在 ABB 工业机器人应用中,机器人安装夹爪、吸盘、焊枪等工具后,需要创建对应的 ToolData(工具数据) ,并通过 测量偏离点 标定工具中心点(TCP),保证机器人运动精度。
本文介绍 ToolData 的创建方法以及测量偏离点的操作流程。
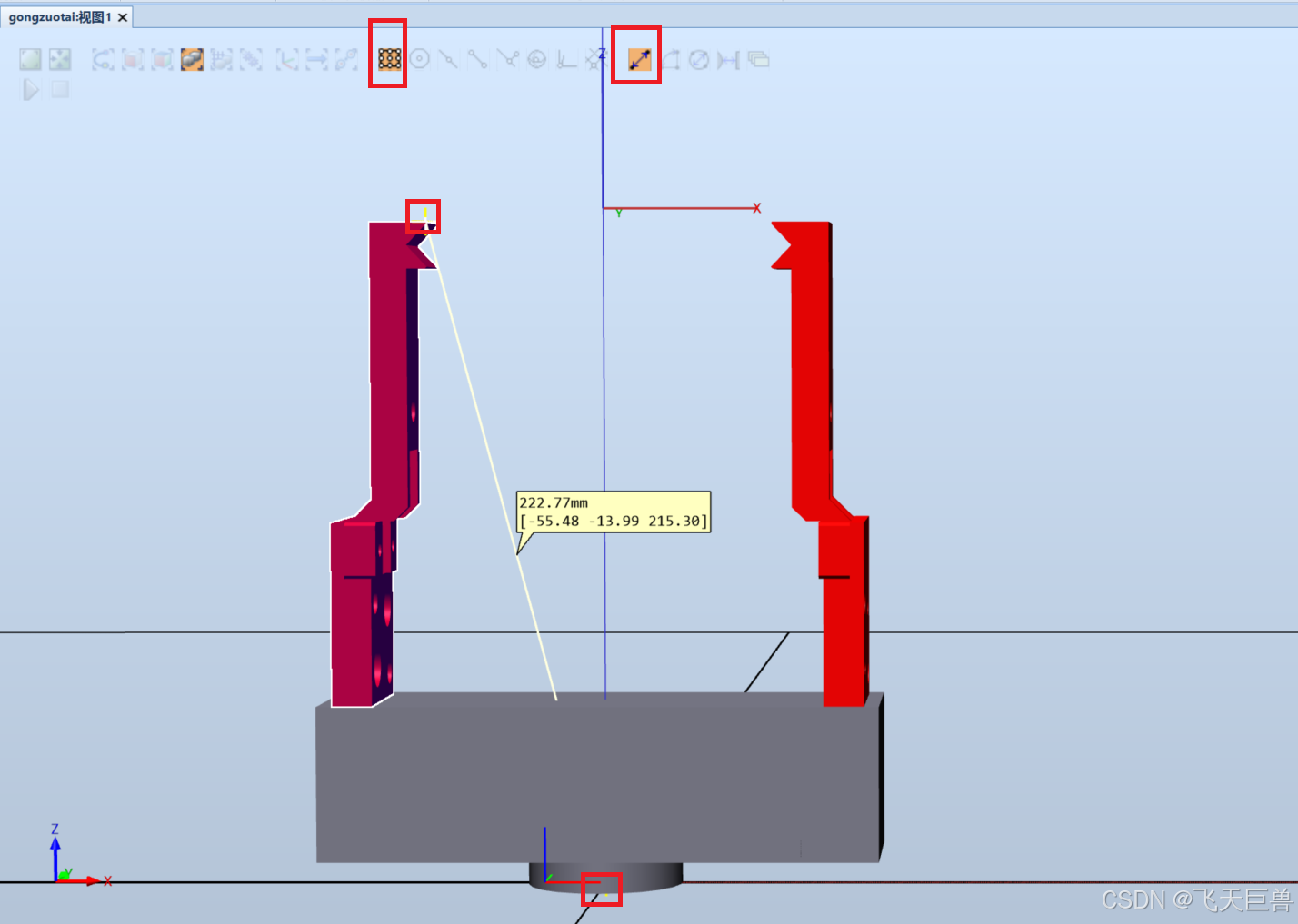
测量偏离点
可以得出z轴215
创建工具数据(ToolData)
ToolData 用于保存工具的安装信息,包括工具位置、姿态以及质量等参数。机器人运动时,会以 ToolData 作为工具坐标系进行轨迹计算。
操作步骤
-
点击 手动操纵(Jogging)。
-
将坐标系切换为 工具坐标(Tool)。
-
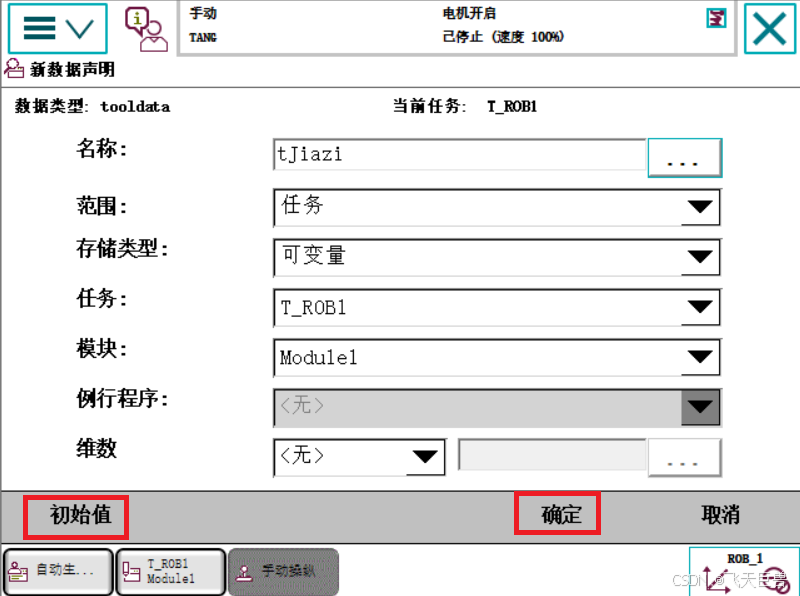
点击 新建工具数据(ToolData)。
-
输入工具名称,例如 tool1。
-
根据实际工具填写相关参数。
-
点击 确定,完成 ToolData 创建。
配图建议: 插入"手动操纵 → 工具坐标 → 新建工具数据"界面截图。
ToolData 参数说明
创建 ToolData 时,常见参数如下:
| 参数 | 说明 |
|---|---|
| Robhold | 工具是否安装在机器人末端,一般选择 TRUE |
| X、Y、Z | 工具中心点(TCP)相对于机器人法兰的位置 |
| rot:q1、q2、q3、q4 | 工具姿态(四元数),表示工具方向 |
| Mass | 工具质量(kg) |
| cog | 工具重心的位置,相对于法兰坐标系或 TCP。 如果重心设置错误,机器人在高速运行时可能出现振动, 定位误差,运行不平稳 |
说明:
X、Y、Z 与 q1、q2、q3、q4 共同组成工具中心点(TCP)的位姿。
注意事项
-
ToolData 创建完成后,建议立即进行 TCP 标定。
-
工具安装位置发生变化时,需要重新测量偏离点。
-
TCP 标定越准确,机器人定位精度越高。
-
标定完成后,可切换到工具坐标,验证工具尖端是否始终保持在同一点。
测试工具数据
完成 ToolData 创建和 TCP 标定后,建议进行测试,验证**工具坐标(说明tfram是正确的)**是否正确。
操作步骤
-
点击 手动操纵。
-
动作模式 选择 重定位(Reorient)。
-
坐标系 选择 工具(Tool)。
-
工具坐标 选择刚刚创建的 ToolData。
-
操作摇杆,使机器人进行姿态旋转。
测试结果
如果 ToolData 标定正确:
-
工具尖端(TCP)基本保持在同一点。
-
工具仅改变姿态,不会产生明显位移。
如果 ToolData 标定不准确:
-
工具尖端会出现明显偏移。
-
旋转过程中会画圆或发生晃动。
-
需要重新进行 测量偏离点 标定。
其他
修改程序中的工具数据,将 tool0工具替换为 tJiazi。
- 选中该行代码中的 tool0,修改为 tJiazi。
- 点击手动操作 --- 工具坐标 ,选择 tJiazi。
- 选中该行代码,点击修改位置
小结
ToolData 是机器人识别工具的重要数据,包含工具的位置、姿态和质量等信息;而 测量偏离点 是标定工具中心点(TCP)的常用方法。正确创建 ToolData 并完成 TCP 标定,能够提高机器人定位精度,为后续搬运、焊接、点胶等应用奠定基础。