前置约定
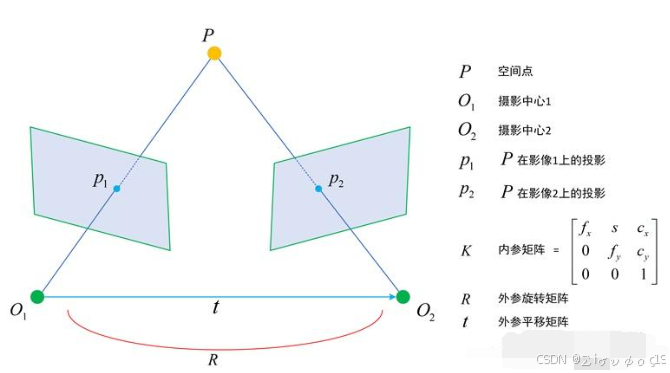
设两视图:左相机 L、右相机 R
- 像素坐标:u= u,v1 ^T
- 相机归一化平面坐标 (去内参、去畸变)x=K^-1u=x,y,1^T
- 左 / 右内参矩阵:Kl Kr
- 两相机相对位姿:旋转 R,平移 t;t的对应的反对称矩阵
- 空间点:X_w;平面场景满足:n^TX_w + d = 0
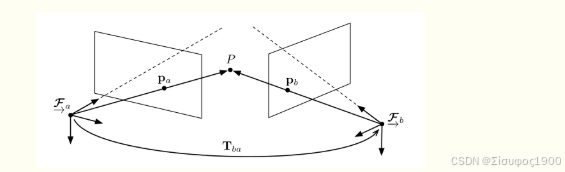
1. 本质矩阵E(Essential Matrix)
本质矩阵:两个视角相机坐标系的转换 描述空间中的一个点,在不同视角下的几何约束关系
本质矩阵和相机外参有关系,和内参无关系
数学定义
由两相机相对运动直接构造: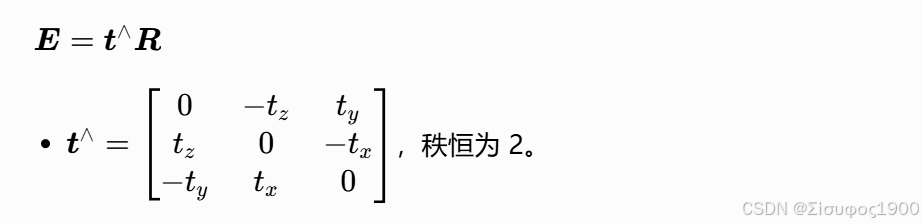
核心约束(对极约束,归一化坐标域)
同一空间点在两视图归一化坐标 x_L,x_R满足:

几何前提
无空间共面假设 ,适用于任意三维场景,仅要求两相机存在相对旋转 + 平移。
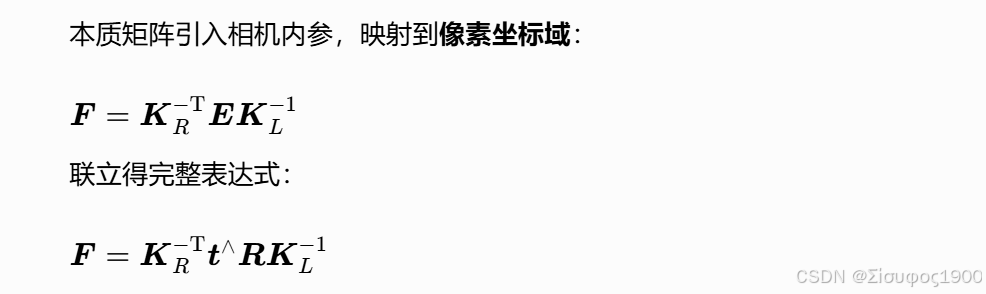
2. 基础矩阵 F(Fundamental Matrix)
基础矩阵:在不同视角下图像对应的关系,是单应矩阵的一个特例
1 数学定义
2 核心约束(对极约束,像素坐标域)

3、几何前提

3. 单应矩阵 H(Homography)
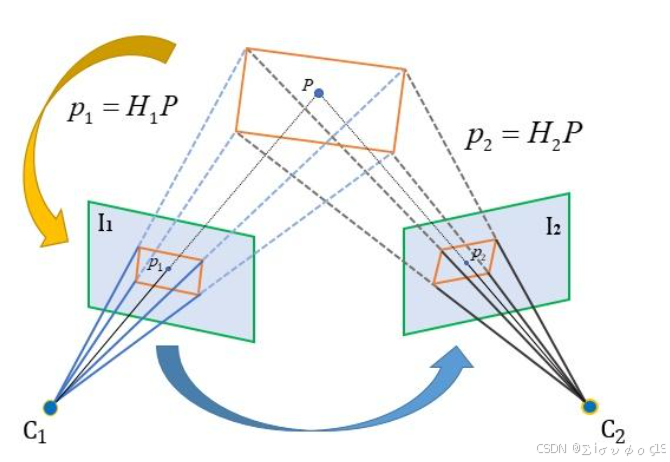
1 数学推导(强前提:空间点全部共面)
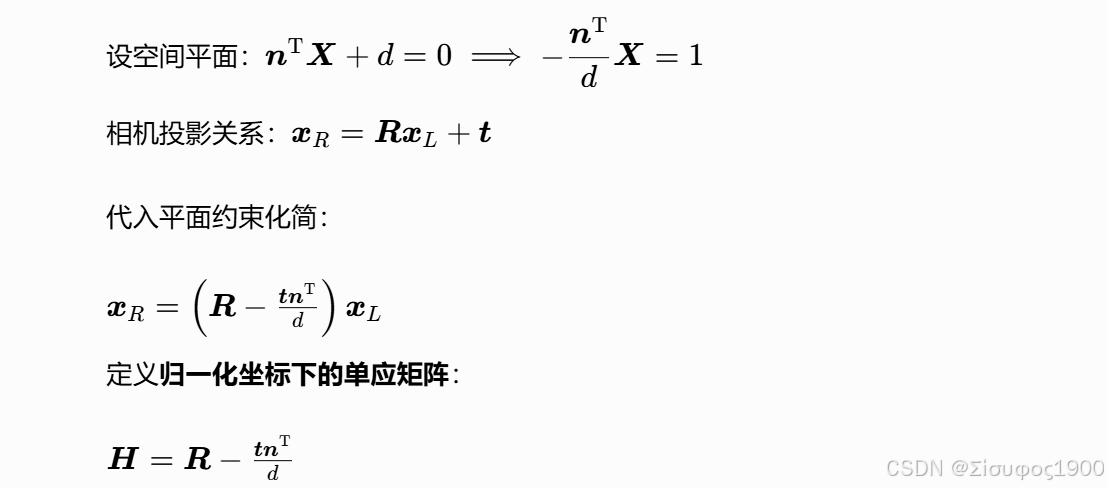
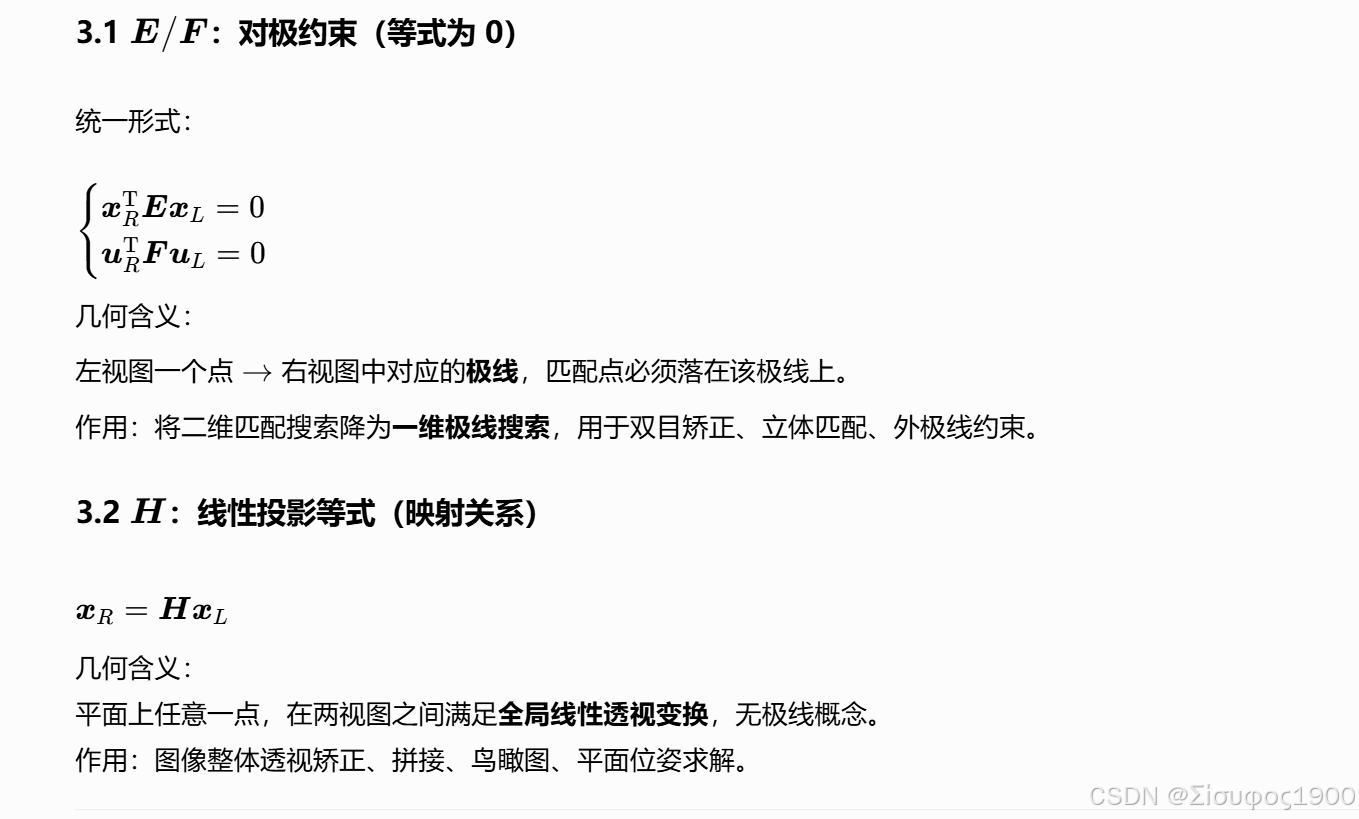
2 核心约束(线性投影映射)
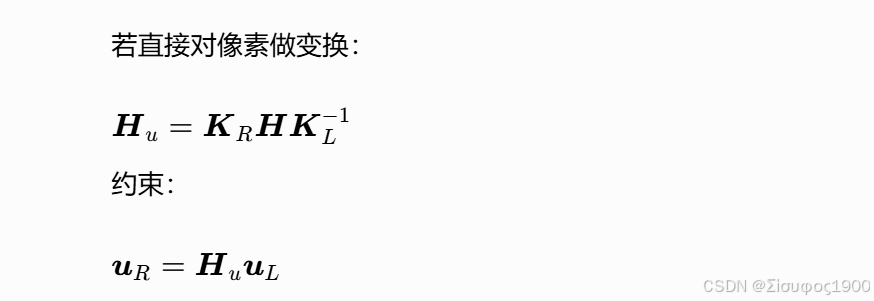
3 像素域单应矩阵
所有空间三维点严格落在同一个平面上。 一旦点不共面,H模型彻底失效
4、三大矩阵核心性质逐项对比(数学维度)
| 矩阵 | 作用坐标域 | 依赖内参 |
|---|---|---|
| E | 相机归一化坐标 x | 不依赖内参 |
| F | 图像原始像素坐标 u | 强依赖左右相机内参 |
| H | 可用于归一化坐标 / 像素坐标 | 像素域版本依赖内参 |
核心区分:
E只描述相机相对运动,和相机镜头无关;
F融合了运动 + 镜头内素参,直接适配图像像素
2 矩阵秩、奇异性、可逆性
-
本质矩阵 E :rank(E) = 2,秩亏、不可逆 。 标准性质:奇异值必满足 sigma_1=sigma_2,sigma_3=0。 相对旋转:3 DOF平移向量:仅方向 有效,整体尺度不可观 → 2 DOF 总自由度:5 每对点提供 2 个方程,理论最少:5 对匹配点(5 点法)
-
基础矩阵F: rank(F) = 2,秩亏、不可逆。 继承E的秩特性,求解后必须强制约束秩为 2 去噪。整体自由度:7
-
单应矩阵H: rank(H)=3,满秩、可逆。 平面投影是一一映射,可做反向图像变换自由度:8个自由度
5、约束形式与几何含义深度解析
| 矩阵 | 主流求解算法 | 前置条件 |
|---|---|---|
| E | 5 点法(非线性)、8 点法(先求 F 再反推 E) | 已知 / 预先求解相机内参 |
| F | 8 点法(线性)、7 点法、RANSAC 鲁棒求解 | 无需内参,直接用像素坐标 |
| H | 4 点法(DLT 直接线性变换)、RANSAC | 空间点共面、无三点共线 |
6、面试高频问题
问题 1:E和 F最核心区别?
答:E 定义在归一化坐标 ,仅描述两相机相对运动,与内参无关;
F定义在像素坐标,融合了相机内参和相对运动,可直接作用于原始图像。二者秩均为 2,都存在尺度歧义。
问题 2:什么时候用 H,什么时候用E/F?
答:空间点共面 (标定板、墙面、文档)用单应矩阵 H;任意三维立体场景 (重建、SLAM、双目测距)用本质 / 基础矩阵 E/F。
问题 3:为什么相机标定不用 E/F而用 H?
答:E/F有尺度歧义,无法得到标定板真实物理尺寸;H基于平面约束,可解出带真实尺度的相机位姿与内参,满足标定需求。
问题 4:三个矩阵秩分别是多少?可逆吗?
答:E、F秩为 2,秩亏、不可逆;H秩为 3,满秩、可逆。
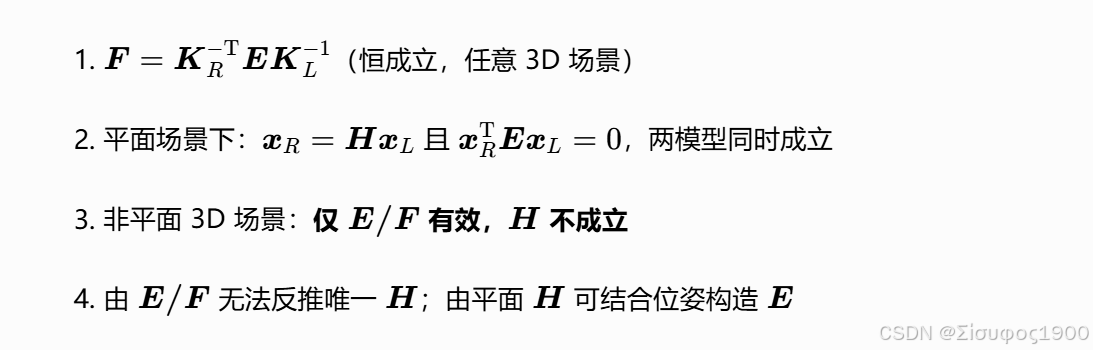
问题 5:平面场景下三个矩阵是否同时成立?
答:是。平面场景既满足共面投影关系x_R=Hx_L,也满足对极约束 x_R^T Ex_L=0。
7、整体逻辑链路总结
- 运动层面:两相机相对旋转 + 平移 -》构造E(纯运动)
- 像素层面:E结合相机内参 -》得到 F(运动 + 镜头)
- 平面约束:空间点强制共面 -》得到 H(平面投影变换)
三者根源都是相机针孔成像模型,只是附加约束、坐标域、适用场景不同;也是双目标定、矫正、匹配、重建、图像拼接等视觉任务的三大数学基石。
8、应用
- 基础矩阵 F :管像素匹配约束,找极线、筛误匹配,不用内参;
- 本质矩阵 E :管相机相对运动,分解旋转平移,是 3D 重建、双目外参的基础,需要内参;
- 单应矩阵 H :管平面透视变换,做图像矫正、图像拼接、相机标定,依赖共面假设,能恢复真实尺度
-
相机标定流程 棋盘格(平面)→ 用H 求初始内参 + 位姿 → 位姿作为初值 → 计算 E/F → 送入 BA 全局优化,得到最终内外参。
-
双目立体重建流程 标定得到内外参 → 由外参构造 E → 推导F得到极线约束 → 双目矫正 → 极线约束下做立体匹配 → 三角测距生成点云。
-
图像拼接 / 文档矫正 场景为墙面 / 纸张(平面)→ 直接用H做透视变换,完全不需要 E/F。
-
未知相机参数的图像匹配 直接用 F 做极线约束筛除误匹配,不使用E(缺内参)、不使用 H(非平面)