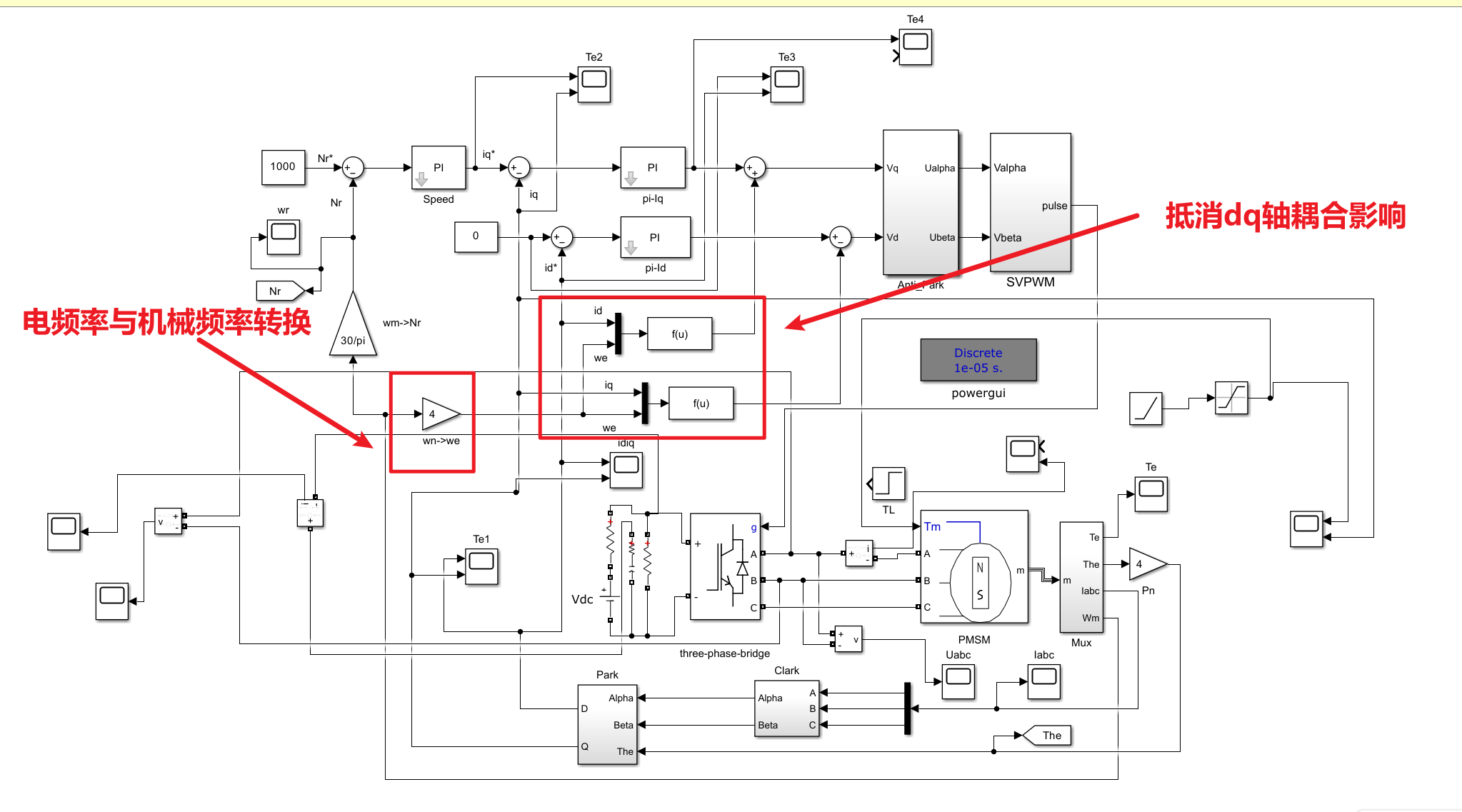
完整d/q轴前馈解耦
一、标准dq电压方程(定子旋转坐标系)
{ud=Rsid+Lddiddt−ωeLqiquq=Rsiq+Lqdiqdt+ωeLdid+ωeψf \begin{cases} u_d = R_s i_d + L_d \dfrac{di_d}{dt} - \omega_e L_q i_q \\ u_q = R_s i_q + L_q \dfrac{di_q}{dt} + \omega_e L_d i_d + \omega_e \psi_f \end{cases} ⎩ ⎨ ⎧ud=Rsid+Lddtdid−ωeLqiquq=Rsiq+Lqdtdiq+ωeLdid+ωeψf
- Rsid、Rsiq+LdidtR_s i_d、R_s i_q + L\dfrac{di}{dt}Rsid、Rsiq+Ldtdi:由电流PI调节器输出
- −ωeLqiq、ωeLdid、ωeψf-\omega_e L_q i_q、\omega_e L_d i_d、\omega_e \psi_f−ωeLqiq、ωeLdid、ωeψf:转速相关耦合扰动,前馈补偿抵消
二、模型加法器规则
- d轴指令电压:Vd∗=PId−前馈dV_d^* = \text{PI}_d - \text{前馈}_dVd∗=PId−前馈d
- q轴指令电压:Vq∗=PIq+前馈qV_q^* = \text{PI}_q + \text{前馈}_qVq∗=PIq+前馈q
1. d轴前馈(减法器输入)
抵消方程内 −ωeLqiq-\omega_e L_q i_q−ωeLqiq
前馈d=ωe⋅Lq⋅iq\text{前馈}_d = \omega_e \cdot L_q \cdot i_q前馈d=ωe⋅Lq⋅iq
- 输入1:iqi_qiq,输入2:ωe\omega_eωe
- 参数:Lq=0.00525 HL_q=0.00525\ \text{H}Lq=0.00525 H
- Fcn表达式:
u(1)*u(2)*0.00525
禁止添加 ωeψf\omega_e\psi_fωeψf,d轴无永磁反电动势
2. q轴前馈(加法器输入)
抵消两项扰动 ωeLdid+ωeψf\omega_e L_d i_d + \omega_e \psi_fωeLdid+ωeψf
前馈q=ωe⋅Ld⋅id+ωe⋅ψf\text{前馈}_q = \omega_e \cdot L_d \cdot i_d + \omega_e \cdot \psi_f前馈q=ωe⋅Ld⋅id+ωe⋅ψf
- 输入1:idi_did,输入2:ωe\omega_eωe
- 参数:Ld=0.0012 H, ψf=0.1827 WbL_d=0.0012\ \text{H},\ \psi_f=0.1827\ \text{Wb}Ld=0.0012 H, ψf=0.1827 Wb
- Fcn表达式:
u(1)*u(2)*0.0012 + u(2)*0.1827
三、前馈作用
- 低转速:ωe\omega_eωe 数值小,前馈影响微弱;
- 中高转速:耦合、反电动势急剧增大,无前馈会导致PI持续顶满电压限幅,输出在±467V来回跳变、电流剧烈震荡;
- 补偿完成后,PI仅处理电流动态误差,输出平滑连续,消除饱和震荡。