摘要
多传感器融合 SLAM 方案众多,但几乎都绑定特定传感器组合:VINS 只做视觉惯性,LIO-SAM 只支持激光 IMU,跨平台切换就得重写状态变量和因子图。Ultra-Fusion 提出统一滑动窗口估计器,将激光、视觉、IMU、轮速、GNSS 五类残差放进同一个优化窗口,配合因子级可靠性调度(FRS)和在线时空自校准(OSC),在自动驾驶、仓储机器人、四足配送、无人机巡检四类平台上均完成验证,5 大公开数据集对比 60+ 开源系统全部达到 SOTA。
项目主页 :ultrafusion-web
数据集 :M3DGR
一、问题背景:为什么需要"大一统"?
现有多传感器 SLAM 框架面临三大痛点:
| 痛点 | 具体表现 | 代表方案 |
|---|---|---|
| 传感器绑定 | 方案只支持固定传感器组合,增减一个传感器就要重写 | VINS-Mono (V+I), LIO-SAM (L+I), FAST-LIVO (L+V+I) |
| 退化脆弱 | 隧道 GNSS 丢失、暗光相机失效、狭长走廊激光退化,一碰就崩 | 多数方案无退化检测或仅前端简单过滤 |
| 外参/时序漂移 | 长时间运行后标定参数偏移,误差持续累积 | 多数方案依赖离线标定,不支持在线修正 |
Ultra-Fusion 的核心思路:一套后端兼容所有模态,内置退化调度 + 在线校准,跨平台免改代码。
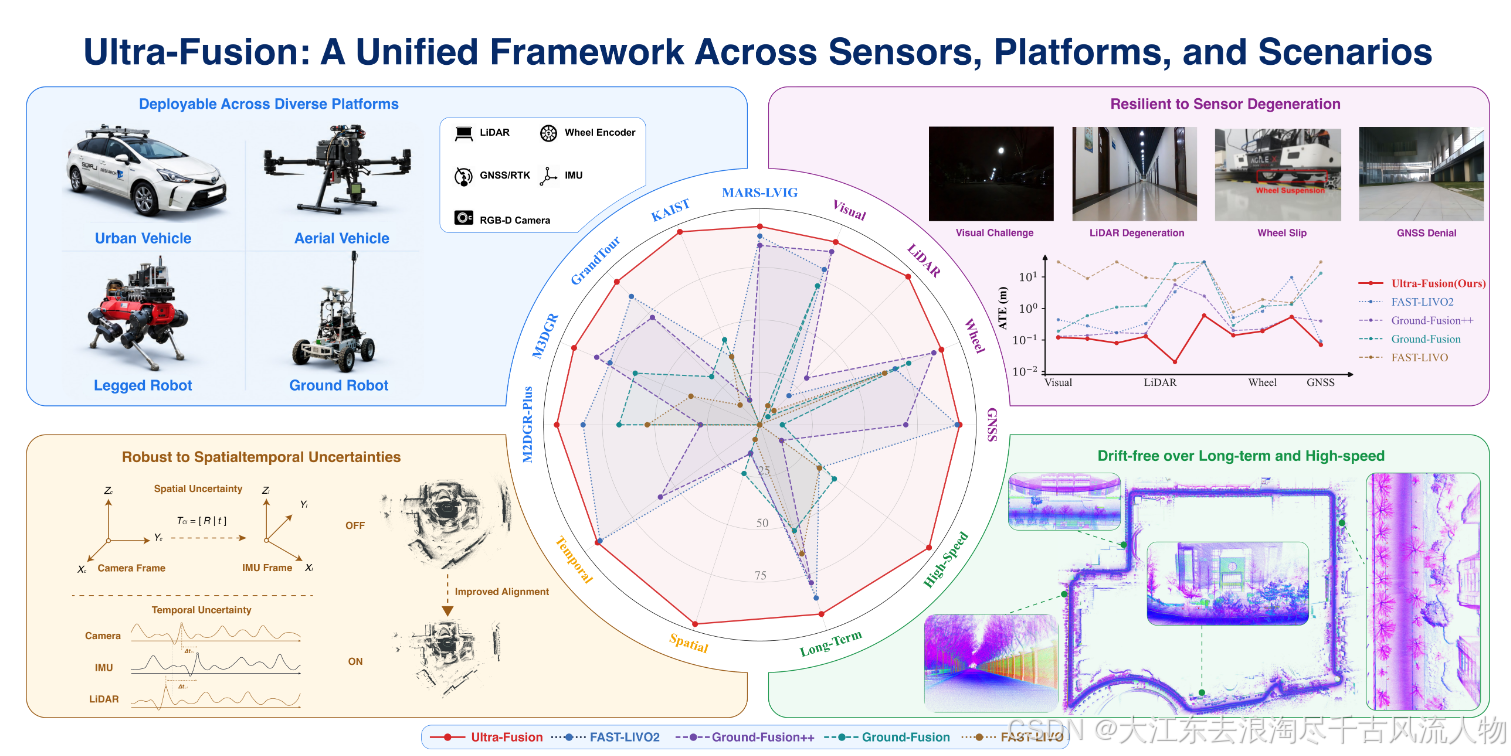
图 0:Ultra-Fusion 多平台部署总览 -- 一套代码适配轮式、四足、无人机三类移动平台。来源:Ultra-Fusion Fig 1
二、核心方法
2.1 整体框架:统一滑动窗口估计器
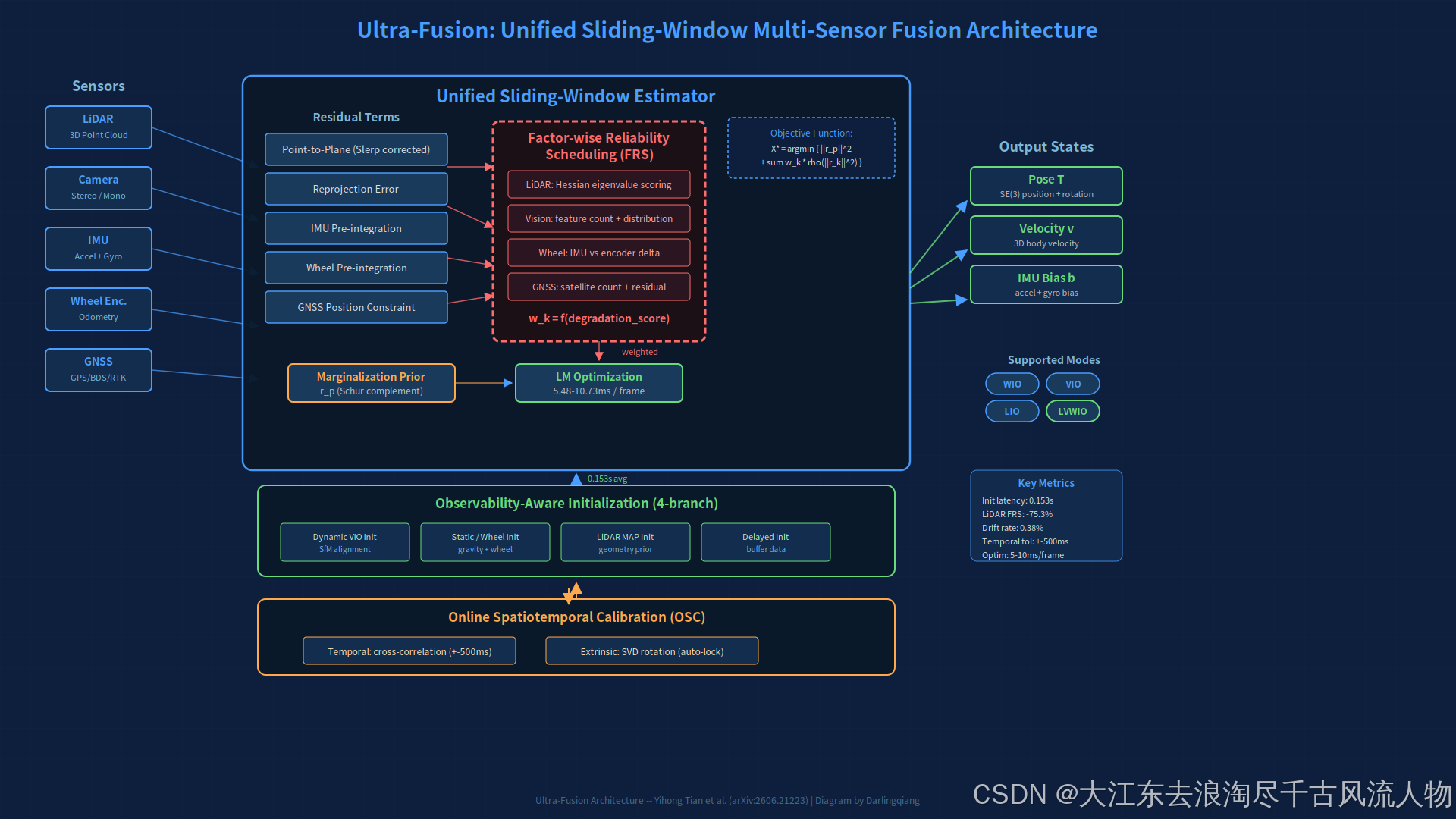
图 1:Ultra-Fusion 整体架构 -- 五类传感器观测统一进入滑动窗口,由 FRS 动态调权,OSC 在线校准时空参数。重绘自 design skill
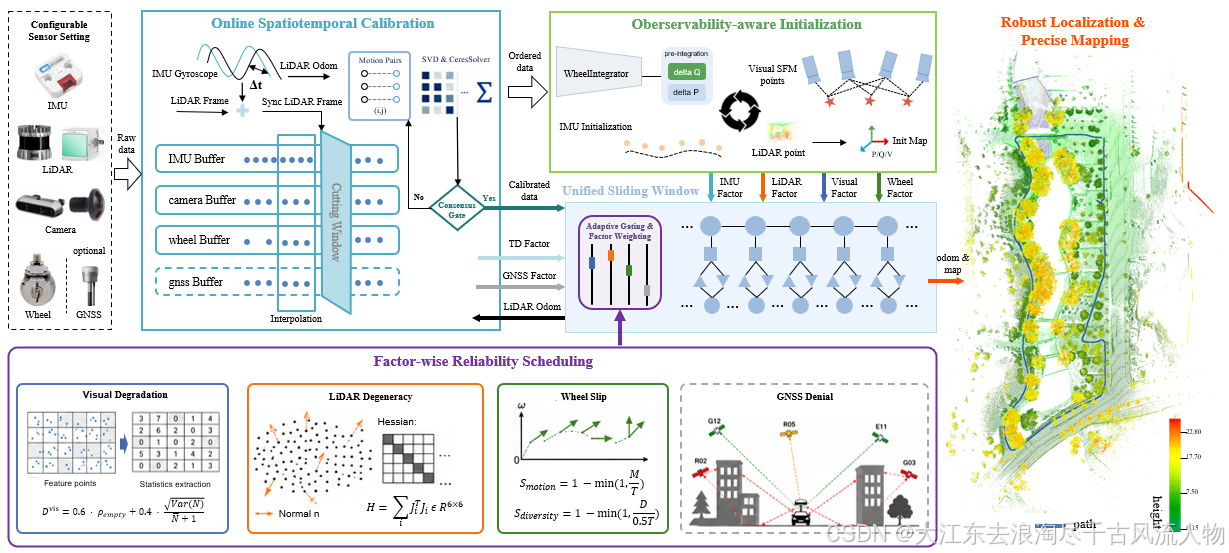
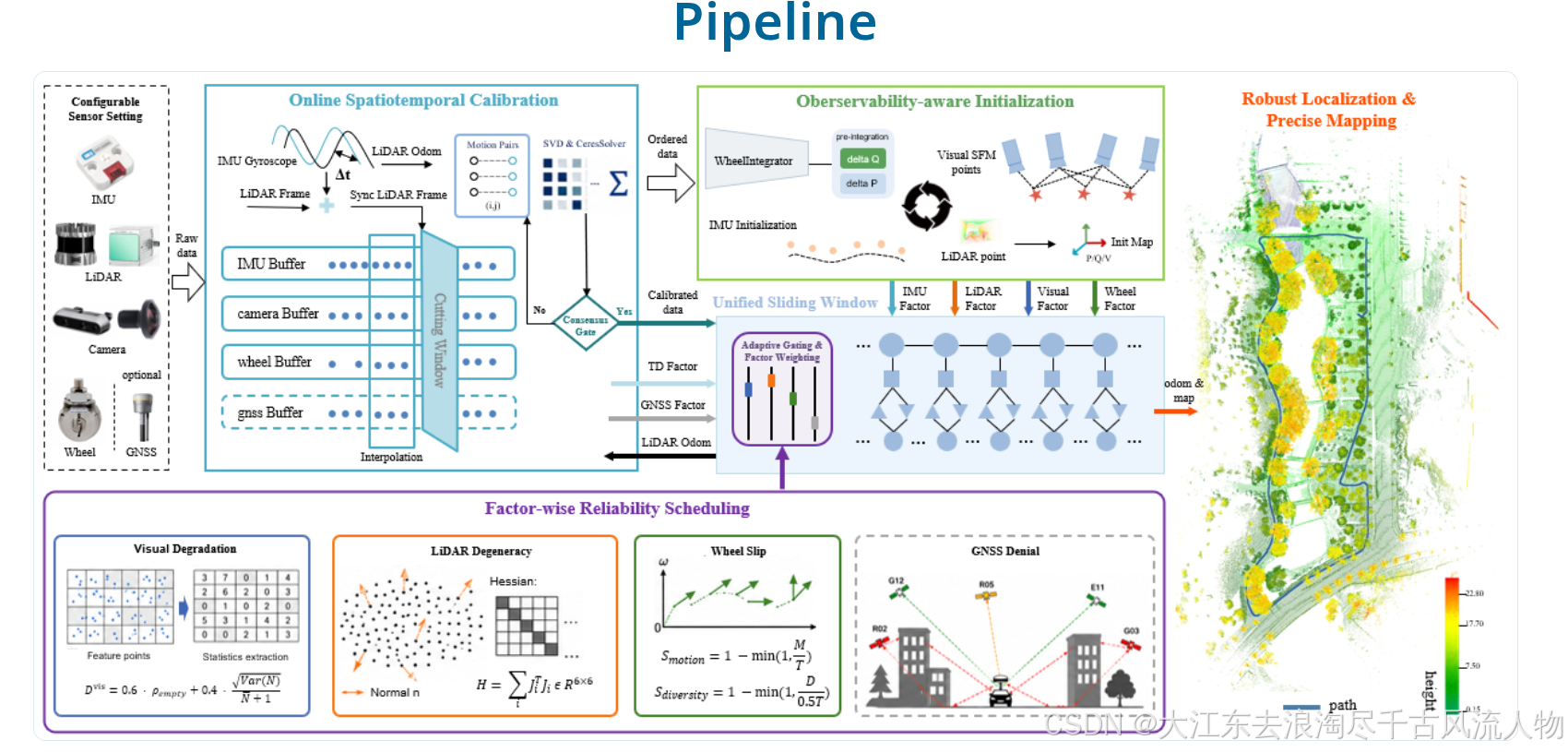
图 3:Ultra-Fusion 完整系统流程图 -- 展示从传感器原始数据到统一估计器的完整数据流。来源:Ultra-Fusion Pipeline Figure
传统方案把激光里程计、视觉里程计当作外部先验塞进优化窗口,本质是二次信息压缩,丢失原始观测的精细约束。Ultra-Fusion 直接将五类原始残差放入同一窗口:
- 激光:点到平面残差(Slerp 球面插值校正扫描内运动畸变)
- 视觉:重投影残差
- IMU:预积分残差
- 轮速:轮速预积分残差
- GNSS:位置约束
优化目标统一为:
X ∗ = arg min X { ∥ r p ∥ 2 + ∑ k w k ⋅ ρ ( ∥ r k ∥ Σ k 2 ) } \mathcal{X}^* = \arg\min_{\mathcal{X}} \left\{ \|\mathbf{r}p\|^2 + \sum{k} w_k \cdot \rho\!\left(\|\mathbf{r}k\|^2{\Sigma_k}\right) \right\} X∗=argXmin{∥rp∥2+k∑wk⋅ρ(∥rk∥Σk2)}
其中 X \mathcal{X} X 为窗口内所有状态(位姿、速度、IMU 零偏), r p \mathbf{r}_p rp 为边缘化先验残差, r k \mathbf{r}_k rk 为各传感器残差, w k w_k wk 由 FRS 动态分配, ρ ( ⋅ ) \rho(\cdot) ρ(⋅) 为鲁棒核函数。
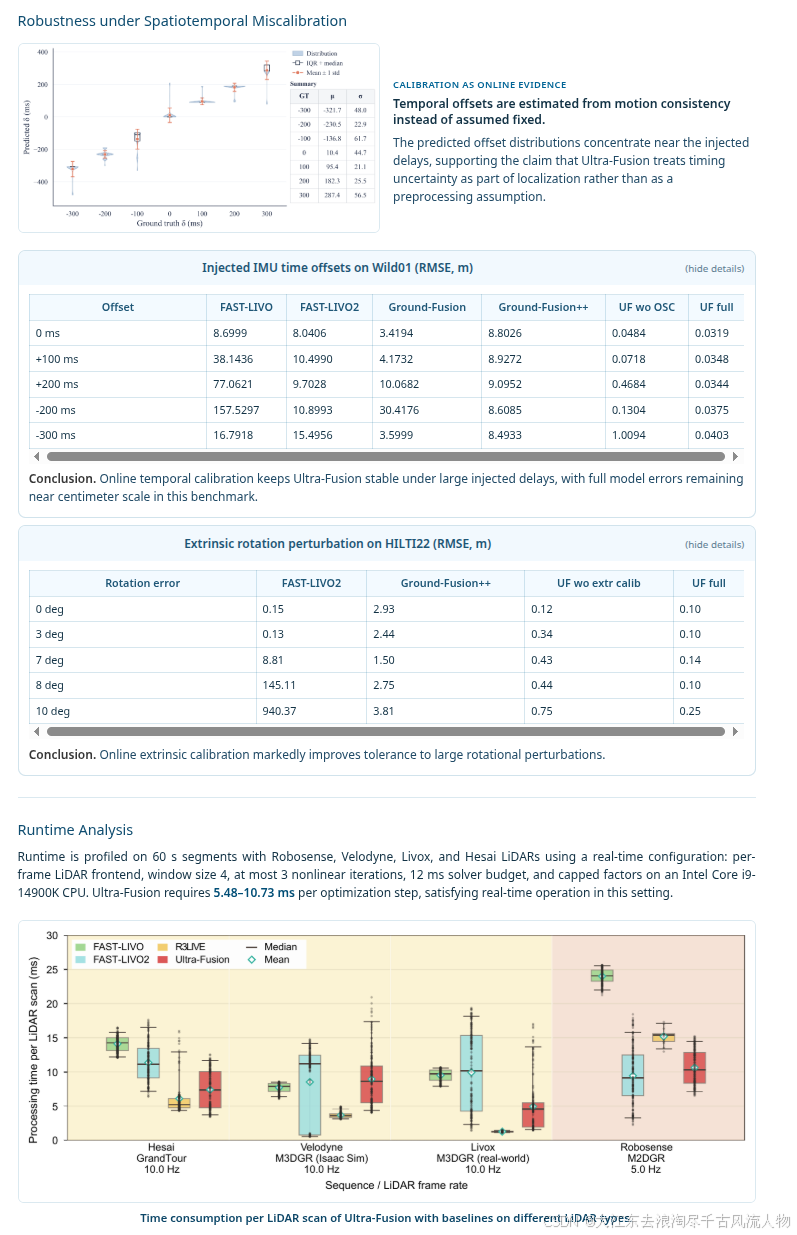
无论启用 WIO、VIO、LIO 还是 LVWIO,优化目标形式完全一致,仅增减残差项。单帧优化耗时 5.48-10.73ms(i9-14900K),满足实时。
2.2 可观测性自适应初始化
传统 SLAM 初始化固定流程:静止等待重力对齐或依赖充足视觉特征,在无光/无几何场景下初始化动辄数秒。
Ultra-Fusion 设计四分支启动逻辑,系统自动选择:
#mermaid-svg-gNKPkattRfzO8Azr{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}@keyframes edge-animation-frame{from{stroke-dashoffset:0;}}@keyframes dash{to{stroke-dashoffset:0;}}#mermaid-svg-gNKPkattRfzO8Azr .edge-animation-slow{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 50s linear infinite;stroke-linecap:round;}#mermaid-svg-gNKPkattRfzO8Azr .edge-animation-fast{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 20s linear infinite;stroke-linecap:round;}#mermaid-svg-gNKPkattRfzO8Azr .error-icon{fill:#552222;}#mermaid-svg-gNKPkattRfzO8Azr .error-text{fill:#552222;stroke:#552222;}#mermaid-svg-gNKPkattRfzO8Azr .edge-thickness-normal{stroke-width:1px;}#mermaid-svg-gNKPkattRfzO8Azr .edge-thickness-thick{stroke-width:3.5px;}#mermaid-svg-gNKPkattRfzO8Azr .edge-pattern-solid{stroke-dasharray:0;}#mermaid-svg-gNKPkattRfzO8Azr .edge-thickness-invisible{stroke-width:0;fill:none;}#mermaid-svg-gNKPkattRfzO8Azr .edge-pattern-dashed{stroke-dasharray:3;}#mermaid-svg-gNKPkattRfzO8Azr .edge-pattern-dotted{stroke-dasharray:2;}#mermaid-svg-gNKPkattRfzO8Azr .marker{fill:#333333;stroke:#333333;}#mermaid-svg-gNKPkattRfzO8Azr .marker.cross{stroke:#333333;}#mermaid-svg-gNKPkattRfzO8Azr svg{font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;}#mermaid-svg-gNKPkattRfzO8Azr p{margin:0;}#mermaid-svg-gNKPkattRfzO8Azr .label{font-family:"trebuchet ms",verdana,arial,sans-serif;color:#333;}#mermaid-svg-gNKPkattRfzO8Azr .cluster-label text{fill:#333;}#mermaid-svg-gNKPkattRfzO8Azr .cluster-label span{color:#333;}#mermaid-svg-gNKPkattRfzO8Azr .cluster-label span p{background-color:transparent;}#mermaid-svg-gNKPkattRfzO8Azr .label text,#mermaid-svg-gNKPkattRfzO8Azr span{fill:#333;color:#333;}#mermaid-svg-gNKPkattRfzO8Azr .node rect,#mermaid-svg-gNKPkattRfzO8Azr .node circle,#mermaid-svg-gNKPkattRfzO8Azr .node ellipse,#mermaid-svg-gNKPkattRfzO8Azr .node polygon,#mermaid-svg-gNKPkattRfzO8Azr .node path{fill:#ECECFF;stroke:#9370DB;stroke-width:1px;}#mermaid-svg-gNKPkattRfzO8Azr .rough-node .label text,#mermaid-svg-gNKPkattRfzO8Azr .node .label text,#mermaid-svg-gNKPkattRfzO8Azr .image-shape .label,#mermaid-svg-gNKPkattRfzO8Azr .icon-shape .label{text-anchor:middle;}#mermaid-svg-gNKPkattRfzO8Azr .node .katex path{fill:#000;stroke:#000;stroke-width:1px;}#mermaid-svg-gNKPkattRfzO8Azr .rough-node .label,#mermaid-svg-gNKPkattRfzO8Azr .node .label,#mermaid-svg-gNKPkattRfzO8Azr .image-shape .label,#mermaid-svg-gNKPkattRfzO8Azr .icon-shape .label{text-align:center;}#mermaid-svg-gNKPkattRfzO8Azr .node.clickable{cursor:pointer;}#mermaid-svg-gNKPkattRfzO8Azr .root .anchor path{fill:#333333!important;stroke-width:0;stroke:#333333;}#mermaid-svg-gNKPkattRfzO8Azr .arrowheadPath{fill:#333333;}#mermaid-svg-gNKPkattRfzO8Azr .edgePath .path{stroke:#333333;stroke-width:2.0px;}#mermaid-svg-gNKPkattRfzO8Azr .flowchart-link{stroke:#333333;fill:none;}#mermaid-svg-gNKPkattRfzO8Azr .edgeLabel{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-gNKPkattRfzO8Azr .edgeLabel p{background-color:rgba(232,232,232, 0.8);}#mermaid-svg-gNKPkattRfzO8Azr .edgeLabel rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-gNKPkattRfzO8Azr .labelBkg{background-color:rgba(232, 232, 232, 0.5);}#mermaid-svg-gNKPkattRfzO8Azr .cluster rect{fill:#ffffde;stroke:#aaaa33;stroke-width:1px;}#mermaid-svg-gNKPkattRfzO8Azr .cluster text{fill:#333;}#mermaid-svg-gNKPkattRfzO8Azr .cluster span{color:#333;}#mermaid-svg-gNKPkattRfzO8Azr div.mermaidTooltip{position:absolute;text-align:center;max-width:200px;padding:2px;font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:12px;background:hsl(80, 100%, 96.2745098039%);border:1px solid #aaaa33;border-radius:2px;pointer-events:none;z-index:100;}#mermaid-svg-gNKPkattRfzO8Azr .flowchartTitleText{text-anchor:middle;font-size:18px;fill:#333;}#mermaid-svg-gNKPkattRfzO8Azr rect.text{fill:none;stroke-width:0;}#mermaid-svg-gNKPkattRfzO8Azr .icon-shape,#mermaid-svg-gNKPkattRfzO8Azr .image-shape{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-gNKPkattRfzO8Azr .icon-shape p,#mermaid-svg-gNKPkattRfzO8Azr .image-shape p{background-color:rgba(232,232,232, 0.8);padding:2px;}#mermaid-svg-gNKPkattRfzO8Azr .icon-shape .label rect,#mermaid-svg-gNKPkattRfzO8Azr .image-shape .label rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-gNKPkattRfzO8Azr .label-icon{display:inline-block;height:1em;overflow:visible;vertical-align:-0.125em;}#mermaid-svg-gNKPkattRfzO8Azr .node .label-icon path{fill:currentColor;stroke:revert;stroke-width:revert;}#mermaid-svg-gNKPkattRfzO8Azr :root{--mermaid-font-family:"trebuchet ms",verdana,arial,sans-serif;} 是
否
是
否
是
否
是
否
传感器数据流入
运动激励充足?
视觉特征充足?
有轮速/IMU?
动态视觉惯性初始化
SfM对齐
激光有效点充足?
静止/轮速辅助初始化
延迟初始化
缓存数据等待
激光辅助MAP初始化
实验数据(18 组跨数据集序列):
| 指标 | Ultra-Fusion | FAST-LIVO2 | Ground-Fusion++ |
|---|---|---|---|
| 平均初始化延迟 | 0.153s | 4.642s | -- |
| 20s 短时轨迹误差 | 0.483m | -- | -- |
关闭自适应模块后延迟飙升至 4.6s,误差扩大数十倍。
2.3 因子级可靠性调度(FRS)
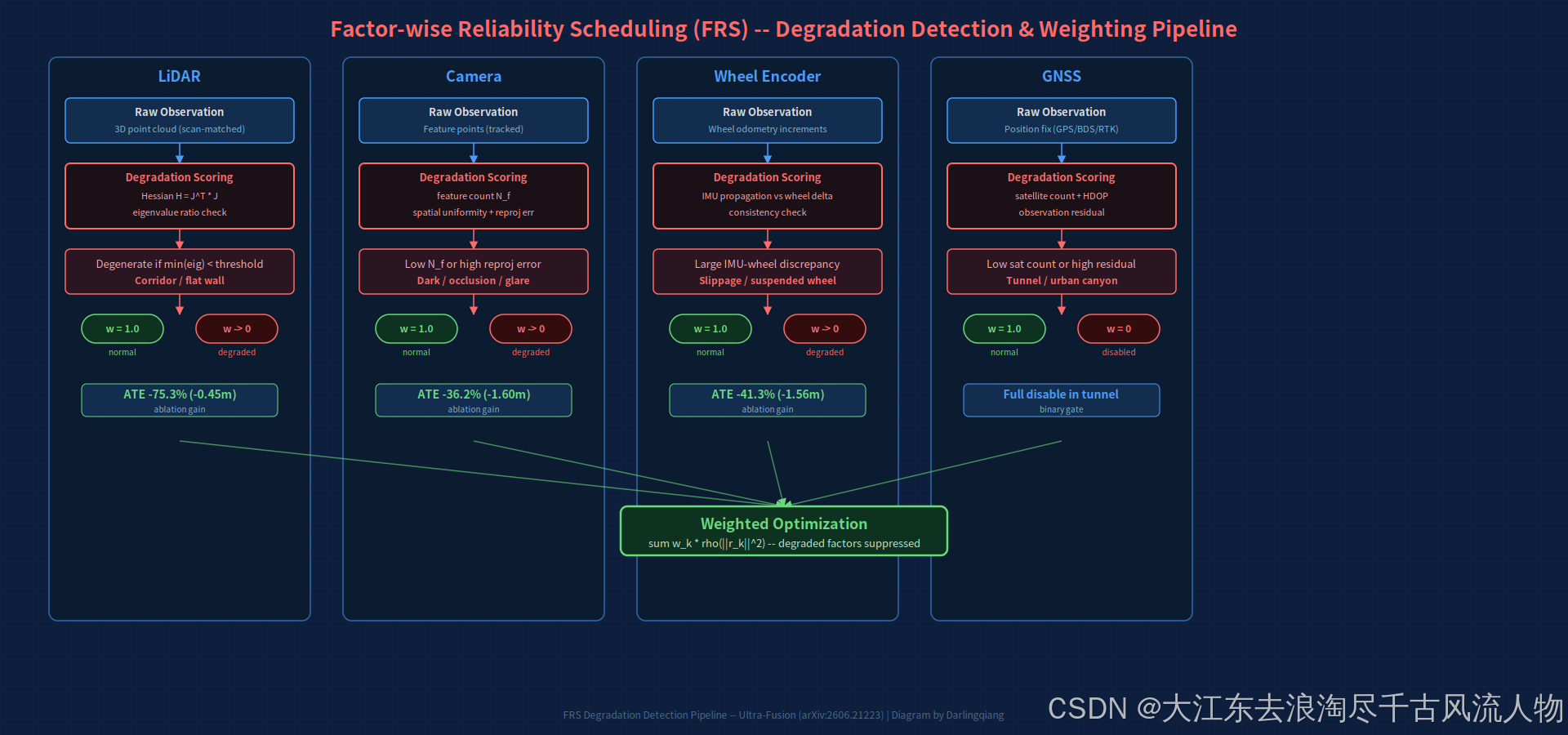
图 2:FRS 因子级退化调度流程 -- 每类传感器独立计算退化分数,动态调整残差权重 w_k,退化严重时权重趋零。重点看各传感器的评分指标差异和消融收益。重绘自 design skill
这是论文最核心的创新。区别于传统前端简单过滤,FRS 在后端层面为五类传感器分别设计退化评分,实时调权:
| 传感器 | 退化打分方式 | 退化场景 |
|---|---|---|
| 激光 | Hessian 矩阵特征值 → 几何丰富度 | 狭长走廊、单一平面 |
| 视觉 | 有效特征数 + 空间分布均匀度 + 重投影误差 | 暗光、遮挡 |
| 轮速 | IMU 推算 vs 轮速增量差值 | 草地打滑、车轮悬空 |
| GNSS | 卫星数量 + 定位精度 + 残差 | 隧道、城市峡谷 |
| IMU | 零偏漂移监测 | 长时间静止 |
消融实验收益:
| FRS 模块 | 退化场景误差降低 |
|---|---|
| 激光 FRS | -75.3%(-0.45m ATE) |
| 视觉 FRS | -36.2%(-1.60m ATE) |
| 轮速 FRS | -41.3%(-1.56m ATE) |
2.4 在线时空自校准(OSC)
多数在线校准方案的问题:弱激励环境下持续更新参数,反而引入更大偏差。Ultra-Fusion 拆分两条独立校准线程,设置双重准入门槛:
时序校准:互相关匹配 IMU 角速度与激光运动曲线,搜索最优时间偏移。
- 最大支持 ± 500 ms \pm 500\text{ms} ±500ms 偏差修正
- 人为注入 ± 200 ms \pm 200\text{ms} ±200ms 延迟:基线方案误差米级,Ultra-Fusion 维持分米级
- Wild01 序列( ± 300 ms \pm 300\text{ms} ±300ms 偏移):0.0403m RMSE(基线 >15m)
旋转外参校准:SVD 闭式求解旋转矩阵,多轴运动不足时自动锁定外参。
- 注入 10 度旋转误差:HILTI22 上 0.25m(FAST-LIVO2: 940m)
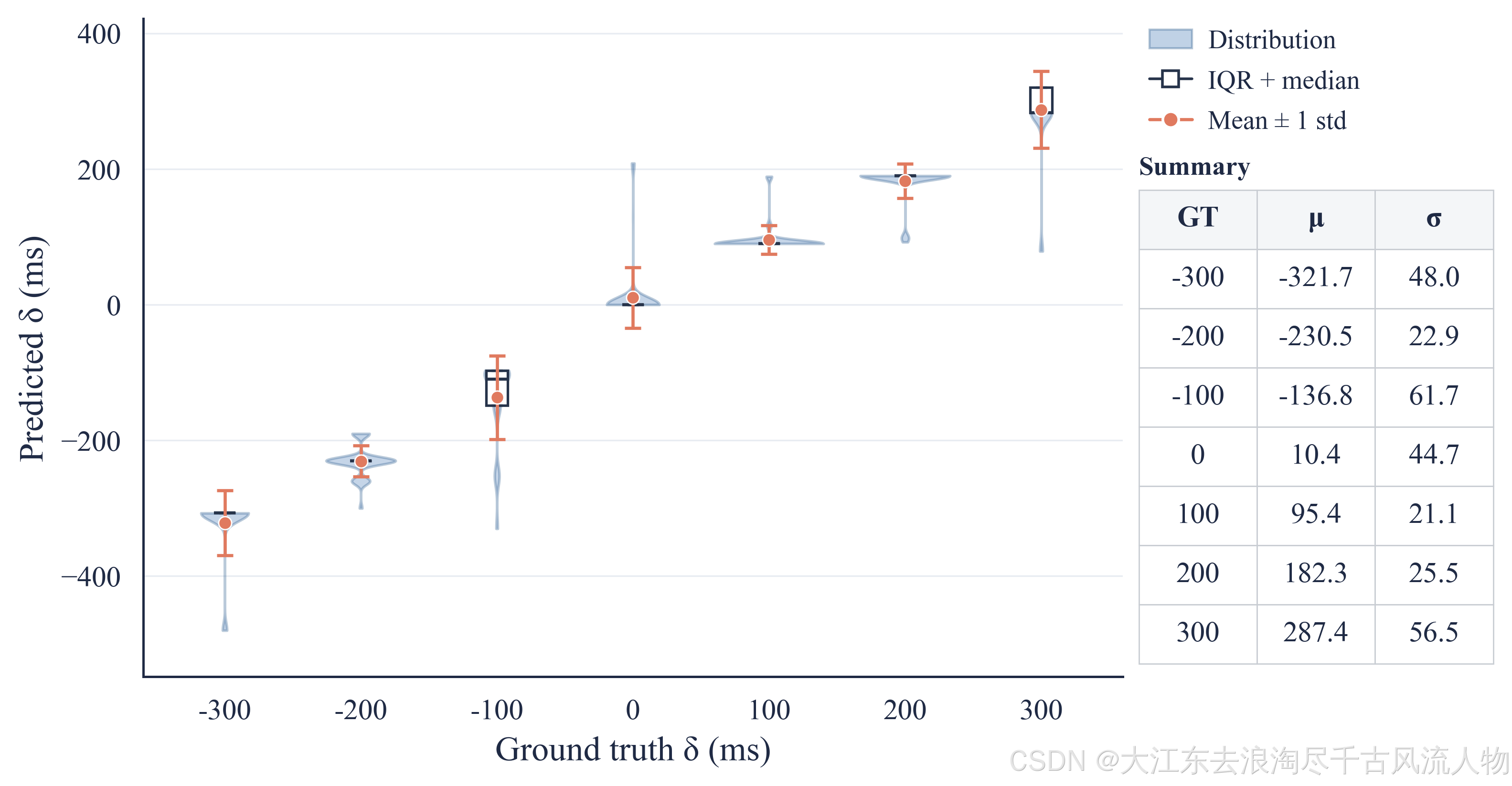
图 5:仿真场景中不同时序偏移注入下的预测值分布 -- 验证 OSC 模块的时序校准精度。来源:Ultra-Fusion Temporal Offsets
校准更新时同步修正全局地图位姿,不产生地图断层。
三、实验分析
3.1 五大 Benchmark 全 SOTA
| 数据集 | 场景 | Ultra-Fusion | 最强对手 |
|---|---|---|---|
| M3DGR(10 序列) | 室内外混合 | 0.15m ATE(rank 1.4) | -- |
| M2DGR-Plus | 校园/城市 | 0.59% 漂移率, 0.24m RMSE | FAST-LIVO2: 2.32%, 1.48m |
| KAIST(96.9km/h 高速) | 城市自动驾驶 | 0.38% 漂移率 | FAST-LIVO2: ~30% |
| GrandTour | 四足机器人 | 0.26-0.90cm RTE(4 序列中 3 个第一) | -- |
| MARS-LVIG | 无人机 | 1.47m RMSE(rank 1.5) | -- |
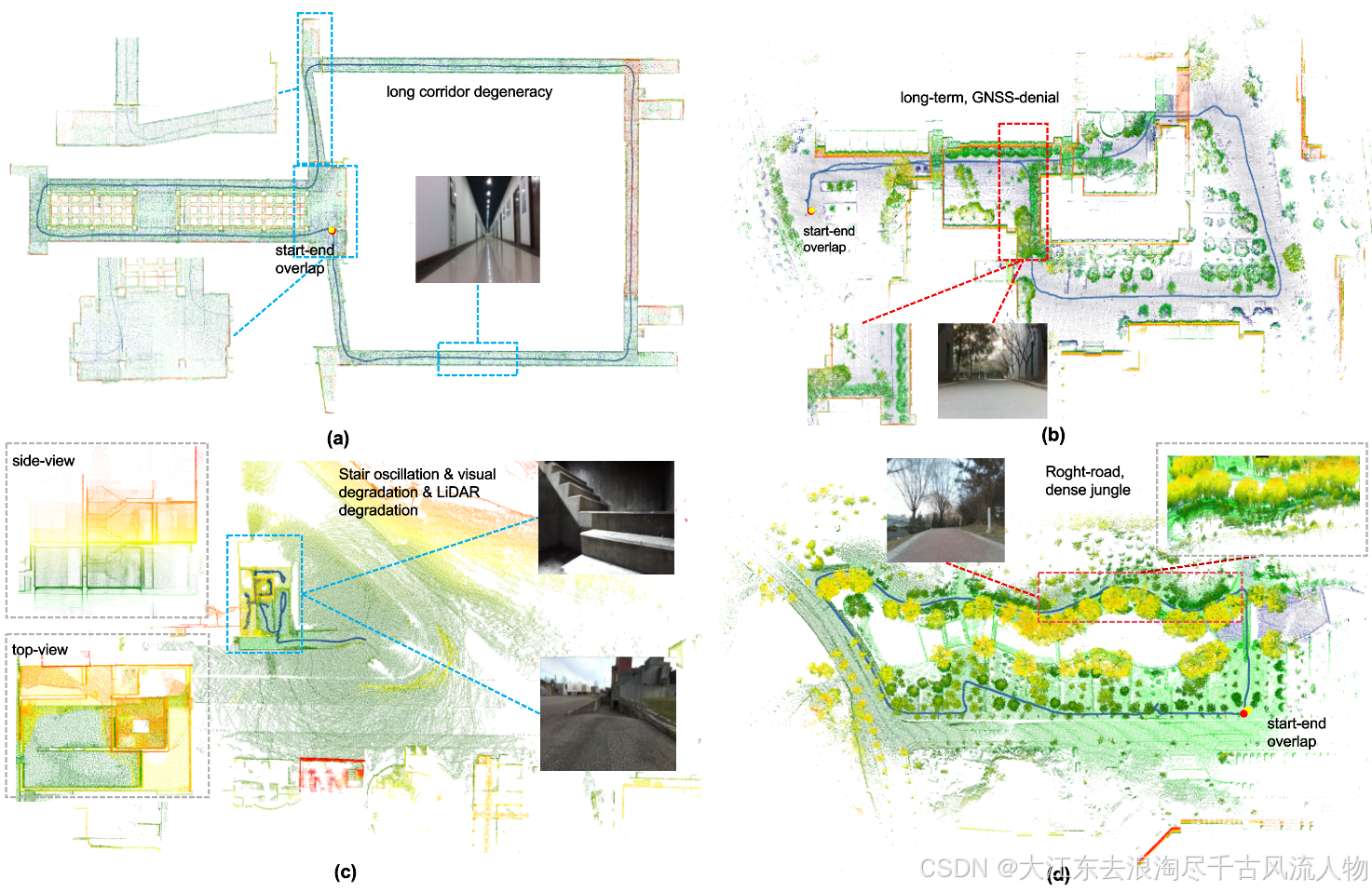
图 4:四类典型传感器退化场景轨迹对比 -- 暗光、走廊、打滑、GNSS 失锁下 Ultra-Fusion vs 基线方案。重点看退化区段的轨迹偏移。来源:Ultra-Fusion Degradation Grid
3.2 跨平台通用性
| 平台 | 传感器配置 | 验证场景 |
|---|---|---|
| 城市自动驾驶 | L+V+I+W+G | KAIST 高速序列(最高 96.9km/h) |
| 园区仓储机器人 | L+V+I+W | 室内外穿越 |
| 四足配送机器人 | L+V+I | 楼梯、颠簸地形(GrandTour) |
| 低空巡检无人机 | L+V+I | 机场远距离(MARS-LVIG) |
同类方案极少同时覆盖地面、足式、空中三类平台。
3.3 关键场景对比
- 高速场景(KAIST 96.9km/h):轮速约束让漂移率从 30% 降至 0.37%
- 激光退化走廊:主流 LIO 误差数米,Ultra-Fusion 靠视觉/IMU 兜底控制在 0.3m 以内
- 30min+ 长时巡航:LVWIO 平均 2.8m(FAST-LIVO2: 8.4m),长期漂移抑制优势明显
四、M3DGR 基准数据集
Ultra-Fusion 团队扩展了 M3DGR 数据集:
- 37 组真实 + 仿真序列(总量 300GB+)
- 覆盖暗光、遮挡、狭长几何、车轮打滑、GNSS 失锁全部典型退化场景
- 仿真序列提供精准真值,可人为控制时序/外参扰动
- 填补了业内缺乏统一退化评测基准的空白
小结
Ultra-Fusion 真正做到了"一套代码通吃所有平台",四大模块各有明确工程价值:
- 统一滑动窗口 -- 消除多子系统信息损耗,增减传感器只改残差项
- 自适应初始化 -- 0.153s 冷启动,比 FAST-LIVO2 快 30 倍
- FRS 退化调度 -- 后端级退化处理,激光退化误差降 75%
- OSC 在线校准 -- 容忍 +/-500ms 时序偏差和 10 度外参误差
客观局限:
- 无语义分割/动态目标剔除,纯静态几何假设
- 无回环检测模块,超长场景仍有累积漂移
- 所有测试基于离线数据集,缺少大规模实车路测
- 代码尚未正式开源(承诺 accepted 后公开)
个人判断:这是 2026 年多传感器融合 SLAM 领域最完整的系统级工作。FRS 因子级退化调度的思路值得所有做多模态融合的团队借鉴 -- 传感器退化不该只在前端做,后端加权才能真正利用冗余信息。但缺少回环和语义仍是硬伤,实际部署需要叠加额外模块。