本质矩阵的几何意义及其性质和分解 - 知乎
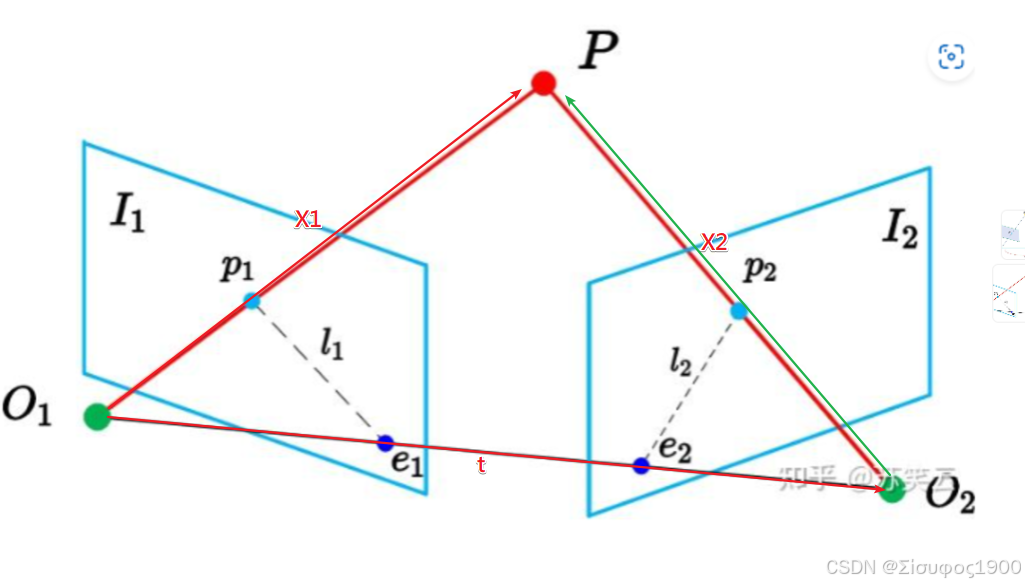
**一、**图中几何元素定义

1、相机与坐标系
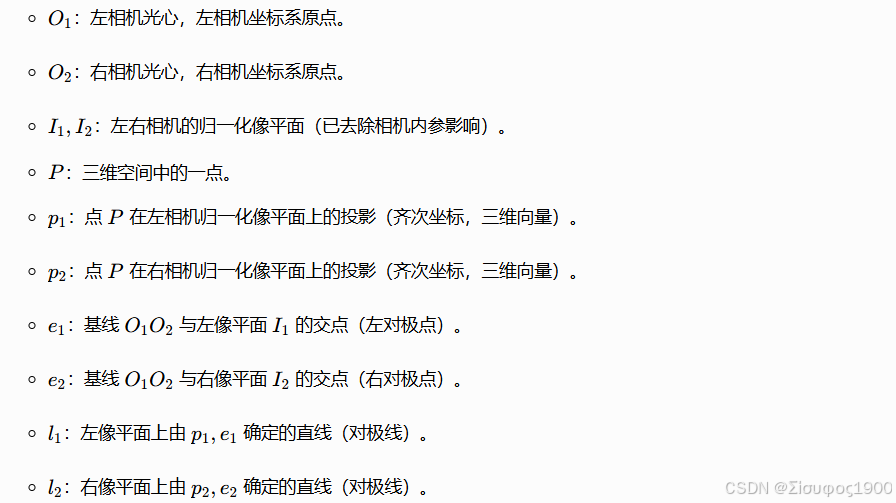
2、关键向量定义
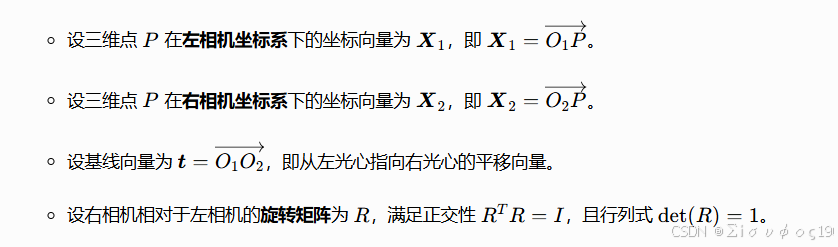
3、刚体变换关系(核心向量等式)
两个相机坐标系之间的刚体变换满足:
那么我们可以用X1 来表示X2
这个公式很重要
这里要补充一下,不然会看不懂 
4、归一化投影关系
三维点与归一化像平面上的投影点满足比例关系:
其中 \(\lambda_1, \lambda_2 > 0\) 是点 P 到两个相机光心的深度(不为零的标量)
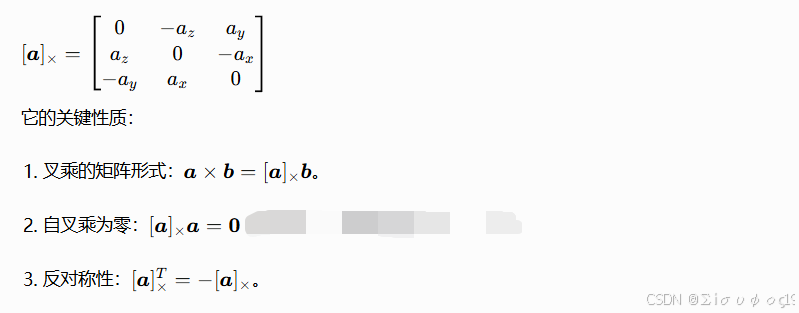
二、叉乘与反对称矩阵
对于任意三维向量 定义其反对称矩阵
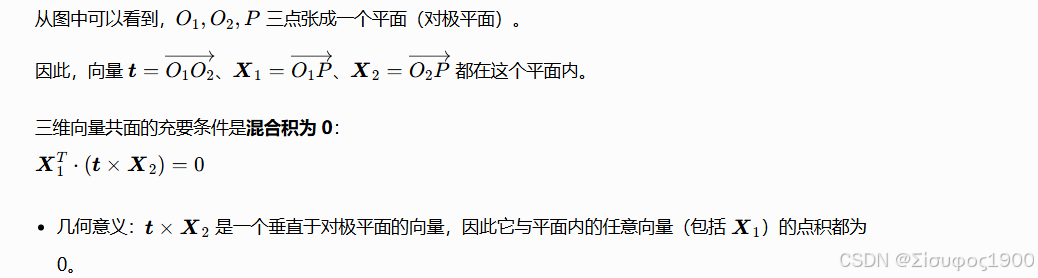
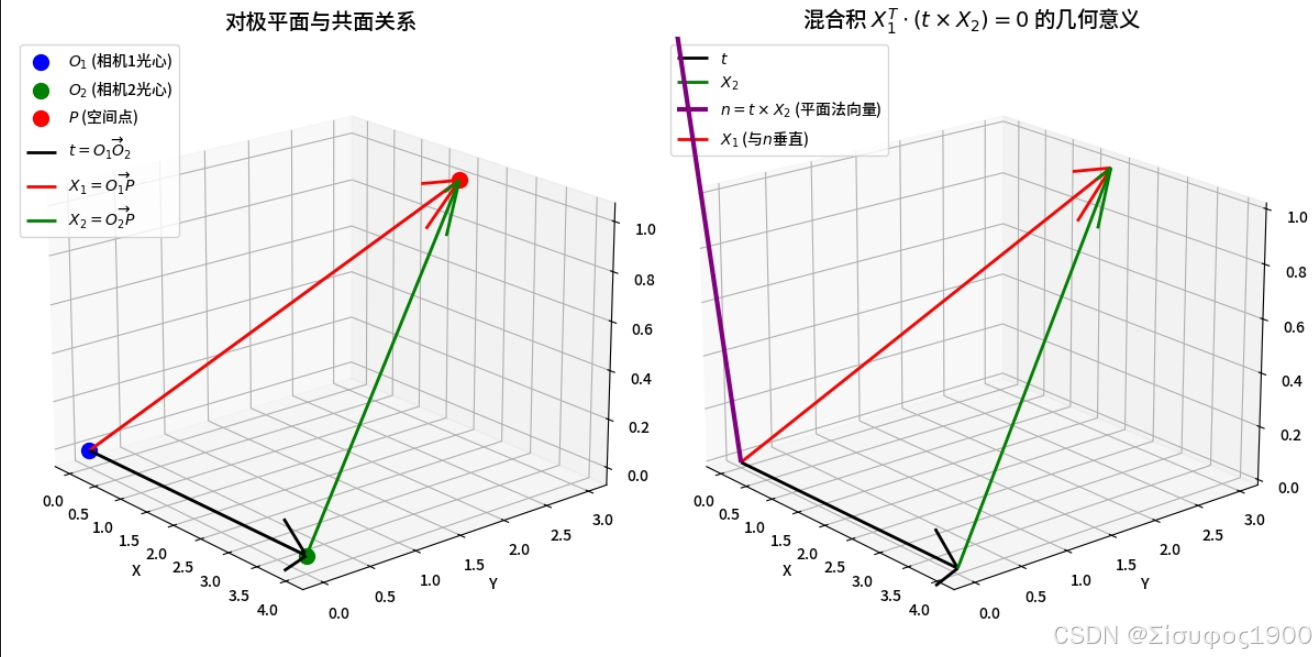
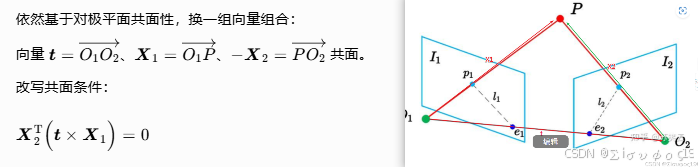
三、几何约束:对极平面的共面条件
四、完整推导:从共面条件到本质矩阵
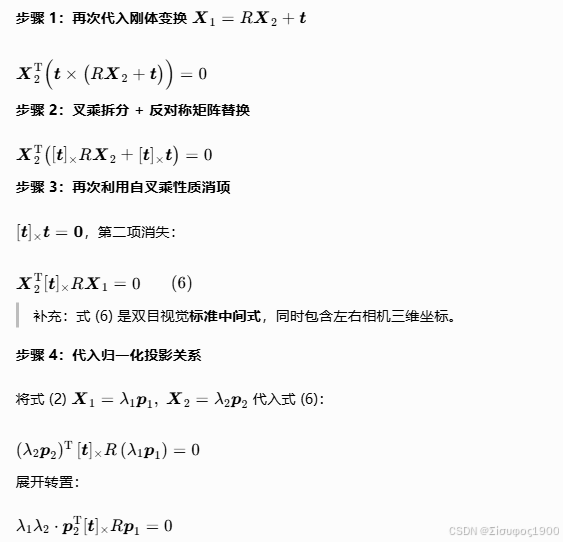
步骤 1:代入刚体变换关系

并将其转化为反对称矩阵

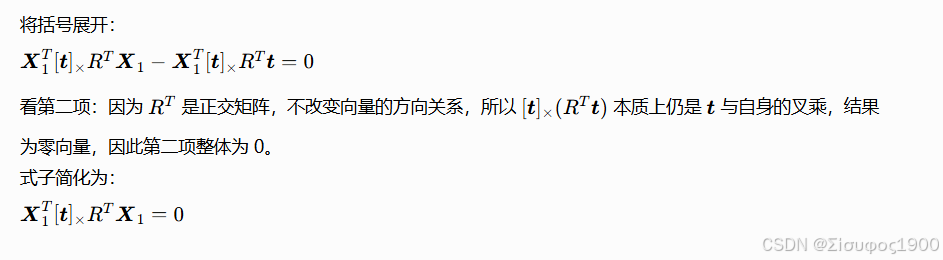
步骤 2:展开并利用自叉乘为零的性质消项
左视角的形式
步骤3:标准跨视图对极约束
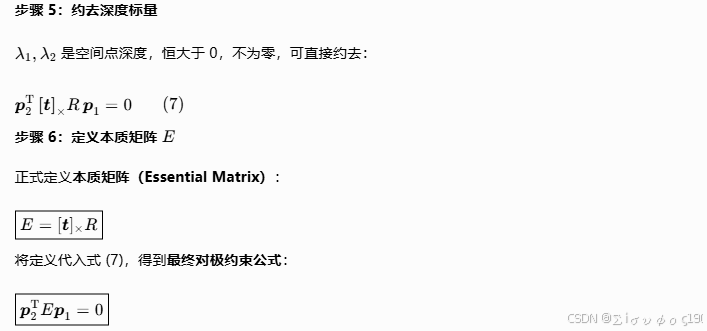
步骤 4:定义本质矩阵 E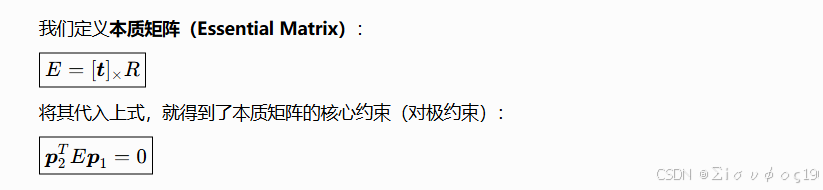
五、八点法求解本质矩阵
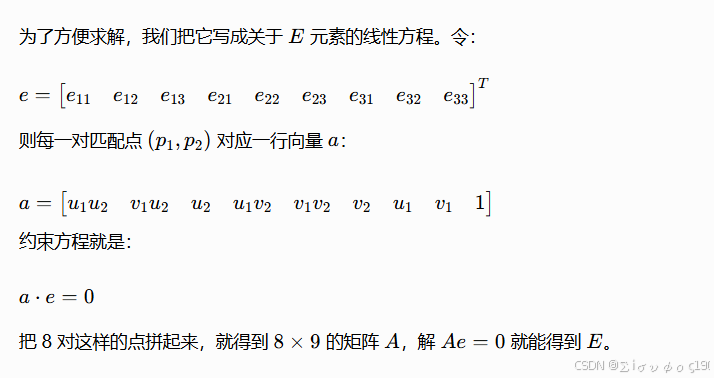
1、将对极约束展开为线性方程
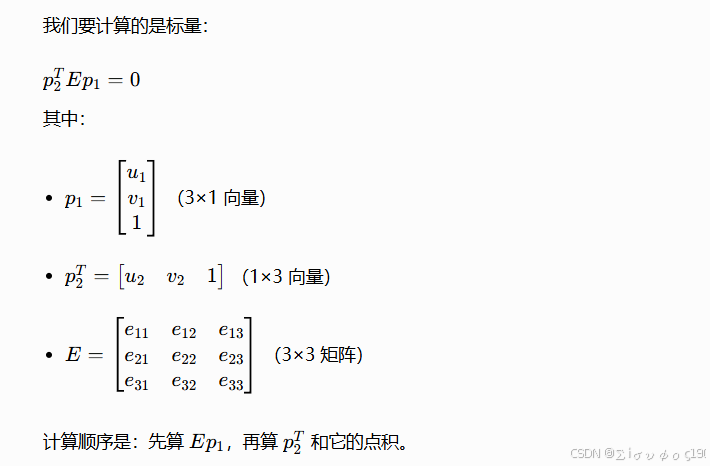
其结果是:

2、构建超定系数矩阵A
为了求解方便我们可以写成矩阵的方式Ae=0:
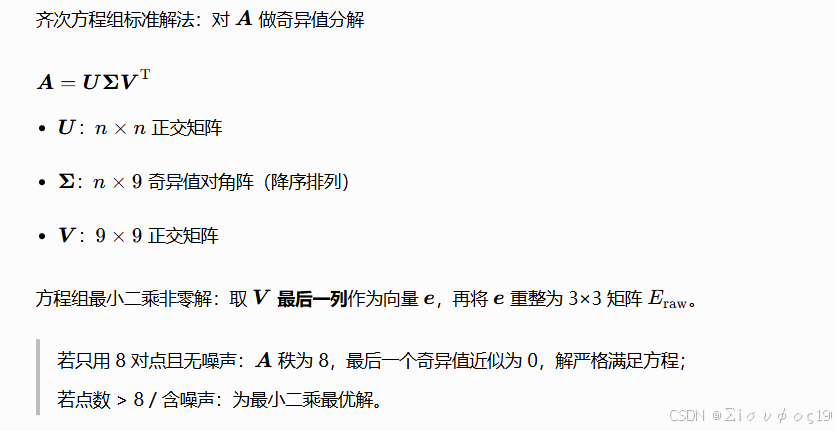
3. 求解思路(SVD 分解)
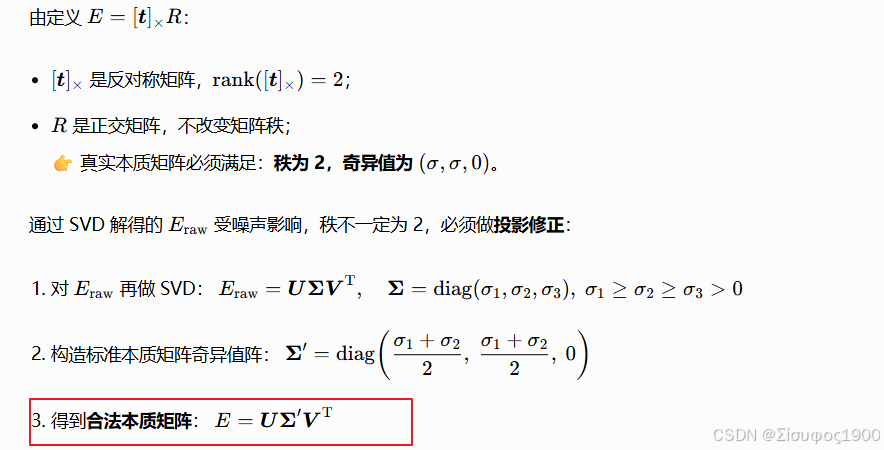
4、本质矩阵秩约束修正
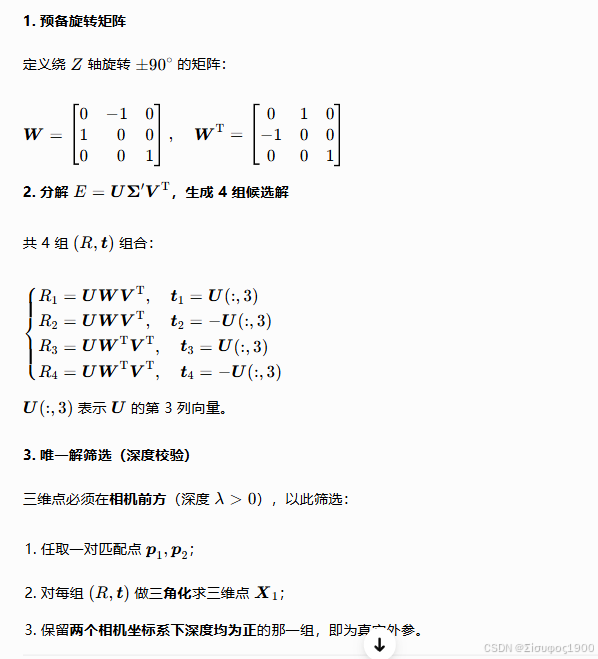
5、本质矩阵E恢复R t