浏览器端 3D 看车:从 GLB 到可交互展厅的技术实践
本文基于开源项目 3d-car-viewing,记录如何用 Next.js + React Three Fiber + Three.js 在浏览器中搭建一套可切换车型、可交互部件、可分享深链的 3D 看车体验。重点放在实现过程中的重难点与对应解法,而非 API 罗列。
一、项目概览
1.1 要解决什么问题
传统 2D 图片看车无法展示空间关系;而直接使用第三方 GLB 车模又面临命名混乱、部件合并、无骨骼动画等现实问题。本项目的目标是:
- 在浏览器中加载主流 GLB 车模(SUV / 轿车 / 越野),提供接近展厅的交互体验;
- 对命名不规范、网格合并的模型尽量「能识别多少做多少」,识别不了的按钮明确禁用并提示原因;
- 加载失败时自动回退到内置几何体车模,保证演示不白屏;
- 支持车漆、多机位、场景模式、截图、全屏,以及 URL 深链分享。
1.2 技术栈
| 层级 | 选型 |
|---|---|
| 应用框架 | Next.js 16 · React 19 |
| 3D 渲染 | three.js · @react-three/fiber · @react-three/drei |
| 语言 / 样式 | TypeScript 5 · Tailwind CSS 4 |
1.3 整体架构
状态分层原则:
page.tsx持有所有用户可见状态(车门、灯光、车漆、车型等),通过 props 下发给 Canvas;car-showroom-scene.tsx负责 WebGL 生命周期:GLTF 加载、rig 绑定、每帧动画、相机过渡;- 交互按钮是否可用,由
onAssetRigCapabilities回调上报的 capabilities 决定,避免「点了没反应」。
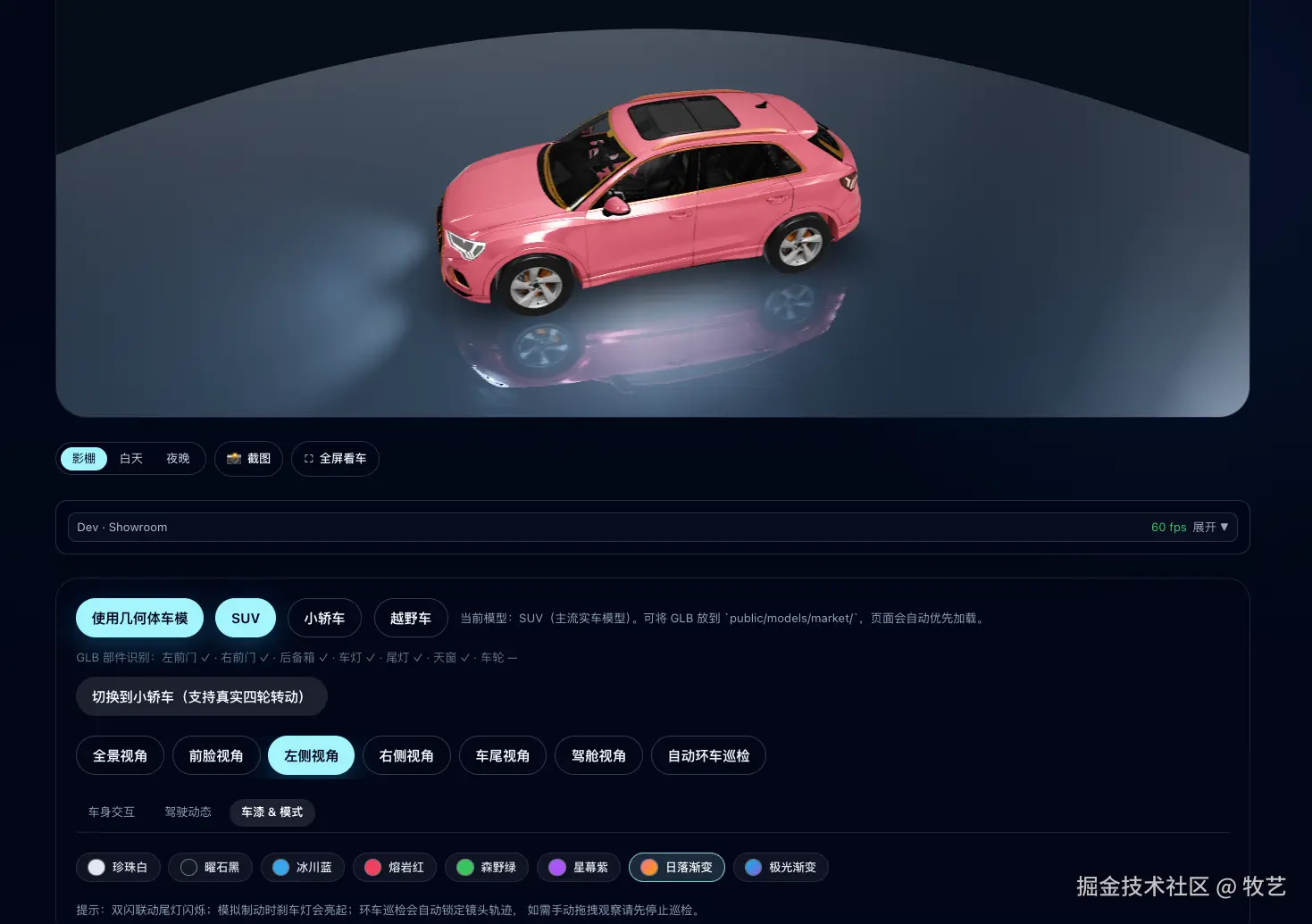
二、效果预览

2.1 主界面 --- 整车 WebGL 展示

2.2 车身交互 --- 车门 / 灯光 / 车漆

2.3 驾驶动态 --- 启动 / 制动 / 环车巡检

2.4 多机位视角

2.5 场景模式切换

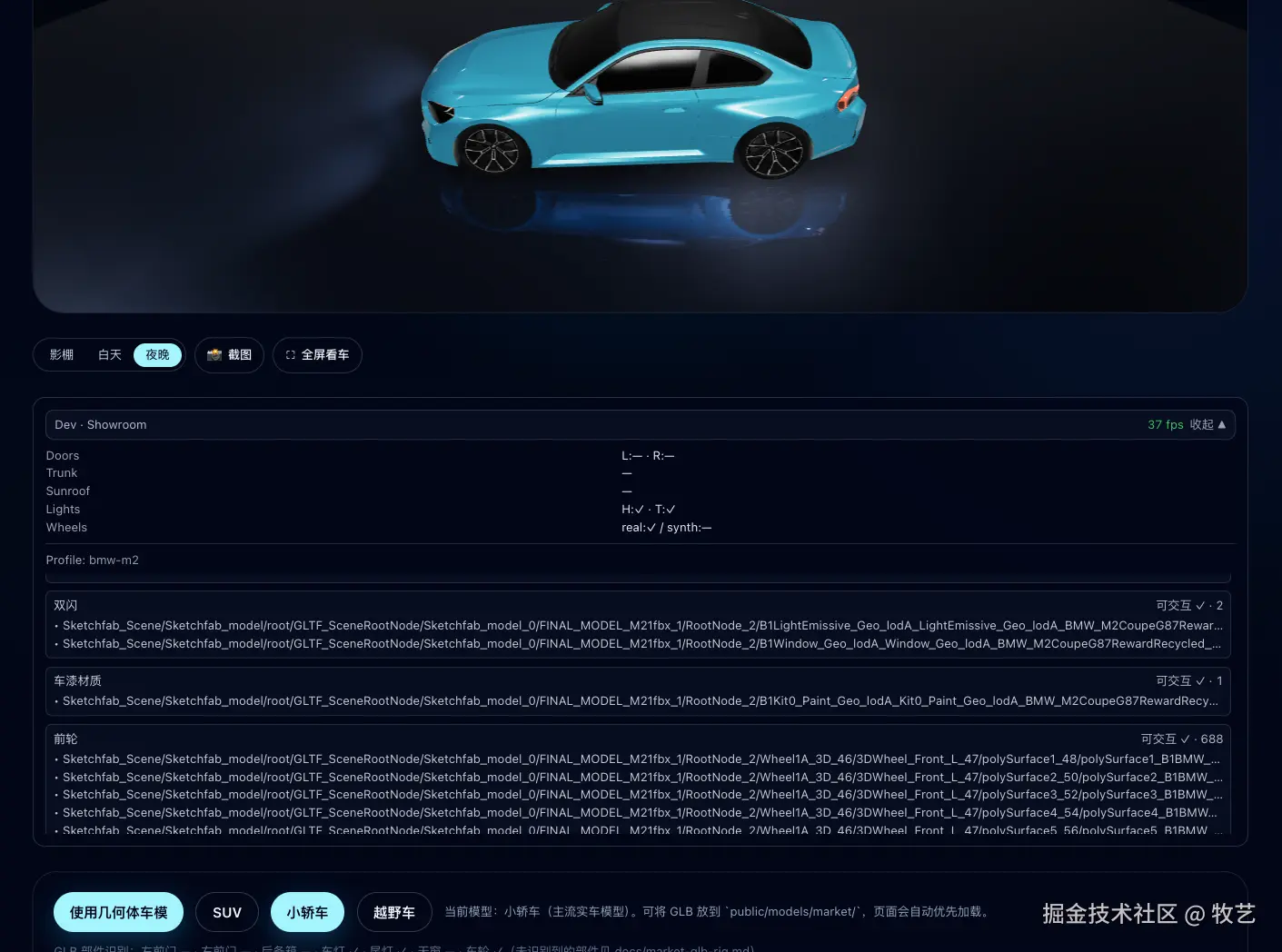
2.6 开发调试 --- GLB 部件识别面板
三、重难点一:第三方 GLB 的「部件 Rig 自动发现」
3.1 难点描述
Sketchfab、Forza 导出等渠道的 GLB 车模没有统一的命名规范 ,也通常不含 glTF 骨骼动画。不同车型的差异极大:
| 车型 | mesh 规模 | 拆分方式 | 实际能力 |
|---|---|---|---|
suv-mainstream.glb(奥迪 Q3) |
~253 | 按部件拆分 | 门 / 后备箱 / 天窗可动;路面四轮与车身合并 |
sedan-mainstream.glb(宝马 M2) |
~1200 | 节点名 Object_*,靠材质识别灯/漆 |
灯发光、改色、怠速振动;门与轮为合并网格 |
offroad-mainstream.glb(Brabus G900) |
~109 | 路面轮焊在车身 | 车灯 / 振动;备胎不转 |
若简单用正则匹配 door 关键字,很容易把横跨半个车身的合并网格误判为车门,旋转时整块车身跟着转------体验灾难。
3.2 解法:启发式发现 + 车型 Profile 覆盖
核心逻辑在 src/lib/asset-car-rig.ts 的 discoverAssetCarRig():
- 遍历所有 Mesh,收集名称、材质名、包围盒中心与尺寸;
- 空间分区:根据整车 AABB 计算前/后、左/右阈值,车门必须落在对应象限;
- 局部面板校验 :
isLocalizedPanel()拒绝 footprint 覆盖大部分车身的 mesh; - 排除规则 :
DOOR_EXCLUDE等正则过滤尾灯、内饰、风挡等误匹配; - Profile 覆盖 :
market-rig-profiles.ts为特定 URL 提供精确正则,弥补自动发现的盲区。
ts
// market-rig-profiles.ts --- 按 URL 匹配车型规则
const suvQ3Profile: MarketRigProfile = {
id: "suv-q3",
urlPattern: /suv-mainstream/i,
leftDoor: [/polySurface5638/i, /Door_Soft_Black_Plastic_Q3/i],
rightDoor: [/polySurface5634/i, /polySurface5632/i],
trunk: [/Boot_ext2_Mesh_049_Carpaint/i, /Boot_ext17/i],
headLight: [/\bHL\d_Mesh/i, /Hl_Projection_lamp/i],
bakedWheels: true, // 路面轮与车身合并,不尝试旋转
};发现完成后输出 AssetCarRig 结构体,包含:
- 车门 / 后备箱的 pivot 组(运行时挂接 mesh);
- 大灯 / 尾灯 / 双闪的 材质引用列表;
- 车漆材质、天窗节点、车轮节点;
capabilities标志位,驱动 UI 按钮启用/禁用。
3.3 交互热区
GLB 模型本身没有可点击的 DOM,因此在 AssetInteractionZones 中为每个 pivot 生成透明 Box 碰撞体 ,绑定 onClick 与 pointer 样式,实现 3D 场景内直接点门开门。
四、重难点二:无 glTF 动画的「伪骨骼」驱动
4.1 难点描述
没有厂商级开门动画时,只能对识别出的 mesh 组做程序化变换。难点在于:
- 车门需要绕铰链旋转,但 GLB 里没有铰链节点;
- 车轮需要原地自转 + 前轮转向,但不能往场景图里塞额外 pivot(会破坏原有层级);
- 发动机启动、制动、双闪需要多通道动画叠加且互不打架。
4.2 解法:Pivot 组 + useFrame 阻尼插值
车门 / 后备箱 :发现阶段将相关 mesh 挂到 THREE.Group pivot 上,设置铰链位置;每帧用 THREE.MathUtils.damp 平滑插值目标角度:
ts
// car-showroom-scene.tsx --- AssetModel useFrame 片段
if (rig.leftDoorPivot) {
const target = state.leftDoorOpen ? -ASSET_DOOR_MAX_OPEN_RADIANS : 0;
rig.leftDoorPivot.rotation.y = THREE.MathUtils.damp(
rig.leftDoorPivot.rotation.y, target, 8, delta,
);
}车轮 :applyWheelMotion() 每帧从 userData.showroomWheel.base 矩阵重建变换,绕自轴滚动、绕转向轴偏转,不引入额外 helper 节点:
ts
// asset-car-rig.ts
export function applyWheelMotion(node, spinAngle, steerAngle) {
// pivot → steer → spin → 还原 base 矩阵
WHEEL_MATRIX.makeTranslation(pivot.x, pivot.y, pivot.z);
if (steerAxis && steerAngle !== 0) {
WHEEL_MATRIX.multiply(WHEEL_ROTATION.makeRotationAxis(steerAxis, steerAngle));
}
WHEEL_MATRIX.multiply(WHEEL_ROTATION.makeRotationAxis(spinAxis, spinAngle));
// ...
WHEEL_MATRIX.decompose(node.position, node.quaternion, node.scale);
}驾驶体感叠加 (同一 useFrame 内):
| 状态 | 表现 |
|---|---|
engineOn |
车身 Y 轴微振(sin(t*8)*0.02) |
| 点火瞬间 | ignitionPulse 抬升 + 俯仰 |
speedKph + braking |
速度阻尼、轮速角速度、制动俯仰 |
hazardOn |
sin(t*8) 方波驱动尾灯闪烁 |
braking |
尾灯额外红色 emissive 叠加 |
4.3 车灯发光:材质 emissive 而非额外 Mesh
大灯 / 尾灯通过 boostShowroomMaterialEmissive() 动态调节材质的 emissive 与 emissiveIntensity,并针对头灯镜片设置 toneMapped: false 以获得 HDR 辉光感。尾灯刻意限制 tailMax,避免高亮度过曝成白色。
五、重难点三:异构 GLB 的统一归一化
5.1 难点描述
不同来源的 GLB 尺度差异巨大(FBX 导出常见 scale=0.01),朝向也不一致(多数 Z 轴朝前,而展厅相机预设假设 -X 为车头)。若不做归一化,切换车型时机位、地面接触、orbit 距离全部失效。
5.2 解法:normalizeMarketModel()
ts
// normalize-market-model.ts 核心步骤
export function normalizeMarketModel(root, targetLength = 4, groundY = -0.22) {
hideHelperMeshes(root); // 隐藏 camera / gizmo 等辅助 mesh
root.position.sub(center); // 几何中心对齐原点
root.scale.multiplyScalar(scale); // 最长轴缩放到 ~4m
root.rotation.y = -Math.PI / 2; // Z-forward → -X-forward
root.position.y += groundY - groundedBounds.min.y; // 轮胎落地
return getVisibleMeshBounds(root);
}关键点:
- 使用世界空间包围盒 (
updateWorldMatrix后计算),正确包含父级 scale; - 先旋转再落地,避免旋转前 AABB 导致的悬浮或穿地;
- 返回的 bounds 供相机、orbit 限制、头灯聚光灯锚点复用。
六、重难点四:自适应相机与环车巡检
6.1 难点描述
六种预设机位(全景 / 前脸 / 侧视 / 车尾 / 驾舱)若写死坐标,换车型后必然构图失调;自动环车巡检又需要在手动 orbit 与程序化路径之间平滑切换。
6.2 解法:包围盒驱动 + 过渡插值
showroom-camera.ts 中 getBoundsCameraPose() 根据 bounds 的 size 与 center 按比例计算机位:
ts
const span = Math.max(size.x, size.y, size.z, 1e-3);
const dist = span * 1.28;
// front: 相机位于 bounds.min.x 前方 dist*0.9 ...CameraRig 在 preset 或 bounds 变化时触发 beginTransitionToPreset(),用 transitionProgressRef 做 ease 插值;开启 autoTour 时改由 sampleAutoTourPose() 沿椭圆轨道采样,带轻微上下起伏。
getOrbitDistanceLimits() 同样基于 span 动态计算 minDistance / maxDistance,保证大小车型都能合理缩放。
七、重难点五:离线 IBL 与多场景氛围
7.1 难点描述
@react-three/drei 的 <Environment preset="city" /> 会从 CDN 拉 HDR,内网 / 离线部署易失败导致画面全黑。同时需要影棚 / 白天 / 夜晚三套差异明显的灯光与地面表现。
7.2 解法:RoomEnvironment + 场景模式配置表
ShowroomImageBasedLighting 使用 Three.js 内置 RoomEnvironment + PMREMGenerator 在本地生成环境贴图,零外部 CDN 依赖。
showroom-scene-modes.ts 将三套模式的背景色、雾效、环境光强度、地面金属度/粗糙度、头灯聚光强度等收敛为 SHOWROOM_SCENE_MODES 配置对象,CarShowroomScene 与 ShowroomReflectiveFloor 统一消费,避免灯光与地板不一致。
夜晚模式配合 MeshReflectorMaterial(@react-three/drei)实现湿地反射;根据 performanceTier 动态降低反射贴图分辨率,兼顾移动端。
八、重难点六:GLB 加载管线与健壮性
8.1 加载流程
8.2 关键工程细节
| 机制 | 作用 |
|---|---|
gltfSceneCache(LRU, limit=6) |
二次切换车型秒开;clone(true) 后重建 rig(Box3 方法在 clone 后会丢失) |
| 切换车型时保留旧模型 | 新资源就绪前旧车仍可见,上层 Html overlay 显示进度 |
MIN_LOADING_OVERLAY_MS = 480 |
本地缓存命中时 overlay 仍短暂展示,避免闪烁 |
| 候选 URL 链式重试 | 主模型 → alternates → fallback,全失败才切几何体 |
dynamic(..., { ssr: false }) |
Canvas 仅客户端挂载,避免 SSR 报错 |
8.3 几何体回退车模
CarModel 用纯 Three.js 几何体拼装整车(车身、车门 pivot、轮毂、内饰等),与 GLB 路径共用同一套 useFrame 动画逻辑。回退时 capabilities 全开,保证演示功能完整。
九、重难点七:URL 深链与 Hydration 安全
9.1 难点描述
希望 ?model=suv&paint=midnight&camera=front&mode=night 可分享、可刷新还原;但 Next.js SSR 首屏不能读 window.location,否则 hydration 不一致。
9.2 解法
ts
// page.tsx --- 客户端 mount 后一次性 hydrate
useEffect(() => {
const initial = readShowroomUrlState();
if (initial.category) setSelectedCategory(initial.category);
// ...
}, []);
// use-showroom-url-state.ts --- 状态变化写回 URL
useEffect(() => {
const params = new URLSearchParams();
params.set("model", state.category);
params.set("paint", state.paintId);
// ...
window.history.replaceState(null, "", nextUrl); // 不污染历史栈
}, [state.category, state.paintId, ...]);replaceState 而非 pushState:用户频繁调色 / 切视角时,浏览器「后退」不会一步步回退每个中间状态。
十、性能优化清单
| 手段 | 位置 | 说明 |
|---|---|---|
AdaptiveDpr / AdaptiveEvents |
Canvas 内 | 帧率下降时自动降 DPR、减少事件频率 |
dpr={[1, 1.75]} |
Canvas props | 限制最大像素比 |
performanceTier 降低 Reflector 分辨率 |
ShowroomReflectiveFloor |
移动端湿地反射降采样 |
| GLTF 内存 LRU | loadGltfScene |
限制缓存车型数量,淘汰时 dispose 几何体与材质 |
preserveDrawingBuffer: true |
Canvas gl 配置 | 截图需保留帧缓冲,略有 GPU 开销 |
| 阴影贴图 1024² | 头灯 SpotLight | 平衡质量与性能 |
十一、扩展指南
11.1 接入新车型
- 将 GLB 放入
public/models/market/; - 在
src/lib/car-categories.ts注册 URL; - 用 gltf.report 或 Blender 查看 mesh / 材质命名;
- 若自动发现不准,在
market-rig-profiles.ts增加MarketRigProfile; - 刷新页面,开发环境下检查 Debug 面板的部件识别结果。
详细命名约定见 market-glb-rig.md。
11.2 新增交互能力
- 在
asset-car-rig.ts扩展AssetCarRig与discoverAssetCarRig扫描逻辑; - 在
AssetModel的useFrame中驱动动画; - 在
page.tsx增加状态字段与按钮,通过supportsInteraction()门控。
十二、已知限制与取舍
- 无 glTF 动画的模型只能做近似开合,无法达到 CAD 级精度;
- 合并网格的车身(如宝马 M2 车门)无法拆分,按钮会禁用------这是模型结构限制,不是代码 bug;
- 车身喷漆 只改
paintMaterials,不会影响灯罩玻璃材质; - 仓库内 GLB 体积约 120MB,首次 clone 较慢;生产环境建议 CDN + 压缩纹理;
- 截图功能依赖
preserveDrawingBuffer,极高分辨率下移动端可能 OOM。
十三、总结
本项目的核心工程价值在于:用一套可扩展的 Rig 发现层,把不可控的第三方 GLB 翻译成可控的交互能力,并在发现失败时优雅降级。技术路径可归纳为:
markdown
GLB 加载 → 归一化 → Rig 发现(启发式 + Profile)→ capabilities 上报
→ useFrame 多通道动画 → 包围盒驱动相机 → 离线 IBL 场景
→ URL 深链分享 → 性能自适应如果你正在做类似的 3D 商品展示、房产漫游或工业可视化,这套「发现层 + 降级层 + 配置层」的分层思路可以直接复用;差异主要在 Profile 规则与动画表现,而不在 R3F 基础搭建。
附录:关键文件索引
| 文件 | 职责 |
|---|---|
src/app/page.tsx |
页面状态、交互 UI、URL hydrate |
src/components/car-showroom-scene.tsx |
Canvas、GLTF 加载、AssetModel / CarModel |
src/lib/asset-car-rig.ts |
部件自动发现、车轮运动、灯光 emissive |
src/lib/market-rig-profiles.ts |
车型级正则覆盖 |
src/lib/normalize-market-model.ts |
GLB 缩放 / 朝向 / 落地 |
src/lib/showroom-camera.ts |
机位 / 环车 / orbit 限制 |
src/lib/showroom-scene-modes.ts |
影棚 / 白天 / 夜晚配置 |
src/components/showroom-environment.tsx |
IBL、地面反射、头灯聚光 |
src/lib/use-showroom-url-state.ts |
深链读写 |
docs/ARCHITECTURE.md |
贡献者向架构说明 |
docs/market-glb-rig.md |
GLB 建模与命名要求 |
项目地址
| 项 | 链接 |
|---|---|
| GitHub 仓库 | github.com/jiaxiantao/... |
| Clone 地址 | https://github.com/jiaxiantao/3d-car-viewing.git |
| Issue / 讨论 | github.com/jiaxiantao/... |
参考文章
| 主题 | 标题 | 链接 |
|---|---|---|
| Three.js 官方手册 | Three.js Manual | threejs.org/manual/ |
| React Three Fiber | R3F 文档(Getting Started / API) | docs.pmnd.rs/react-three... |
| drei 辅助库 | @react-three/drei 文档与示例 | github.com/pmndrs/drei |
| glTF 规范 | Khronos glTF 2.0 Specification | registry.khronos.org/glTF/specs/... |
| GLB 调试 | gltf.report --- 在线查看 mesh / 材质结构 | gltf.report/ |
| 环境光照 | Three.js RoomEnvironment 示例(PMREM / IBL) | threejs.org/docs/#examp... |
| Next.js | Next.js App Router 文档 | nextjs.org/docs/app |
| 性能 | R3F Performance pitfalls | docs.pmnd.rs/react-three... |
参考书籍
| 书名 | 作者 | 说明 |
|---|---|---|
| Discover Three.js | Jos Dirksen | 面向 Web 的 Three.js 入门与进阶,涵盖场景图、光照、加载与动画;在线免费阅读 |
| Real-Time 3D Graphics with WebGL 2(第 2 版) | Faruna, Lipchak, et al. | WebGL 2 与实时渲染管线,适合理解 PBR、阴影、后处理等底层概念 |
| Fundamentals of Computer Graphics(第 5 版) | Marschner, Shirley | 计算机图形学经典教材,相机、变换、光照模型等理论基础 |
| Interactive Computer Graphics: A Top-Down Approach with WebGL(第 8 版) | Angel, Shreiner | 以 WebGL 为载体的交互式图形学课程用书,与 Three.js 抽象层互补 |
| WebGL Insights | Patrick Cozzi (ed.) | WebGL 工程实践合集,含性能优化、资源管理与渲染技巧 |