一、MRI 机器人驱动核心技术痛点
3T 磁共振腔内介入机器人研发存在两大硬件瓶颈:常规步进、直流电机含有铁磁材质,置入强磁场环境会产生大面积图像伪影,干扰扫描成像;搭配齿轮传动机构存在传动背隙、响应滞后,难以搭建高精度串联弹性执行器(SEA)完成生物组织柔顺力控交互,大幅限制 MRI 引导微创手术机器人算法迭代。
2026 年 IEEE/ASME Transactions 发布编号 11397855 顶刊论文,加州伯克利团队推出紧凑型 MRI 兼容 SEA 模组,整套力控驱动核心采用 Tekceleo 超声波压电电机 WLG-75-R,为无磁力控医疗机器人提供标准化硬件路径。

二、IEEE 11397855 论文 SEA 模组核心设计
整套串联弹性执行器采用传动式力感知架构,在减速箱体与 WLG-75-R 电机壳体之间布置 4 组标准化压缩弹簧,依托 Tekceleo 压电电机直驱特性消除齿轮间隙。硬件实测模组峰值输出扭矩可达 0.96 N・m,最大输出角速度 5.2 rad/s;配套基于扰动观测器的专用扭矩控制器,在高低阻抗物体交互工况下,稳态误差控制在额定扭矩 2.5% 以内,5% 调节时间仅 0.05s,整套设备可在 3T 磁共振环境全程稳定运行,无成像干扰。
方案可落地的关键在于 Tekceleo WLG-75-R 压电电机无磁原生硬件架构。
三、Tekceleo 超声波压电电机(WLG-75-R)核心硬件优势
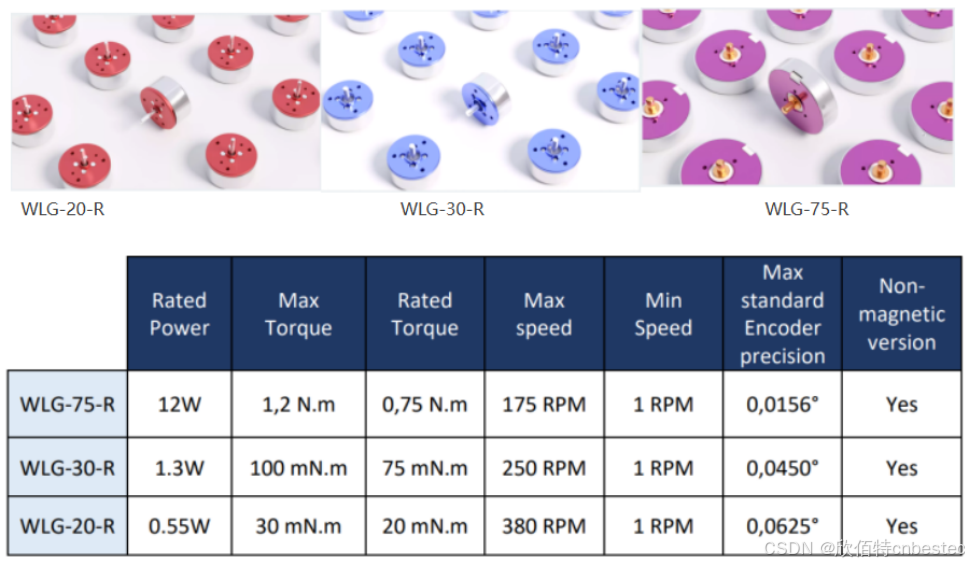
作为 Tekceleo 压电电机系列大扭矩主力型号,WLG-75-R 专为强磁场、高精度力控科研场景开发:
- 全域无磁构造,运行磁特征低于 3nT,原生适配 3T 磁共振设备,无需额外电磁屏蔽改造;
- 行波压电直驱结构,取消齿轮减速机构,不存在传动背隙,响应速度<500μs,满足 SEA 高频柔顺力控闭环需求;
- 75mm 紧凑机身,额定功率 12W,峰值扭矩 1.2N・m,内置位置、速度双编码器,原生支持高精度闭环控制;
- WLG 全系列模块化选型(WLG-20-R/WLG-30-R/WLG-75-R),配套标准化评估套件、STM32 控制器与开源调试软件,缩短机器人整机集成开发周期。
四、学术与工程落地场景
当前 Tekceleo 压电电机已进入全球 30 余所顶尖高校实验室,累计产出 44 篇同行评审学术论文,覆盖伯克利、伦敦大学、台湾大学、MIT 等机构;同时作为欧盟 PROMI 磁共振机器人专项指定驱动硬件。除 MRI 介入 SEA 执行器开发外,还适配航天微小卫星姿态定位、精密光机校准、微创导管机器人、具身柔顺抓取数据集采集等研发项目。

完整顶刊论文查阅:https://ieeexplore.ieee.org/abstract/document/11397855
欢迎关注 "欣佰特科技" ,持续为大家带来 "具身智能领域" 前沿技术及应用!详情可邮件咨询 ++++sales@cnbestec.com++++