前言
在上一期我们讲了 AUTOSAR OS 的核心本质:
OS不是干活的,它是"调度时间的人"
但一个很自然的问题是:
既然OS不处理CAN、不处理通信、不跑业务,那它到底怎么和CanIf、PduR、Com这些模块"配合工作"?
如果把AUTOSAR软件栈拆开看,其实会发现:
OS不是一个模块,而是所有模块运行方式的"底层规则"
它像空气一样:
- 看不见
- 不直接参与数据处理
- 但所有模块都离不开它
在AUTOSAR架构里,如果说CanIf、PduR、Com这些模块是"功能执行者",那么AUTOSAR OS就是那个真正决定:
这些功能"什么时候执行、谁先执行、执行多久"的幕后控制器
先建立一个整体认知:AUTOSAR不是"调用关系",而是"时间驱动系统"
传统软件思维是:
A函数 → B函数 → C函数但AUTOSAR车载系统的真实模型是:
事件 / 中断 → OS调度 → Task执行 → BSW函数被动运行换句话说:
AUTOSAR不是"函数在跑",而是"时间在推动函数运行"核心认知升级:
| 传统理解 | 真实运行方式 |
|---|---|
| 函数调用链 | 时间片调度 |
| 模块顺序调用 | Task被触发执行 |
| 软件主动运行 | 事件驱动 + OS调度 |
AUTOSAR OS的真实角色:不是"操作系统",而是"时间调度器"
AUTOSAR OS本质上是一个:
静态配置的实时任务调度器(Static Real-Time Scheduler)
它不做这些事情:
- 不处理CAN数据
- 不解析信号
- 不做通信协议
- 不运行业务逻辑
它只做一件事:
✔ 管理"CPU在什么时间执行哪个Task"
OS的三大核心能力
1. 时间维度控制
- 10ms / 20ms / 100ms任务周期
- tick驱动调度
2. 优先级控制
- 高优先级任务抢占低优先级任务
3. 事件驱动控制
- ISR / Event触发Task执行
从CAN报文开始:看OS如何串起整个链路
我们用一个真实工程中最常见的路径讲清楚:
CAN报文 → 应用层信号更新
Step 1:CAN硬件接收
CAN控制器接收到报文:
- 写入RX FIFO
- 触发硬件中断
👉 此时OS还没有参与
Step 2:进入ISR(中断)
进入AUTOSAR Category 2 ISR:
典型行为:
- 读取CAN数据
- 调用 CanIf_RxIndication()
- 或放入Driver buffer
👉注意:ISR不能做复杂处理
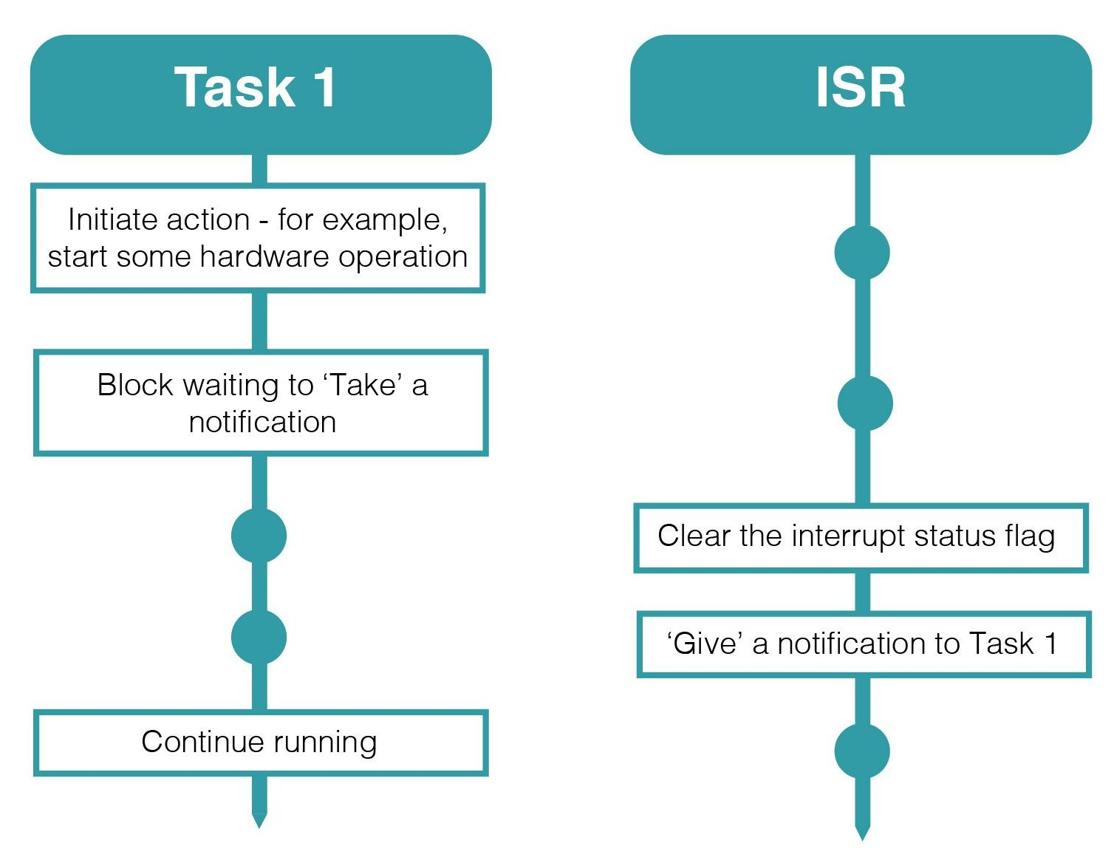
Step 3:OS被"间接触发"(关键点)
很多人误以为:
OS直接处理CAN
实际上不是。
ISR通常做的是:
- ActivateTask()
- SetEvent()
- 或触发Com_MainFunction运行
举个真实例子:
ISR_CAN_RX()
{
CanIf_RxIndication();
ActivateTask(ComTask);
}👉 OS只是"被通知":该执行某个Task了
Step 4:OS调度Task执行
OS开始介入:
- 检查READY队列
- 比较优先级
- 决定是否抢占
- 执行Task上下文切换
注意:
OS不会执行COM函数,而是:
执行"包含COM函数的Task"
Step 5:BSW模块开始真正工作
在Task上下文中执行:
COM模块:
- Com_RxProcessing
- Signal解包
- 更新Signal buffer
PduR模块:
- 路由PDU
- 转发到目标模块
CanIf模块:
- 接收/发送队列处理
关键点来了:OS从来不"调用"BSW,而是"唤醒"BSW
这是AUTOSAR最容易误解的一点:
错误理解:
OS → 调用 COM
OS → 调用 PduR
OS → 调用 CanIf正确理解:
ISR / Event → OS激活Task → Task执行BSW MainFunction本质区别:
| 模式 | AUTOSAR OS |
|---|---|
| 调用链 | ❌ 不存在 |
| 执行驱动 | ✔ Task触发 |
| 控制核心 | ✔ Scheduler |
BSW模块是"被动执行者",OS是"调度器"
我们拆开几个典型模块来看:
1. CanIf:靠Task驱动执行
CanIf不会自己跑,它依赖:
- CanIf_MainFunction_Rx
- CanIf_MainFunction_Tx
这些函数在哪里跑?
👉 Task里(由OS调度)
2. PduR:路由的"周期搬运工"
PduR也不主动工作:
- 依赖周期Task调用
- 或被上层触发Task执行
3. COM:信号更新核心
COM模块:
- 接收Signal
- 更新缓存
- 触发RTE
但它本身:
👉 只是Task中的函数
4. RTE:连接应用层,但仍依赖OS
RTE提供:
- Rte_Read
- Rte_Write
- Runnable调度
但Runnable执行仍然:
👉 由OS Task触发
OS + BSW的真正关系模型(核心)
我们可以用一句话定义:
AUTOSAR OS = BSW模块运行的"时间容器"
结构本质:
App (Runnable)
↑
RTE
↑
+-------------+
| TASK | ← OS调度
+-------------+
↑
COM / PduR / CanIf (函数)
↑
Driver / ISR一个完整"真实车载10ms周期系统"运行过程
我们模拟一个10ms CAN通信系统:
① 1ms Tick中断
- OS Counter++
- Alarm检查
② 10ms任务触发
- Task_10ms → READY
③ OS调度执行
- Task_10ms获得CPU
- 开始执行BSW MainFunction
④ BSW周期处理
Task中执行:
- Com_MainFunctionRx()
- PduR_MainFunction()
- CanIf_MainFunction()
⑤ 异步CAN事件发生
- ISR触发
- ActivateTask(ComTask)
⑥ Task抢占执行
- 高优先级CAN Task抢占当前Task
- 立即处理数据
⑦ 应用层读取信号
- RTE触发Runnable
- 读取最新Signal
👉 整个过程没有"主动调用链",全部由OS控制节奏,事件 + OS调度 + Task执行
OS的三个"隐形能力"(非常关键)
AUTOSAR OS最核心的价值,其实不是Task,而是三件隐形能力:
1. 时间控制能力(Timing Determinism)
- 10ms / 20ms / 100ms任务,任务严格周期化
- 精确周期控制,jitter可控
2. 抢占能力(Preemption)
- 高优先级任务随时插队
- 保证实时性
3. 事件驱动能力(Event Trigger)
- ISR触发Task
- Event唤醒Extended Task
为什么说OS是"串起整个AUTOSAR的胶水"?
因为:
👉 所有BSW模块都必须"挂在Task上运行"
没有OS:
- COM不会刷新
- PduR不会路由
- CanIf不会处理
- RTE不会调度Runnable
换句话说:
BSW是功能,OS是让功能发生的时间机制
工程上最容易踩的坑(非常重要)
很多实际项目问题,本质都是OS理解错误:
坑1:Task优先级设计错误
结果:
- CAN延迟
- 信号丢失
- ECU响应变慢
坑2:周期Task太重
结果:
- CPU overload
- 10ms变20ms
坑3:ISR逻辑过重
结果:
- 中断阻塞
- 系统抖动
坑4:BSW放错Task
结果:
- COM更新延迟
- PduR路由不及时
AUTOSAR OS与BSW关系可以浓缩为三句话:
- OS不处理数据,只控制时间
- BSW不主动运行,只被Task驱动
- ISR负责触发,OS负责调度,Task负责执行
本期总结
OS是AUTOSAR的"灵魂"
因为:
没有OS,所有BSW模块都只是"不会动的函数库"
OS让系统具备:
- 时间性
- 实时性
- 可预测性
🚗 一句话总结:
AUTOSAR OS不是运行软件的系统,而是控制"软件在时间上如何运行"的调度核心
👉下期预告
《AUTOSAR OS调度深水区:Task如何设计才不会拖垮整车?优先级、周期、CPU负载的真实工程取舍》