FS-04 功能安全ISO26262之危害分析与风险评估(HARA)工程实践深度解析
FS-04 功能安全ISO26262之危害分析与风险评估(HARA)工程实践深度解析
系列导航表
| 系列 | 文章数 | 状态 | 专栏 |
|---|---|---|---|
| FS功能安全 | FS-01~FS-20 | 进行中 | 汽车功能安全: ISO26262深入理解 |
| IF芯片 | IF-01~IF-14 | 已完结 | 英飞凌AURIX实战系列 |
| AP系统 | AP-01~AP-15 | 已完结 | AUTOSAR AP实战指南 |
一、引言:为什么HARA是功能安全的起点
1.1 HARA在安全生命周期中的核心地位
危害分析与风险评估(Hazard Analysis and Risk Assessment,HARA )是ISO 26262功能安全生命周期的起点和基石。根据ISO 26262-3:2018 Clause 7的定义,HARA是识别和分类相关项危害事件,并制定安全目标的系统性方法。
来源依据:ISO 26262-3:2018 Clause 7.1 "The hazard analysis and risk assessment shall be performed to identify and categorize the hazards of the item."
HARA的输出直接决定了整个产品开发的安全严格程度。从HARA分析中得出的**安全目标(Safety Goals)**是最高层级的安全要求,所有后续的系统设计、硬件开发、软件实现都必须追溯到这些安全目标。
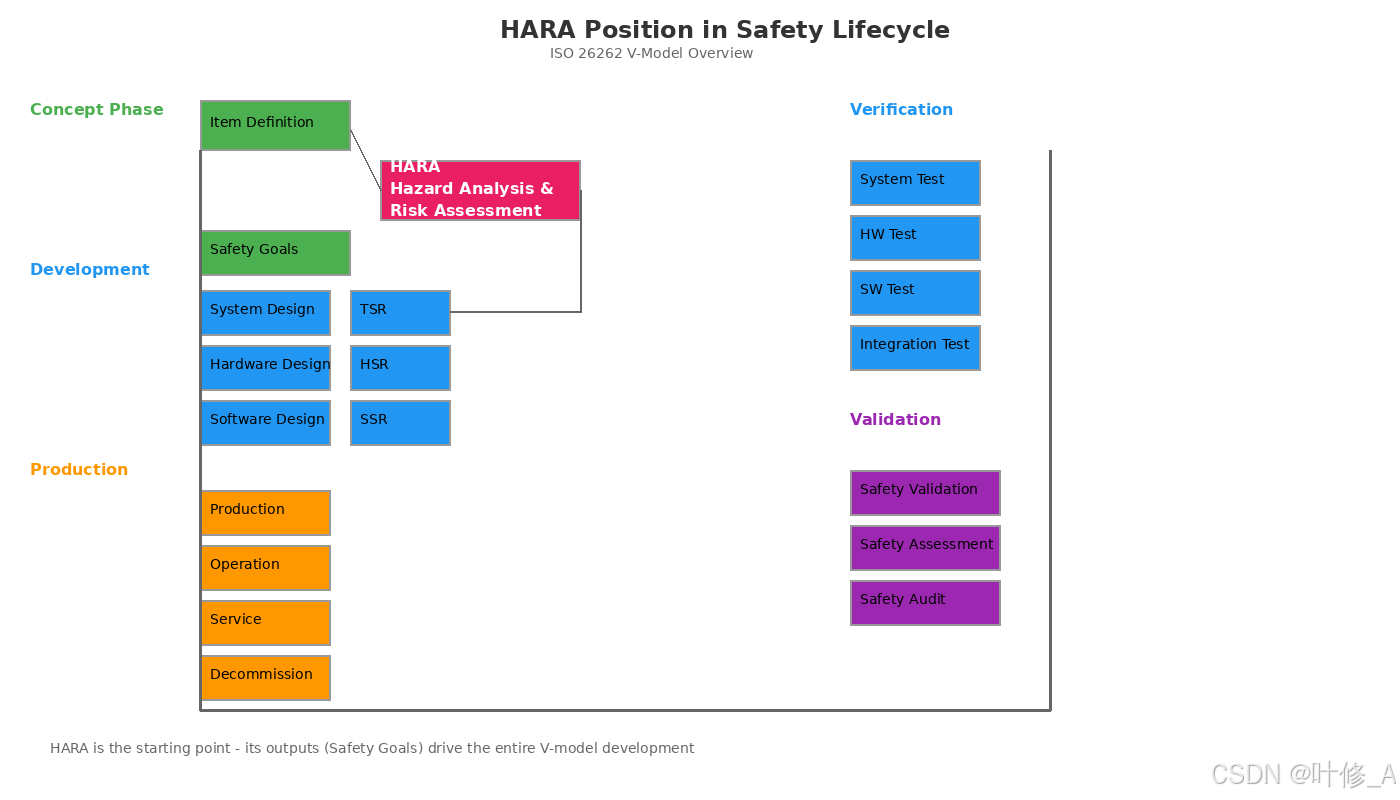
如上图所示,HARA位于概念阶段的起始位置,其输出驱动整个V模型开发流程:
- 左支(开发):HARA → 安全目标 → 技术安全需求 → 系统/硬件/软件设计
- 右支(验证):每个开发阶段都有对应的验证活动,确保满足安全目标
1.2 HARA与其他安全活动的关系
HARA不是孤立的活动,它与多个安全活动紧密关联:
- Item定义:HARA的输入,定义相关项的边界、功能和接口
- 功能安全概念(FSC):HARA的输出之一,描述如何实现安全目标
- 技术安全需求(TSR):从安全目标导出,是HARA到系统设计的桥梁
- 安全确认:验证最终产品是否满足HARA阶段制定的安全目标
来源依据:ISO 26262-3:2018 Clause 7.2 "The hazard analysis and risk assessment shall be based on the item definition."
1.3 HARA的核心输出
HARA分析的完整输出包括:
| 输出工作产品 | 描述 | 用途 |
|---|---|---|
| HARA报告 | 完整的分析过程和结果文档 | 安全档案的核心组成部分 |
| 危害事件清单 | 所有识别的危害事件及其属性 | 后续分析的输入 |
| ASIL分配表 | 每个危害事件对应的ASIL等级 | 确定开发严格程度 |
| 安全目标 | 最高层级安全要求 | 驱动整个产品开发 |
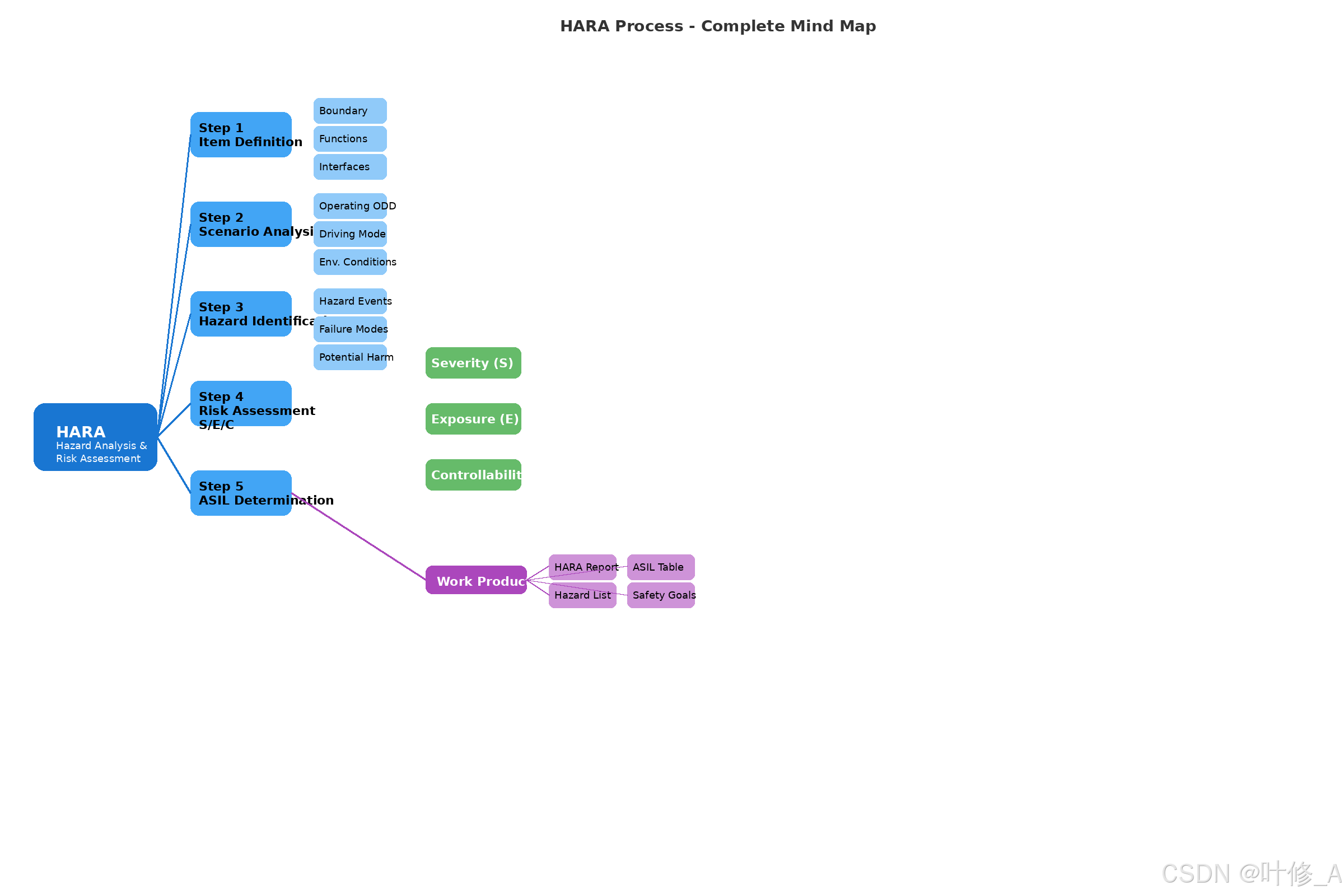
二、HARA完整流程:五步法详解
2.1 Step 1:Item Definition(相关项定义)
来源依据:ISO 26262-3:2018 Clause 5
Item定义是HARA的输入,必须明确定义相关项的:
- 边界定义:相关项与外部环境的接口边界
- 功能定义:相关项应提供的功能
- 接口定义:与其他相关项的交互接口
- 法规要求:必须满足的法规标准
2.1.1 Item定义的关键要素
功能描述:
- 相关项应实现的核心功能
- 功能的运行条件和约束
- 功能与用户期望的对应关系
边界定义:
- 整车层面的边界
- 与其他ECU的交互边界
- 与传感器/执行器的接口边界
假设条件:
- 对驾驶场景的假设
- 对驾驶员行为的假设
- 对环境的假设
来源依据:ISO 26262-3:2018 Clause 5.2 "The item definition shall include a description of the boundaries of the item."
2.2 Step 2:场景分析
来源依据:ISO 26262-3:2018 Clause 7.3
场景分析是HARA中最耗时的步骤,需要系统性地枚举所有可能的运行场景。
2.2.1 运行场景(ODD)枚举
运行设计域(Operational Design Domain,ODD)定义了系统工作的条件范围:
| 场景维度 | 示例 | 分析要点 |
|---|---|---|
| 道路类型 | 高速/城市/乡村/停车场 | 不同道路的操控特性 |
| 环境条件 | 晴/雨/雪/夜间/白天 | 对传感器和执行器的影响 |
| 交通状况 | 拥堵/畅通/低速跟随 | 事故场景的概率分布 |
| 驾驶模式 | 起步/加速/匀速/转向/泊车 | 不同操作的失效后果 |
2.2.2 场景分析的完备性保证
为保证场景识别的完备性,建议采用以下方法:
- 顶部向下法:从整车功能出发,逐步细化到具体场景
- 底部向上法:从已知的事故数据库和失效模式出发,逆向构建场景
- 边界分析法:重点关注极端情况和边界条件
来源依据:ISO 26262-3:2018 Clause 7.3.2 "The operational situations shall be identified."
2.3 Step 3:危害识别
来源依据:ISO 26262-3:2018 Clause 7.4
危害识别是将每个运行场景与潜在危害关联的过程。
2.3.1 危害事件的构成要素
一个完整的危害事件描述需要包含:
| 要素 | 描述 | 示例 |
|---|---|---|
| 功能丧失 | 预期的功能无法实现 | 转向助力完全丧失 |
| 功能过度 | 功能超过设计范围 | 转向助力过大 |
| 功能误导 | 提供的功能与预期不符 | 转向方向与指令相反 |
| 功能延迟 | 功能响应时间超出要求 | 转向助力响应延迟 |
2.3.2 失控模式分析
对于每个功能异常,需要分析其对应的失控模式(Loss of Control Mode):
| 失控模式 | 描述 | EPS示例 |
|---|---|---|
| 完全丧失 | 功能完全停止工作 | 电机完全不输出扭矩 |
| 部分丧失 | 功能部分降低 | 助力扭矩降低50% |
| 错误激活 | 不期望的功能被激活 | 无指令时产生助力 |
| 错误输出 | 输出与预期不符 | 助力方向相反 |
2.4 Step 4:风险评估(S/E/C三因子)
来源依据:ISO 26262-3:2018 Clause 7.5
风险评估是HARA的核心步骤,通过三个独立因子量化每个危害事件的风险。
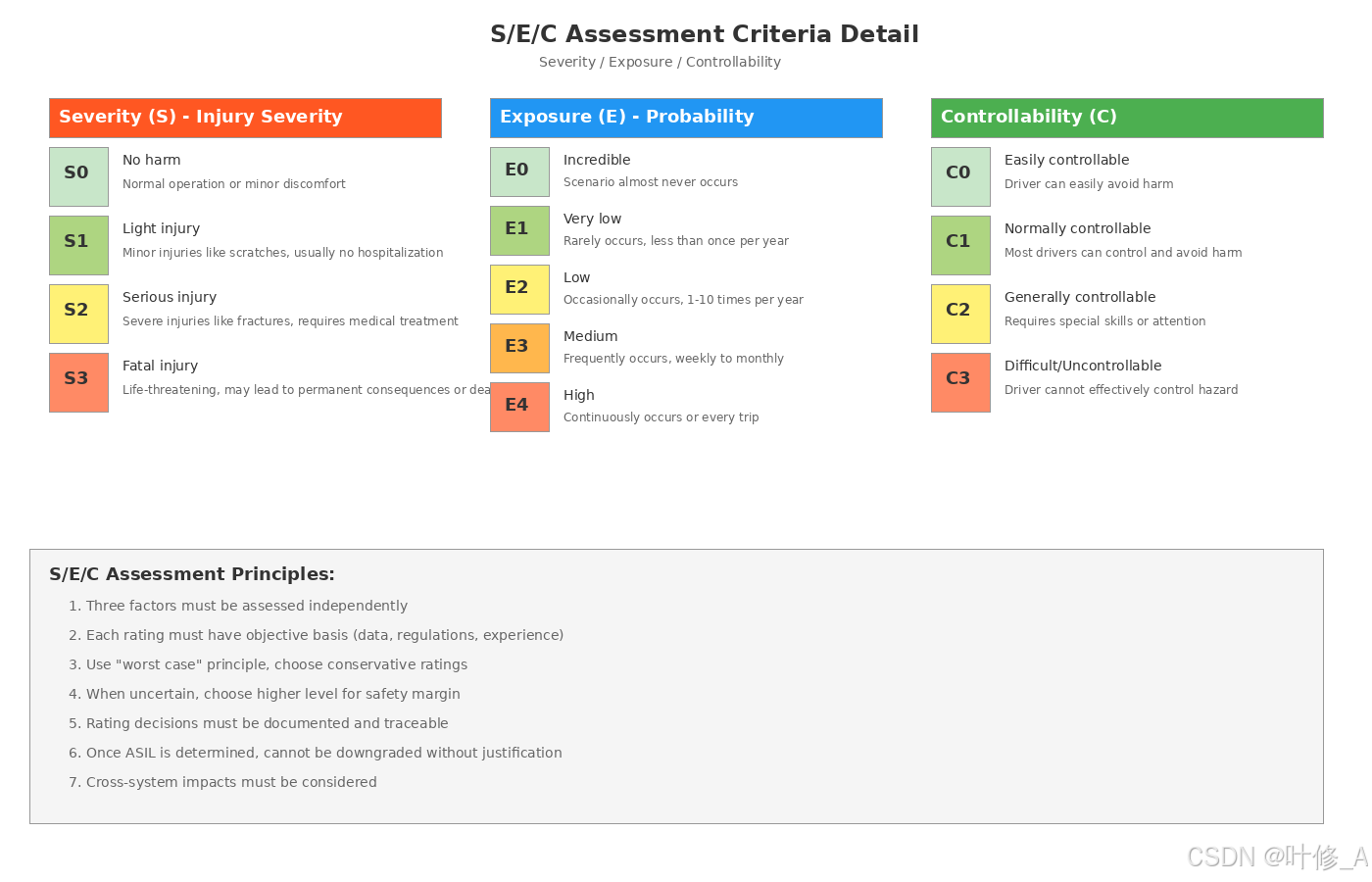
2.4.1 Severity(严重度S)
严重度评估危害事件可能导致的伤害程度:
| 等级 | 名称 | 描述 | 示例 |
|---|---|---|---|
| S0 | 无伤害 | 无任何伤害 | 仪表显示错误 |
| S1 | 轻伤 | 轻微伤害,如擦伤 | 轻微碰撞 |
| S2 | 严重伤害 | 需要医疗干预的伤害 | 骨折 |
| S3 | 致命伤害 | 危及生命或永久性伤害 | 致命伤害 |
2.4.2 Exposure(暴露度E)
暴露度评估运行场景发生的概率:
| 等级 | 名称 | 发生频率 | EPS示例 |
|---|---|---|---|
| E0 | 不可信 | 几乎不发生 | 极端环境 |
| E1 | 极低概率 | 每年少于1次 | 深夜山路 |
| E2 | 低概率 | 每年1-10次 | 城市道路 |
| E3 | 中概率 | 每月1次或更频繁 | 高速行驶 |
| E4 | 高概率 | 每次行程都可能 | 泊车操作 |
2.4.3 Controllability(可控性C)
可控性评估驾驶员避免伤害的能力:
| 等级 | 名称 | 描述 | 要求 |
|---|---|---|---|
| C0 | 容易可控 | 任何驾驶员都能轻易控制 | 无特殊要求 |
| C1 | 一般可控 | 大多数驾驶员能够控制 | 基础安全机制 |
| C2 | 难以可控 | 需要特殊技能或注意力 | 增强安全机制 |
| C3 | 不可控 | 驾驶员无法有效控制 | 最严格安全机制 |
重要原则:S/E/C三因子必须独立评估,不能相互影响。
来源依据:ISO 26262-3:2018 Clause 7.5.1 "The assessment shall consider the three parameters of severity, exposure and controllability independently."
2.5 Step 5:ASIL确定
来源依据:ISO 26262-3:2018 Clause 7.5 and ISO 26262-9:2018 Clause 4
根据S/E/C三因子的评估结果,通过查表法确定每个危害事件的ASIL等级。
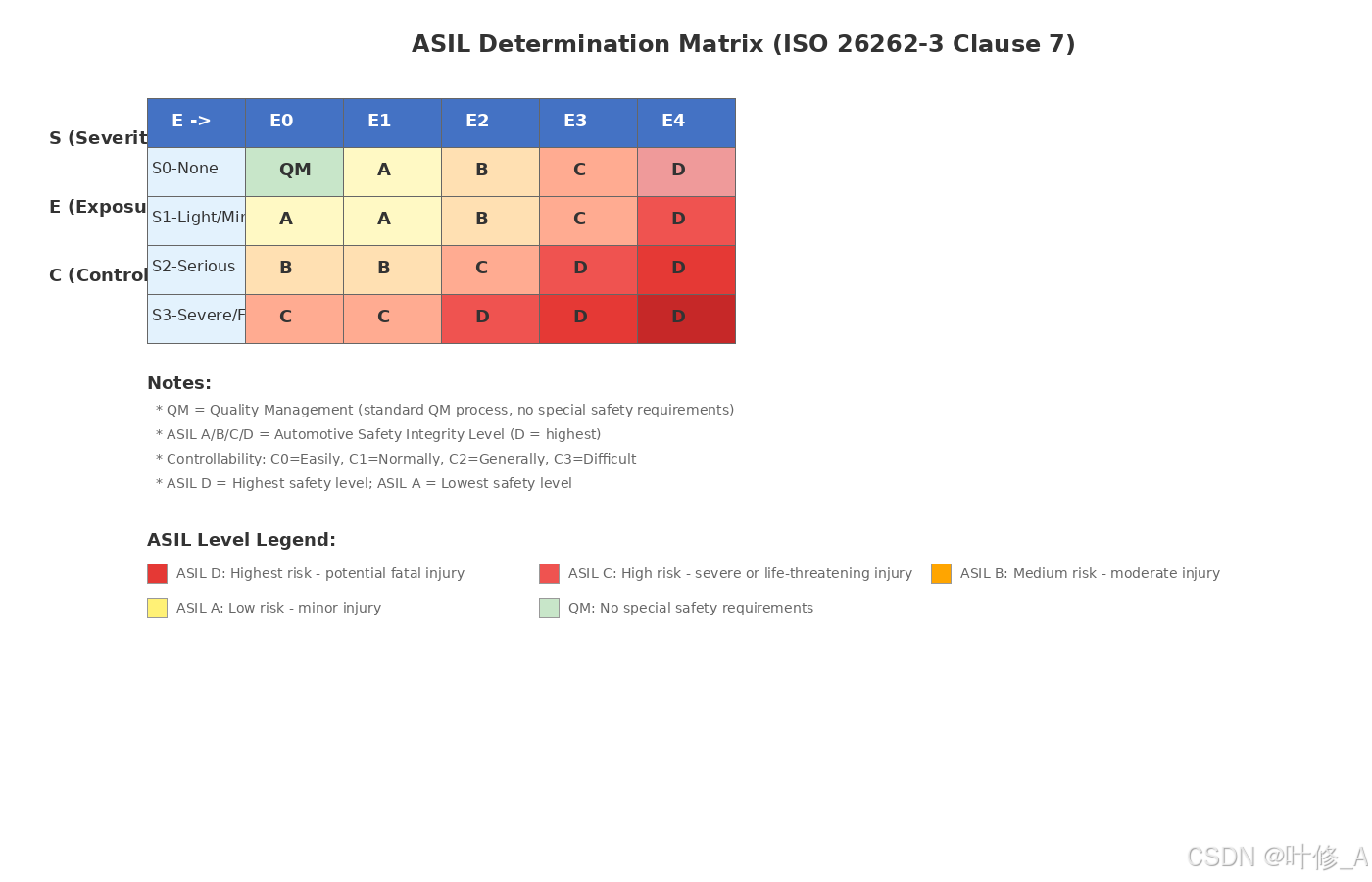
2.5.1 ASIL查表矩阵使用规则
- 首先根据S值确定表格的起始行
- 然后根据E值确定列
- 最终ASIL由S、E、C三者共同决定
2.5.2 ASIL等级含义
| ASIL等级 | 安全要求 | 开发成本倍数 | 典型应用 |
|---|---|---|---|
| ASIL A | 最低 | 1x | 车内娱乐系统 |
| ASIL B | 中等 | 1.5-2x | 仪表显示 |
| ASIL C | 高 | 2-3x | 发动机控制 |
| ASIL D | 最高 | 3-5x | 制动系统、转向系统 |
来源依据:ISO 26262-9:2018 Clause 4.2 "The ASIL shall be determined by the combination of severity, exposure and controllability."
三、工程实践:EPS电动助力转向HARA分析
3.1 案例背景
以**电动助力转向系统(EPS)**为例,演示完整的HARA分析过程。
来源依据:ISO 26262-3:2018 Clause 7.4.2 "The hazard analysis shall be performed with a systematic approach."
3.2 Item定义
相关项名称:电动助力转向系统(EPS)
功能描述:
- 通过电机提供转向助力,辅助驾驶员完成转向操作
- 根据车速和转向扭矩动态调整助力大小
- 提供主动回正功能
边界定义:
- 输入:驾驶员转向指令(扭矩传感器)、车速信号
- 输出:电机助力扭矩
- 接口:CAN总线(与BCM、ECU通信)
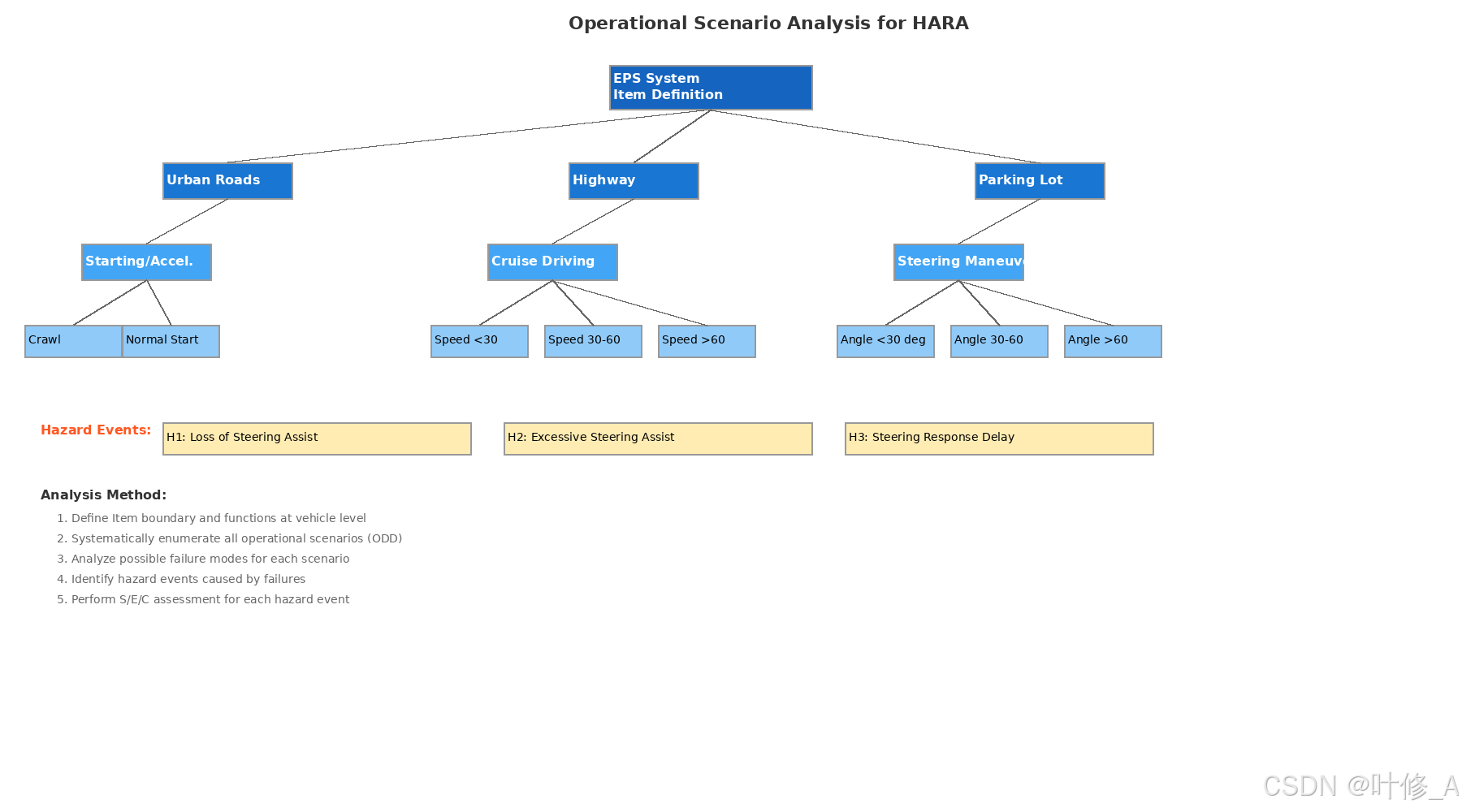
3.3 场景与危害分析
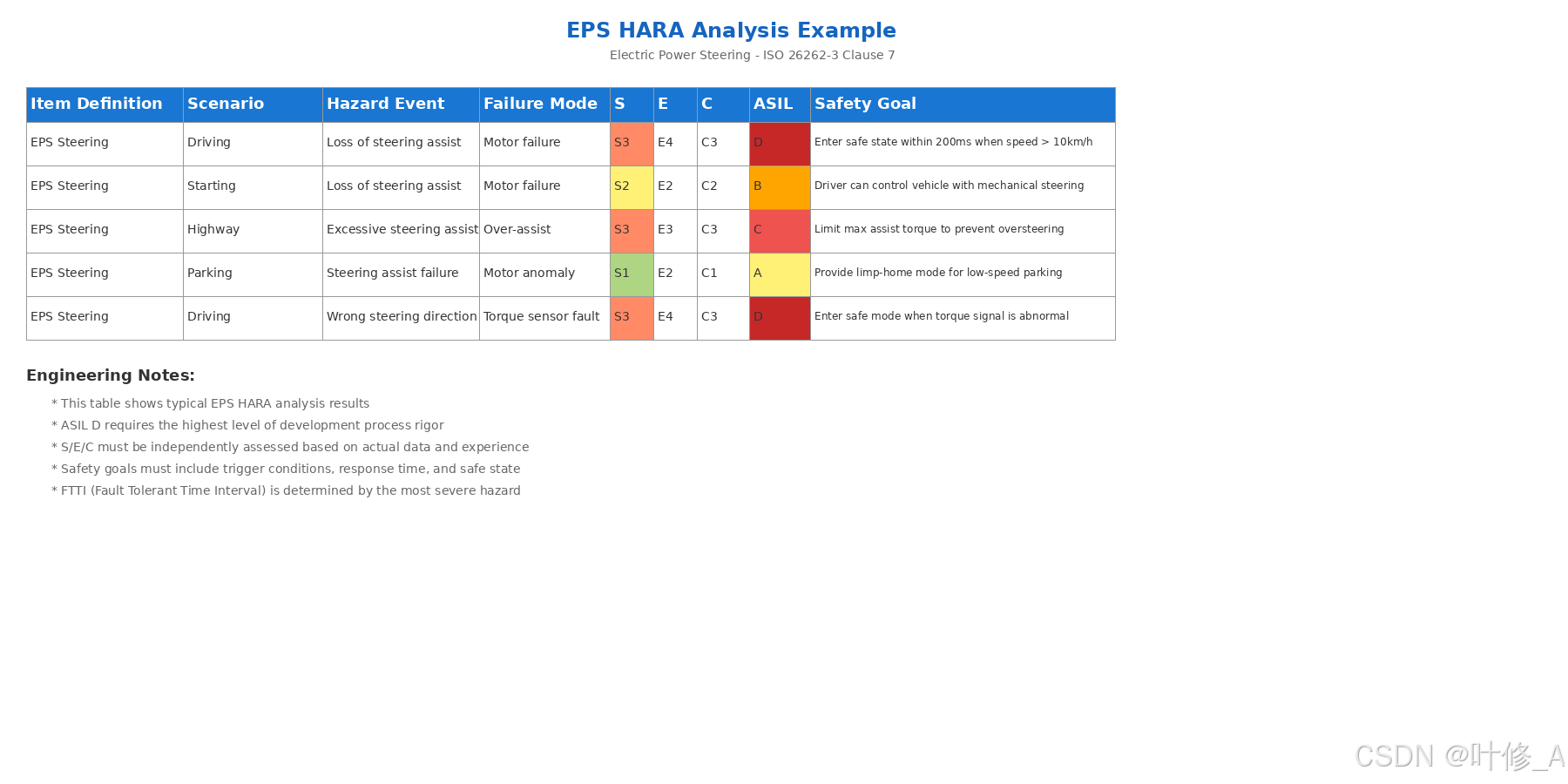
3.4 典型危害事件分析
危害事件H1:转向助力突然丢失
| 属性 | 分析 |
|---|---|
| 运行场景 | 车辆行驶中(E4) |
| 失控模式 | 助力电机完全不工作 |
| 严重度 | S3(高速时失去助力可能导致严重事故) |
| 可控性 | C3(高速时驾驶员难以仅靠机械转向控制车辆) |
| ASIL | ASIL D |
安全目标:
"当车速>10km/h时,检测到助力丢失后200ms内进入安全状态(跛行模式)"
FTTI确定:200ms
来源依据:ISO 26262-3:2018 Clause 9.2 "The safety goals shall define the top-level safety requirements."
3.5 HARA分析的工作产品
完整的EPS HARA分析应输出:
- Item定义文档:明确系统的边界、功能和接口
- 场景枚举清单:覆盖所有ODD的运行场景
- 危害事件列表:包含所有识别的危害事件
- ASIL分配表:每个危害事件对应的ASIL等级
- 安全目标清单:最高层级的安全要求
- FTTI确定记录:故障容错时间间隔
四、HARA常见陷阱与避坑指南
4.1 场景分析不完备
问题表现:
- 只考虑正常驾驶场景,忽略边界条件
- 遗漏极端环境条件(暴雨、冰雪)
- 未考虑驾驶员误操作
解决策略:
- 参考事故数据库(NHTSA、ETSC)
- 采用检查清单确保覆盖
- 引入多方评审
来源依据:ISO 26262-3:2018 Clause 7.3.1 "The operational situations shall consider the reasonably foreseeable misuse."
4.2 ASIL主观降级
问题表现:
- 工程师为了降低开发成本,人为降低S/E/C评级
- 缺乏数据支撑的乐观假设
- 忽视边界情况的严重性
解决策略:
- 建立明确的评级标准
- 要求所有评级都有数据支撑
- 引入独立的安全评审
来源依据:ISO 26262-3:2018 Clause 7.5.2 "The parameters shall be estimated under worst-case conditions."
4.3 安全目标过于笼统
问题表现:
- 安全目标描述模糊,无法指导后续开发
- 缺少具体的触发条件和响应时间要求
- 未定义明确的安全状态
解决策略:
- 采用SMART原则:Specific/Measurable/Achievable/Relevant/Time-bound
- 包含具体的性能指标
- 明确定义安全状态的退出条件
来源依据:ISO 26262-3:2018 Clause 9.2 "The safety goals shall be clearly stated and unambiguous."
4.4 缺乏追溯性
问题表现:
- 无法追溯危害事件到安全目标
- 安全目标与后续设计脱节
- 分析过程文档不完整
解决策略:
- 建立完整的追溯矩阵
- 使用需求管理工具(如DOORS、Jira)
- 保持文档版本控制
五、HARA评审检查清单
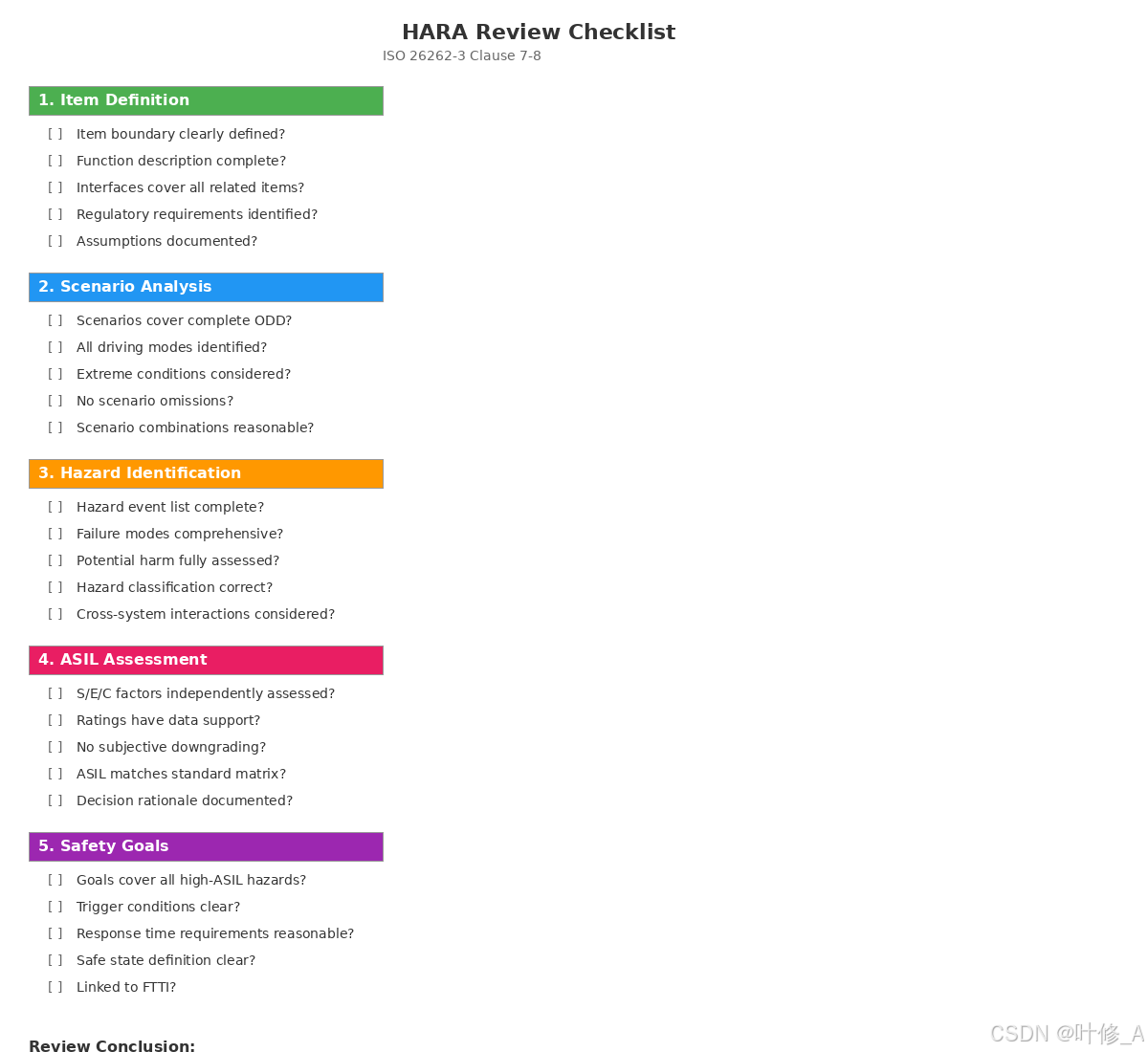
5.1 Item定义完整性检查
- Item边界是否明确定义?
- 功能描述是否覆盖所有预期功能?
- 接口定义是否完整?
- 法规要求是否识别?
- 假设条件是否记录?
5.2 场景分析系统性检查
- 运行场景是否覆盖完整ODD?
- 驾驶模式是否全部识别?
- 环境条件是否考虑极端情况?
- 场景枚举是否有遗漏?
- 场景组合是否合理?
5.3 危害识别完备性检查
- 危害事件清单是否完整?
- 失控模式是否全面?
- 潜在伤害是否充分评估?
- 危害分类是否正确?
- 与其他系统的相互作用是否考虑?
5.4 ASIL评估合理性检查
- S/E/C三因子是否独立评估?
- 评级依据是否有数据支撑?
- 是否存在主观降级?
- ASIL等级是否符合标准矩阵?
- 决策依据是否充分记录?
5.5 安全目标正确性检查
- 安全目标是否覆盖所有高ASIL危害?
- 触发条件是否明确?
- 响应时间要求是否合理?
- 安全状态定义是否清晰?
- 是否与FTTI关联?
六、HARA与其他ISO 26262活动的关系
6.1 HARA → 功能安全概念(FSC)
功能安全概念是将安全目标转化为功能性安全需求的过程:
| 输入 | 活动 | 输出 |
|---|---|---|
| 安全目标 | 功能安全策略设计 | 功能安全需求(FSR) |
| 安全目标 | 安全机制选型 | 安全机制策略 |
| 安全目标 | 安全状态定义 | 安全状态定义 |
来源依据:ISO 26262-3:2018 Clause 9 "The functional safety concept shall specify the functional safety requirements."
6.2 HARA → 技术安全需求(TSR)
技术安全需求是功能安全需求在技术层面的具体化:
安全目标(SG) → 功能安全需求(FSR) → 技术安全需求(TSR)
↑ ↓
└──────────── 安全验证 ←─────────────────┘来源依据:ISO 26262-4:2018 Clause 6 "Technical safety requirements shall be derived from the functional safety requirements."
6.3 HARA → 安全确认
安全确认验证最终产品是否满足HARA阶段制定的安全目标:
| 确认方法 | 目的 | 证据类型 |
|---|---|---|
| 整车级测试 | 验证安全目标在整车环境中实现 | 测试报告 |
| 极端工况测试 | 验证边界条件下的安全行为 | 测试报告 |
| 残余风险评估 | 验证残余风险可接受 | 评估报告 |
来源依据:ISO 26262-4:2018 Clause 10 "The safety validation shall demonstrate that the safety goals are met."
七、第三版HARA发展趋势
ISO 26262第三版(预计2027年发布)正在讨论HARA的以下改进方向:
7.1 自动驾驶场景下的HARA
挑战:
- 驾驶员角色从"操作者"变为"监督者"
- 可控性(C)如何评估?
- ODD边界的明确定义
可能的解决方案:
- 引入新的C评级(系统可控性)
- 扩展ODD分析方法
- 纳入SOTIF协同分析
7.2 机器学习在HARA中的应用
- 自动化场景生成
- 基于数据的S/E/C评估
- 危害事件的模式识别
7.3 敏捷开发环境下的HARA
- HARA的增量更新机制
- Sprint中的HARA维护
- 安全基线的版本管理
八、总结与展望
8.1 核心要点回顾
- HARA是功能安全的起点:所有安全工作的基础
- 五步法流程:Item定义 → 场景分析 → 危害识别 → 风险评估 → ASIL确定
- S/E/C三因子独立评估:确保评估的客观性
- 安全目标是HARA的核心输出:驱动整个产品开发
- 完备性是关键挑战:需要系统化的方法和多轮评审
8.2 工程实践建议
| 阶段 | 建议 |
|---|---|
| 项目启动 | 尽早启动HARA,避免后期发现重大安全问题 |
| 分析过程 | 保持透明,记录所有假设和决策依据 |
| 评审 | 引入多方评审,确保分析完备性 |
| 维护 | 当Item变更时及时更新HARA |
8.3 下一步:从HARA到安全目标
HARA完成后,下一步是FS-05:安全目标与功能安全概念,将HARA输出的安全目标转化为可实现的技术方案。
参考文献
- ISO 26262:2018, Road vehicles --- Functional safety, Part 1-12
- GB/T 34590-2017, 道路车辆功能安全(国标等同采用)
- IEC 61508:2010, Functional safety of electrical/electronic/programmable electronic safety-related systems
- NHTSA, Federal Motor Vehicle Safety Standards
附录:术语表
| 英文术语 | 中文术语 | 定义 |
|---|---|---|
| HARA | 危害分析与风险评估 | Hazard Analysis and Risk Assessment |
| ASIL | 汽车安全完整性等级 | Automotive Safety Integrity Level |
| Item | 相关项 | The system that is subject to hazard analysis |
| Safety Goal | 安全目标 | Top-level safety requirement derived from HARA |
| FTTI | 故障容错时间间隔 | Fault Tolerant Time Interval |
| ODD | 运行设计域 | Operational Design Domain |
| Severity | 严重度 | Potential harm severity |
| Exposure | 暴露度 | Operational situation probability |
| Controllability | 可控性 | Ability to avoid harm |
本文标签:#功能安全 #ISO26262 #汽车电子 #HARA #危害分析 #风险评估 #AUTOSAR #汽车安全 #功能安全工程 #汽车电子安全
本文来源:原创内容,基于ISO 26262:2018标准原文
发表日期:2026-06-30
系列:FS-04 功能安全ISO26262系列(共20篇)