导语 :拧瓶盖、抓试管、捏鸡蛋------这些人类凭手感轻松完成的动作,对机器人而言却难如登天。核心瓶颈之一,是机器人难以精确感知"滑移":物体在指尖向哪个方向滑了?滑了多少毫米?现有触觉传感器大多只能测"按了多大力",对滑移的感知精度严重不足。近日,浙江大学汪延成教授团队在《Nature Communications》上发表了一项突破性成果------一款受向日葵种子排列启发的"电子指纹"传感器,能以0.85°的方向精度和0.091毫米的位移分辨率精确捕捉滑移矢量,让机器人真正拥有了"手感"。
一、触觉界的"方向感缺失":能测按压,测不准滑移
在机器人灵巧操作中,滑移感知是决定成败的关键变量。抓取易碎物品时,需要检测到微滑移的瞬间增加夹持力;精密装配时,需要感知零件在指尖的微小位移来调整姿态;远程遥操作时,需要将手指的滑动动作精确映射为机械臂的运动。
但现有触觉传感器面临一个共同的"方向感缺失"困境:它们大多擅长测量法向力(按压的力度),但在测量剪切力或滑移时,通常只能依赖算法间接推算------比如用深度学习分析触觉图像的变化,或用频域分析提取滑移特征。这些间接方法的精度有限、延迟较高,且容易受到法向力变化、摩擦系数差异和温度漂移的干扰。
更深层的问题出在物理层面。传统触觉传感器的像素阵列大多采用矩形或圆形规则排列,这种布局存在"中心拥挤、边缘稀疏"或"角点浪费"的结构性缺陷。当物体在传感器表面滑动时,不同方向上参与计算的像素密度不一致,导致滑移矢量的空间分辨率天然不均------沿某些方向的测量精度高,沿另一些方向的精度低。这不是算法问题,而是传感器本身的几何布局问题。
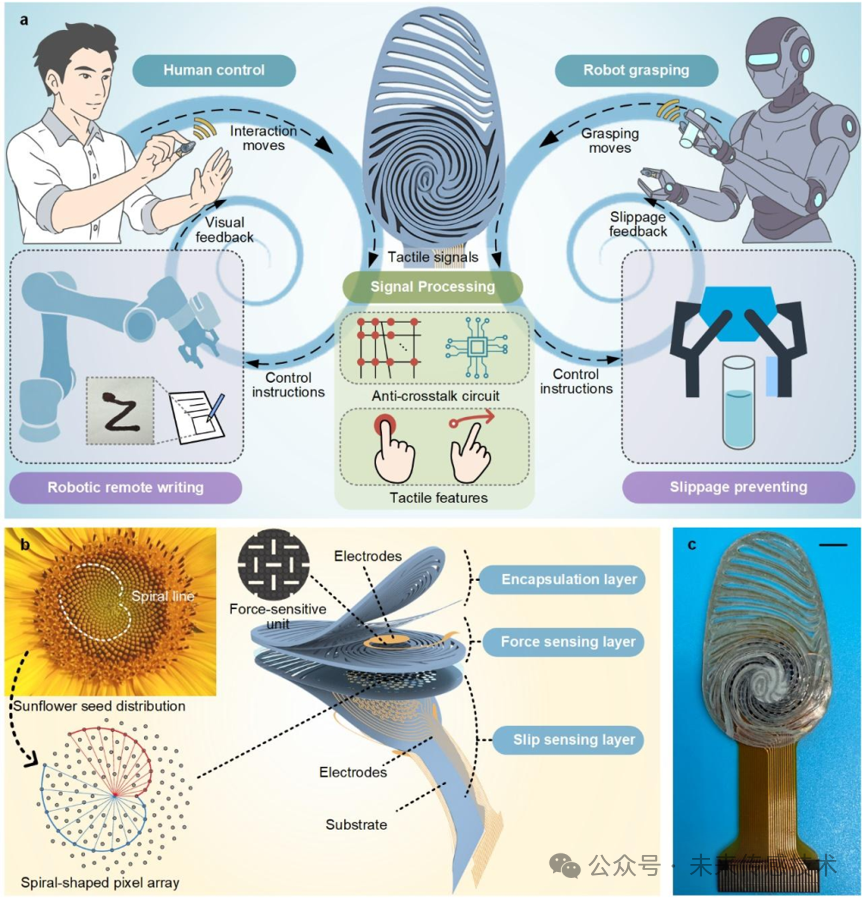
图1 示意图展示了电子指纹设备的应用与结构设计。 (a) 电子指纹的工作原理。传输的触觉信号可用于机器人远程控制和机器人抓取等应用场景。 (b) 电子指纹的结构设计。力传感单元采用空心结构与切纸艺术图案设计,12 × 12的触觉像素阵列以费马螺旋模式排列,灵感来源于向日葵种子的形状。(c) 电子指纹的照片。比例尺:5 mm。
二、向向日葵借"数学":费马螺旋的黄金解法
汪延成团队的解题思路独辟蹊径:不是设计更复杂的算法,而是从像素的物理排布入手,将滑移感知从"间接推算"变成"直接测量"。
灵感来自植物学中最经典的案例------向日葵种子排列。向日葵的花盘并非简单地将种子按同心圆或矩形网格排布,而是遵循费马螺旋:每一颗种子落在由黄金分割比(约0.618)决定的螺旋线上。这种排布方式能以最均匀的方式填充圆形空间,无论在哪个方向上,种子的分布密度都高度一致。
研究团队将这一数学原理迁移到了触觉传感器设计中。他们将144个(12×12)触觉像素以费马螺旋模式排列。通过"空间离散度"指标系统评估,当螺旋线特征参数比φ₁/φ₂趋近0.618时,像素在整个圆形传感区域内的分布最为均匀------没有中心拥挤、没有边缘稀疏、没有角点浪费。
这种"各向同性"的几何特性,是滑移矢量高精度测量的物理基石。 无论物体向哪个方向滑动,参与计算的有效像素密度完全一致,从算法根源上消除了系统误差。这也解释了为什么传统矩形阵列在斜向45°滑移时的精度往往低于水平/垂直方向------而费马螺旋阵列不存在这个弱点。
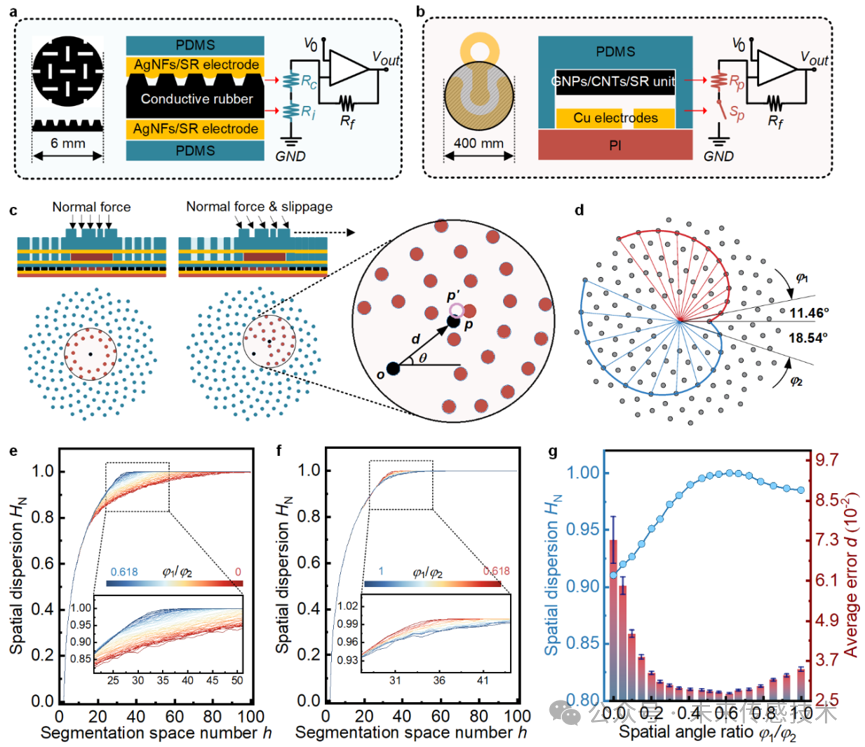
**图2 触觉传感器电子指纹设备的工作原理。**示意图展示了(a) 力敏单元和(b) 滑移敏感像素的电路及工作原理。(c) 像素阵列用于滑移检测的工作原理。当仅施加法向力时,力中心的投影区域(左侧部分),以及同时施加法向力和滑移时的投影区域(中间部分)。在右侧放大部分,p和p'分别为投影区域的实际和估计中心点,o为原点,d和θ分别为滑移偏移量和角度。(d) 像素阵列的分布模式。φ1和φ2为费马螺旋线的特征参数。具有特征参数φ1/φ2低于(e)和高于(f) 0.618的费马螺旋图案像素阵列的归一化空间分散。(g) 具有不同空间角比的螺旋图案的空间分散和平均误差。误差条表示标准偏差(s.d.),实验重复3次(n = 3)。
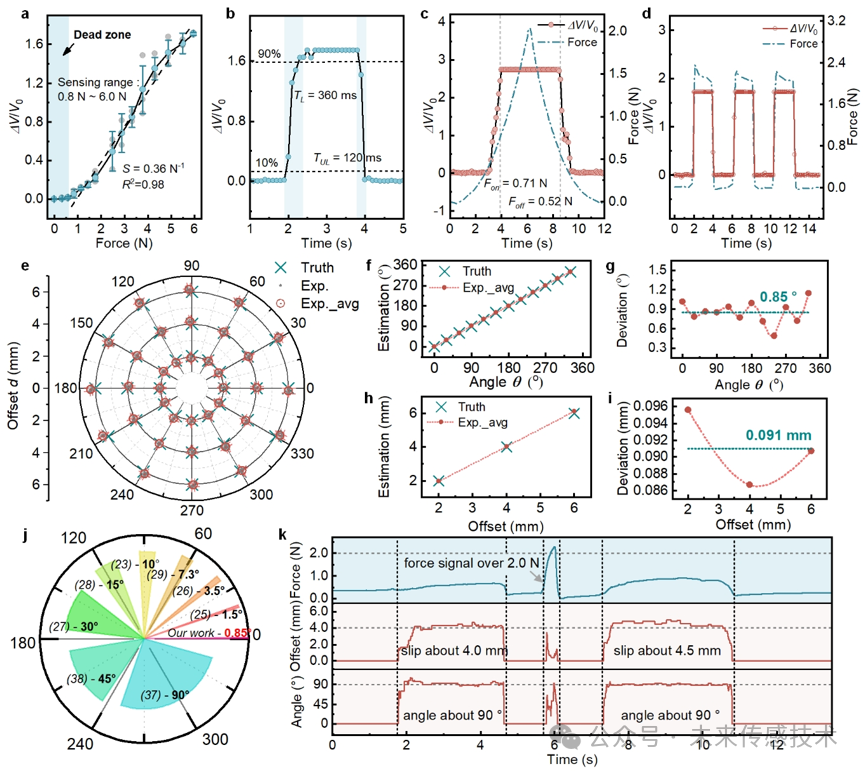
图3 触觉传感器的电子指纹电气特性。(a) 力敏单元的正常力灵敏度(S)。误差条表示标准差(s.d.),实验重复3次(n = 3)。(b) 力敏单元的动态响应。TL和TUL分别为加载和卸载时间。(c) 每个像素单元的激活(Fon)和失活(Foff)力阈值。(d) 每个像素单元的动态响应。(e) 不同角度(0-360°)和幅度(2-6 mm)下真实与实验滑移的比较。误差条表示标准差(s.d.),实验重复5次(n = 5)。(f) 滑移方向从0°到330°的标定结果,间隔为30°。(g) 滑移方向的偏差和分辨率。(h) 滑移距离的标定结果,间隔为2 mm。(i) 滑移距离的偏差。(j) 本研究与其他已报道工作23,26-29,37,38在滑移检测中的剪切角分辨率比较。(k) 设备在同时施加正常力和滑移时的传感性能。
三、三层夹心结构:用机械解耦替代算法推算
有了均匀的像素阵列,还需要一个能精确传递滑移位移的机械结构。研究团队设计了一套仿生三层架构。
上层是封装与增摩层 :表面设计有仿人类指纹的凹槽纹路,增大接触摩擦,确保滑移发生时物体与传感器表面之间不打滑。中层是力敏感层 :由压阻橡胶材料制成,可以在上下方向浮动,负责测量法向力。底层是滑移像素阵列:144个像素以费马螺旋排列,每个像素是一个"悬浮的导电橡胶圆点",下方悬空横跨一对电极。平常状态下圆点与电极断开(逻辑0),受压后接触导通(逻辑1)。
这个设计的精妙之处在于:它将滑移感知从"模拟量"转换成了"数字量"。不是测量每个像素的力大小,而是判断每个像素"是否被压到"。当物体在传感器表面滑动时,中层相对于底层产生错位,受压区域在底层像素阵列上的投影中心发生偏移。通过计算所有导通像素的加权平均坐标,就能直接解算出滑移的位移量(d)和方向角(θ)。
更关键的是,三层结构实现了机械层面的力-滑移解耦。当仅有法向力作用时,力中心投影区域位于原点,滑移信号理论上为零;当法向力和滑移同时作用时,投影中心偏移,滑移信号随之产生。实验证明,施加法向力时滑移信号波动极小,证明三层结构有效隔离了法向力对滑移测量的机械干扰------这是算法解耦方案难以做到的。
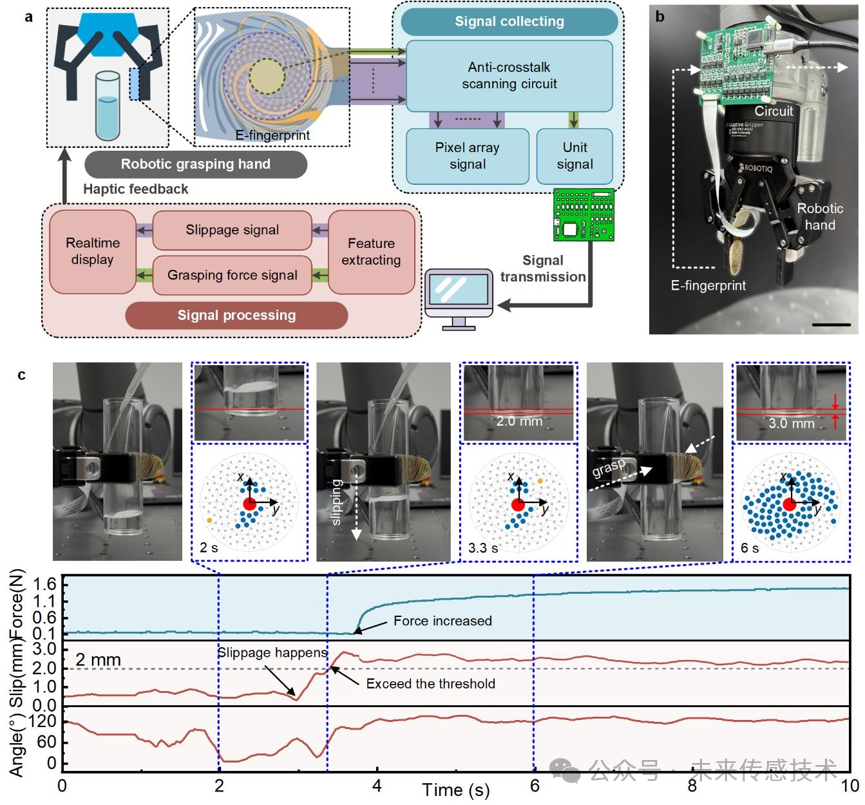
图4 机器人抓取过程中的滑动防止。(a) 集成了电子指纹的机器人示意图。(b) 安装在夹持器上的电子指纹照片。比例尺:25毫米。(c) 在向试管中持续添加水时,机器人抓取过程中的力和滑动信号。滑动发生前的稳定抓取(左侧部分)。当位移超过2毫米的阈值时发生滑动(中间部分)。在将滑动位移控制在总值3毫米以内后再次实现稳定抓取(右侧部分)。
四、硬核性能:角度误差不到1°,位移分辨率接近触觉极限
这套"结构仿生+数学优化+机械解耦"的方案,最终用一组令人印象深刻的数据证明了自己的价值。
滑移方向精度达到0.85°。研究者在0°到360°范围内以30°为间隔进行了系统标定,实测方向与真实方向的偏差均值不足一度。这一指标远超现有文献报道的同类器件------在补充对比中,此前最先进的滑移传感器方向分辨率通常在3°-10°量级。
滑移位移分辨率达到0.091毫米。这大致相当于人类指纹脊线间距的精度,接近皮肤触觉分辨的物理极限。法向力灵敏度为0.36 N⁻¹,覆盖日常抓握的力度范围(约0.8-6N)。
在动态响应方面,每个像素的响应时间小于100毫秒,满足实时反馈的需求。为克服密集像素阵列的信号串扰,团队还专门设计了等电位屏蔽电路,确保144个像素在扫描时相互不受干扰。
还有一个值得注意的细节是鲁棒性验证:实验中向试管持续注水以逐渐增加负载,系统在3.3秒时检测到滑移位移超过2.0毫米阈值并触发警报,3.7秒内将夹持力从0.15 N提升至1.1 N。整个过程的总滑移被限制在3.0毫米以内。这不是靠"死力硬夹",而是靠滑移信号作为触发条件动态调整力控------这正是人类抓取的本能逻辑。
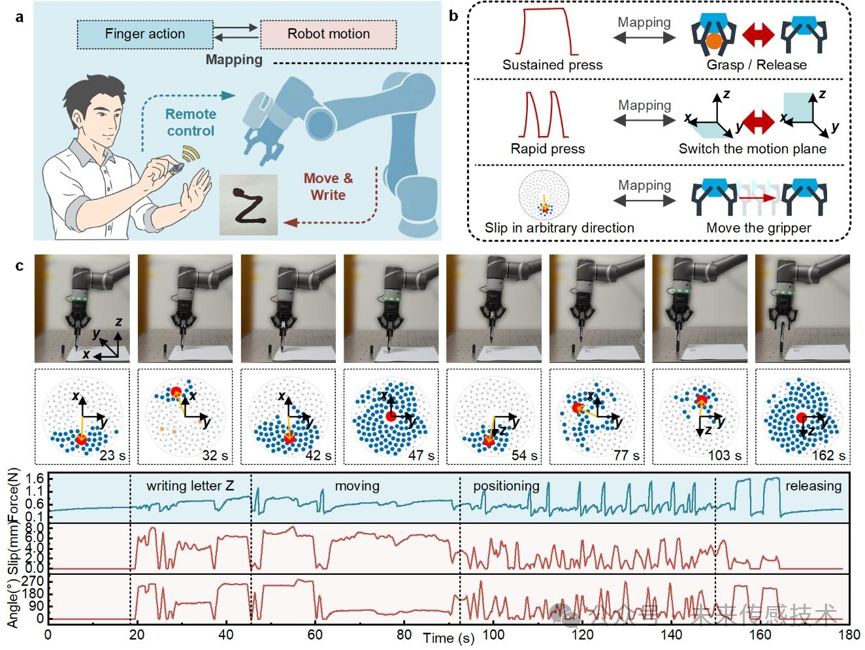
图5 机器人远程控制应用使用电子指纹设备。(a) 人机交互的示意图。(b) 手指动作与机器人运动之间的映射关系。持续按压控制机器人夹具的抓取状态。快速按压可以切换运动平面。滑动信号迫使夹具朝特定方向移动。(c) 机器人远程精细操作中的力和滑动信号。书写字母"Z"(20秒至45秒)。切换移动平面并快速移动夹具(45秒至93秒)。精细调整夹具位置(93秒至150秒)。释放夹具(150秒至180秒)。
五、两种交互范式:从防滑抓取到"隔空写字"
论文展示了两种典型的应用范式,分别对应机器人自主操作和远程人机交互。
范式一:自适应防滑抓取。 机械手抓取不断注水的试管,重力逐渐增大。当系统检测到滑移位移超过阈值时,自动增加夹持力直至滑移停止。这一闭环逻辑展示了从"被动感知"到"主动调控"的完整通路------机器人不再需要人类预设夹持力,而是像人一样"摸着情况调力道"。
范式二:远程精细遥操作。 将电子指纹传感器佩戴在食指指腹上,用拇指搓动。持续按压控制夹爪开合,快速点按切换操作平面(水平/垂直),滑动控制机械臂移动方向与速度。操作者利用这套映射逻辑,远程控制机械臂将一支笔精准插入笔帽,并成功写出了字母"Z"。这意味着传感器不仅能检测"有没有滑",还能输出精确的矢量位移信号,作为三维操纵杆使用。 对于远程手术、核废料处理、太空作业等需要精密遥操作的场景,这种"手指级"的控制精度有极高的应用价值。
六、局限与展望
作为严谨的技术解析,以下客观存在的局限也值得讨论:
材料迟滞效应:由于使用了粘弹性橡胶,力敏单元的加载和卸载曲线存在不重合现象。虽然作者提到可用自补偿算法修正,但在高频动态交互中(如快速敲击、振动感知),迟滞是否会影响实时精度仍需进一步验证。
法向力与滑移的细微耦合:虽然三层结构实现了机械解耦,但实验中仍可观察到加载法向力的瞬间会引起滑移信号的微弱波动。这是因为按压导致橡胶产生泊松效应,中层在垂直方向的形变不可避免地会传递到横向。
制造精度依赖:像素的感知依赖于"悬浮导电圆点"与下方电极的精确对中。柔性电路板在反复弯折后可能产生微小形变,导致初始状态下的"零漂"。批量生产时可能需要逐个校准,这是走向量产需要解决的工程问题。
尽管如此,这项研究的核心贡献是明确的:它证明了通过优化传感器本身的几何结构,可以从物理层面突破滑移测量的精度瓶颈,而不只是依赖更复杂的后处理算法。 当传感器本身就具备"各向同性"的空间分辨能力,高精度的滑移矢量感知就从"需要算出来"变成了"直接读出来"。
对于正在追求灵巧操作能力的具身智能领域而言,这种"硬件层面的降维打击"或许比任何算法优化都更有根本性的推动力。
论文信息
-
标题:An electronic fingerprint device based on spiral patterned tactile pixel array for augmented human-machine interactions
-
作者:Jin, J. et al.
-
期刊:Nature Communications (2026)