一、准备步骤
博主用的设备是Ubuntu20.04+realsenseD456+ROS1noetic
首先需要安装相关的ealsense驱动,可以参考我的另一篇博客如何安装Realsense驱动
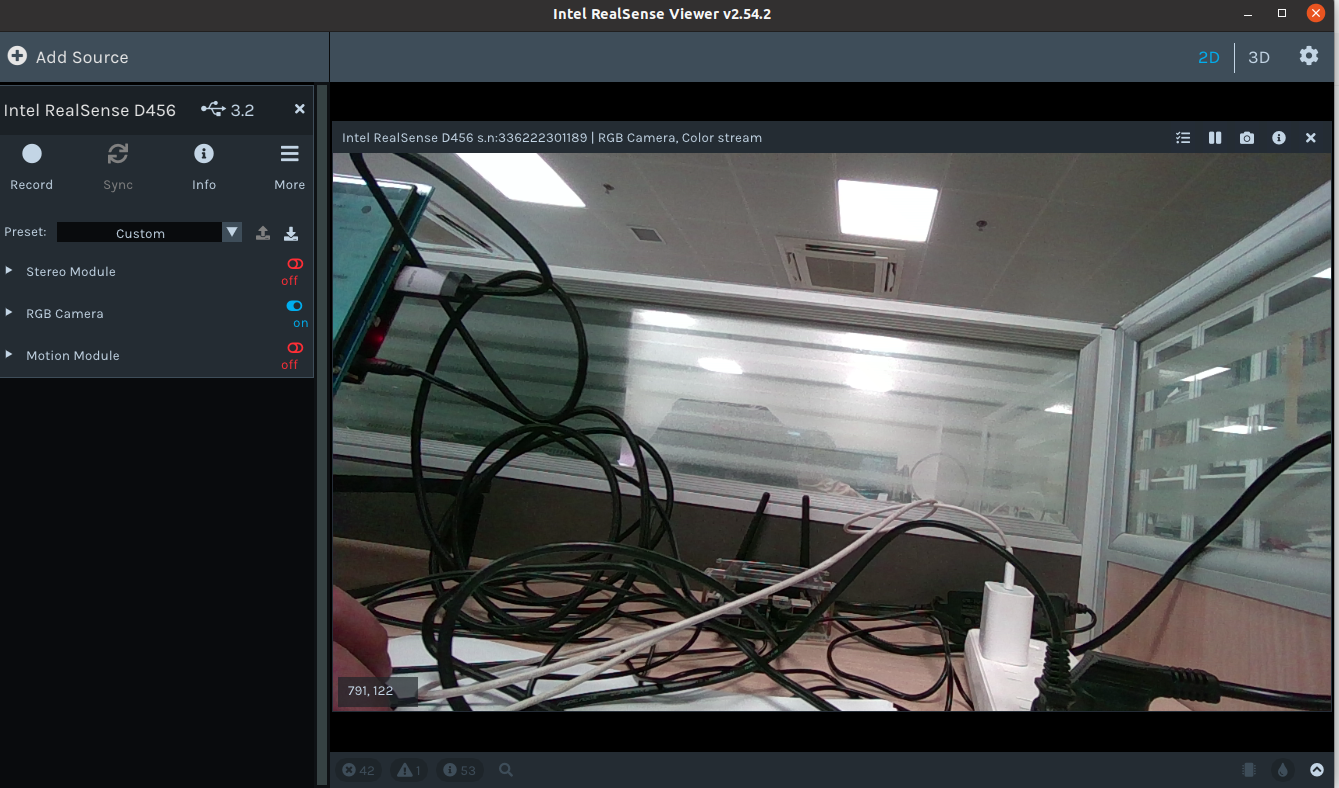
新建一个终端,调用如下命令检查相机是否可以正常工作:
realsense-viewer出现如下图像即为成功:
**Aurco二维码生成的网址为: Aurco二维码
二、下载并编译Aruco_ros
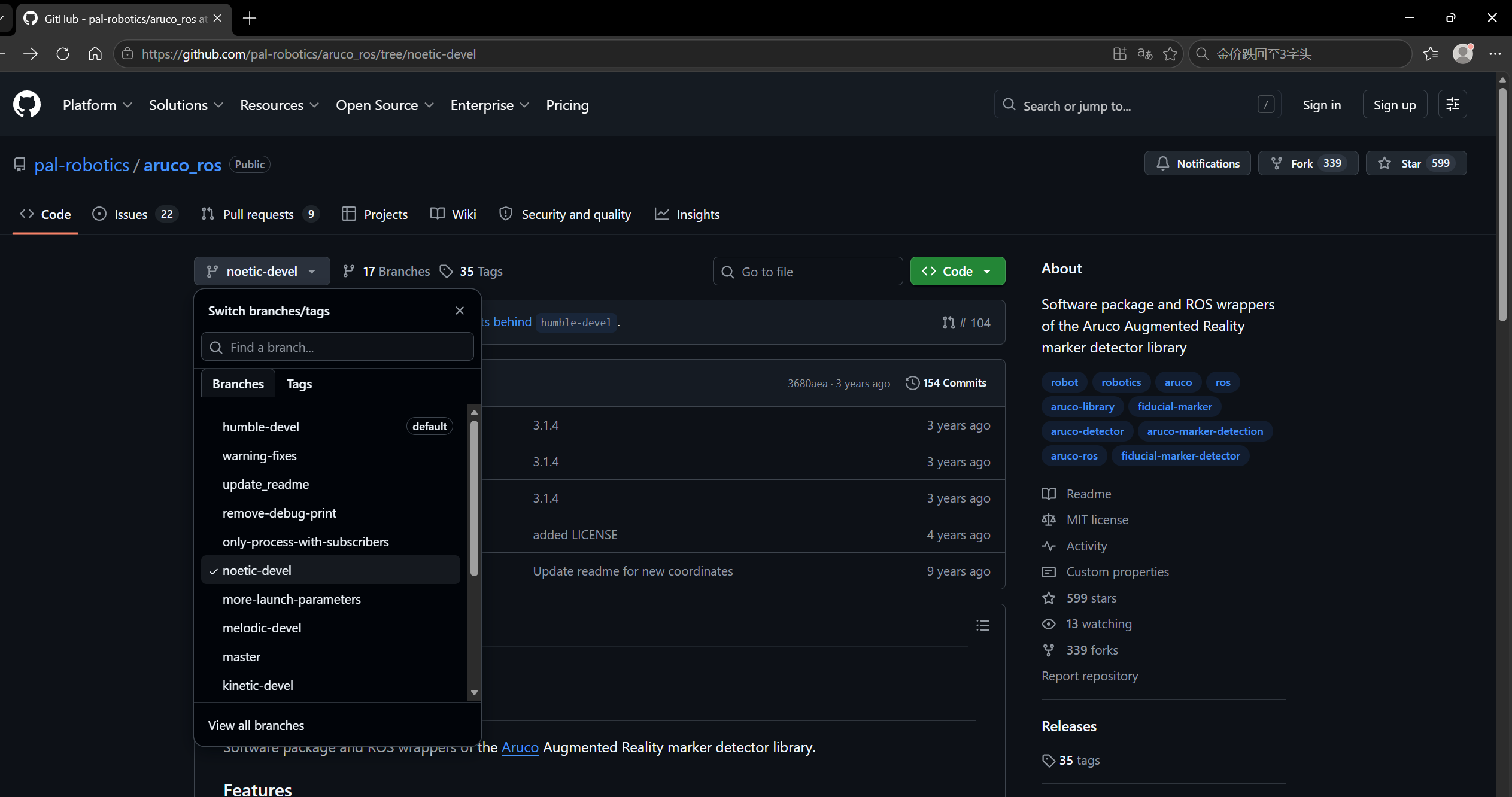
**由于ROS1-noetic于2025年5月31日已经停止维护了,所以直接用sudo的命令或者git的命令去下载aruco_ros是不可行的!!
科学上网后,登陆github官网,搜索aruco_ros并找到ros-noetic分支,如下图所示:
随后,直接下载安装包并解压缩,解压缩后的文件夹放在/home/jetson/realsense_ws/src路径下。这里注意修改为自己电脑对应的路径名称。回到realsense_ws工作空间下,先调用:
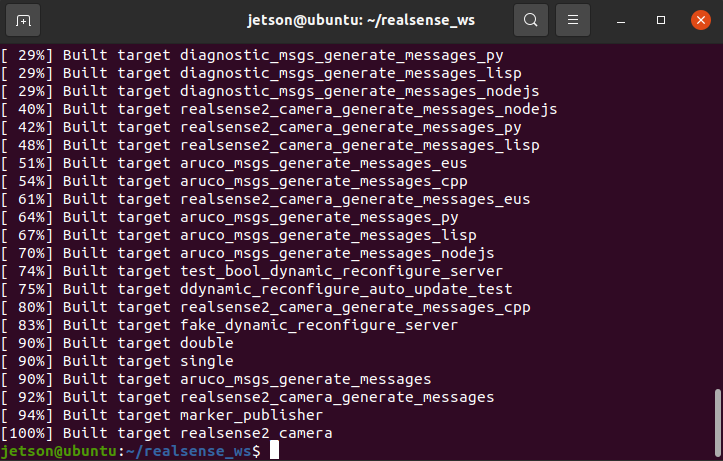
rm -rf build devel install build_isolated devel_isolated install_isolated来清除之前的编译文件,如果之间调用catkin build编译过,或者之前用过catkin_make,可能会产生不兼容的问题,所以需要先调用上述命令来清理编译结果。随后,调用catkin_make开始编译,直至成功,成功界面如下:
三、文件修改、识别及输出
3.1 单二维码识别single.launch
3.1.1 文件修改
对于rs_camera.launch文件,首先需要把这三行全部改为true,这样才能保证有图像话题输出,方便后续订阅。

<launch>
<arg name="serial_no" default=""/>
<arg name="usb_port_id" default=""/>
<arg name="device_type" default=""/>
<arg name="json_file_path" default=""/>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="external_manager" default="false"/>
<arg name="manager" default="realsense2_camera_manager"/>
<arg name="output" default="screen"/>
<arg name="respawn" default="false"/>
<arg name="fisheye_width" default="-1"/>
<arg name="fisheye_height" default="-1"/>
<arg name="enable_fisheye" default="false"/>
<arg name="depth_width" default="-1"/>
<arg name="depth_height" default="-1"/>
<arg name="enable_depth" default="true"/>
<arg name="confidence_width" default="-1"/>
<arg name="confidence_height" default="-1"/>
<arg name="enable_confidence" default="true"/>
<arg name="confidence_fps" default="-1"/>
<arg name="infra_width" default="848"/>
<arg name="infra_height" default="480"/>
<arg name="enable_infra" default="true"/>
<arg name="enable_infra1" default="true"/>
<arg name="enable_infra2" default="true"/>
<arg name="infra_rgb" default="false"/>
<arg name="color_width" default="-1"/>
<arg name="color_height" default="-1"/>
<arg name="enable_color" default="true"/>
<arg name="fisheye_fps" default="-1"/>
<arg name="depth_fps" default="-1"/>
<arg name="infra_fps" default="30"/>
<arg name="color_fps" default="-1"/>
<arg name="gyro_fps" default="-1"/>
<arg name="accel_fps" default="-1"/>
<arg name="enable_gyro" default="false"/>
<arg name="enable_accel" default="false"/>
<arg name="enable_pointcloud" default="false"/>
<arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/>
<arg name="pointcloud_texture_index" default="0"/>
<arg name="allow_no_texture_points" default="false"/>
<arg name="ordered_pc" default="false"/>
<arg name="enable_sync" default="false"/>
<arg name="align_depth" default="false"/>
<arg name="publish_tf" default="true"/>
<arg name="tf_publish_rate" default="0"/>
<arg name="filters" default=""/>
<arg name="clip_distance" default="-2"/>
<arg name="linear_accel_cov" default="0.01"/>
<arg name="initial_reset" default="false"/>
<arg name="reconnect_timeout" default="6.0"/>
<arg name="wait_for_device_timeout" default="-1.0"/>
<arg name="unite_imu_method" default=""/>
<arg name="topic_odom_in" default="odom_in"/>
<arg name="calib_odom_file" default=""/>
<arg name="publish_odom_tf" default="true"/>
<arg name="stereo_module/exposure/1" default="7500"/>
<arg name="stereo_module/gain/1" default="16"/>
<arg name="stereo_module/exposure/2" default="1"/>
<arg name="stereo_module/gain/2" default="16"/>
<group ns="$(arg camera)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="external_manager" value="$(arg external_manager)"/>
<arg name="manager" value="$(arg manager)"/>
<arg name="output" value="$(arg output)"/>
<arg name="respawn" value="$(arg respawn)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="usb_port_id" value="$(arg usb_port_id)"/>
<arg name="device_type" value="$(arg device_type)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/>
<arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/>
<arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/>
<arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/>
<arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/>
<arg name="confidence_width" value="$(arg confidence_width)"/>
<arg name="confidence_height" value="$(arg confidence_height)"/>
<arg name="enable_confidence" value="$(arg enable_confidence)"/>
<arg name="confidence_fps" value="$(arg confidence_fps)"/>
<arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/>
<arg name="infra_width" value="$(arg infra_width)"/>
<arg name="infra_height" value="$(arg infra_height)"/>
<arg name="enable_infra" value="$(arg enable_infra)"/>
<arg name="enable_infra1" value="$(arg enable_infra1)"/>
<arg name="enable_infra2" value="$(arg enable_infra2)"/>
<arg name="infra_rgb" value="$(arg infra_rgb)"/>
<arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="infra_fps" value="$(arg infra_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="enable_gyro" value="$(arg enable_gyro)"/>
<arg name="enable_accel" value="$(arg enable_accel)"/>
<arg name="publish_tf" value="$(arg publish_tf)"/>
<arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/>
<arg name="filters" value="$(arg filters)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
<arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
<arg name="reconnect_timeout" value="$(arg reconnect_timeout)"/>
<arg name="wait_for_device_timeout" value="$(arg wait_for_device_timeout)"/>
<arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
<arg name="topic_odom_in" value="$(arg topic_odom_in)"/>
<arg name="calib_odom_file" value="$(arg calib_odom_file)"/>
<arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/>
<arg name="stereo_module/exposure/1" value="$(arg stereo_module/exposure/1)"/>
<arg name="stereo_module/gain/1" value="$(arg stereo_module/gain/1)"/>
<arg name="stereo_module/exposure/2" value="$(arg stereo_module/exposure/2)"/>
<arg name="stereo_module/gain/2" value="$(arg stereo_module/gain/2)"/>
<arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/>
<arg name="ordered_pc" value="$(arg ordered_pc)"/>
</include>
</group>
</launch>随后,注意修改aurco工作空间下的single.launch文件(因为我用的single.launch文件来做测试,所以只修改了这个文件,如果要用到该工作空间下的别的文件也要同步修改)
有6个地方着重修改,分别是:
a. <arg name="markerId" default="123"/>,default后面的值需要改成自己生成的Aurco二维码的ID。
b. <arg name="markerSize" default="0.034"/> <!-- in m -->,default后面的值需要改成自己生成的Aurco二维码的size(也是物理边长),单位是m。
c. <arg name="eye" default="infra1"/>,default后面的值需要改成realsense相机发布的话题,注意这里不是整个话题,eye参数只是话题中的某一节,所以default并没有改为整个话题名称。
d. <remap from="/camera_info" to="/camera/$(arg eye)/camera_info" />,default后面的值需要改成相机发布的话题,这里看到c中的参数eye被传过来了,也就解释了为什么eye会那样设置
e. <remap from="/image" to="/camera/$(arg eye)/image_rect_raw" />,
**f. <param name="camera_frame" value="/camera_link"/>,这里default后面一定要改成/camera/link,该link可以融合相机携带的其他传感器
修改后的launch文件如下:
<launch>
<arg name="markerId" default="123"/>
<arg name="markerSize" default="0.034"/> <!-- in m -->
<arg name="eye" default="infra1"/>
<arg name="marker_frame" default="aruco_marker_frame"/>
<arg name="ref_frame" default=""/> <!-- leave empty and the pose will be published wrt param parent_name -->
<arg name="corner_refinement" default="LINES" /> <!-- NONE, HARRIS, LINES, SUBPIX -->
<node pkg="aruco_ros" type="single" name="aruco_single">
<remap from="/camera_info" to="/camera/$(arg eye)/camera_info" />
<remap from="/image" to="/camera/$(arg eye)/image_rect_raw" />
<param name="image_is_rectified" value="True"/>
<param name="marker_size" value="$(arg markerSize)"/>
<param name="marker_id" value="$(arg markerId)"/>
<param name="reference_frame" value="$(arg ref_frame)"/> <!-- frame in which the marker pose will be refered -->
<param name="camera_frame" value="/camera_link"/>
<param name="marker_frame" value="$(arg marker_frame)" />
<param name="corner_refinement" value="$(arg corner_refinement)" />
</node>
</launch>以下面两张图为例,说明这里的参数怎么填。打开Aurco二维码生成二维码,Dictionary选Original ArUco,为aruco_ros的默认
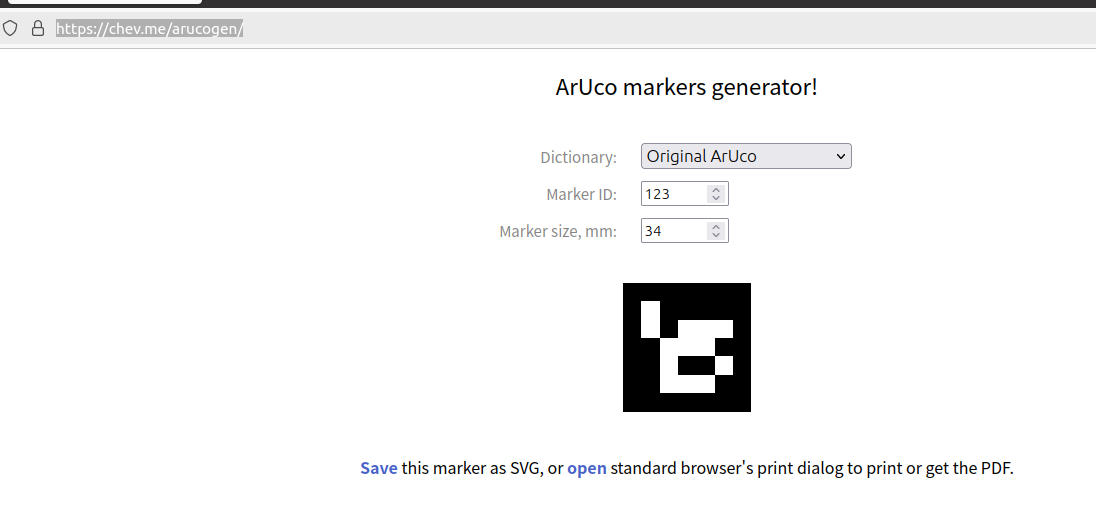
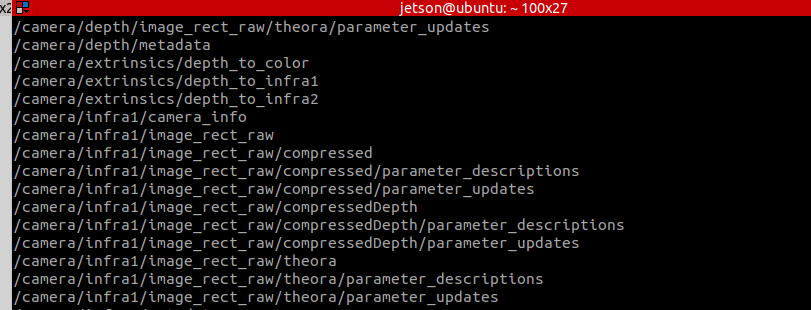
第一张图可以看出,a中markerId的值应该是123,b中markerSize应该是34mm,也就是0.034m。第二张图可以看出,c中参数eye可以选infra1(其实也可以infra2或者color),d和e的参数要改成/camera/(arg eye)/camera_info和/camera/(arg eye)/image_rect_raw,最后f的参数要改成/camera/link。
3.1.2 启动对应的launch文件,并打印输出
首先启动roscore,随后调用如下命令启动相机,
roslaunch realsense2_camera rs_camera.launch (可选)关闭结构光,即emitter_enabled设置为off
rosrun rqt_reconfigure rqt_reconfigure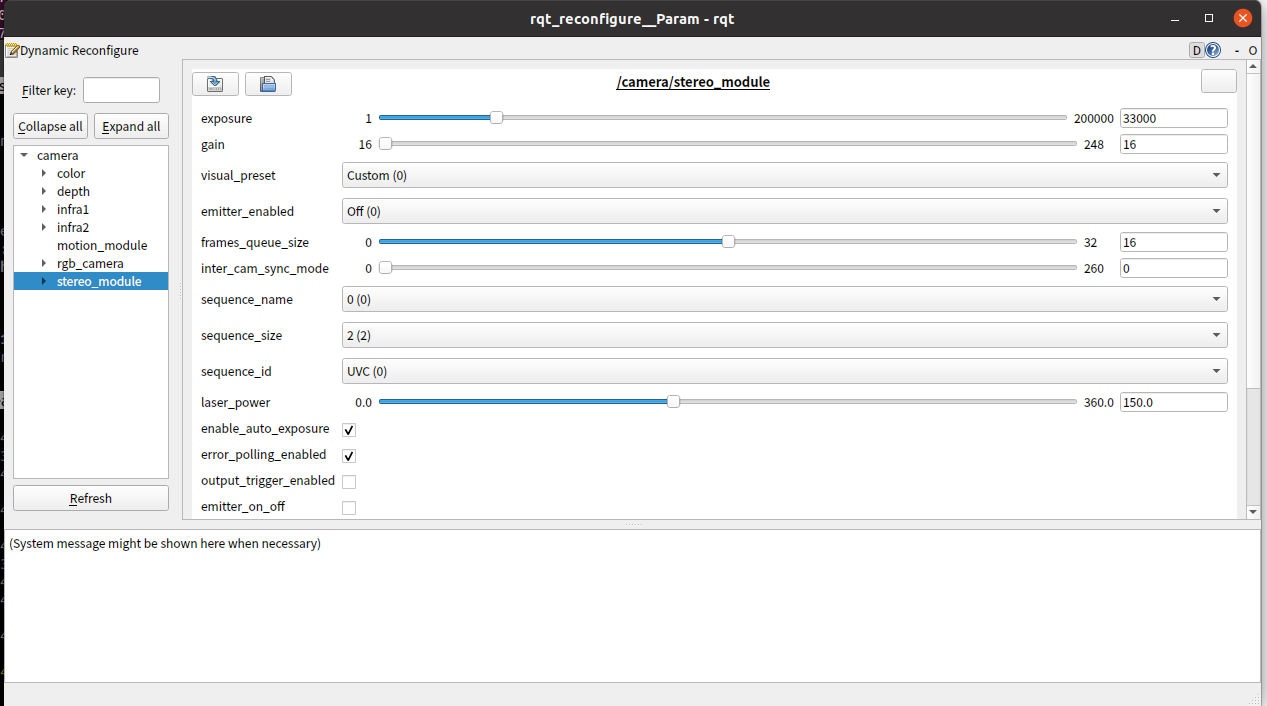
启动二维码识别
roslaunch aruco_ros single.launch可视化结果输出
rosrun image_view image_view image:=/aruco_single/result结果输出如下:
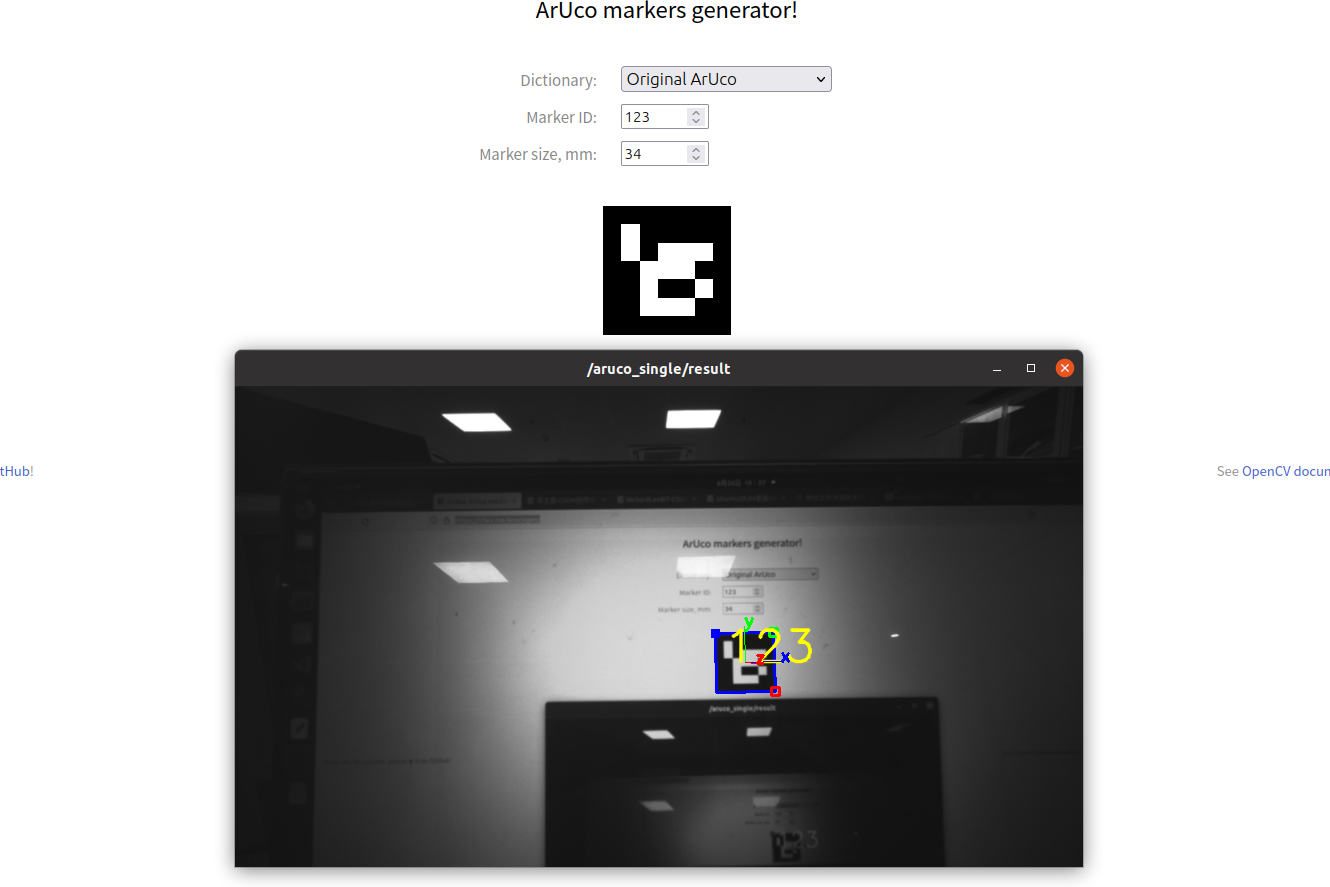
可以看到对已有的二维码,可以读取其ID号以及二维码的坐标系
最后打印位姿信息,调用如下命令:
rostopic echo /aruco_single/pose位姿信息输出如下:
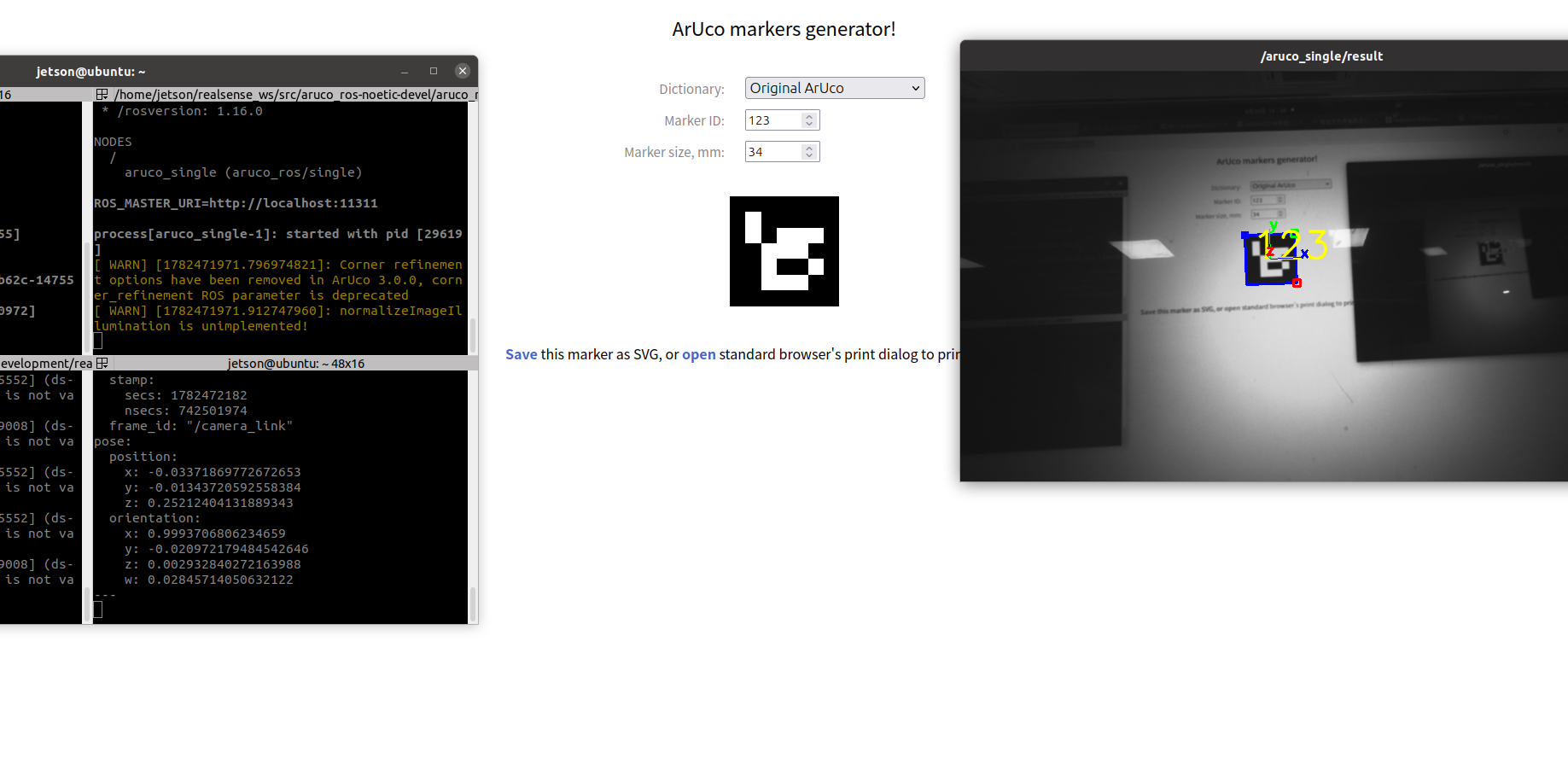
左侧终端的右下角即为输出的位姿信息。之所以可以通过单目相机输出该信息,是因为在single.launch文件中传入了实际二维码的size,所以可以调用算法直接输出位姿信息了。该位姿信息是二维码在相机坐标系下的位姿。相机坐标系和realsense自身的定义是一样的,X水平向右,Y竖直向下,Z垂直纸面向里。
3.2 两个二维码识别double.launch
3.2.1 文件修改
rs_camera.launch文件的修改同上一小节,这里主要讲double.launch文件该如何修改。
a. <arg name="marker1Id" default="123"/>
<arg name="marker2Id" default="300"/>,default的值需要改成自己生成的两个二维码的ID
b. <arg name="markerSize" default="0.034"/> <!-- in m -->,二维码大小,单位为米
c. <arg name="eye" default="infra1"/>,realsense左目相机,话题为infra1
d. <arg name="marker1_frame" default="aruco_marker_123" />
<arg name="marker2_frame" default="aruco_marker_300" />,这里修改为对应的二维码的ID值(我自己试的时候,发现只要不是纯数字都行,但是为了可读性,就按照我这里给出的结果来设置吧)
e. <remap from="/camera_info" to="/camera/$(arg eye)/camera_info" />,同single
f. <remap from="/image" to="/camera/$(arg eye)/image_rect_raw" />,同single
g. <param name="parent_name" value="/camera/link"/>,同single
修改后的文件如下:
<launch>
<arg name="marker1Id" default="123"/>
<arg name="marker2Id" default="300"/>
<arg name="markerSize" default="0.034"/> <!-- in m -->
<arg name="eye" default="infra1"/>
<arg name="dct_normalization" default="True" />
<arg name="dct_filter_size" default="2" />
<arg name="marker1_frame" default="aruco_marker_123" />
<arg name="marker2_frame" default="aruco_marker_300" />
<node pkg="aruco_ros" type="double" name="aruco_simple">
<remap from="/camera_info" to="/camera/$(arg eye)/camera_info" />
<remap from="/image" to="/camera/$(arg eye)/image_rect_raw" />
<param name="image_is_rectified" value="True"/>
<param name="marker_size" value="$(arg markerSize)"/>
<param name="marker_id1" value="$(arg marker1Id)"/>
<param name="marker_id2" value="$(arg marker2Id)"/>
<param name="normalizeImage" value="$(arg dct_normalization)"/>
<param name="dct_components_to_remove" value="$(arg dct_filter_size)"/>
<param name="parent_name" value="/camera/link"/>
<param name="child_name1" value="$(arg marker1_frame)" />
<param name="child_name2" value="$(arg marker2_frame)" />
</node>
</launch>3.2.2 启动对应的launch文件并打印输出
roscore+相机启动同上,从launch文件开始有区别
启动二维码识别
roslaunch aruco_ros double.launch可视化结果输出(如果第一个命令不行,可以调用第二个,把输出图像换成compressed格式即可)
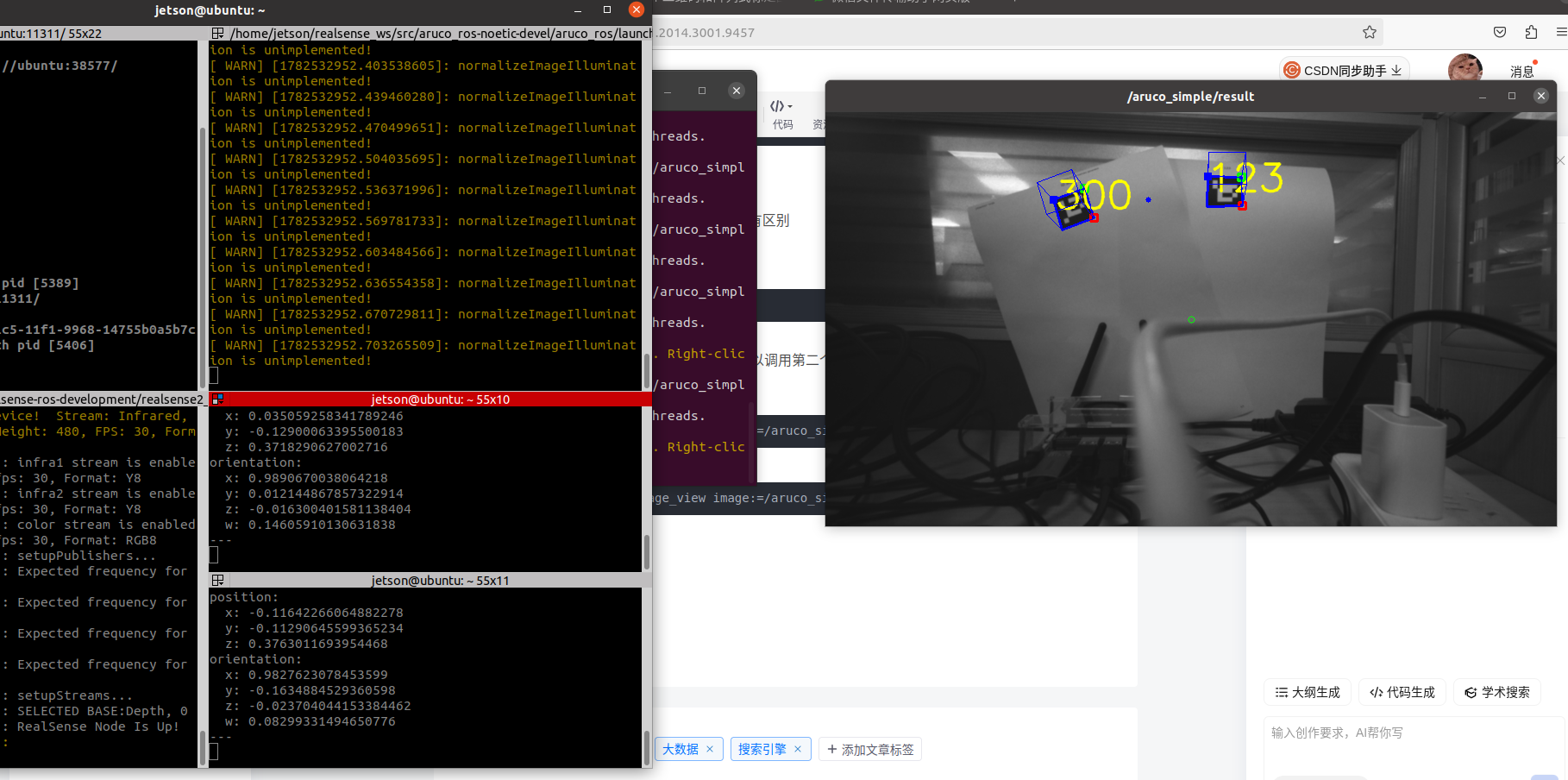
rosrun image_view image_view image:=/aruco_simple/result
rosrun image_view image_view image:=/aruco_simple/result _image_transport:=compressed位姿日至输出:
第一个二维码,即123
rostopic echo /aruco_simple/pose第二个二维码,即300
rostopic echo /aruco_simple/pose2运行结果如下:
可以看到终端最右边下面这两张图中,最底下是300的输出,上面是123的输出。输出格式依然是二维码在相机坐标系下的位姿,相机坐标系X轴水平向右,Y轴竖直向下,Z轴垂直纸面向里。
3.3 N个二维码识别multi.launch(自建)
N个二维码的识别,本质上是集成了一个multi.launch文件,并且创建不同的工作空间,多次调用single.launch文件。注意,上面的double.launch和这里的multi.launch文件实现的逻辑是不一样的,double可以直接识别两个二维码,multi虽然也可以识别两个二维码,但实际上是基于利用两个single.launch文件来识别。
3.3.1 multi.launch文件创建
multi.launch文件的结构如下(以123、300和215为例):
<launch>
<!-- 检测 ID=123 的标记 -->
<group ns="marker_123">
<node pkg="aruco_ros" type="single" name="aruco_single" output="screen">
<remap from="/camera_info" to="/camera/infra1/camera_info" />
<remap from="/image" to="/camera/infra1/image_rect_raw" />
<param name="image_is_rectified" value="True"/>
<param name="marker_size" value="0.034"/>
<param name="marker_id" value="123"/>
<param name="reference_frame" value=""/>
<param name="camera_frame" value="/camera_link"/>
<param name="marker_frame" value="aruco_marker_123"/>
<param name="corner_refinement" value="LINES"/>
</node>
</group>
<!-- 检测 ID=300 的标记 -->
<group ns="marker_300">
<node pkg="aruco_ros" type="single" name="aruco_single" output="screen">
<remap from="/camera_info" to="/camera/infra1/camera_info" />
<remap from="/image" to="/camera/infra1/image_rect_raw" />
<param name="image_is_rectified" value="True"/>
<param name="marker_size" value="0.034"/>
<param name="marker_id" value="300"/>
<param name="reference_frame" value=""/>
<param name="camera_frame" value="/camera_link"/>
<param name="marker_frame" value="aruco_marker_300"/>
<param name="corner_refinement" value="LINES"/>
</node>
</group>
<!-- 检测 ID=215 的标记 -->
<group ns="marker_215">
<node pkg="aruco_ros" type="single" name="aruco_single" output="screen">
<remap from="/camera_info" to="/camera/infra1/camera_info" />
<remap from="/image" to="/camera/infra1/image_rect_raw" />
<param name="image_is_rectified" value="True"/>
<param name="marker_size" value="0.034"/>
<param name="marker_id" value="215"/>
<param name="reference_frame" value=""/>
<param name="camera_frame" value="/camera_link"/>
<param name="marker_frame" value="aruco_marker_215"/>
<param name="corner_refinement" value="LINES"/>
</node>
</group>
<!-- 检测 更多 的标记 -->
</launch>3.1.2 启动对应的launch文件并打印输出
按照前面的步骤启动相机后,随后调用如下命令启动多个节点
roslaunch aruco_ros multi.launch 出现下图显示运行成功
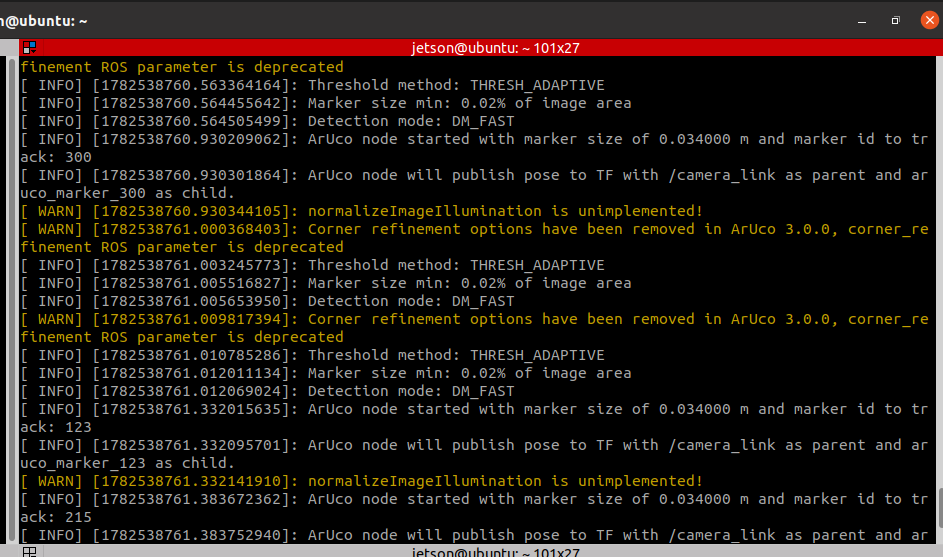
调用如下命令进行可视化。因为三个二维码有三个图像话题的输出,所以调用哪一个都可以,这里我调用的是marker_123工作空间下的图像话题:
rosrun image_view image_view image:=/marker_123/aruco_single/result最后开启多个终端,分别查看不同二维码的位姿信息:
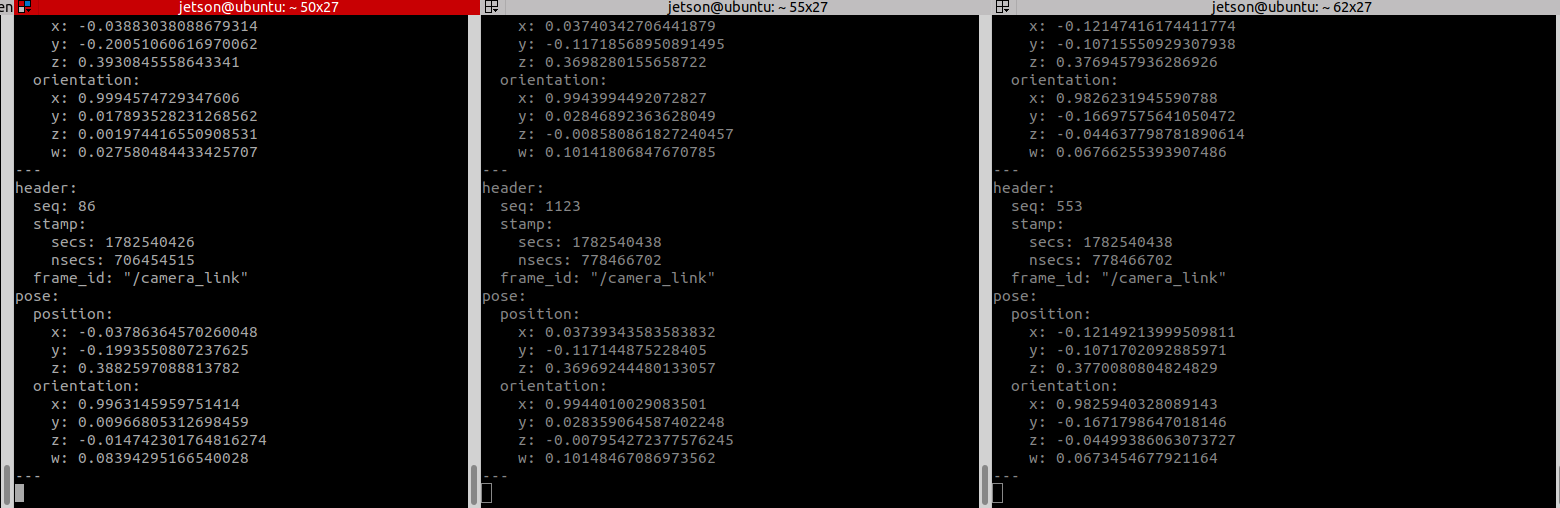
rostopic echo /marker_123/aruco_single/pose
rostopic echo /marker_215/aruco_single/pose
rostopic echo /marker_300/aruco_single/pose可以看到如下输出:左侧是215,中间是123,右侧是300