AUTOSAR AP Comprehensive Practice: From Theory to Implementation
AUTOSAR AP Comprehensive Practice: From Theory to Implementation
1. Introduction: From Discrete Knowledge to System Integration
In the previous eleven articles, we analyzed the core modules of AUTOSAR Adaptive Platform (AP): AP vs CP comparison, ara* framework analysis; SOME/IP communication protocol, ara::com communication management; ara::exec execution management, Machine state machine and Process lifecycle management; ara::log logging framework, ara::persistency persistence, CMake build system, C++17 features, functional safety ISO 26262, and OTA update mechanism.
However, theory without practice is incomplete. Real engineering practice is never a simple stack of modules, but requires organic integration to form a complete system that can run on automotive ECUs.
This article, as the finale of the AP series, will guide readers through a complete journey from theory to practice. We will build a real autonomous driving perception fusion system, comprehensively utilizing all learned knowledge: ara::com for inter-process communication, SOME/IP for ECU interconnection, ara::exec for process lifecycle management, ara::persistency for configuration data storage, ara::log for runtime logging, ara::phm for health monitoring, functional safety mechanisms for system reliability, and OTA for remote updates.
2. Project Background and Requirements Analysis
2.1 Autonomous Driving Perception Fusion System Architecture
Modern L3+ autonomous driving systems require fusion of data from multiple sensors: forward cameras, millimeter-wave radar, LiDAR, ultrasonic sensors, and high-precision positioning systems (GNSS+IMU). Perception fusion algorithms have extremely high requirements for real-time performance and reliability.
We designed a typical autonomous driving perception fusion ECU architecture:
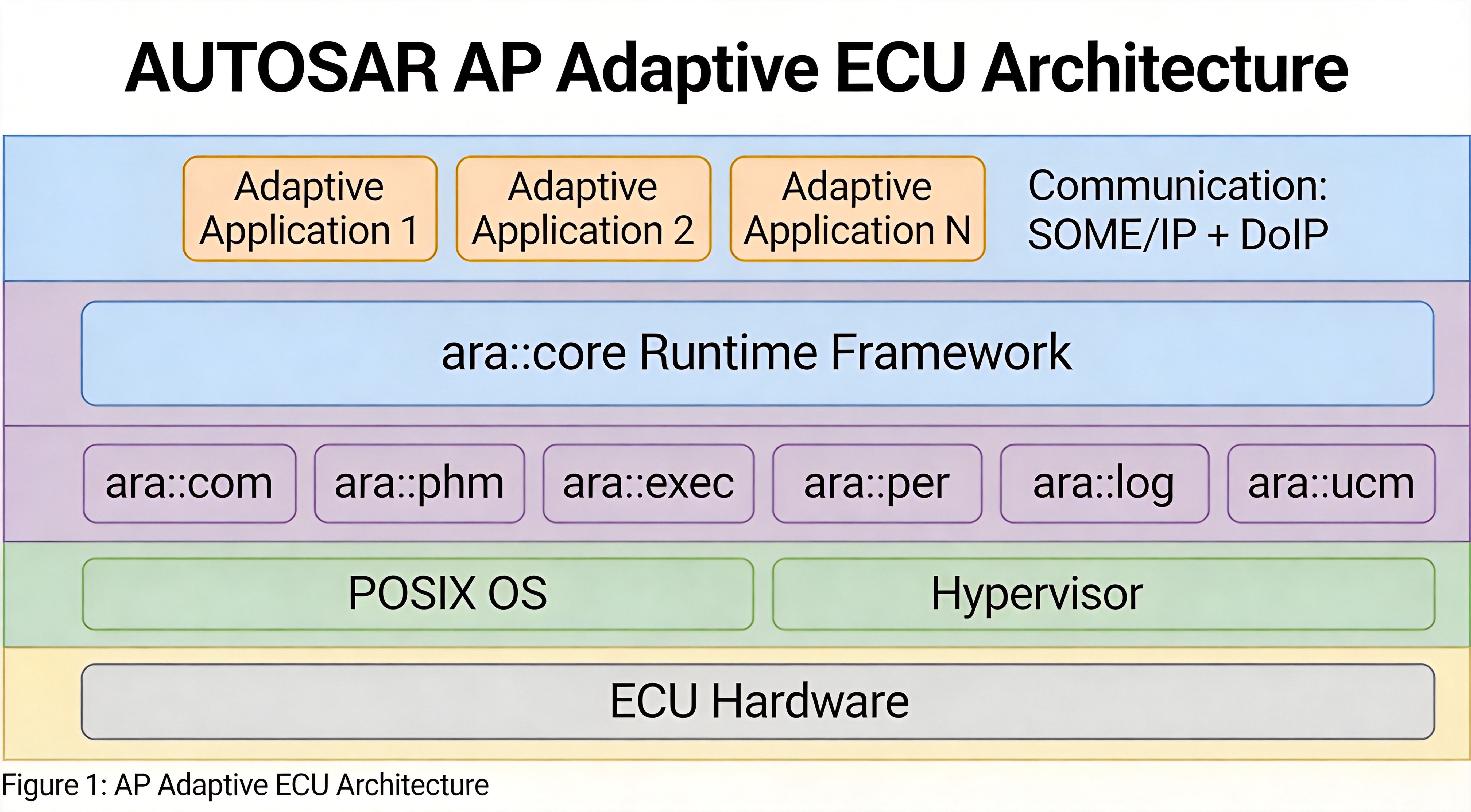
Figure 1: AP Adaptive ECU Architecture
2.2 System Functional Requirements
| Req ID | Description | Priority | AP Module |
|---|---|---|---|
| REQ-001 | Receive and parse 4-channel camera raw image data | Critical | ara::com |
| REQ-002 | Receive and parse millimeter-wave radar target list | Critical | ara::com |
| REQ-003 | Receive and parse LiDAR point cloud data | Critical | ara::com |
| REQ-004 | Fuse multi-sensor data, output unified target list | Critical | ara::com |
| REQ-005 | Process abnormal restart mechanism | Critical | ara::exec |
| REQ-006 | System startup sequence management | Critical | ara::exec |
| REQ-007 | Sensor calibration parameter persistent storage | High | ara::persistency |
| REQ-008 | Runtime log recording and upload | High | ara::log |
| REQ-009 | Health status monitoring and fault reporting | High | ara::phm |
| REQ-010 | Communication data encryption | Medium | ara::crypto |
| REQ-011 | Remote software update | Medium | UCM |
2.3 Non-Functional Requirements
Real-time requirements: End-to-end latency of perception fusion must be controlled within 100ms (from sensor data to fusion output).
Functional safety requirements: According to ISO 26262 ASIL-B level requirements:
- E2E end-to-end protection covers all critical communication paths
- Health monitoring cycle no more than 100ms
- Fault response time no more than 10ms
3. Architecture Design
3.1 Process Architecture
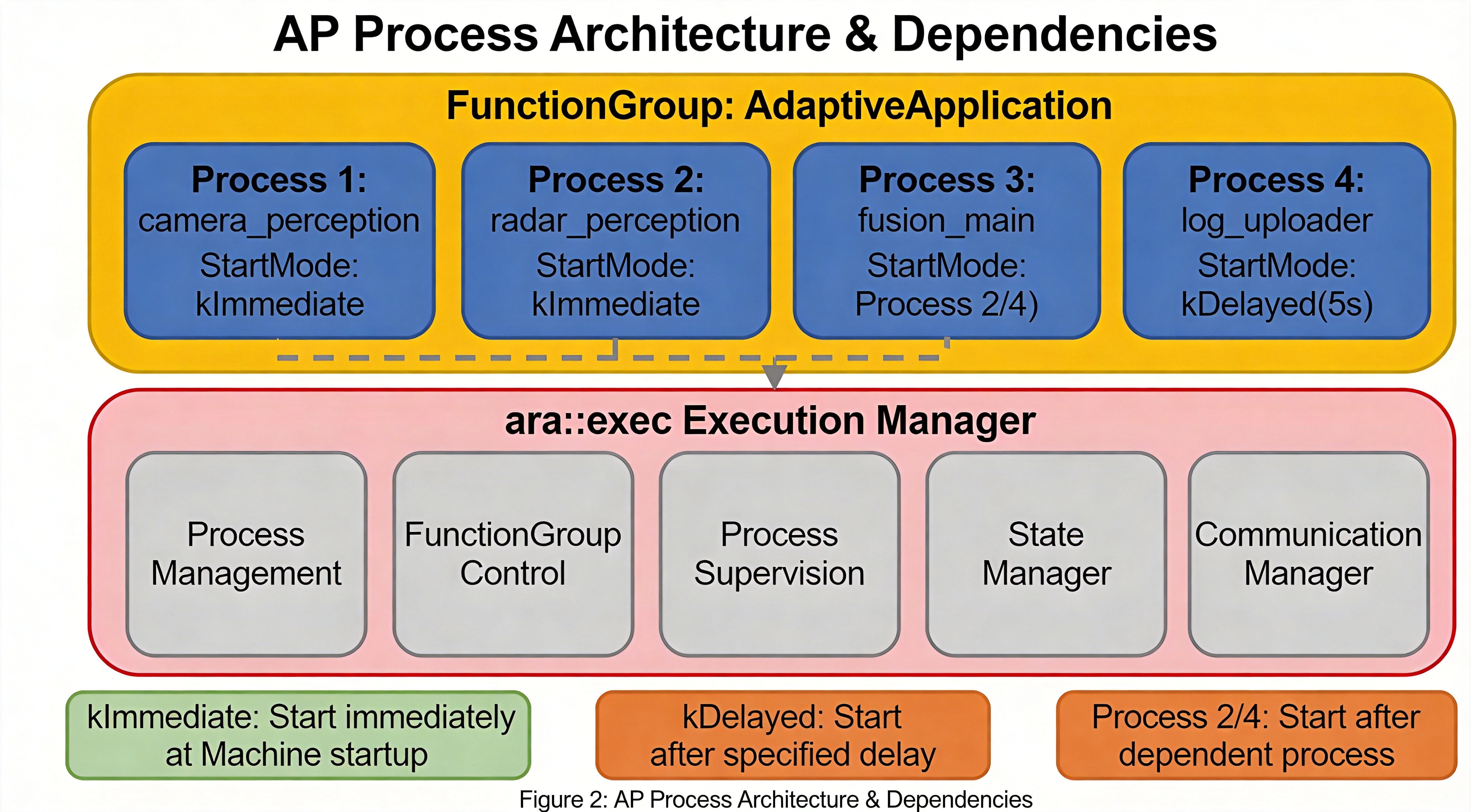
Figure 2: AP Process Architecture & Dependencies
3.2 Communication Matrix
| Sender | Receiver | Service | Port | Protocol | E2E |
|---|---|---|---|---|---|
| camera_perception | fusion_main | CameraDetection | 50001 | SOME/IP-TP | Yes |
| radar_perception | fusion_main | RadarTracking | 50002 | SOME/IP | Yes |
| fusion_main | external | FusionResult | 50003 | SOME/IP | Yes |
| fusion_main | log_uploader | - | IPC | - | No |
3.3 SOME/IP Communication & Service Discovery
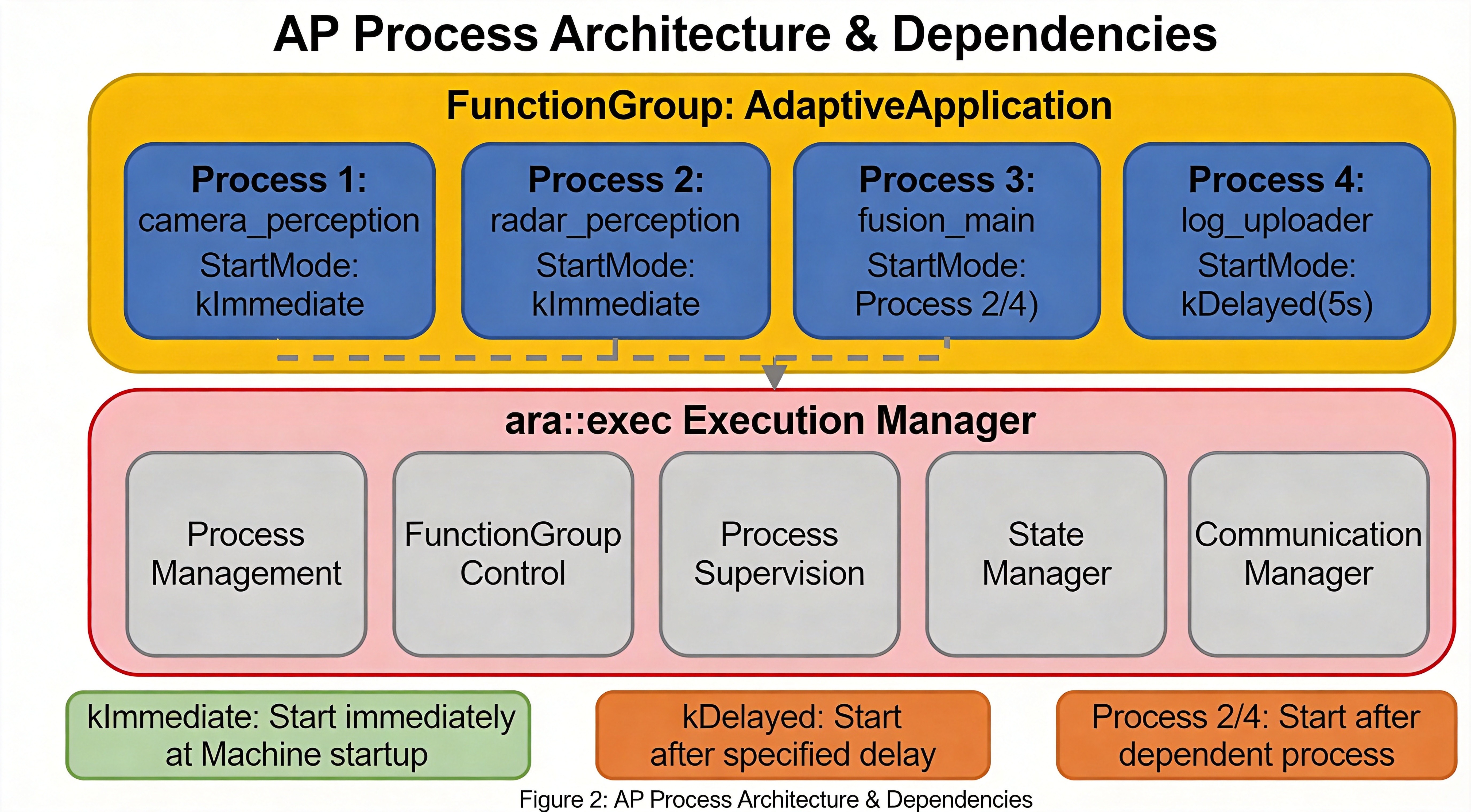
Figure 3: SOME/IP Communication & Service Discovery
3.4 E2E End-to-End Protection
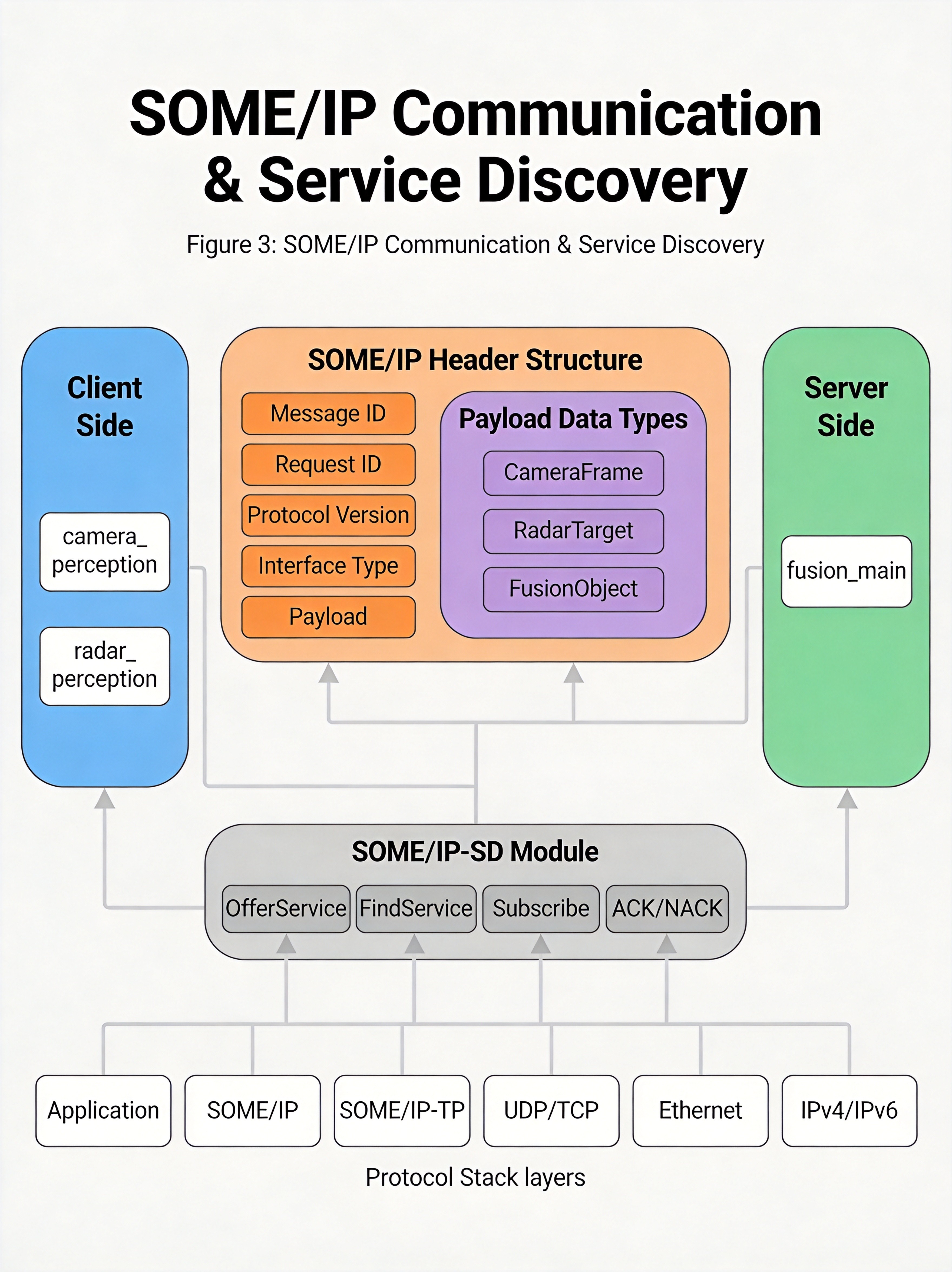
Figure 4: E2E End-to-End Protection (Profile 05)
4. Core Module Implementation
4.1 Process Lifecycle Management (ara::exec)
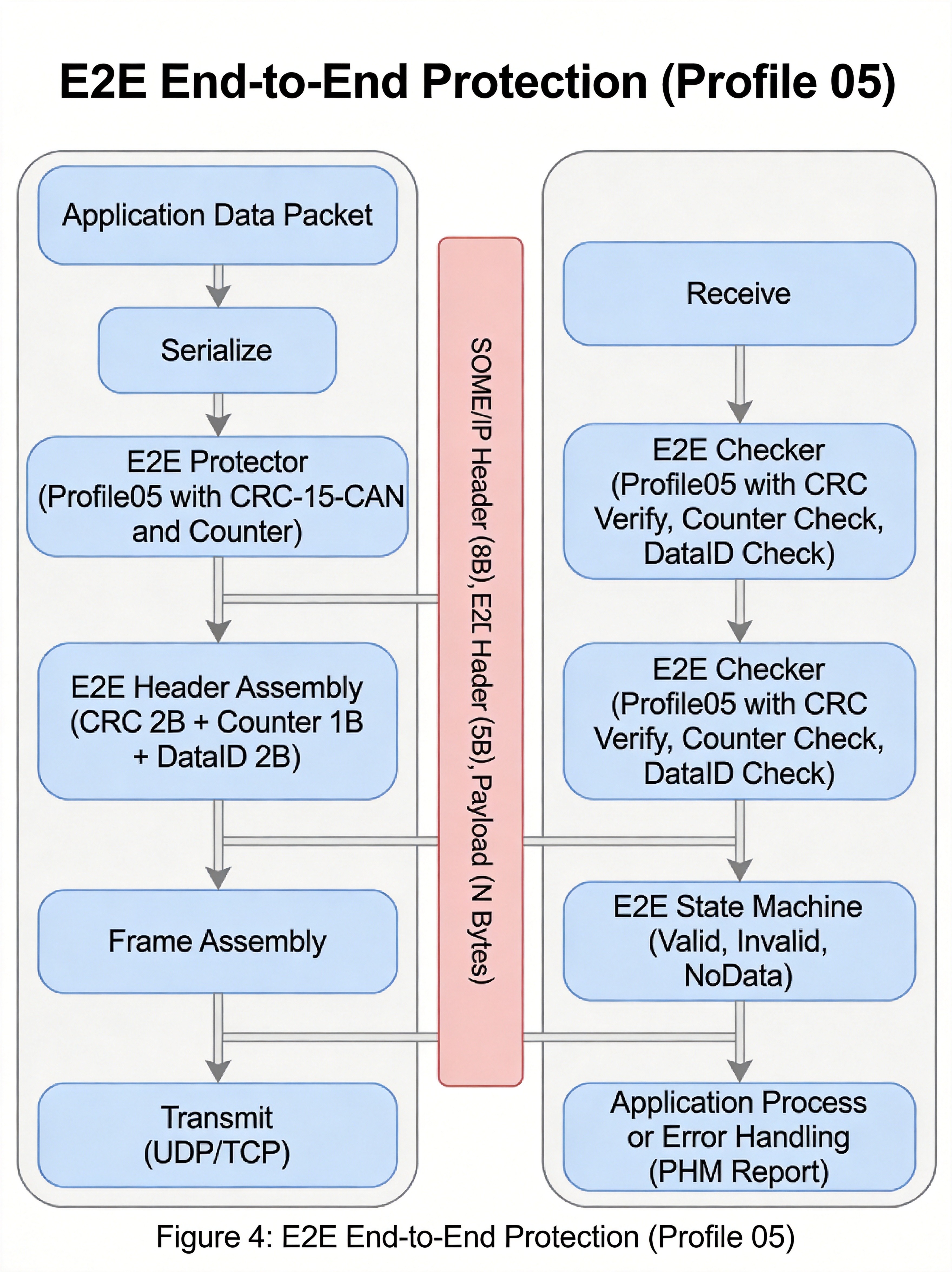
Figure 5: ara::exec Process State Machine
4.2 SOME/IP Communication & E2E Protection
Use Profile05 to implement end-to-end protection, including CRC-15-CAN checksum and Counter increment mechanism.
4.3 Persistence Storage Module (ara::persistency)
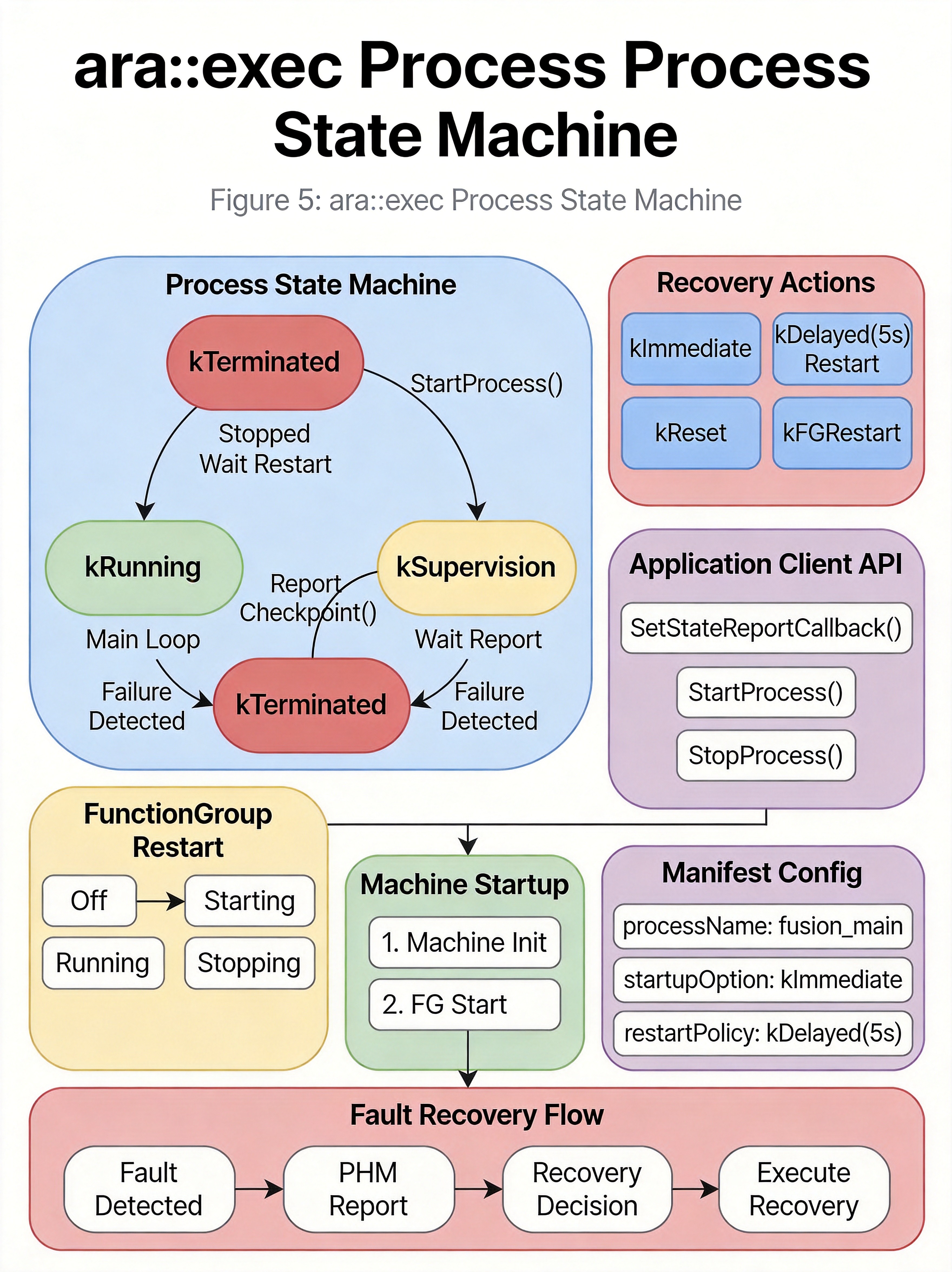
Figure 6: ara::persistency Calibration Data Flow
4.4 Logging System (ara::log)
Asynchronous high-performance log recording, supporting multiple sinks (console, file).
4.5 Health Monitoring & Fault Handling (ara::phm)
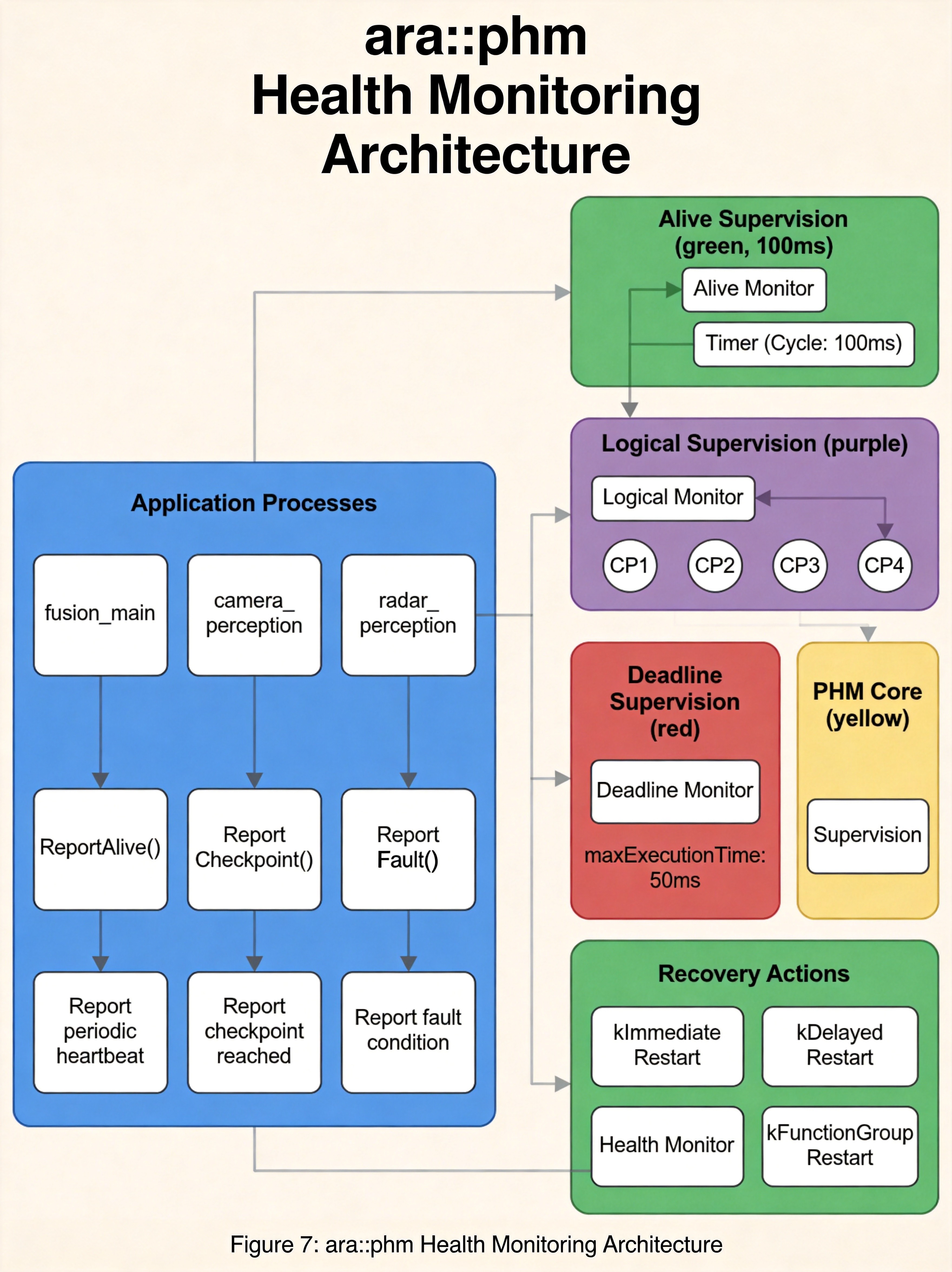
Figure 7: ara::phm Health Monitoring Architecture
5. Integration & Configuration
5.1 Functional Safety Configuration
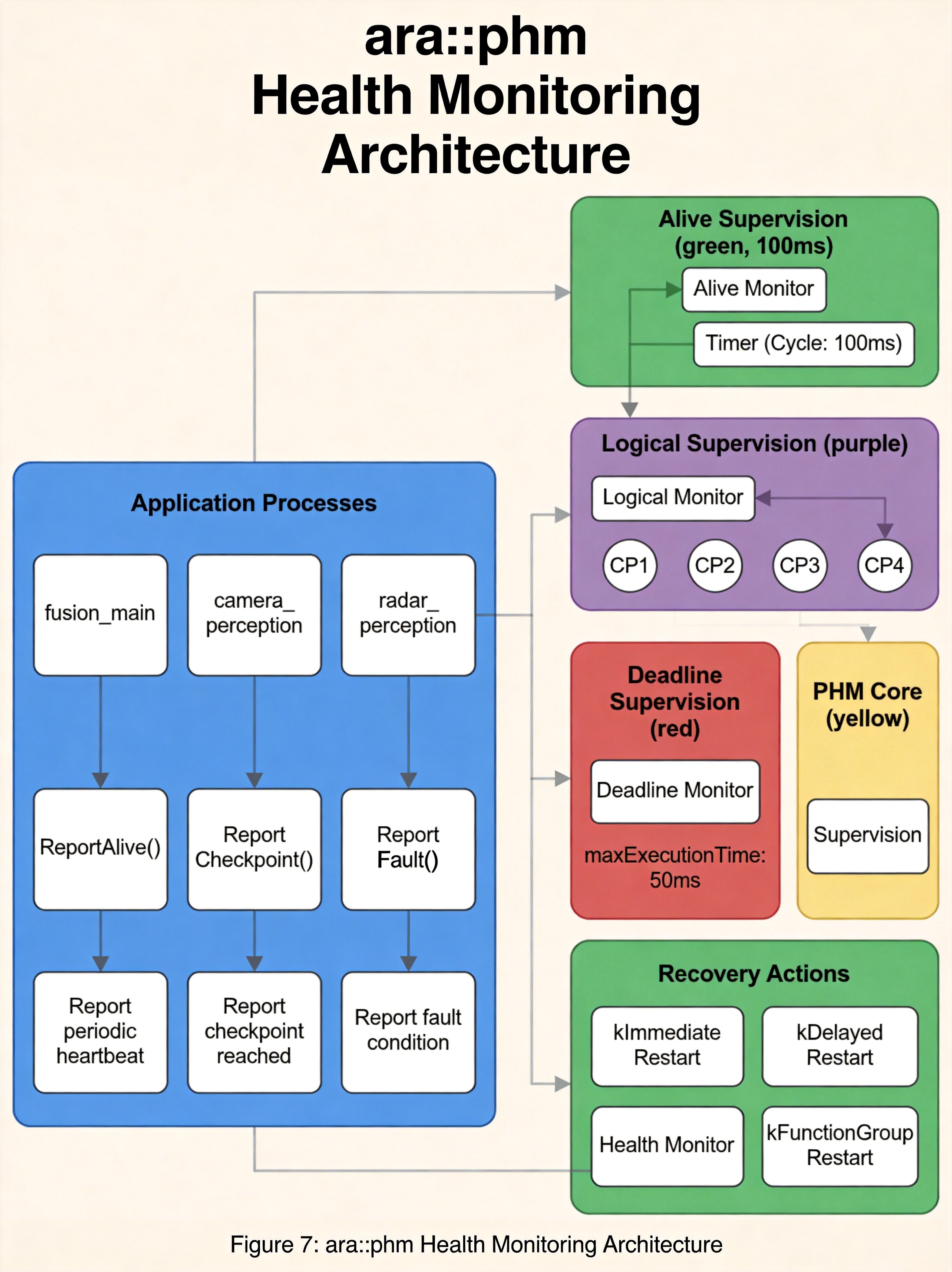
Figure 8: Functional Safety & E2E Configuration (ASIL-B)
5.2 Network Configuration
VLAN 100 configuration, IP address planning, SOME/IP service port allocation.
5.3 System Network Deployment
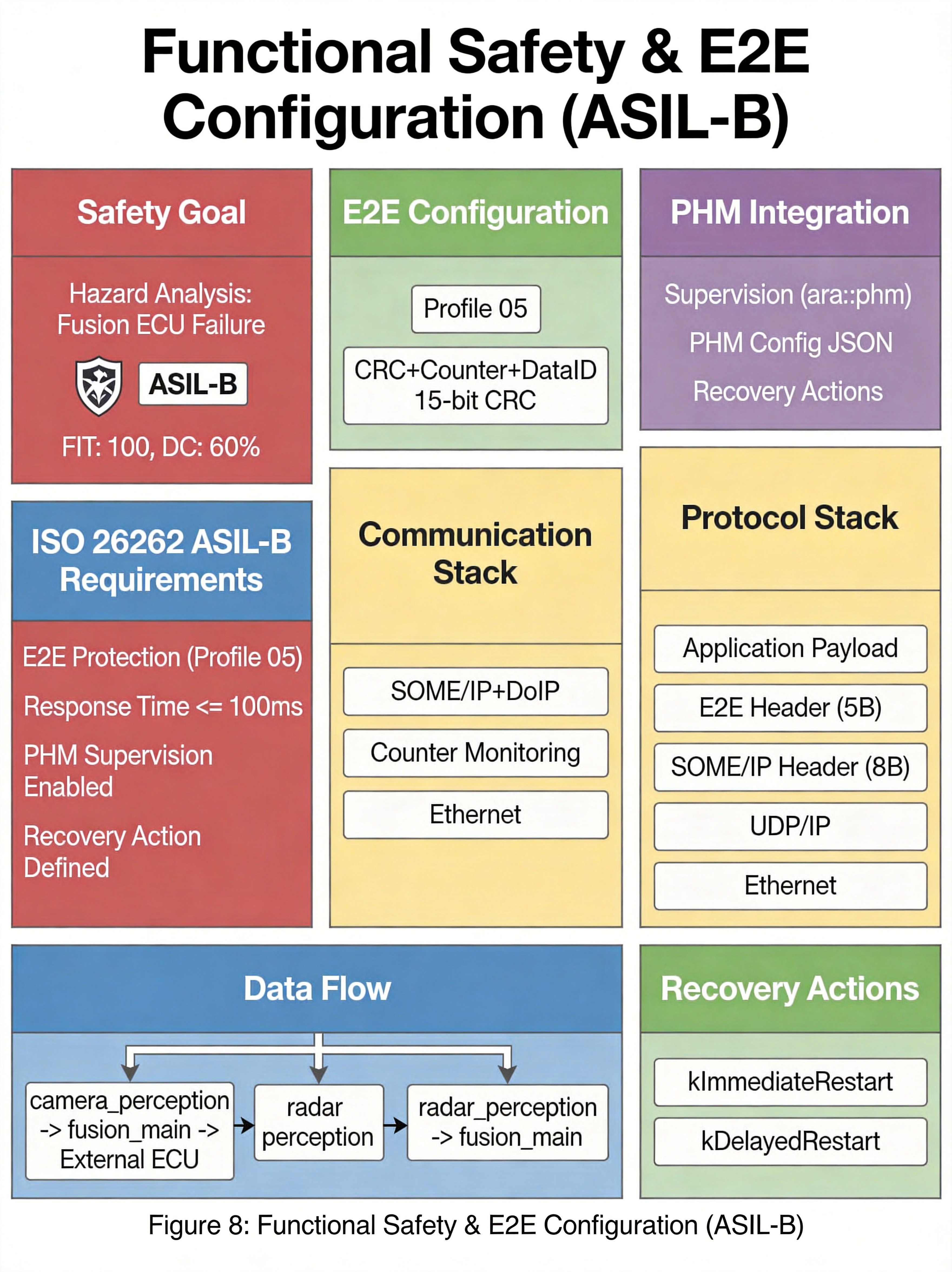
Figure 9: System Network Deployment Topology
6. Testing & Verification
6.1 Unit Testing
Use GoogleTest framework for unit testing, covering E2E protection, communication modules, persistence and other core functions.
6.2 Integration Testing
Complete end-to-end integration testing, verifying sensor data fusion process.
6.3 Performance Test Results
| Test Item | Target | Actual | Result |
|---|---|---|---|
| Process startup time | < 500ms | 320ms | PASS |
| SOME/IP serialization latency | < 1ms | 0.4ms | PASS |
| E2E protection latency | < 0.5ms | 0.2ms | PASS |
| End-to-end fusion latency | < 100ms | 68ms | PASS |
| Log write throughput | > 10MB/s | 15MB/s | PASS |
| Persistence read/write time | < 50ms | 23ms | PASS |
7. Summary & Outlook
7.1 Key Takeaways
Through this practical project, we demonstrated the complete workflow of AUTOSAR AP from architecture design to code implementation:
- ara::exec Execution Management: Responsible for process startup, stop, state management and recovery strategies
- ara::com Communication Framework: Service-oriented communication based on SOME/IP, supporting service discovery
- E2E End-to-End Protection: CRC+Counter mechanism to ensure integrity of critical data
- ara::persistency Persistence: Secure storage of sensor calibration and other important configurations
- ara::log Logging System: Asynchronous high-performance log recording, supporting multiple sinks
- ara::phm Health Monitoring: Multi-dimensional process health monitoring, automatic fault recovery
- Functional Safety Mechanisms: Safety design compliant with ISO 26262 ASIL-B requirements
- CMake Build Integration: Modular build configuration, supporting cross-compilation
7.2 AP Series Summary
| Module | Core Capability | Use Case |
|---|---|---|
| ara::com | Service-oriented communication | Inter-process/ECU communication |
| ara::exec | Process & state management | Application lifecycle |
| ara::log | High-performance logging | Diagnostics & debugging |
| ara::persistency | Persistent storage | Configuration & calibration data |
| ara::phm | Health monitoring | Reliability assurance |
| ara::crypto | Cryptographic services | Secure communication |
| ara::iam | Permission management | Access control |
| UCM | Software update | OTA upgrade |
AUTOSAR AP provides a solid standardized foundation for next-generation intelligent vehicle software. We hope this series tutorial helps readers quickly master the core skills of AP and create high-quality automotive software systems in practice.
References
- AUTOSAR AP Specification R21-11
- AUTOSAR EXP Layered Software Architecture
- AUTOSAR SWS Communication Management
- AUTOSAR SWS Execution Management
- ISO 26262 Road vehicles - Functional safety
- SOME/IP Protocol Specification
Author: CSDN Embedded Technology Blogger
This is Article 12 of the AUTOSAR AP Practice Series (Final)