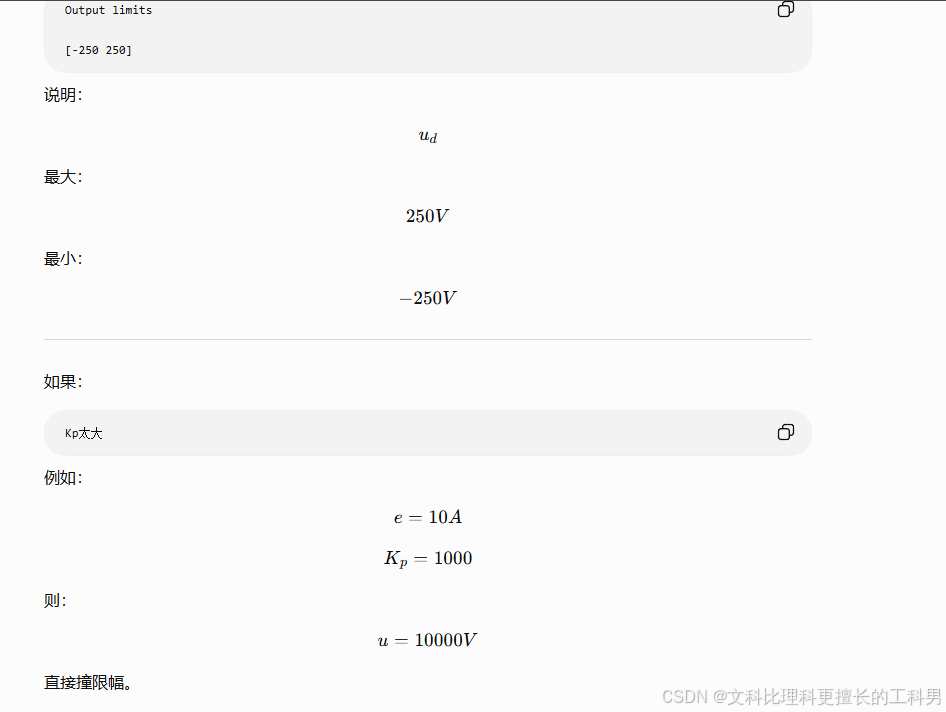
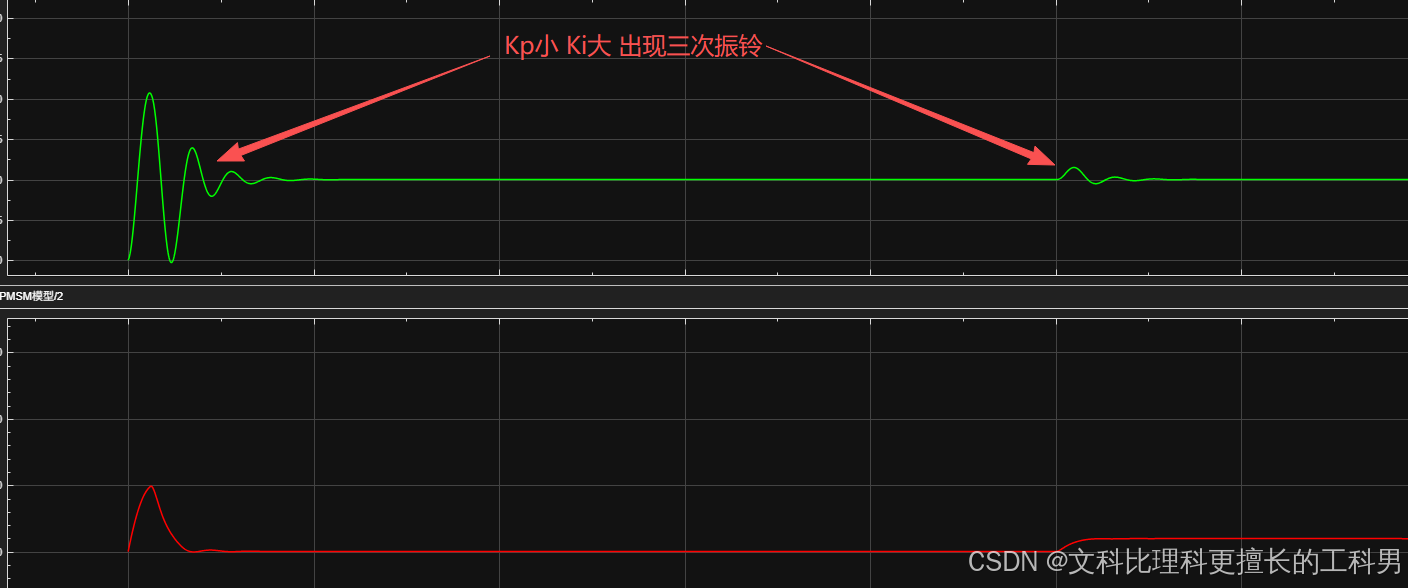
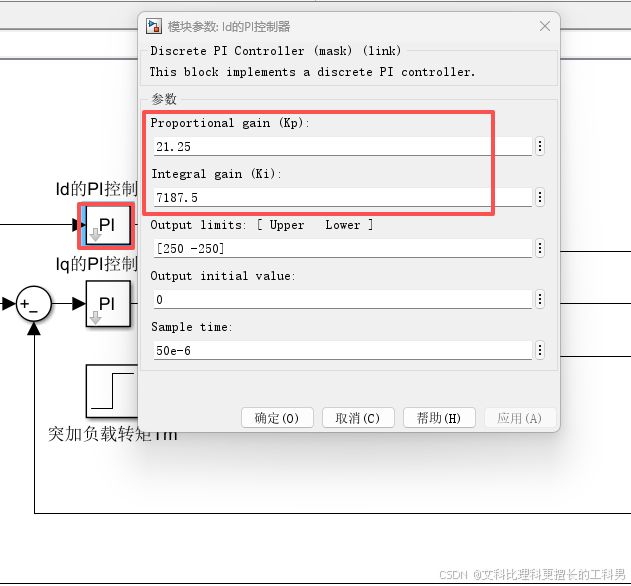
极端的PI参数,两个PI控制器都改成这个参数
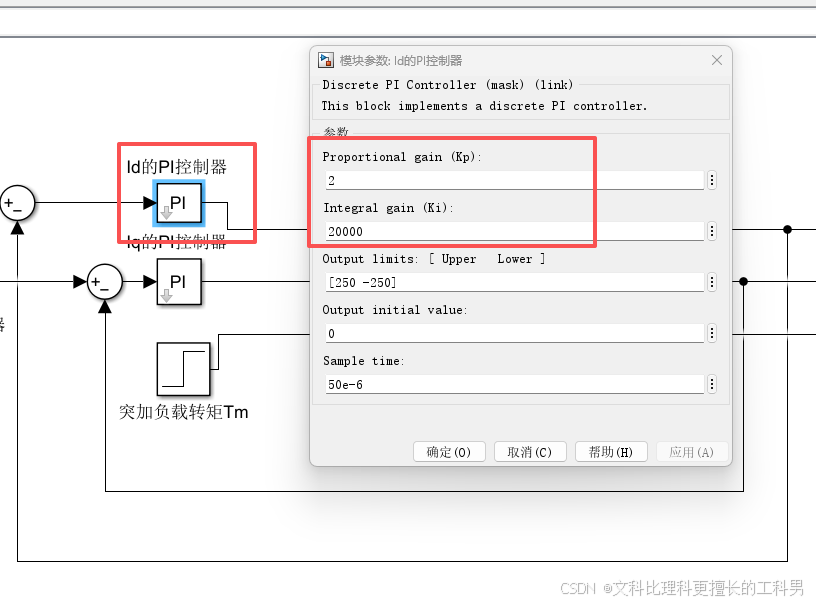
Id的PI控制器改成这个参数,Iq的KP=21.25,KI=7817.5