本文为中伟视界工业AI视觉落地实战总结,针对智慧港口水域、皮带、堆场三大核心场景,完整拆解深度学习算法选型、模型优化、误报优化、边缘部署全套工程落地方案,适合工业视觉、边缘计算、智慧港口研发与工程人员参考。

一、场景定义:港口视觉感知的三大"硬骨头"
港口是一个高度复杂的作业系统,涵盖水域、陆域、堆场三大空间。如果从算法工程师的视角来拆解,这套系统面临的并不是通用的"目标检测"问题,而是三个完全不同的技术挑战:
水域场景,核心是"动态目标的长期行为理解"。算法需要回答:这艘船是在正常停泊,还是在异常漂移?它闯入电子围栏是偶然路过还是蓄意进入?这需要模型具备时序推理能力,而非单帧分类。
皮带机场景,核心是"连续流中的异常形态识别"。皮带在高速运转,异物可能出现在任意位置、任意角度,而且形态极其不规则(角钢是长条形的,螺纹钢是螺旋状的)。检测模型需要对"形状"有极强的泛化能力。
堆料场场景,核心是"大场景中的细粒度感知"。异物是堆场里的一个"小点",苫布覆盖则需要判断边角是否被风吹起。前者考验小目标检测,后者考验分割的精细度。
三个场景,三个完全不同的技术侧重点。以下分别展开。
二、水域航道:多目标跟踪+电子围栏,让每一艘船都有"行为标签"
2.1 问题的本质
港口水域的安全隐患,归结起来是两类误判:
一是"不该动的动了"------停泊的船因风雨、水流冲击意外偏离泊位,向相邻泊位或航道方向漂移。人眼从监控画面上看,很难第一时间判断船体是否"非正常移动",尤其是在风浪本身就比较大的天气。
二是"不该来的来了"------小型渔船、钓鱼艇等未经许可的船只闯入核心作业区或主航道。这类目标的特点是:小、远、速度快,在监控画面中可能只占几十个像素。
2.2 技术路线
第一步:高性能检测打底
在检测层,采用YOLO-v8和RT-DETR作为双检测器。YOLO-v8的优势在于速度------港口动辄几十上百路视频流,每个摄像头都需要实时分析,检测效率直接决定系统能否规模化部署。RT-DETR则作为补充,其端到端的设计在小目标召回率上有一定优势,尤其适用于远距离渔船检测。
两者并行推理,结果相互校验,既保证了速度也兼顾了精度。
第二步:多目标跟踪构建"轨迹画像"
有了每帧的检测框还不够,系统需要知道"这个框是谁、从哪来、要到哪去"。这里用到DeepSORT和ByteTrack两种跟踪算法。
DeepSORT的原理比较直观:它给每个检测目标提取外观特征(类似给每一艘船拍一张"面部照片"),然后在连续帧之间做特征匹配,即使船只被短暂遮挡也能重新关联上。ByteTrack则采用更轻量的策略,在检测框密集的场景下依然保持稳定的跟踪效果。
两者结合,系统能实时输出每一艘船的:实时位置、运动轨迹、瞬时速度、停泊状态(静止/缓慢移动/异常加速)。
第三步:语义电子围栏触发行为判断
这一步是关键。技术人员在视频画面中,用多边形标注出核心作业区边界、航道边界、禁入区域等"电子围栏"。算法将检测到的每一艘船的位置与这些区域做空间关系计算。
当一艘船持续靠近围栏边界并最终进入禁入区域,系统判定"闯入";当一艘停泊船只的轨迹中心点向航道方向持续位移,且位移量超过预设阈值,系统判定"漂移"。
第四步:多目标联合判断过滤误报
纯粹的检测+跟踪方案在港口会遇到一个实际问题------风浪大时船体会晃动,仅凭检测框的位置变化很容易产生误报。
解决方案是引入"联合判断"逻辑:系统同时检测船舶、护舷、缆绳三个目标。护舷是否还在船与码头之间?缆绳是否可见且处于紧绷状态?当三者状态综合评估后,再叠加时间维度的逻辑------连续多帧触发才产生告警。这一机制大幅降低了因短时船体晃动导致的无效报警。
2.3 远距离小目标的优化
港口水域视野开阔,一艘小型渔船在远处可能只有几十个像素。为了让模型"看清"这类目标,团队在训练阶段采用了多尺度训练策略------将不同分辨率的图像混入训练集,让模型学习到"大目标变小了依然是同一个目标"的尺度不变性;配合马赛克数据增强和注意力机制模块,进一步聚焦模型对局部特征的敏感度。
三、皮带机运输:语义分割给皮带"画线",单目视觉给料堆"测体积"
3.1 问题的本质
皮带机场景最大的特点是"连续"。皮带一直在转,物料一直在流,异常可能发生在任何一帧。传统的人工巡检方式根本不可能做到全覆盖------一条皮带几公里长,巡检工人走完一趟,可能异常早已造成损失。
三类问题各有特点:
皮带跑偏------皮带边缘偏离托辊中心线。判断跑偏不能靠"有无",而要靠"偏离了多少"。这天然适合用回归或分割的方式来处理。
皮带异物------角钢、螺纹钢、木板等混在物料中。这类目标形状极不规则,且与物料的颜色、纹理差异可能很小。比如一根锈蚀的螺纹钢混在铁矿石中,人眼都未必能分辨。
下料口堵料------物料从高处落下,在漏斗处堆积。堵料是一个"趋势"问题------从轻微堆积到完全堵死有一个过程,如果能在这个过程中提前预警,就能避免停机清理。
3.2 技术路线
跑偏检测:语义分割实现像素级量化
对皮带跑偏的检测,团队没有选择目标检测方案,而是采用了BiSeNetV2和Fast-SCNN这类轻量级实时语义分割模型。
语义分割的优势在于"精细"。它不是在画面上画一个框说"这里有一条皮带",而是在像素级别标注出"哪些像素属于皮带边缘"。有了这条像素级的边缘线,算法就能精确计算其曲率变化和位置偏移量。
具体做法是:在皮带正常运行状态下,先记录一条"基准边缘线"。实际运行中,算法实时提取当前皮带边缘线,与基准线做逐像素对比,计算出偏离距离。偏离量落入不同区间则触发不同级别的预警------轻度偏离发提醒,中度发预警,严重偏离直接告警停机。
异物检测:从轮廓推算风险等级
异物在皮带上的形态千变万化。一块石头可能是圆形,一根角钢是长条形,一根钢筋是螺旋状。目标检测模型需要对这些"非典型"形状都有足够的识别能力。
分割模型在这里的优势再次体现:它输出的是异物的精确轮廓。有了轮廓,算法就能估算其像素面积,再结合摄像机标定参数推算出实际尺寸。小尺寸异物(如小石块)触发低级别预警;大尺寸异物(如整根角钢)直接触发紧急告警,必要时联锁停机。
堵料预判:单目深度估计监测体积变化
下料口堵料的检测,传统方案用超声波或雷达物位计,需要额外安装硬件且维护成本高。视觉方案的优势在于"复用"------用同一个摄像头既看异物又看堵料。
具体方法是在下料口区域部署基于单目视觉深度估计的轻量级算法。通过对连续帧中物料堆积区域的深度值进行分析,算法能实时计算出物料堆积的相对体积,并绘制体积变化曲线。当体积持续增长且增长速度呈加速趋势时,系统在"堵死"发生前数分钟甚至更早就发出预判性预警。
这一方案的关键不在于"测得多准",而在于"趋势抓得对"------堵料是一个渐变过程,体积曲线持续上升的斜率比绝对值更有判断价值。
3.3 为什么语义分割比目标检测更适合皮带场景?
这是一个值得单独说明的技术选型点。
目标检测输出的是矩形边界框。对于"皮带边缘"这种线性目标,矩形框无法精确描述其形态变化------框在某个位置,但边缘可能偏移了,偏移量是多少?框无法回答。
语义分割输出的是像素级分类结果。它能精确回答"每一个像素属于皮带还是不属于皮带",从而精确提取边缘线、计算曲率、量化偏移。
同样道理,对于异物的"形状"和"尺寸",分割提供的轮廓信息远丰富于检测框。这在需要"分级报警"的场景下尤为重要。
四、堆料场:在大场景里找小目标,在苫布上辨完整性
4.1 问题的本质
堆料场是三个场景中"最开放"的一个。开阔、露天、目标尺度差异极大------从几十米宽的货堆到十几厘米的垃圾,算法需要在一个画面里同时处理"宏观"和"微观"两种粒度的信息。
两类核心问题:
异物检测------堆场里的异物五花八门:大风刮来的塑料袋、作业遗留的工程废弃物、甚至鸟类尸体。这些异物的共同点是"小"且"随机",没有固定的出现位置和规律。
苫布覆盖检测------环保合规要求特定货堆必须用苫布覆盖。但苫布可能因为大风被掀开一角、可能因为覆盖不规范露出边缘、可能在长时间日晒后破损。算法需要判断的不是"有没有布",而是"布盖得全不全"。
4.2 技术路线
小目标检测:特征金字塔+难样本生成
堆场异物的核心难点在于"尺度"。一个烟盒在航拍视角下可能只有几个像素宽,常规的检测网络经过多次下采样后,小目标的特征早已消失殆尽。
解决方案是引入特征金字塔网络。其核心思想很直观:浅层特征图分辨率高、保留了更多细节位置信息;深层特征图分辨率低、但语义信息更丰富。FPN将两者融合,让模型在检测小目标时既能"看到"细节位置,又能"理解"这是什么物体。
同时,为了提升模型在困难场景下的表现,团队采用GAN生成难样本------通过对抗生成的方式合成遮挡、模糊、光照变化等极端条件下的异物图像,扩充训练集,让模型在训练阶段就见足够多的"刁钻角度"。
苫布覆盖检测:实例分割+纹理分类双重校验
苫布覆盖不是简单的二分类问题。一是苫布本身形状不规则,覆盖在一个不规则堆体上,边界是动态的;二是"覆盖完整性"是一个连续值------盖了90%算不算合格?
解决方案采用两步走。第一步:用实例分割模型(Mask R-CNN)精确勾勒出苫布在货堆上的覆盖区域轮廓,同时识别出货堆的顶部边界,计算两者重叠面积的比例。第二步:在覆盖区域内做纹理分类------苫布有特定的编织纹理,如果某个区域纹理特征与苫布不符,说明该区域未被覆盖或苫布已破损。
两步交叉验证,既能计算覆盖面积百分比,又能定位具体是哪个部位覆盖不达标。
五、系统性难题与应对策略
以上三个场景各自有不同的算法侧重点。但当把这些方案真正部署到港口现场时,所有问题会交织在一起,形成一套系统性的工程挑战。
5.1 极端环境干扰
港口是全天候作业场景。白天强光下画面过曝、夜间低光照下细节丢失、雨雾天气下对比度降低、水面反光造成局部区域过亮------每一种环境变化都会导致模型性能波动。
应对策略:首先是数据层面的投入------构建覆盖全时段(昼夜)、全天气(晴雨雪雾)的港口专属数据集,让模型在训练阶段就接触足够多样化的场景。其次是在模型前端集成图像预处理模块------低光增强算法提升暗部细节,去雾算法恢复雨雾天气下的对比度。最后是引入时序建模------利用3D CNN或Transformer结构捕捉视频前后帧的时序信息,让模型学会判断"画面抖动是风吹的还是目标真的在动"。
5.2 极低的容错率
工业安全场景对漏报率几乎是零容忍------一次漏报可能意味着一次安全事故。但与此同时,过高的误报率同样不可接受,频繁的假告警会让操作人员产生"狼来了"的麻木效应。
解决方案是多层次的:多模型融合投票机制(一个异常需两个以上模型同时确认才触发告警)、三级告警分级(预警/低风险/高风险分别对应不同的响应流程)、关键点位多视角相机交叉验证(两个以上角度的画面都确认异常才认定为真事件)。
5.3 有限的边缘算力
港口网络环境复杂,并非所有点位都具备稳定的光纤链路。相当比例的摄像头需要依靠无线网络传输,实时上传高清视频流到云端并不现实。
因此,推理必须发生在本地------即摄像头附近的边缘计算盒子上。这就要求模型在"尽可能小"的同时"尽可能准"。团队的工作集中在模型轻量化方向:剪枝(去除冗余的神经网络通道)、量化(将浮点计算转换为整数计算)、知识蒸馏(用大模型指导小模型学习)。经过这三步优化后的模型,体积可压缩至原来的四分之一到三分之一,推理延迟控制在毫秒级别,同时精度损失控制在可接受范围内。
六、系统架构与演进方向
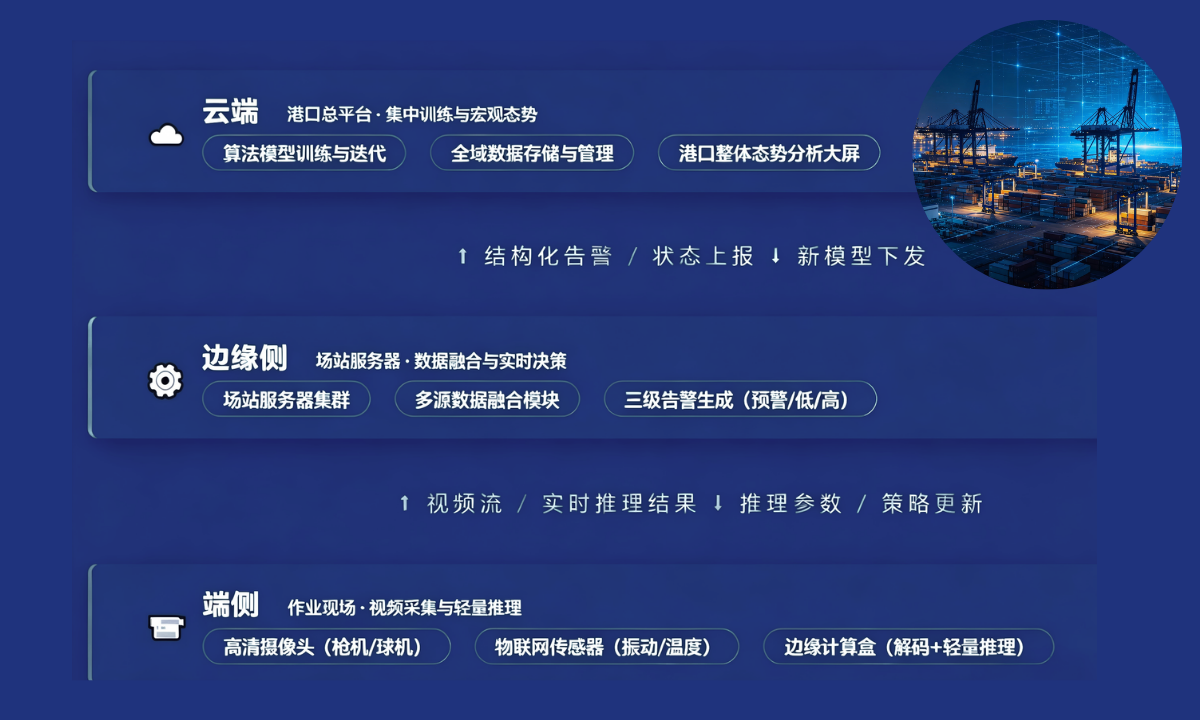
6.1 当前架构:端-边-云三层协同
端侧(摄像头+边缘计算盒):承担视频流实时解码和轻量级模型推理任务,所有告警在本地生成,延迟控制在毫秒级。
边缘侧(场站服务器):汇聚一个场站内多个端侧的数据,进行多源信息融合(比如多个摄像头对同一目标交叉验证),承担更复杂的分析任务和本地模型的增量微调。
云端(港口中心平台):负责所有算法模型的集中训练、版本的迭代更新、全域数据的存储和管理,以及港口整体安全态势的宏观分析。训练好的新模型通过OTA方式下发给边缘侧和端侧。
6.2 演进方向
多模态融合:当前方案主要依赖可见光摄像头,未来将融合激光雷达点云数据、AIS船舶自动识别系统信号、各类物联网传感器数据,构建物理空间与数字空间完全映射的数字孪生体系。
预测性维护:当前系统主要解决"当下"的异常识别,未来方向是利用长期积累的视觉数据,分析设备(如皮带托辊、滚筒轴承)的异常磨损趋势,在故障发生前就发出维护建议,真正实现从"事后告警"到"事前预测"的跨越。
大模型与少样本学习:港口场景中新增检测类别是常态------今天出现了一种新型异物、明天环保有了新的覆盖标准。传统做法需要重新采集数千张样本进行训练。视觉大模型强大的零样本/少样本泛化能力,有望将新类别的适配周期从数周压缩到数天。
七、结语
深度学习在智慧港口的落地,不是一个"训练一个模型放上去就能用"的简单过程。
它需要对水域、皮带、堆场三个场景分别设计不同的技术路线------水域要处理的是动态目标的行为理解,皮带要解决的是连续流中的异常形态分割,堆场要攻克的是大场景中的细粒度感知。
它需要在实际部署中反复打磨------环境干扰怎么抗、误报漏报怎么权衡、边缘算力怎么优化。
它还需要在系统架构层面统筹------端侧管实时、边侧管融合、云端管训练,三者协同才能形成数据闭环和持续迭代。
这套方案从算法选型到工程化部署,完整覆盖了智慧港口视觉感知的核心技术链条,可为港口AI视觉落地、工业算法优化、边缘智能部署提供实战参考。
#智慧港口 #计算机视觉 #深度学习 #语义分割 #YOLO #边缘计算 #端边云协同 #工业AI #港口智能化 #小目标检测