闭着眼在口袋里摸出钥匙、戴着厚手套把线穿进针眼、捏起一块豆腐又不把它捏碎------这些事你不用看,靠手就能完成。换成今天最强的 VLA 机器人,大概率要翻车。
原因很简单:VLA 这套范式,本质是「看着干活」。
它把视觉、语言、动作接到一个统一接口里,这两年语义理解和泛化突飞猛进------你说「把红色的杯子递给我」,它能听懂、能找到、能递过去。
但任务一旦进入「接触」环节------拧、插、捏、抹------光靠眼睛就不够了。眼睛能看到手「在哪」,却感觉不到手「使了多大劲、有没有打滑」。这块缺的拼图,就是触觉。
触觉重要,早就是共识。这些年触觉路线也没闲着:从把力觉直接喂给模仿学习策略,到联合预测未来的触觉或视觉,再到把触觉当成低层的快速修正信号接进控制器;怎么把触觉塞进 VLA,也已经有 VTLA、OmniVLA 这些代表作在探。
触觉对建模动力学、对接触型任务有多关键,这一点没人会反对。
可奇怪的是,今天主流的技术报告里,真正用上触觉的还是少数。为什么?道理也不复杂:触觉这条路线还没收敛,传感器、处理方法都还在试错;更头疼的是,触觉信息怎么和 backbone 接得更顺、怎么和视觉语言这些模态对齐,本身就是个大难题。
说白了,大家都知道触觉是好东西,但还没摸清「怎么把它优雅地塞进去」。
最近,徐丹飞和李飞飞的一篇新工作给了个挺新的思路,合作者里还有英伟达的 Jim Fan------光这个阵容,就值得点开看看。(老读者应该记得,我们之前专门聊过徐丹飞那条线。)
- 论文标题:T-Rex: Tactile-Reactive Dexterous Manipulation
- arXiv:https://arxiv.org/abs/2606.17055
- 项目主页:https://tactile-rex.github.io/
T-Rex 先把现有「让机器人用触觉干活」的做法,理成了三类,每一类都点明了长处和没解决的事。
第一类,把触觉直接接进操作策略。最早的做法很糙------拿个浅浅的 MLP,把触觉读数当额外输入,塞进模仿学习策略就完事;后来越做越精细:有人专门设计了能感知刚体位姿的触觉表示,有人让模型联合预测「未来视觉/未来触觉 + 动作」,也有人把触觉放进低层的动作修正模块里。这一类已经把一件事证明清楚了:在抓取稳不稳、细小接触怎么调、捏软乎乎的可变形物体这些事上,触觉是真有用。
第二类,触觉感知版的 VLA。这一类开始把触觉当成 VLA 的一个额外模态,或者干脆显式去对齐视觉、语言、触觉的 latent,也有人专门为「力与接触」这种信号设计结构。思路对,但有个共同缺口:大多还没形成一套「先大规模预训练、再用触觉做中期训练补能力」的标准打法,尤其在双手灵巧操作这种最难的场景里更少见。论文说得很直白:现有工作大多还停在单臂、或者平行夹爪。
第三类,大规模第一视角人类视频预训练。EgoScale、EgoVLA、EgoMimic 这一批,从人的第一视角视频里学操作先验------这条路的价值早被反复证明。(我们去年 8 月也写过第一视角人类视频那条线。)它给的是大量视觉语义和手部交互先验,但短板也明显:它压根没覆盖机器人的触觉信号,更没覆盖「机器人一接触到物体、就得实时改动作」的那段闭环控制。
T-Rex 的聪明之处,是不押单一路线,而是把这三件事拼到一起:保留大规模人类视频预训练(拿视觉语义和手部先验)、补一套触觉同步的机器人中期训练数据(把机器人真正接触时的触觉补上)、再用一个能区分「低频规划」和「高频修正」的结构,把两边接起来。
打个比方,这套结构特别像人干精细活时的两套节奏:低频规划,是大脑在想「接下来该拧哪、往哪插」;高频修正,是手指一感觉到打滑,不等大脑反应过来就先使了把劲。T-Rex 想做的,就是让机器人同时拥有这两套节奏------既有 VLA 给的「脑子」,又有触觉给的「手感」。
路线还没收敛,T-Rex 未必是终局。但它至少把一件被绕过去太久的事摆回了台面:VLA 这两年补语义、补泛化、补世界模型,补到现在,该补「手感」了。一个只会看、不会摸的机器人,永远干不了最需要手上功夫的那些活。
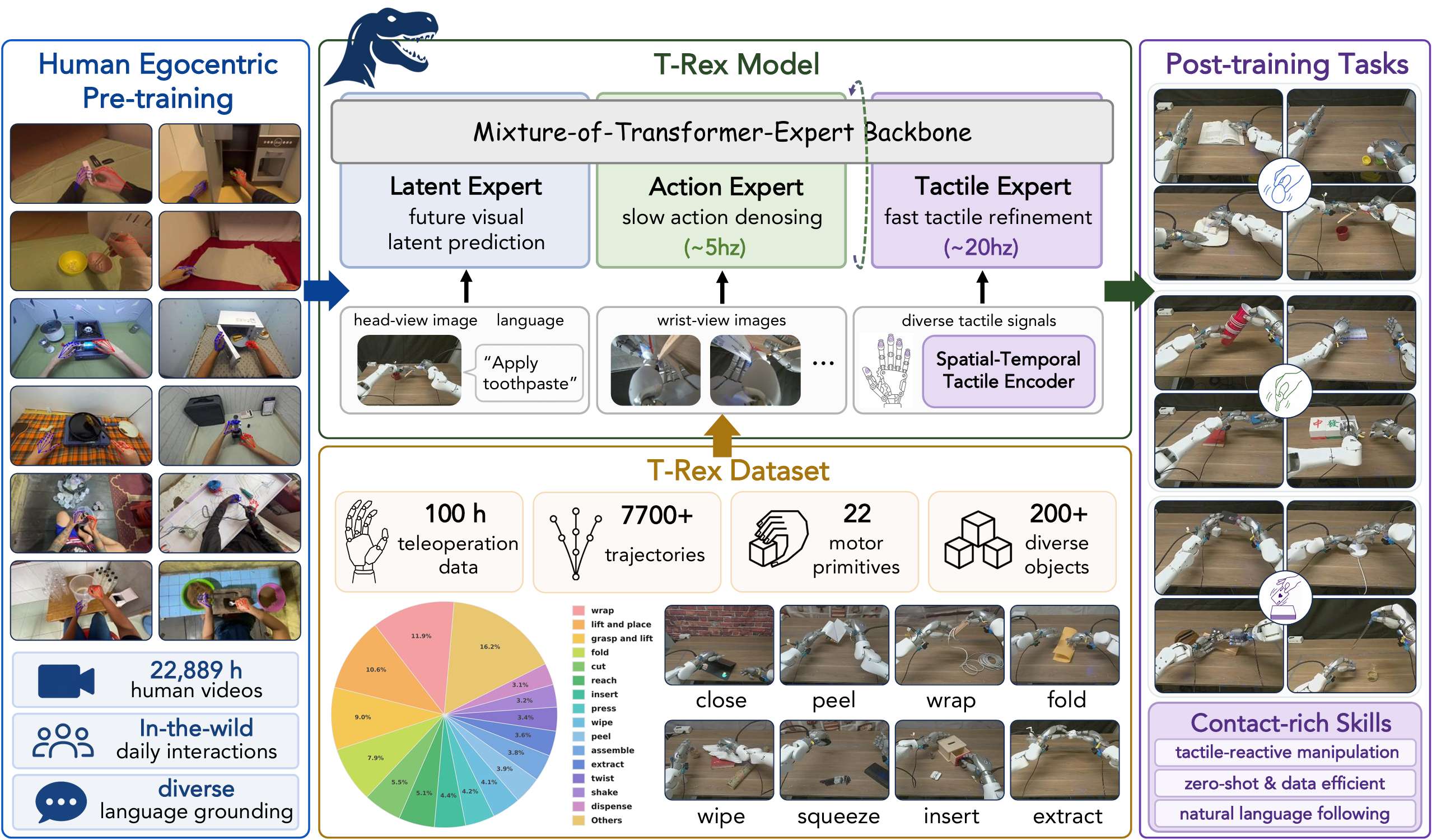
数据与训练配方:22889 小时「看人干活」,换那 100 小时的「手感」
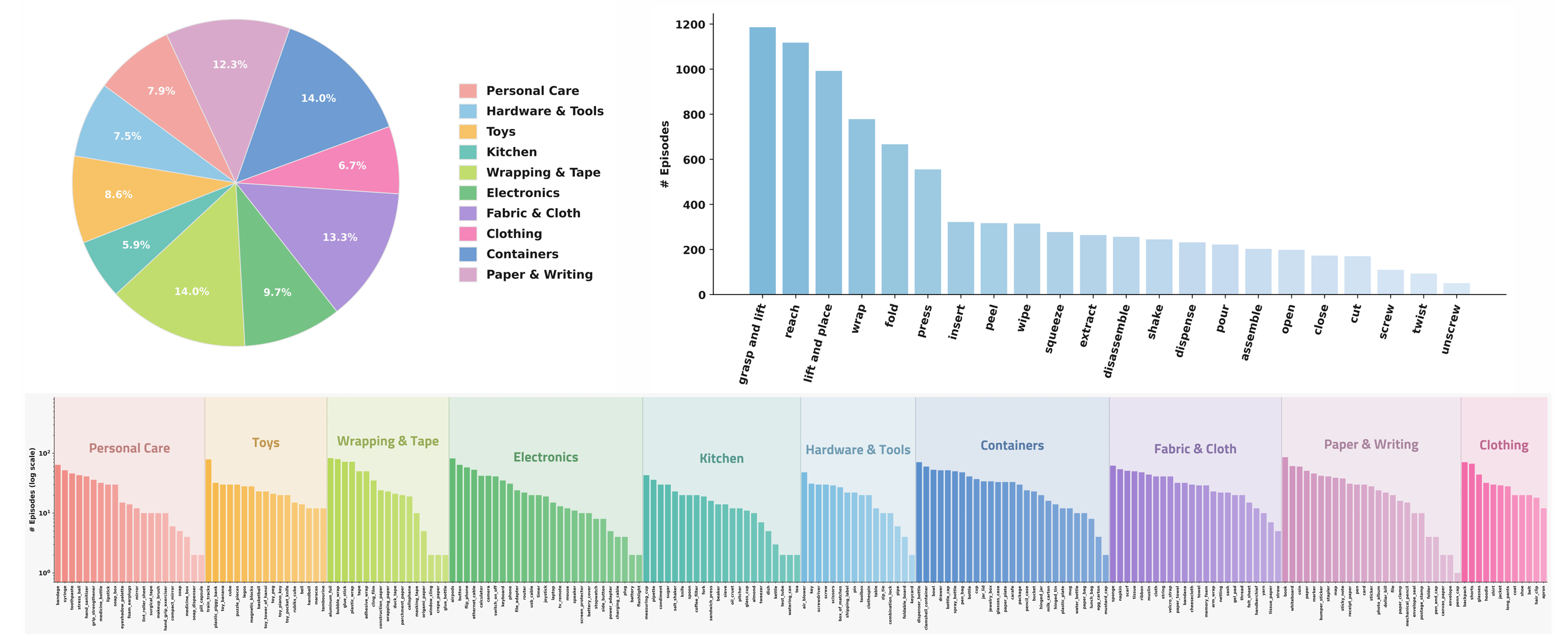
做具身的人都懂一个道理:真正贵的,从来不是「任意的机器人数据」,而是足够多、足够广、还带着同步触觉的灵巧操作数据。T-Rex 想清楚了这件事,所以它没把数据集做成「少数几个任务反复演示」的长尾集合,而是围绕两个轴去铺------动作原语和物体交互。
什么叫动作原语?说白了,就是操作的「基本动作单位」------拧、插、推、捏、倒......复杂任务都是这些原语拼出来的,有点像操作版的乐高积木。T-Rex 拿 207 个常见家居物体,去和 22 个动作原语做组合,理论上能配出 4554 种「物体-动作」对。但这里面一大半物理上根本不成立(你没法「拧」一个西瓜),逐个做可行性筛查删掉之后,最后留下 502 个真正有效的组合,共 7755 条轨迹。
这些轨迹有多「实」?中位长度 29.8 秒,四分位区间 21.0 到 41.1 秒,平均每个有效组合约 16 条演示。每一条都不是光有画面,而是同步打包了:头部相机 + 两个腕部相机的 RGB、双臂的本体状态、双手指尖的触觉力向量、接触的形变图,再加一句语言指令------高层线程按 30 Hz 对齐时间戳。说白了,机器人每一刻「看到什么、摸到什么、使了多大劲、被要求干什么」,全都对得上。
为了不让策略只会「死记固定布局」,T-Rex 还特意在场景上加了扰动:6 种桌面背景、随机摆放的干扰物、目标物体的初始位姿也随机化。逼着模型去理解任务本身,而不是背答案。
有个细节挺值得说。这套数据的语言标注,不是人一句句手写的,而是先让一个商业视觉语言模型,根据几帧采样画面 + 物体名 + 动作原语名,自动生成命令句,再由人工核验、过滤掉幻觉和不准的描述。这招很省成本,但也提醒了一件事:标注质量,始终是整条流水线里那个不能松手的环节------AI 起草、人来把关,这套配合本身就是当下做数据的常态。
T-Rex 的低频动作规划和高频触觉修正
T-Rex 的策略输入包含当前 RGB 观测 o t o_t ot、语言指令 ℓ \ell ℓ、触觉力历史 f t − H f : t f_{t-H_f:t} ft−Hf:t 和触觉形变图 d t d_t dt。作者把多模态context记为:
c t = { o t , ℓ , f t − H f : t , d t } , c_t=\{o_t,\ell,f_{t-H_f:t},d_t\}, ct={ot,ℓ,ft−Hf:t,dt},
并让策略预测未来一段动作块 A t : t + H A_{t:t+H} At:t+H。动作生成采用 conditional flow matching,训练目标写为
L F M ( θ ) = E ∥ v θ ( x τ , τ ∣ c t ) − ( x 1 − x 0 ) ∥ 2 . \mathcal{L}_{\mathrm{FM}}(\theta)=\mathbb{E}\left\\left\\\|v_\\theta(x_\\tau,\\tau\\mid c_t)-(x_1-x_0)\\right\\\|\^2\\right. LFM(θ)=E∥vθ(xτ,τ∣ct)−(x1−x0)∥2.
这里 x 0 = A t : t + H x_0=A_{t:t+H} x0=At:t+H 表示干净的动作块, x 1 = ϵ ∼ N ( 0 , I ) x_1=\epsilon\sim\mathcal{N}(0,I) x1=ϵ∼N(0,I) 表示高斯噪声; v θ v_\theta vθ 要学习的是从噪声轨迹回到真实动作轨迹的向量场。这个写法本身不稀奇,关键在于后面怎么把它拆成两个频率不同的 expert。
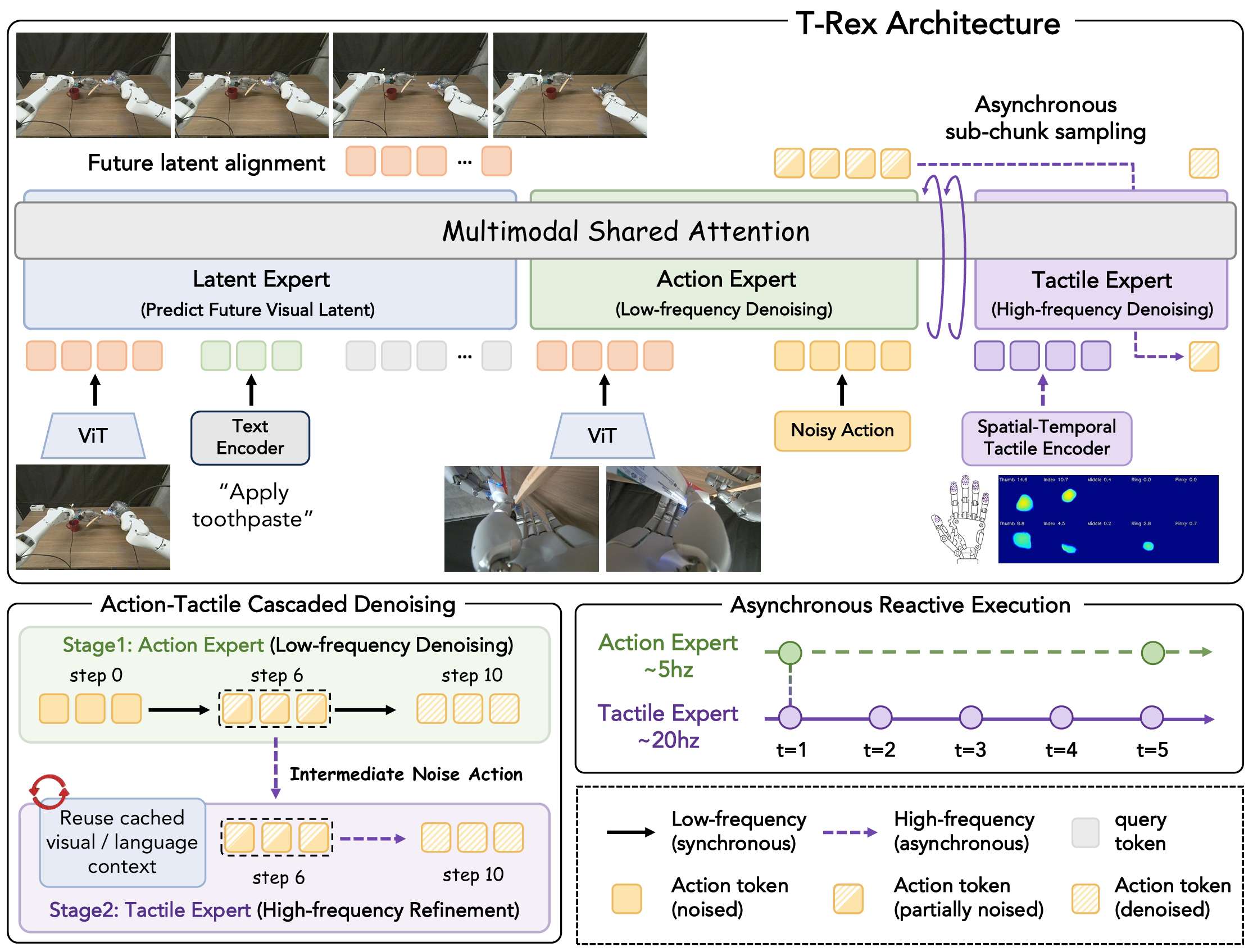
T-Rex 的骨干是 Mixture-of-Transformer-Experts(MoT)。三个 expert 的职责分工是:
- latent expert:处理视觉和语言,预测未来视觉表征,给动作生成提供带时间方向的上下文;
- action expert:在较低频率上完成动作去噪,先生成一个中间动作状态;
- tactile expert:复用冻结的视觉-语言上下文,在更高频率下根据实时触觉继续去噪,输出最终动作。
触觉编码器不是简单地把一帧力信号扔进去。作者把它写成
z t ⊤ = E m b v q ( E f ( f t − 15 : t ) ) ; P r o j f ( f t ) ; P r o j d ( E d ( d t ) ) . z_t^\top=\left\\mathrm{Emb}_{\\mathrm{vq}}(E_f(f_{t-15:t}));\\mathrm{Proj}_f(f_t);\\mathrm{Proj}_d(E_d(d_t))\\right. zt⊤=Embvq(Ef(ft−15:t));Projf(ft);Projd(Ed(dt)).
这条式子对应三部分信息:
- E f ( f t − 15 : t ) E_f(f_{t-15:t}) Ef(ft−15:t):对最近 16 帧力历史做时间编码,捕获接触变化过程;
- E m b v q ( ⋅ ) \mathrm{Emb}_{\mathrm{vq}}(\cdot) Embvq(⋅):把时间编码后的力觉表示量化到离散 token 空间里,降低噪声和漂移影响;
- P r o j f ( f t ) \mathrm{Proj}_f(f_t) Projf(ft):保留当前时刻的瞬时力信息,避免只看历史而丢掉此刻接触强度;
- E d ( d t ) E_d(d_t) Ed(dt) 与 P r o j d ( ⋅ ) \mathrm{Proj}_d(\cdot) Projd(⋅):从当前形变图提取空间接触几何,例如边缘、剪切、滑移痕迹。
附录给了更多实现细节。每根手指的力觉时间窗长度是 T = 16 T=16 T=16,VQ-VAE 的 codebook 大小是 K = 64 K=64 K=64,codebook 用 EMA 更新;为了避免模型只学到"多数时间没接触"这种主导状态,重建损失对高接触力帧施加更高权重。另一方面,形变图编码器先用自监督卷积自编码器预训练,再在策略学习阶段冻结。这个组合说明作者很在意两个问题:一是高频触觉的时间动态,二是不同触觉硬件下常见的噪声与漂移。
真正的核心创新是 异步触觉反应级联流匹配。这里先定义共享的 flow 目标:
x τ = ( 1 − τ ) A d e m o + τ ϵ , v ⋆ = ϵ − A d e m o . x_\tau=(1-\tau)A^{\mathrm{demo}}+\tau\epsilon,\qquad v^\star=\epsilon-A^{\mathrm{demo}}. xτ=(1−τ)Ademo+τϵ,v⋆=ϵ−Ademo.
A d e m o A^{\mathrm{demo}} Ademo 是演示动作块, ϵ \epsilon ϵ 是高斯噪声, x τ x_\tau xτ 是两者之间的线性插值, v ⋆ v^\star v⋆ 是整个去噪过程要回归的常速度目标。action expert 和 tactile expert 都学习这个同一个目标,但它们处理的是不同时间段的去噪区间。
慢速流先跑上半段。推理时总共使用 N = 10 N=10 N=10 个 Euler 步,并把分界点固定在 τ s p l i t = 0.4 \tau_{\mathrm{split}}=0.4 τsplit=0.4:
x ^ τ s p l i t = E u l e r ( f θ a c t ; x 1 , τ : 1 → 0.4 , K s l o w = 6 ) . \hat{x}{\tau{\mathrm{split}}}=\mathrm{Euler}\left(f_\theta^{\mathrm{act}};x_1,\tau:1\rightarrow0.4,K_{\mathrm{slow}}=6\right). x^τsplit=Euler(fθact;x1,τ:1→0.4,Kslow=6).
这一步的意思是,让 action expert 先从纯噪声 x 1 x_1 x1 出发,完成 6 步低频去噪,得到一个中间动作状态 x ^ τ s p l i t \hat{x}{\tau{\mathrm{split}}} x^τsplit。它已经包含了视觉、语言和整体动作意图,但还没有被实时触觉充分修正。
快速流再接手下半段:
A t : t + T a = E u l e r ( f θ t a c ; x ^ τ s p l i t , τ : 0.4 → 0 , K f a s t = 4 ) . A_{t:t+T_a}=\mathrm{Euler}\left(f_\theta^{\mathrm{tac}};\hat{x}{\tau{\mathrm{split}}},\tau:0.4\rightarrow0,K_{\mathrm{fast}}=4\right). At:t+Ta=Euler(fθtac;x^τsplit,τ:0.4→0,Kfast=4).
这里动作块长度 T a = 16 T_a=16 Ta=16,tactile expert 会在块内偏移 { 0 , 4 , 8 , 12 } \{0,4,8,12\} {0,4,8,12} 这些时刻被异步触发。它不再重复整套视觉网络,而是直接读取实时触觉 token 和缓存下来的视觉-语言上下文,对中间动作做高频修正。论文把这一点看得很重,因为真正的接触反应,本来就应该建立在"视觉上下文相对稳定,但触觉变化很快"的事实上。
训练目标相应拆成两部分:
L a c t = ∥ f θ a c t ( x τ a c t , τ a c t ) − v ⋆ ∥ 2 , L t a c = ∥ f θ t a c ( x τ t a c , τ t a c ; K V τ s p l i t ) − v ⋆ ∥ 2 . \mathcal{L}{\mathrm{act}}= \left\|f\theta^{\mathrm{act}}(x_{\tau_{\mathrm{act}}},\tau_{\mathrm{act}})-v^\star\right\|^2, \qquad \mathcal{L}{\mathrm{tac}}= \left\|f\theta^{\mathrm{tac}}(x_{\tau_{\mathrm{tac}}},\tau_{\mathrm{tac}};KV_{\tau_{\mathrm{split}}})-v^\star\right\|^2. Lact= fθact(xτact,τact)−v⋆ 2,Ltac= fθtac(xτtac,τtac;KVτsplit)−v⋆ 2.
主文里把 tactile expert 的条件写成 K V τ s p l i t KV_{\tau_{\mathrm{split}}} KVτsplit,附录又进一步说明它实际上依赖两部分上下文:一部分是分界点缓存下来的 K V τ s p l i t KV_{\tau_{\mathrm{split}}} KVτsplit,另一部分是高频触觉 token c t a c c_{\mathrm{tac}} ctac。更重要的是,tactile expert 不直接看原始视觉观测,它只用触觉流和缓存的中间上下文来修正动作,这样才能把高频计算成本压下来。
总损失为
L = L a c t + λ t a c L t a c + λ f u t u r e L f u t u r e , \mathcal{L}=\mathcal{L}{\mathrm{act}}+\lambda{\mathrm{tac}}\mathcal{L}{\mathrm{tac}}+\lambda{\mathrm{future}}\mathcal{L}_{\mathrm{future}}, L=Lact+λtacLtac+λfutureLfuture,
其中 λ t a c = 1.0 \lambda_{\mathrm{tac}}=1.0 λtac=1.0, λ f u t u r e = 0.5 \lambda_{\mathrm{future}}=0.5 λfuture=0.5。 L f u t u r e \mathcal{L}_{\mathrm{future}} Lfuture 用来约束 latent expert 预测未来视觉表征,让模型在训练时持续保持对未来交互结果的时间对齐。
附录里还有两个很容易被忽略、但实际上很关键的设计。
第一,工作会把 action 位置在分界点重新编码,再与视觉语言键值一起组成 K V τ s p l i t KV_{\tau_{\mathrm{split}}} KVτsplit。这样 tactile expert 看到的不是"最初的噪声时间编码",而是已经部分去噪后的中间上下文。
第二,专门加入了 delay augmentation。部署时,视觉缓存和实时触觉天然存在时间错位,所以训练时显式从 { 0 , 4 , 8 , 12 } \{0,4,8,12\} {0,4,8,12} 里采样离散延迟,去模拟这种"视觉略旧、触觉更新更快"的状态。这个方案瞄准了工程实现上的一个痛点,很值得关注。
实验对比分析
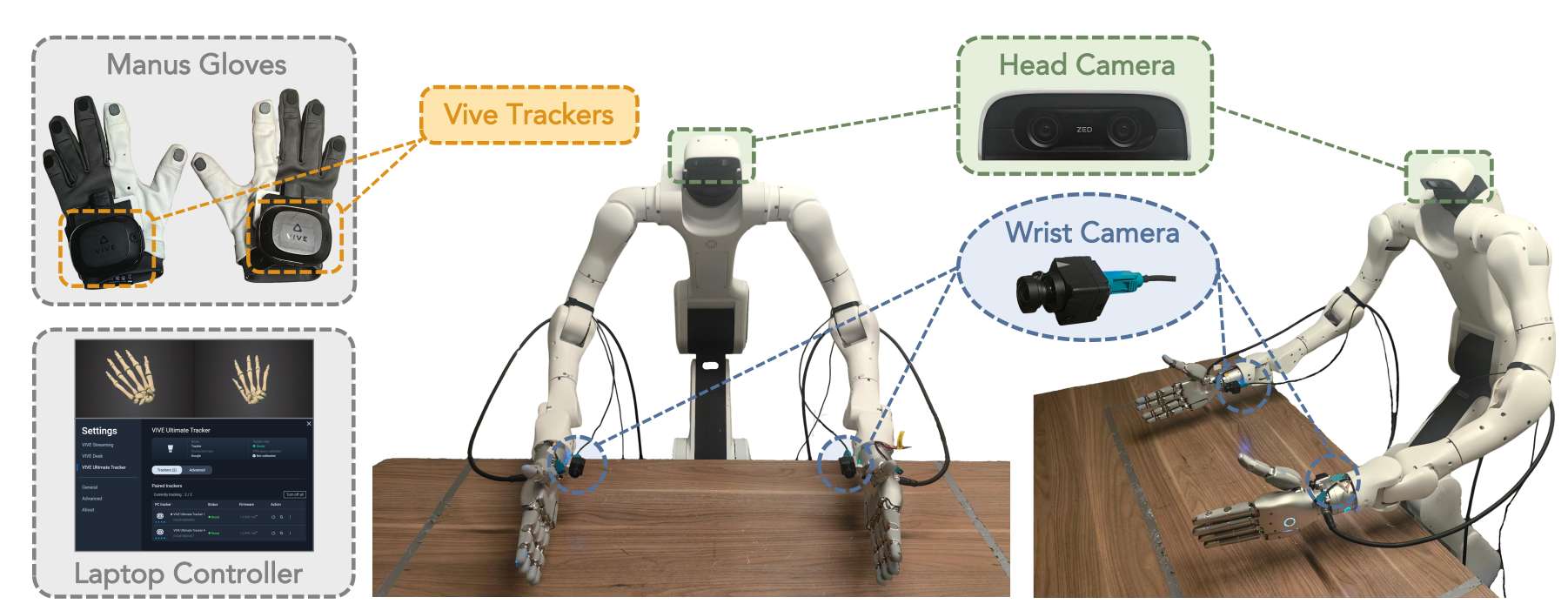
1)用了Sharpa的手,和Dexmate Vega-1
实验平台是固定底座的双臂 Dexmate Vega-1,配两只 22 自由度的 Sharpa Wave 灵巧手。策略看头部和腕部相机图像、每根手指的触觉力向量与形变图,双臂用相对末端位姿增量控制,手指用绝对关节控制。评测基准一共 12 个接触丰富任务,每个任务测试 16 次,并按多阶段进度给分。
2)任务性能分析
T-Rex 在 12 个任务上的平均成功率达到 65%,最强基线 EgoScale 为 35%,整整低了 30 个点。
更有意思的是,给预训练 VLA 生硬加触觉输入并不自动带来收益,0.5 + tactile 的平均成功率只有 6%,甚至比不带触觉的 0.5 还差很多。这说明问题不在"有没有触觉",而在"触觉是以什么结构、什么频率、什么训练方式接进去的"。
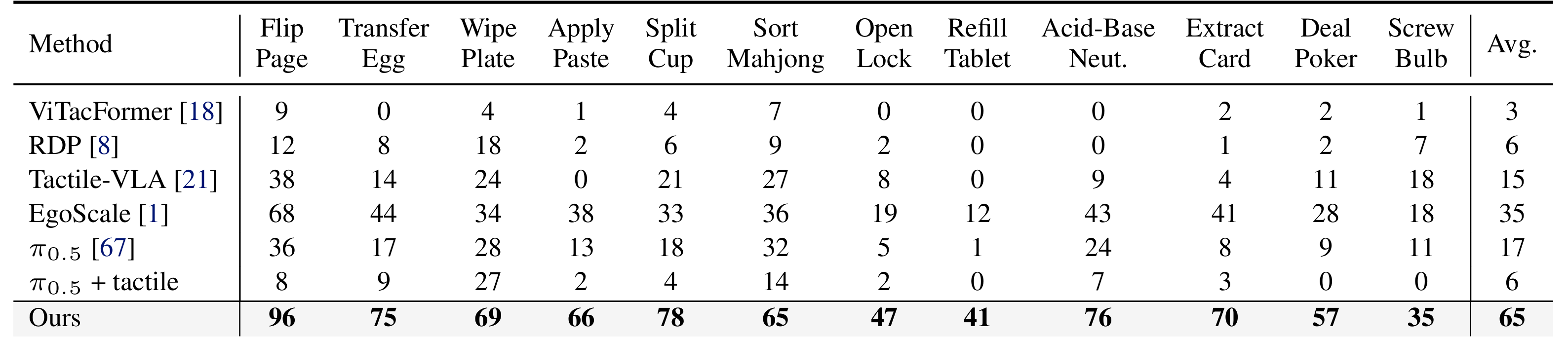
从具体任务看,T-Rex 在翻页、转移鸡蛋、开锁、取卡、酸碱中和这类依赖细致接触调整的任务上都有明显优势。论文给出的解读也很直接:大规模人类第一视角预训练提供了广泛的视觉运动先验,而触觉同步中期训练与异步高频修正,才让这些先验真正适配到接触丰富双手操作。
如果把全部触觉输入去掉,平均成功率从 65% 掉到 42%,相当于下降 23%。如果只保留较轻量的 MLP 力觉编码加形变图,成绩是 58%;只用形变图是 54%;只用力觉相关表示是 59%。这说明时间力觉和空间形变各自都有效,二者合起来最好。作者提出的 VQ-VAE 力觉编码,不是唯一贡献来源,但确实提供了更完整的高频触觉表示。
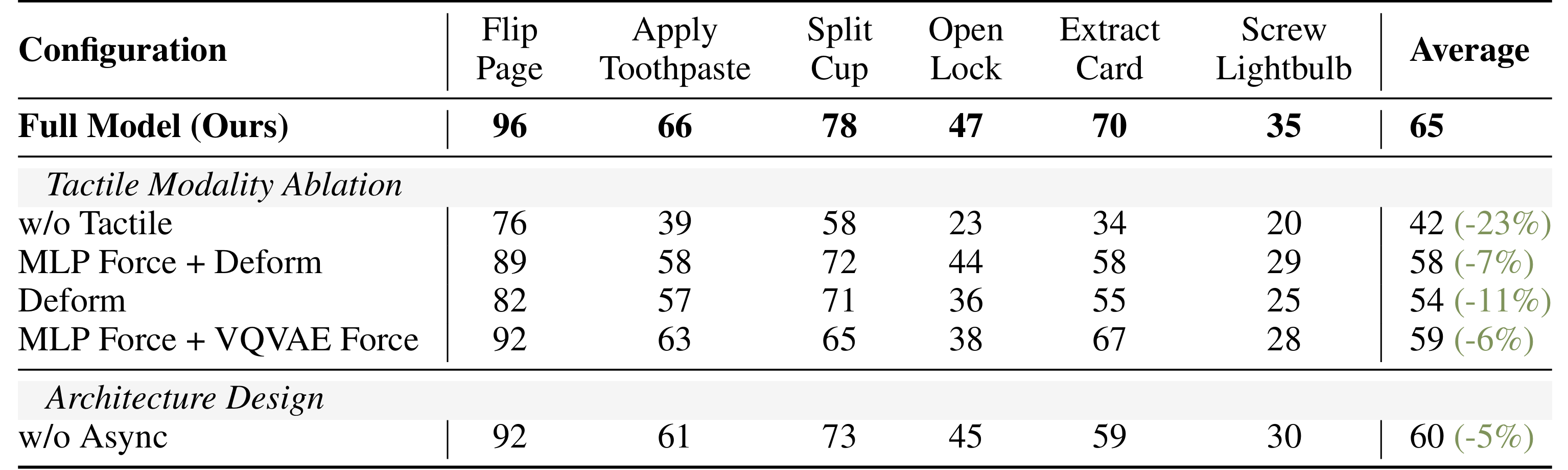
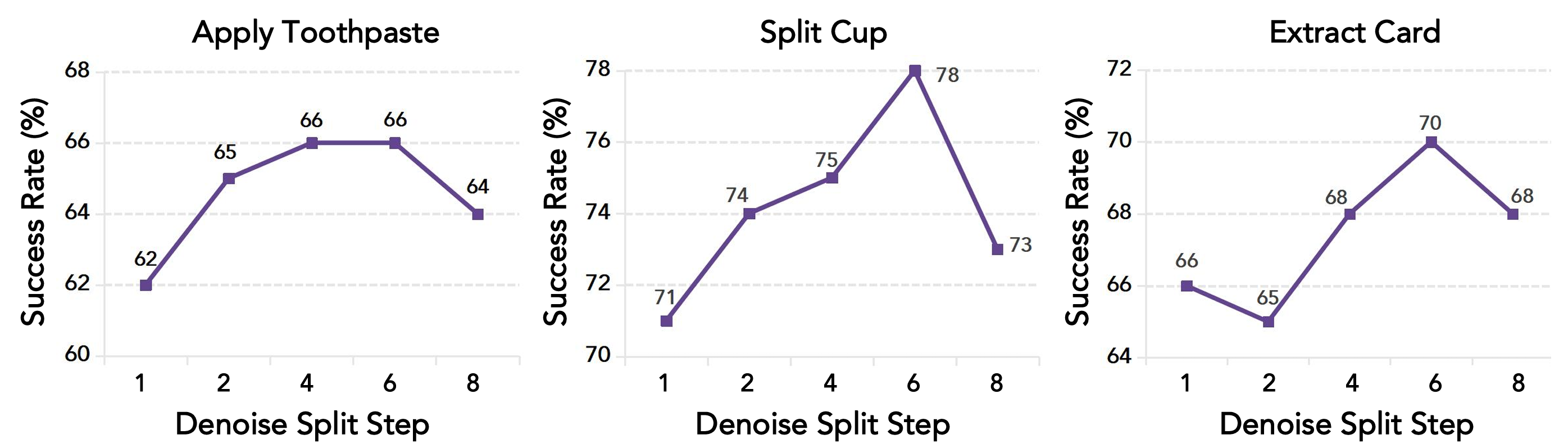
去掉异步后,平均成绩从 65% 降到 60%。同时,作者还扫了不同的分界步数,发现中间分界最优:分得太早,action expert 给后续修正留下的视觉动作先验不够;分得太晚,tactile expert 能参与修正的空间又太小。
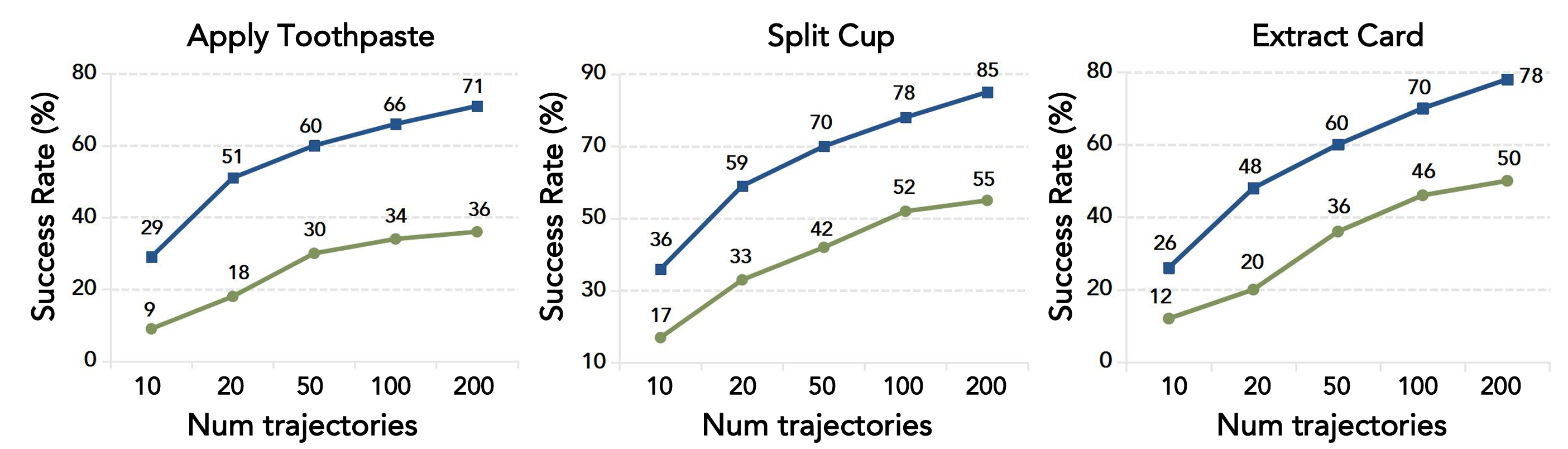
研究团队把 T-Rex 数据集与一个同样 100 小时、但来自 11 个任务专用采集的数据集做比较。结果很清楚:按动作原语和物体交互组织的中期训练数据,泛化更强,零样本迁移也更好。在后训练任务上,T-Rex 数据集版在 6 个代表任务里都领先;在零样本任务上,优势更明显,例如 Pick Cube 达到 45%,而任务专用数据中期训练只有 15%,没有中期训练则是 5%。
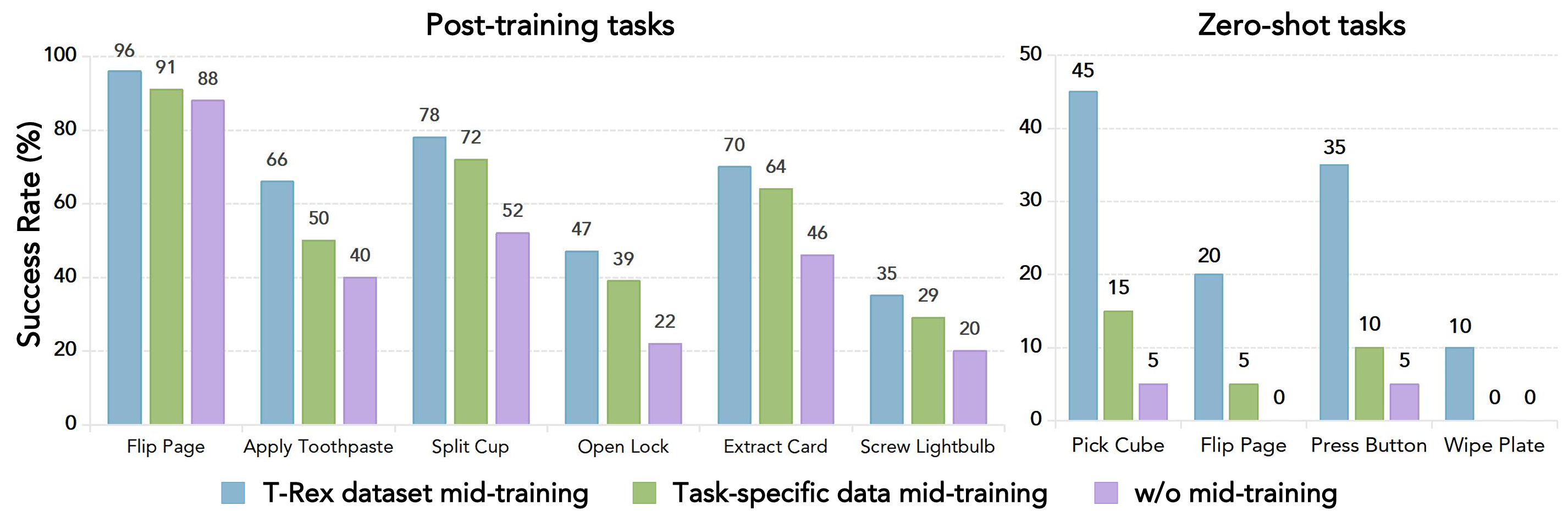
这套配方的收益还能从训练流程消融里再看一遍。完全不做大规模预训练也不做触觉中期训练时,6 个代表任务平均成功率只有 18%;只做触觉中期训练是 34%;只做大规模预训练是 45%;两者都做则达到 65%。这组数字很有说服力,因为它把三阶段路线里每一段的作用分开了:第一视角预训练负责提供广泛先验,触觉中期训练负责把这些先验真正落到机器人可执行的接触控制上。

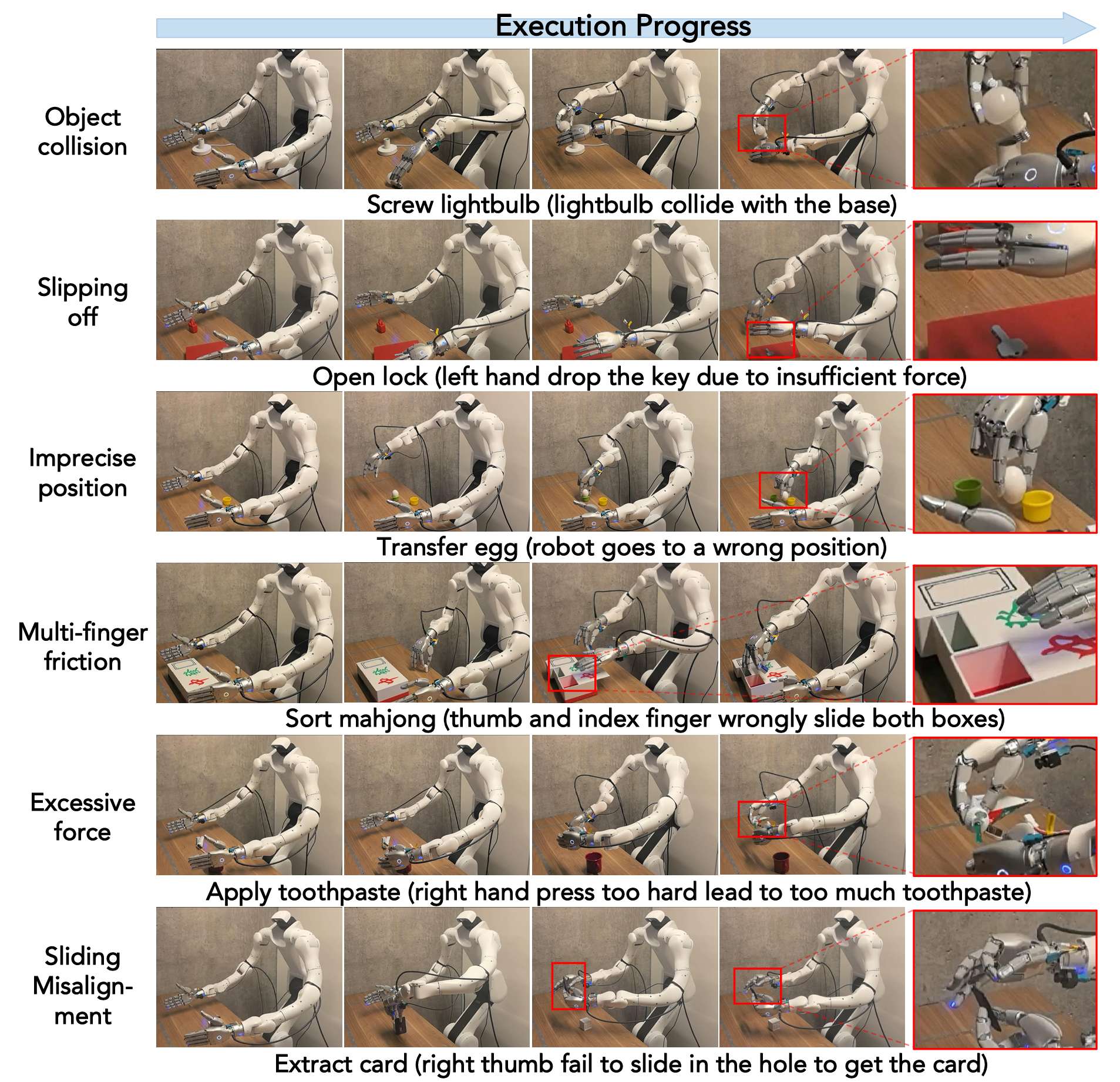
最后还专门分析了失败案例。比较典型的几类问题包括:灯泡任务里的物体碰撞、开锁任务里的抓取滑脱、转移鸡蛋时的定位不准、麻将盒任务里的多指摩擦干扰、挤牙膏时用力过大,以及取卡任务里的滑动错位。作者据此给出的局限性也比较坦诚:一方面,长程任务里如果接触协调非常精细、遥操作采集又困难,后续可能还需要强化学习或在线交互修正;另一方面,触觉反应能力目前仍受硬件限制,包括传感器畸变、设备间标定漂移,以及缺少更密集的手掌触觉。
写在最后
T-Rex 的核心贡献,可以概括成三件事:一套 100 小时、围绕动作原语组织的触觉同步双手操作数据;一套把低频动作规划与高频触觉修正拆开的 MoT 架构;以及一条把大规模第一视角预训练、触觉中期训练和任务微调连起来的训练路线。
我觉得文中最有分量的结论有两个。第一,触觉确实不能只当成一个额外输入通道随手接进预训练 VLA ;第二,触觉中期训练数据如果按"物体-动作原语"来组织,收益并不局限在训练过的具体任务上,它还会影响后续微调效率和零样本迁移能力。
通过这篇工作和一些近期的工作,可以看到触觉方案正在走向成熟。
如果顺着这条线往后看,我觉得触觉方案接下来大概率会有三个变化。
第一,触觉会逐渐进入基础模型,而不是少数接触任务才临时外挂的模态;尤其到了 humanoid 和双手系统里,只靠视觉很难覆盖插入、滑动、旋拧、挤压这类动作。
第二,触觉数据的组织方式会继续从任务堆砌转向更可复用的交互单元,T-Rex 这种"物体-动作原语"的思路很可能会被保留下来,再往上接到更大范围的整机数据与评测体系里。
第三,真正限制上限的部分会逐渐从模型转到稳定硬件、统一表示和低成本采集流水线,因为传感器漂移、标定一致性、手掌级稠密触觉和多指协调,都会直接决定这些模型能不能从演示走向长期部署。
重磅!
全网首个!具身智能开源知识库来啦(技术/产业/投融资/上下游)
推荐阅读
我们用低成本的机械臂完成pi0/pi0.5/GR00T/世界模型等VLA任务~
VLA+RL方向首个系统教程来啦!Online RL/Offline RL/test time RL等~
VLA/VLA+触觉/VLA+RL/具身世界模型等!具身大脑+小脑算法与实战全栈路线来啦~